ժҪ
���S����Ϣ���r���ĵ��������ܻ��Ҿӿ���ϵ�y(t��ng)Խ��Խ��ij��F(xi��n)���˂����ճ������У��o�˂������˰�ȫ�����㡢���m������h(hu��n)�����Ҿӭh(hu��n)��Ҳ���Խ��Խ�ɞ��˂��Pע�ğ��c�����������҂��Ҿӭh(hu��n)���бز����ٵģ����ǂ��y(t��ng)�Ĵ�����Ҫ�����IJ������ѽ�(j��ng)���ܝM��F(xi��n)������Ʒ�|(zh��)��Ҫ�������˂����Ҿӭh(hu��n)������˸��ߵ�Ҫ�������ܻ��Ĵ�������ϵ�y(t��ng)���ЏV���đ���ǰ����ᘌ����φ��}���OӋ��һ�N��STC89C52��Ƭ�C����ƺ��ģ����ք��b�ؿ��ơ����r�����Լ���п��ƞ�һ�w�����ܴ�������ϵ�y(t��ng)�����F(xi��n)�˰��ԄӺ��ԄӃɷNģʽ�Ŀ��Ʒ�ʽ�����Ԅ�ģʽ�£�����ͨ�^�˹������Cе���I���F(xi��n)�����������_�ϣ��Ԅ�ģʽ�¼ȿ���ͨ�^�b�ز����팍�F(xi��n)�����������_�ϣ�Ҳ����ͨ�^�������Б������յď������Ԅӿ��ƴ����_�ϣ����ӵ����Ի������ܿ��Ʋ��H�˷��˂��y(t��ng)�������܆�һ���������������ܻ��̶Ȳ��ߵ�ȱ�c�����ҿ��ԝM�㲻ͬ�h(hu��n)�����ϵ�����
һ���}ĿҪ��
һ�� �΄�
�OӋ����һ���������촰���b��
�������AҪ��
1�����I���ƴ�����s��������;ֹͣ����1602��12864�@ʾ��Ϣ��
2������ȫ�_��ȫ�P�����_�P��ֹ�����^�ȴ��_���P�]����?li��n)p�ģ�
3�����ж��r���ܣ�������ָ���r�g���_���P�]������
������չҪ��
1�����ӕr�оƬ�ԫ@�Üʴ_�ĕr�g��Ϣ�����е���ߕr���ܣ������Կ��]�ò��M늙C�Ͷ�C�(q��)�ӿ��ƴ��������ҿ����@ʾ�������ȣ����Sģ�M�(q��)�ӣ���ÿ����OӋ���w�Y��������(j��)�y�Ȳ�ͬ�o�֣��Q���^��Һ����OLED�������ҿ���ͨ�^�t���b���c�֙C�{�����촰����
2���Ӝ؝�Ȃ������������S�r�z�y�҃�(n��i)�؝�ȣ����O�È��b�ã��ض��^�߈�
����չ��
�O�����Nģʽ���ք�ģʽ�����rģʽ�����ģʽ������ͨ�^���I���t���ГQ�����ģʽ�����O�������ޡ�����������(j��)�⏊�Ԅ��{(di��o)��(ji��)�����L�ȡ�
�������F(xi��n)����
1��������ģ���OӋ�ľ��w�Y����
2�����I���ƴ�����s��������;ֹͣ����OLED�@ʾ��Ϣ��
3������ȫ�_��ȫ�P�����_�P��ֹ�����^�ȴ��_���P�]����?li��n)p�ģ�
4������DS1302�r�оƬ�ԫ@�Üʴ_�ĕr�g��Ϣ�����е���ߕr���ܣ���
5���ò��M늙C�(q��)�ӿ��ƴ���������ֵ����늉��Ĵ�С������Ĕ�(sh��)ֵ�����Ρ��ضȵ�׃���ȵ�Ӱ푣�����ϵ�y(t��ng)��(w��n)���ԡ�
6���؝�Ȃ������������S�r�z�y�҃�(n��i)�؝�ȣ����O�È��b�ã��ض��^�߈�
7�����ж��r���ܣ�������ָ���r�g���_���P�]������
8���O�������Nģʽ���b��ģʽ�����rģʽ�����ģʽ��������ͨ�^���I�ГQ�����ģʽ��������(j��)�⏊�Ԅӿ��ƴ������_�ϡ����������Ԅ����ϣ����ϴ����ԄӴ��_��
�����OӋ����
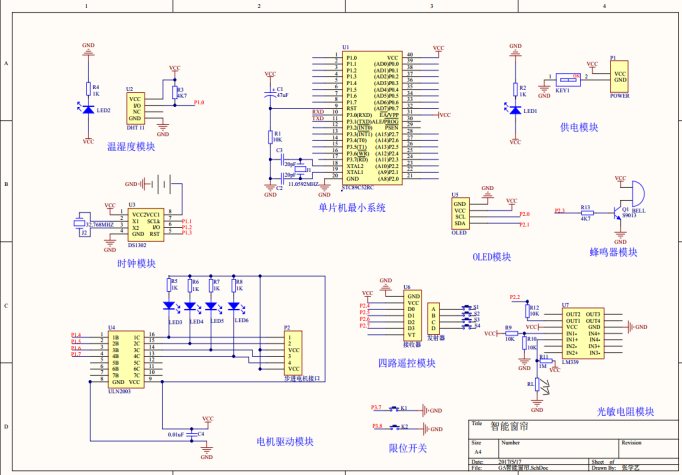
3.1 Ӳ���OӋ���w���
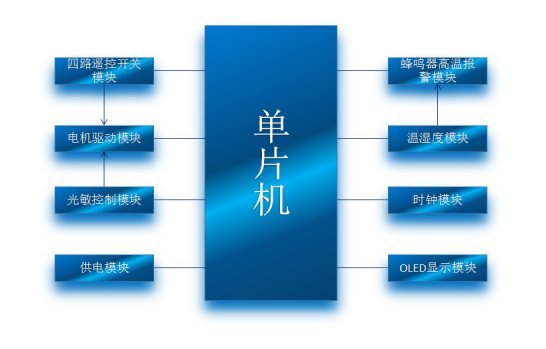
�����OӋ����STC89C52RC��Ƭ�C��Һ���@ʾ��OLED���Լ�ULN2003늙C�(q��)������ϵ�y(t��ng)����Ҫģ�K����Ƭ�C���������OӋ�Ŀ���������OLED�����@ʾ��������·�b���_�Pģ�K����������ģ�K���������ܴ������\�ӿ���ģ�K��ϵ�y(t��ng)��D��3-1��ʾ
�D3-1
3.2 ����оƬSTC89C52
�����OӋ����STC89C52�������оƬ��STC89C52��STC��˾���a(ch��n)��һ�N���ġ�������CMOS8λ������������8K��ϵ�y(t��ng)�ɾ���Flash�惦����STC89C52ʹ�ý�(j��ng)���MCS-51��(n��i)�ˣ������˺ܶ�ĸ��Mʹ��оƬ���Ђ��y(t��ng)51��Ƭ�C���߂�Ĺ��ܡ��چ�оƬ�ϣ������`�ɵ�8λCPU����ϵ�y(t��ng)�ɾ���Flash��ʹ��STC89C52�鱊��Ƕ��ʽ���Ƒ���ϵ�y(t��ng)�ṩ���`�����Ч�Ľ�Q�������������˜ʹ��ܣ�8k�ֹ�(ji��)Flash��512�ֹ�(ji��)RAM��32λI/O�ھ������T�����r������(n��i)��4KBEEPROM��MAX810��λ�·��3��16λ���r��/Ӌ��(sh��)����4���ⲿ�Д࣬һ��7����4���Д�Y�������݂��y(t��ng)51��5����2���Д�Y������ȫ�p�����пڡ�����STC89C52�ɽ���0Hz�o�B(t��i)߉������֧��2�Nܛ�����x��(ji��)�ģʽ�����eģʽ�£�CPUֹͣ���������SRAM�����r��/Ӌ��(sh��)�������ڡ��Д��^�m(x��)��������늱��o��ʽ�£�RAM��(n��i)�ݱ����棬��ʎ�������Y����Ƭ�Cһ�й���ֹͣ��ֱ����һ���Д��Ӳ����λ��ֹ������\���l��35MHz��6T/12T���x����D3-2��ʾ
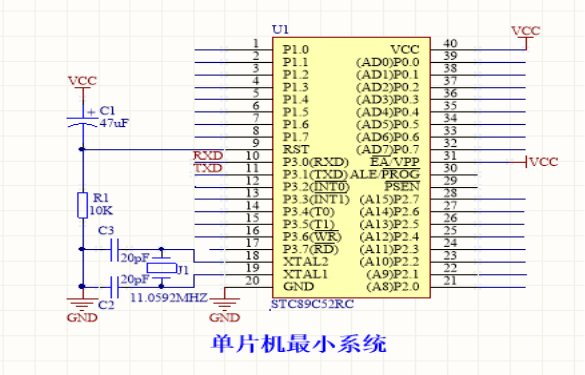
�D3-��
3.3 Һ���@ʾ�����xȡ���ӿ��OӋ�����OӋ��Һ�������xȡ����Ҫ���]��OLED12864�cLCD12864�@�ɷN�^�鳣�õ���̖��OLED12864�ă�(y��u)�c����
1��OLEDֻ��Ҫ�Ă�I/O�ӿڣ��oϵ�y(t��ng)��(n��i)������ģ�K��(ji��)ʡ�˴�����I/O�ڣ�
2��OLED���������l(f��)�⣬��LCD�t���ܡ�����OLED��LCDҪ���ö࣬���⣬OLED���ȶȸ���ɫ��Ч�������S����
3��LCD��Ҫ���������c������OLED����Ҫ�c���Ć�Ԫ�ż�늣�����늉��ܵͣ���˸��ӹ�(ji��)�ܣ�
4��OLED�]��ҕ�Ƿ��������ƣ���ҕ��һ������_��160�ȣ�����Ҳ��LCD�p�Ķࣻ
���Ⱥ�Q���xȡOLED12864���鱾���OӋ���@ʾ���� 3-�����·�ӿڿ�D��
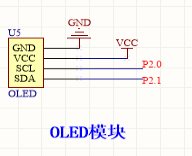
�D3-��
3.3.1 Һ���@ʾ��OLED12864�ַ����@ʾ
OLED12864�@ʾģ�K�@ʾ����128�С�64�У�ʹ��1Ƭ��64��ݔ�������(q��)������2Ƭ���(q��)�ӿ�����������ÿƬ���(q��)������64·ݔ������ �(q��)�����cMCU�]���Pϵ��ֻҪ�ṩ�Դ���ܮa(ch��n)���(q��)����̖��ͬ����̖��ģ�K���ⲿ��̖�H�c���(q��)�������P�����(q��)������(n��i)��64��64λ�@ʾ�惦����RAM���֞� 8퓣�ÿ�8��;�@ʾ���ϸ������c�@ʾ��B(t��i)�c�@ʾ�惦����λ��(sh��)��(j��)һһ�������@ʾ�惦���Ĕ�(sh��)��(j��)ֱ������D���@ʾ���(q��)����̖���顰1���@ʾ���顰0�����@ʾ��3.3.��OLED12864��Ҫ���g����(sh��)1.0.96��OLED�@ʾ�����(q��)��оƬ�飺SSD13062.�ӿ���ͣ�IIC3.OLED12864���_���x��GND���Դ��VCC���Դ���O�����3.3-5V��SCL��IIC�r犾�SDA��IIC��(sh��)��(j��)��3.4�r�ģ�KDS1302
DS1302������DALLAS��˾�Ƴ���һ�N�����ܡ����ĵČ��r�r�оƬ������31�ֹ�(ji��)�o�B(t��i)RAM������SPI�����ӿ��cCPU�M��ͬ��ͨ�ţ����ɲ���ͻ�l(f��)��ʽһ���Ͷ����ֹ�(ji��)�ĕr���̖��RAM��(sh��)��(j��)�����r�r犿��ṩ�롢�֡��r���ա����ڡ��º��꣬һ����С�c31��r�����Ԅ��{(di��o)�����Ҿ����c���a�����ܡ�����늉����_2.5��5.5V�������p�Դ��늣����Դ�͂����Դ�������O�Â����Դ��늷�ʽ���ṩ�ˌ����Դ�M��丼������늵�������DS1302�c��Ƭ�C֮�g�ܺ��εز���ͬ�����еķ�ʽ�M��ͨ�ţ��H������I/O������λ��RST����I/O��(sh��)��(j��)�������Еr犣�SCLK�����r�/RAM���x/����(sh��)��(j��)��һ�ֹ�(ji��)����_31�ֹ�(ji��)���ַ��M��ʽͨ�š�DS1302�����r���ĺܵͣ����֔�(sh��)��(j��)�͕r���Ϣ�r������С��1mW��
DS1302���ⲿ���_������D3-4-1��ʾ����(n��i)���Y����D3-4-2��ʾ��DS1302���ڔ�(sh��)��(j��)ӛ䛣��e�nj�ijЩ�����������x�Ĕ�(sh��)��(j��)�c��ӛ��ϣ��܌��F(xi��n)��(sh��)��(j��)�c���F(xi��n)ԓ��(sh��)��(j��)�ĕr�gͬ�rӛ䛣���ˏV�������ڜy��ϵ�y(t��ng)�С�
DS1302�����_������D3-4-1
�D3-4-1
�����_�Ĺ��ܞ飺
VCC1 늳����_
VCC2 ���Դ���_
��Vcc2>Vcc1+0.2V�r����Vcc2��DS1302��늣�
��Vcc2< Vcc1�r����Vcc1��DS1302��늡�
SCLK�����Еr犣�ݔ�룬���Ɣ�(sh��)��(j��)��ݔ���cݔ����
I/O�������ӿڕr���p��(sh��)��(j��)����
X1��X2��32.768kHz�������_
GND ��
RST ��λ
I/O ��(sh��)��(j��)ݔ��/ݔ��
��(n��i)���Y����D3-4-2
�D3-4-2 DS1302��(n��i)���Y���D
DS1302������·�����Ԍ��������Դ�Ŀɳ��늳س�늣������x����ʹ�ܺʹ���Ķ��O�ܔ�(sh��)Ŀ�����{(di��o)��(ji��)늳س��늉���
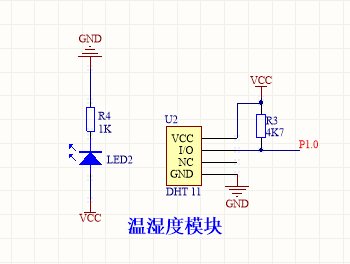
3.5�؝��ģ�K
DHT11��(sh��)�֜؝�Ȃ�������һ�����У�ʔ�(sh��)����̖ݔ���Ĝ؝�ȏͺς������������Ì��õĔ�(sh��)��ģ�K�ɼ����g�͜؝�Ȃ��м��g���_���a(ch��n)Ʒ���ИO�ߵĿɿ��Ժ�Խ���L�ڷ�(w��n)���ԡ�����������һ�����ʽ�Н�Ԫ����һ��NTC�y��Ԫ�������cһ��������8λ��Ƭ�C���B�ӡ����ԓ�a(ch��n)Ʒ����Ʒ�|(zh��)Խ������푑������ɔ_���������ԃr�ȘO�ߵȃ�(y��u)�c��ÿ��DHT11���������ژO�龫�_�ĝ��У������M��У�ʡ�У��ϵ��(sh��)�Գ������ʽ����OTP��(n��i)���У���������(n��i)���ڙz�y��̖��̎���^����Ҫ�{(di��o)���@ЩУ��ϵ��(sh��)���ξ��ƴ��нӿڣ�ʹϵ�y(t��ng)����׃�ú���ݡ���С���w�e���O�͵Ĺ��ģ�ʹ��ɞ�ԓ����У��ڿ��̑��È��ϵ�����x�a(ch��n)Ʒ��4ᘆ������_���b���B�ӷ��㡣�B����D3-5
�D3-5
��̖��DHT11
����(sh��)��
������ȣ�
�ֱ��ʣ�0.1%RH 16Bit
���ȣ�25�� ��ؓ %2
�ضȣ�
�ֱ��ʣ�0.1%RH 16Bit
���̷�����25�� ��ؓ0.2�� �� -40�� ~ -80��
푑��r�g��1/e(63%) 10S
늚����ԣ����DC3.5 - 5.5V ��� 0.3mA ���C60uA
�ɘ����ڣ�ÿ�δ���2��
���_�f��
1��VDD ��� 3.5V-5.5V DC
2��I/O ���Д�(sh��)��(j��)���ο�������횽�������� 5.1K���ң��@�ӿ��e�r DATA���Ǟ���ƽ
3��GND �ӵأ��Դؓ�O
4��NC ���_
��(sh��)��(j��)��ʽ��
8bit�������(sh��)��(sh��)��(j��) + 8bit���С��(sh��)��(sh��)��(j��) + 8bint�ض�����(sh��)��(sh��)��(j��) + 8bit�ض�С��(sh��)��(sh��)��(j��) + 8bitУ�λ
У��㷨��
����ȡ��ضȵ�����(sh��)С��(sh��)�ۼӣ�ֻ������8λ��
̎�����ӿ�(P1.0)�cDHT11ͨ�żs����
���ĽY����DHT11��ęC����Ƭ�C�������C�� ֻ�����C���ЏęC���ęC���ܑ���
Ԕ��������
��Ƭ�C�l(f��)����ʼ��̖ -> DHT푑���̖ -> DHT֪ͨ��Ƭ�C�ʂ������̖ -> DHT�l(f��)�͜ʂ�õĔ�(sh��)��(j��) -> DHT�Y����̖-> DHT��(n��i)���y�h(hu��n)���؝�Ȕ�(sh��)��(j��)��ӛ䛔�(sh��)��(j��)�ȴ���һ�Ά�Ƭ�C����ʼ��̖��
��Ƭ�C��ʼ��̖��
1���O��P1.0���_��ݔ����B(t��i)��ݔ�����ƽ
2���ٌ�P1.0ݔ������ƽ�����m(x��)�r�g����18ms���˕rDHT�z�y����ĵ���ģʽ->����ģʽ
3��P1.0���_�O�Þ�ݔ���B(t��i)���������������Pϵ��P1.0��׃?y��u)���ƽ���Ķ����һ����ʼ��̖�?/div>
THD푑���̖���ʂ���̖��
��DHT�چ�Ƭ�C P1.0���_ݔ�����ƽ�r���ĵ���ģʽ�D(zhu��n)������ģʽ���ȴ�P1.0���_׃?y��u)���ƽ�?/div>
1��DHTݔ�� 80us���ƽ ���鑪����̖
2��DHTݔ�� 80us���ƽ ֪ͨ̎�����ʂ���ܔ�(sh��)��(j��)
3���B�m(x��)�l(f��)�� 40λ��(sh��)��(j��)���ϴβɼ��Ĕ�(sh��)��(j��)��
DHT��(sh��)��(j��)��̖��
��(sh��)��(j��)�顰0����ʽ��50us�ĵ��ƽ + 26-28us�ĸ��ƽ
��(sh��)��(j��)�顰1����ʽ��50us�ĵ��ƽ + 70us�ĸ��ƽ
DHT�Y����̖��
DHT��I/O���_ݔ��40λ��(sh��)��(j��)���^�m(x��)ݔ�����ƽ50us���D(zhu��n)��ݔ���B(t��i)������������裬I/O�S֮׃?y��u)���ƽ��DHT��(n��i)���_ʼ�y�h(hu��n)���؝�Ȕ�(sh��)��(j��)����ӛ䛔�(sh��)��(j��)���ȴ��ⲿ����ʼ��̖��
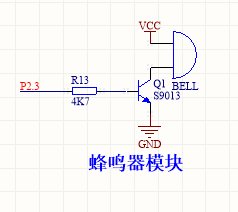
3.6���Q����ģ�K
늴�ʽ���Q���(q��)��ԭ����
���Q���l(f��)ԭ�������ͨ�^늴ž�Ȧ��ʹ늴ž�Ȧ�a(ch��n)���ň����(q��)�����Ĥ�l(f��)�ģ������Ҫһ������������(q��)��������Ƭ�CIO���_ݔ��������^С����Ƭ�Cݔ����TTL�ƽ�������(q��)�Ӳ��˷��Q���������Ҫ����һ������Ŵ���·����Ƭ�C����ͨ�^һ�����O��S9013���Ŵ��(q��)�ӷ��Q����ԭ��DҊ����D3-6��
�D3-6
��D��ʾ�����Q�������O�ӵ�VCC����5V���Դ���棬���Q����ؓ�O�ӵ����O�ܵļ�늘OC�����O�ܵĻ���B��(j��ng)�^�������R1���Ɇ�Ƭ�C��P2.3���_���ƣ���P2.3ݔ�����ƽ�r�����O��T1��ֹ���]��������^��Ȧ�����Q�����l(f��)����P2.3ݔ�����ƽ�r�����O�܌�ͨ���@�ӷ��Q��������γɻ�·���l(f��)��������ˣ��҂�����ͨ�^�������P2.3�_���ƽ��ʹ���Q���l(f��)�������P�]��
3.7늙C�(q��)��ģ�K
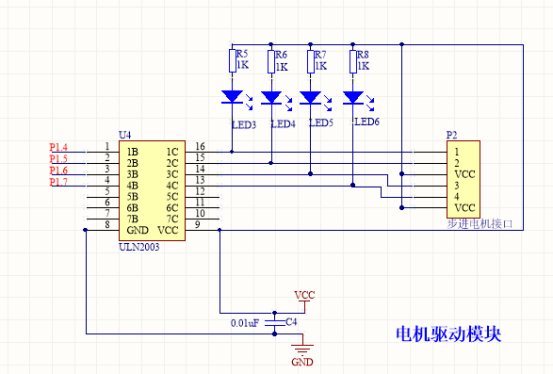
������Ƭ�CSTC89C52�����ಽ�M늙C�M�� ���ƕr����Ҫͨ�^I/O��ݔ������һ���r��ķ������鲽�M늙C�Ŀ�����̖�����H��ԓTTL�ƽ�o��ֱ���(q��)��늙C���������74LS373�M���(q��)��늙C����������S��Ĵ��������(q��)�ӣ���˿��]늙C�(q��)��оƬULN2003���(q��)�Ӳ��M늙C��
1 �(q��)��оƬULN2003 ULN2003��һ�N���͉�����������_���D� �У����߂�NPN�_���D�ܽM�ɡ�ÿһ���_���D����(li��n)һ��2.7K�Ļ��O��裬��5V�Ĺ���늉����cTTL��CMOS�·ֱ�����B������ֱ��̎����Ҫ�˜�߉���_����̎���Ĕ�(sh��)��(j��)�� ULN2003�ă�(n��i)���Y����D1����������_500mA���������P�B(t��i)�r�܉����50V��늉��������ڸ�ؓ�d����²���ݔ���\�С����У��Ɇ�Ƭ�CSTC89C52��P1.4-P1.7�_����ULN2003��1��4��ݔ��������ɵIJ��M늙C�(q��)���·��D2��
�D3.7
1.���M늙C�nj���}�_��̖�D(zhu��n)׃?y��u)��λ�ƻ�λ�Ƶ��_�h(hu��n)����Ԫ�����ڷdz��d����r�£�늙C���D(zhu��n)�١�ֹͣ��λ��ֻȡ�Q���}�_��̖���l�ʺ��}�_��(sh��)��������ؓ�d׃����Ӱ푣����o늙C��һ���}�_��̖��늙C�t�D(zhu��n)�^һ������ǡ��@һ�����Pϵ�Ĵ��ڣ����ϲ��M늙Cֻ�������Ե��`����o�۷e�`������c��ʹ�����ٶȡ�λ�õȿ����I���ò��M늙C������׃�ķdz��ĺ��Ρ�������ͨ�^�����}�_����(sh��)�����ƽ�λ�������Ķ��_���ʴ_��λ��Ŀ�ģ�ͬ�r������ͨ�^�����}�_�l�ʁ�����늙C�D(zhu��n)�ӵ��ٶȺͼ��ٶȣ��Ķ��_���{(di��o)�ٵ�Ŀ�ġ�
2. �(q��)��늙C 늙C�(q��)�ӵ��P�IҪ�c���Ǿ��_����늙C���D(zhu��n)�ĽǶȡ������OӋ�rҪ����(j��)����������Ϣ�Д����D(zhu��n)�����Ա������������D(zhu��n)�ӷ����ӳ����������Ƴ���քe�������}�_����Ҫ�����������ģ�ͣ����Д��Ƿ������D(zhu��n)����׃�}�_���ȷ�ʽ�팍�F(xi��n)늙C�{(di��o)�١������OӋ�r�Ѳ��M늙C�Ŀ��Ʒ�ʽ�����ɿ���ģ�ͣ����Ԕ�(sh��)��(j��)����ʽ���ڳ���惦���У������üĴ����M��Ӌ��(sh��)�_�����Ʋ��M늙C�D(zhu��n)�ӵIJ���(sh��)��
3.8�������ģ�K
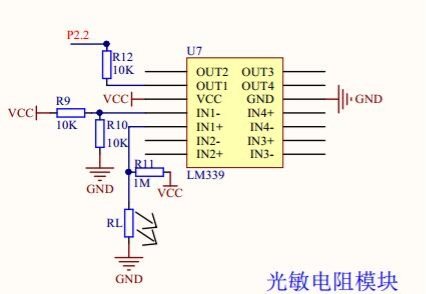
ԓϵ�y(t��ng)���Ԅ�ģʽ���ɹ������ģ�K������늙C���(q��)�ӏĶ��_�������Ԅ��������������_������Ŀ�ġ���������оƬ��LM339��LM339��������治���{(di��o)���\��Ŵ�����ÿ�����^���Ѓɂ�ݔ��˺�һ��ݔ���ˡ��ɂ�ݔ���һ���Q��ͬ��ݔ��ˣ��á�+����ʾ����һ���Q�鷴��ݔ��ˣ��á�-����ʾ���������^�ɂ�늉��r������һ��ݔ��˼�һ���̶�늉�������늉���Ҳ�Q���T���ƽ�������x��LM339ݔ�빲ģ�������κ�һ�c������һ�˼�һ�������^����̖늉�������+����늉����ڡ�-���˕r��ݔ���ܽ�ֹ���ஔ��ݔ�����_·������-����늉����ڡ�+���˕r��ݔ����ͣ��ஔ��ݔ���˽ӵ��λ���ɂ�ݔ���늉���e����10mV���ܴ_��ݔ����һ�N��B(t��i)�ɿ����D(zhu��n)�Q����һ�N��B(t��i)����ˣ���LM339��������̖�z�y�Ȉ����DZ��^����ġ�LM339��ݔ�����ஔ��һֻ���Ӽ�늘O���ľ��w���O�ܣ���ʹ�Õrݔ���˵����Դһ��횽�һֻ��裨�Q��������裬�x3-15K�����x��ͬ��ֵ����������Ӱ�ݔ���˸��λ��ֵ����鮔ݔ�����w���O�ܽ�ֹ�r�����ļ�늘O늉�������ȡ�Q����������cؓ�d��ֵ�����⣬�����^����ݔ�������S�B����һ��ʹ�á���������cLM339�B����D3-8��
�D3-8
R9��R10ͨ�^�։���ݔ�뵽IN1-��늉���2.5V������r���������ֵ��ݔ�뵽IN1+��늉�ֻ�����c�������O�ܽ�ֹ��������r����������ֵ׃��ݔ�뵽IN1+��늉����_��4V���ң����O�܌�ͨ���(q��)��늙C���ϴ�����
3.9��·�b���_�P
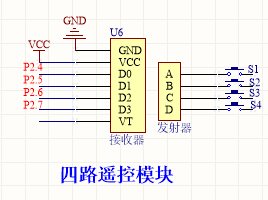
�o����b������RF Remote Control�������ßo�����̖���h���ĸ��N�C���M�п��Ƶ��b���O�䡣��Ҋ�ğo��늰l(f��)�����ģ�K���õğo����b��ϵ�y(t��ng)һ��ְl(f��)��ͽ��Ճɂ����֡��l(f��)�䲿��һ��֞�ɷN��ͣ����b�����c�l(f��)��ģ�K���b�������b��ģ�K�nj���ʹ�÷�ʽ���f�ģ��b�������Ԯ�һ�����C������ʹ�ã������������нӾ����^�����b��ģ�K���·�Ю�һ��Ԫ����ʹ�ã�����(j��)�����_���x�M�Б��ã�ʹ���b��ģ�K�ă�(y��u)�����ڿ��Ժ͑����·���o�p���B�ӡ��w�eС���r��͡������ղ���һ����fҲ�֞�ɷN��ͣ���������c���������շ�ʽ�����������{(di��o)�·Ҳ�Q�������z���·�������H���ǹ������gЪ��ʎ��B(t��i)�µ������z���·�������ʽ���{(di��o)�·�c����������C��ͬ�������O��һ���C��ʎ�·�a(ch��n)����ʎ��̖���c���յ����d�l��̖���l�õ����l��̖����(j��ng)���l�Ŵ�͙z�������{(di��o)����(sh��)��(j��)��̖�������ʽ�Ľ�������(w��n)�����`���ȸߡ����ɔ_����Ҳ�����^�á�
��ģʽ���ГQ�����Nָ����\�м�������·�b���ϣ����Ă����I�Ĺ��܌��F(xi��n)������c��Ƭ�C���B����D3-9��ʾ
�D3-9
ԓϵ�y(t��ng)�������Nģʽ�ɹ��x���xD���I��ģʽ�ГQ��
��OLED��Ļ���@ʾģʽ��M�֘ӕr���ք��b��ģʽ���ڴ�ģʽ��A���I�鴰�����ϣ�B���I��ֹͣ늙C�\�У�C���I�鴰�����_��
��OLED��Ļ���@ʾģʽ��D�֘ӕr���Ԅ�ģʽ�������������½���һ���̶�֮���Ԅ����ϣ���������������һ���̶ȴ����ԄӴ��_��
��OLED��Ļ���@ʾģʽ��T�֘ӕr�鶨�rģʽ���ɶ��r�������ϣ���I��ʾ������_����O��ʾ�����ڴ�ģʽ��B���I�����ڕr�����Լ�I/O֮�g��λ��A���I��+1��C���I��-1��
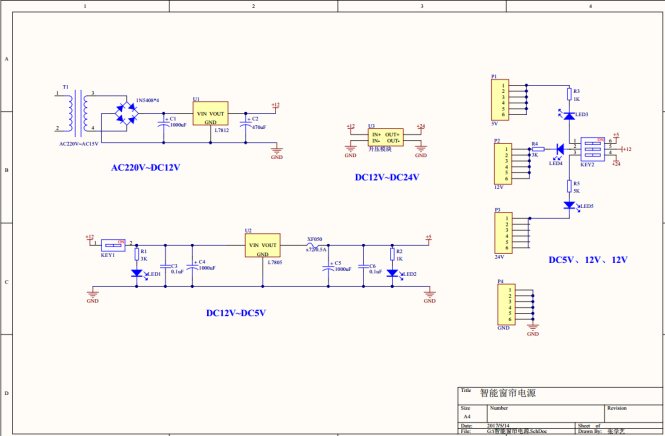
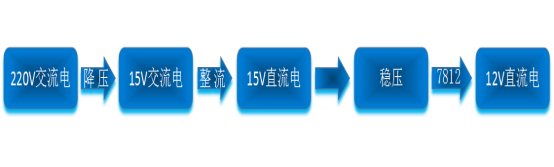
3.10 220V-12V׃��ģ�K
220v�D(zhu��n)12v��(w��n)���Դ����Ҫ�Ƚ��������������ٷ�(w��n)�������_��Ҫ��
�·����ԭ����D3-10-1
�D3-10-1
��׃����ݔ����15V�����ͨ�^��ʽ����׃��15Vֱ��늣��ٽ�(j��ng)�^
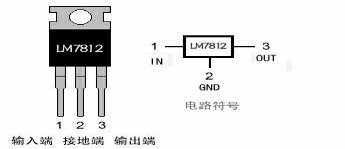
LM7812���_�D��D3-10-2
�D3-10-2
�·�OӋ��D3-10-3
�D3-10-3
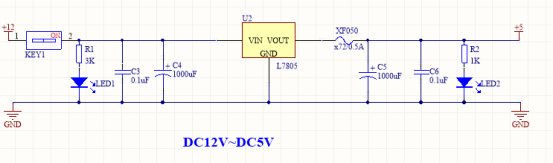
3.11 12V-5V׃��ģ�K
LM7805�dz��õ����˷�(w��n)������һ��ʹ�õ���TO-220���b�����ṩDC 5V��ݔ��늉������÷����V����(n��i)���^�����^�d���o�·����ɢ��Ƭ�r�ܳ��m(x��)�ṩ1A����������ʹ�������������߀���ṩ��ͨ��늉��������
LM7805���_�D��D3-11-1
�D3-11-1
�·�OӋ��D3-11-2
�D3-11-2
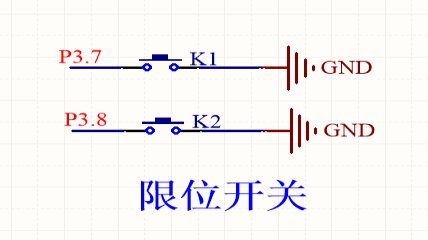
3.12 ��λ�_�P
�D3-12
�ġ��OӋ����
�҂�?n��i)����ˏ��D(zhu��n)�ꌣ�I(y��)��һ������_ʼ��һ�������mȻ���H�������Á��J��ɻ�ĕr�g������̫�࣬��������@����_�������ˡ�
�����f����һ�_ʼ���Լ��]��ʲô��(j��ng)�����ںܶ����Ϣ���e�`�ģ��@һ�c�Ĵ_��Ҫ��ʡ����֪�����ӌ�Փ�ģ���֪��Ҫ�Լ������ӣ���֪��������OӋ���ǰ��퓣����܉���һЩ�����ˣ����ԣ��@һ�c���Ժ�Ҳ��Ҫ�M�������ɡ�
��Ƭ�C�����Ǻ��y��ֻ���^�ǽY����ܛ����Ӳ�����ѣ����ֻ�nj�Ӳ���Dz���ģ�ͻ���������һ�ѵ�ַ��Ԓ��Ҳ��so esay�ģ�ֻ���f�w�f��߀��Ҫ�����`�ģ����f�IJ��y���Ǜ]���҂��������y��ֻҪ�_̤���أ������y���҂������@����Ʒ����Ȼ�܉��C���˰ɡ�
�����浽��Ҫ�OӋ�r�Űl(f��)�F(xi��n)�⿿�����ϵ�֪�R�����h�h����ġ��f�����OӋ��Ҫ�õ�����������]���^�ģ����Բ���ֻ�����ڕ����ϵ�֪�R���mȻ�o��(sh��)�ε�ӑՓ���炃Ҳ�Р�����Ҳ�в��������ǿ��w���f�҂���ϵ�߀���e���o�s���s���o��(sh��)�{(di��o)ԇ��һ�δ�ʧ����һ�δθ��ģ��҂��OӋ�������������Ʒ���õ����nj��H�����Ľ�(j��ng)�ի@�����֮�g�����x�������[�U�_��һ��ָ�ˣ��҂����ӵ�ͬ�r��Ҳ���Լ��ĈF�������һ�����ġ�
���p��С����Ѫ�ⷽ�������Ǜ_��ʮ�㣬��������һ�����X�����и����뷨�������e���M���`�^(q��)���Լ�������������ͬ��Ҳ���˼ҵ���w�����˹ȵף��@�Ӻܲ������_չ���ԵĹ��������Ļ�����Ąţ���ʹ�Dz��fԒ���oͬ��һ�����o�Ŀ��g˼�����}Ҳ���cȼ�����еĻ�ˎͰ���õöࡣ�����º���ô�f�������������鮔�������_���@�����ӣ���ֻ���f��������δ�ɹ���ͬ־����Ŭ������
�mȻֻ�ǎׂ��µ�Ŭ�������Džsʹ�҂�����һ�������Ժ������·���҂�һ�����^�m(x��)Ŭ����ȥ���x�x�WУ�o�҂��@�ӵęC�����x�x�ώ����҂��Ľ̌����ã����r���f�@ô��ɣ��Ҳ�����ϡ���Ϳ�ض��^�@���W�ڣ�Уِ�ѽ�(j��ng)�^��M��ؽY���ˣ�ͦ�_�ĵġ�
��1���·ԭ��D��
1��
���Ʋ���
2.�Դ����
��2�������������H�����������
#include <REG52.h>
#include "main.h"
#include "dht11.h"
#include "oled.h"
#include "bmp.h"
#include "ds1302.h"
#include "motor.h"
#include "key.h"
sbit beep=P2^3;
unsigned int t,j;
unsigned char a,b,c,d;
unsigned int i,num,numm,flag,flag1;
unsigned char number;
unsigned char str[5];
unsigned char hour1,minute1,second1;
void display();
void main(void)
{
while(1)
�����������ڱ���ƪ�� ���´��aՈ��51�����d������������
����Փ�����d��word��ʽ �ɾ�����
http://www.raoushi.com/bbs/dpj-87017-1.html





 ����TQQ:125739409;���g����QQȺ281945664
����TQQ:125739409;���g����QQȺ281945664









 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��