本帖最后由 51黑黑黑 于 2016-2-12 22:21 編輯
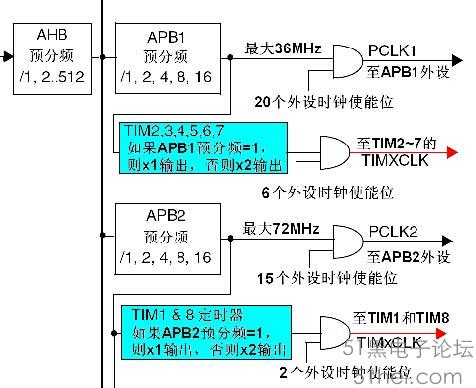
STM32的定時器是個強大的模塊,定時器使用的頻率也是很高的,定時器可以做一些基本的定時,還可以做PWM輸出或者輸入捕獲功能。從系統框架圖下看,名為TIMx的有八個,其中TIM1和TIM8掛在APB2總線上,而TIM2-TIM7則掛在APB1總線上。其中TIM1&TIM8稱為高級控制定時器(advancedcontroltimer).他們所在的APB2總線也比APB1總線要好。APB2可以工作在72MHz下,而APB1最大是36MHz。
由上圖可知,當APB1的預分頻系數為1 時,這個倍頻器不起作用,定時器的時鐘頻率等于APB1的頻率;當APB1的預分頻系數為其它數值(即預分頻系數為2、4、8 或16)時,這個倍頻器起作用,定時器的時鐘頻率等于APB1的頻率兩倍。也就是,當APB1不分頻,TIM3的時鐘速度為36MHz,當2分頻是,APB1變成18MHz,但是TIM又會倍頻,即TIM時鐘等于18*2=36MHz。這里我們用向上計數的方式,即TIMx_CNT中的計數值達到TIMx_ARR中的值時,產生中斷,TIMx_CNT又從0開始計。
按以下步驟編程:
1.系統初始化,主要初始化時鐘等。
2.GPIO初始化,用于LED,有了燈就便于觀察了。
3.TIM3的配置。
4.NVIC的配置。
5.編寫中斷服務函數。
void GPIO_PA_Init()
{//PA8管腳配置
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_DeInit(GPIOA);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_8;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_10MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;//推挽輸出
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO,ENABLE);//使能端口時鐘A
GPIO_Init(GPIOA,&GPIO_InitStructure);
}
void TIMER3_Init()
{
TIM_TimeBaseInitTypeDefTIM_TimeBaseStructure;
TIM_DeInit(TIM3);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
TIM_TimeBaseStructure.TIM_Period=10000;//ARR的值
TIM_TimeBaseStructure.TIM_Prescaler=7200-1;
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;//向上計數模式
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseStructure);
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE);
TIM_Cmd(TIM3, ENABLE); //開啟時鐘
}
void NVIC_Configuration()
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0); // 搶占式優先級別
NVIC_InitStructure.NVIC_IRQChannel =TIM3_IRQChannel;//指定中斷源
NVIC_InitStructure.NVIC_IRQChannelSubPriority =0;// 指定響應優先級別1
NVIC_InitStructure.NVIC_IRQChannelCmd =ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
int main(void)
{
Stm32_Clock_Init(9); //系統時鐘設置
delay_init(72); //延時初始化
GPIO_PA_Init();
TIMER3_Init();
NVIC_Configuration();
while(1);
}
void TIM3_IRQHandler()
{
if(TIM_GetITStatus(TIM3 , TIM_IT_Update) ==SET)
{
TIM_ClearITPendingBit(TIM3 ,TIM_FLAG_Update);
if(GPIO_ReadOutputDataBit(GPIOA,GPIO_Pin_8))GPIO_ResetBits(GPIOA, GPIO_Pin_8);
else GPIO_SetBits(GPIOA,GPIO_Pin_8);
}
}
脈沖寬度調制(PWM),是英文“Pulse WidthModulation”的縮寫,簡稱脈寬調制,是利用微處理器的數字輸出來對模擬電路進行控制的一種非常有效的技術。簡單一點,就是對脈沖寬度的控制。一般用來控制步進電機的速度等等。STM32的定時器除了TIM6和TIM7之外,其他的定時器都可以用來產生PWM輸出,其中高級定時器TIM1和TIM8可以同時產生7路的PWM輸出,而通用定時器也能同時產生4路的PWM輸出。
PWM輸出模式
STM32的PWM輸出有兩種模式,模式1和模式2,由TIMx_CCMRx寄存器中的OCxM位確定的(“110”為模式1,“111”為模式2)。模式1和模式2的區別如下:
110:PWM模式1-在向上計數時,一旦TIMx_CNT<TIMx_CCR1時通道1為有效電平,否則為無效電平;在向下計數時,一旦TIMx_CNT>TIMx_CCR1時通道1為無效電平(OC1REF=0),否則為有效電平(OC1REF=1)。
111:PWM模式2-在向上計數時,一旦TIMx_CNT<TIMx_CCR1時通道1為無效電平,否則為有效電平;在向下計數時,一旦TIMx_CNT>TIMx_CCR1時通道1為有效電平,否則為無效電平。
由此看來,模式1和模式2正好互補,互為相反,所以在運用起來差別也并不太大。
而從計數模式上來看,PWM也和TIMx在作定時器時一樣,也有向上計數模式、向下計數模式和中心對齊模式,關于3種模式的具體資料,可以查看《STM32參考手冊》的“14.3.9 PWM模式”一節,在此就不詳細贅述了。
PWM輸出管腳
PWM的輸出管腳是確定好的,具體的引腳功能可以查看《STM32參考手冊》的“8.3.7 定時器復用功能重映射”一節。在此需要強調的是,不同的TIMx有分配不同的引腳,但是考慮到管腳復用功能,STM32提出了一個重映像的概念,就是說通過設置某一些相關的寄存器,來使得在其他非原始指定的管腳上也能輸出PWM。但是這些重映像的管腳也是由參考手冊給出的。比如說TIM3的第2個通道,在沒有重映像的時候,指定的管腳是PA.7,如果設置部分重映像之后,TIM3_CH2的輸出就被映射到PB.5上了,如果設置了完全重映像的話,TIM3_CH2的輸出就被映射到PC.7上了。
PWM輸出信號
PWM輸出的是一個方波信號,信號的頻率是由TIMx的時鐘頻率和TIMx_ARR預分頻器所決定的,具體設置方法在前面一個學習筆記中有詳細的交代。而輸出信號的占空比則是由TIMx_CRRx寄存器確定的。其公式為“占空比=(TIMx_CRRx/TIMx_ARR)*100%”,因此,可以通過向CRR中填入適當的數來輸出自己所需的頻率和占空比的方波信號。
按以下步驟配置:
1. 設置RCC時鐘;
2. 設置GPIO時鐘;
3. 設置TIMx定時器的相關寄存器;
4. 設置TIMx定時器的PWM相關寄存器;
第1步設置RCC時鐘已經在前文中給出了詳細的代碼,在此就不再多說了。需要注意的是通用定時器TIMx是由APB1提供時鐘,而GPIO則是由APB2提供時鐘。注意,如果需要對PWM的輸出進行重映像的話,還需要開啟引腳復用時鐘AFIO。
第2步設置GPIO時鐘時,GPIO模式應該設置為復用推挽輸出GPIO_Mode_AF_PP,如果需要引腳重映像的話,則需要用GPIO_PinRemapConfig()函數進行設置。
第3步設置TIMx定時器的相關寄存器時,和前一篇學習筆記一樣,設置好相關的TIMx的時鐘和技術模式等等。
第4步設置PWM相關寄存器,首先要設置PWM模式(默認情況下PWM是凍結的),然后設置占空比(根據前面所述公式進行計算),再設置輸出比較極性:當設置為High時,輸出信號不反相,當設置為Low時,輸出信號反相之后再輸出。最重要是是要使能TIMx的輸出狀態和使能TIMx的PWM輸出使能。相關設置完成之后,就可以通過TIM_Cmd()來打開TIMx定時器,從而得到PWM輸出了。
以下是我寫的參考程序:
void GPIO_PA_Init()
{//PA13管腳配置
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_DeInit(GPIOA);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;//復用推挽輸出
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO,ENABLE);//使能端口時鐘A
GPIO_Init(GPIOA,&GPIO_InitStructure);
}
void TIMER3_Init()
{
TIM_TimeBaseInitTypeDefTIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
TIM_DeInit(TIM3);
TIM_InternalClockConfig(TIM3);
TIM_TimeBaseStructure.TIM_Period=10000-1;//ARR的值周期10K
TIM_TimeBaseStructure.TIM_Prescaler=0;
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;//向上計數模式
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseStructure);
}
void TIMER3_PWM_Init()
{
TIM_OCInitTypeDef TIMOCInitStructure;
TIMOCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//PWM模式1輸出
TIMOCInitStructure.TIM_Pulse=0;//占空比=(CCRx/ARR)*100%
TIMOCInitStructure.TIM_OCPolarity =TIM_OCPolarity_High;//TIM輸出比較極性高
TIMOCInitStructure.TIM_OutputState =TIM_OutputState_Enable;//使能輸出狀態
TIM_OC2Init(TIM3,&TIMOCInitStructure);//TIM3的CH2輸出
TIM_CtrlPWMOutputs(TIM3,ENABLE);//設置TIM3的PWM輸出為使能
TIM_Cmd(TIM3, ENABLE); //開啟時鐘
}
|









 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

