|
|
1.紅外遙控的四個(gè)重要環(huán)節(jié)
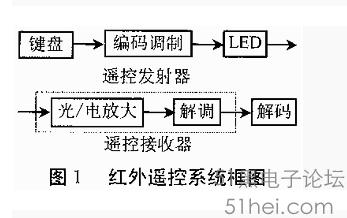
(1)紅外傳感器的配套使用紅外發(fā)射傳感器和紅外接收傳感器配套使用,就組成了一個(gè)紅外線遙控系統(tǒng)。?
(2)信號(hào)的調(diào)制與解調(diào)。
紅外遙控信號(hào)是一連串的二進(jìn)制脈沖碼。
(3)編碼與解碼
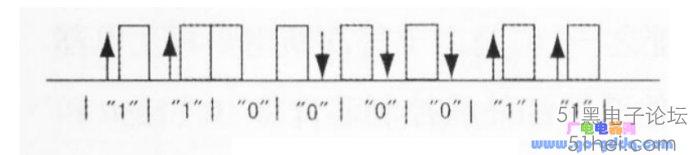
方式一
PPM(脈沖位置編碼)方式在脈沖位置編偶方式下,每一位二進(jìn)制數(shù)所占用的時(shí)間是一樣的,只是傳號(hào)脈沖的位置有所不同。空號(hào)在前、傳號(hào)在后的表示“1”,傳號(hào)在前、空號(hào)在后的表示“0”。下圖是采用脈沖位置編碼方式對(duì)“0”和“1”進(jìn)行編碼的示意圖。?
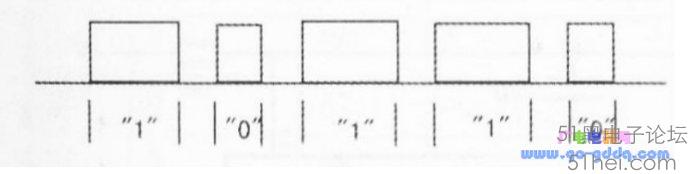
方式二
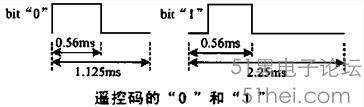
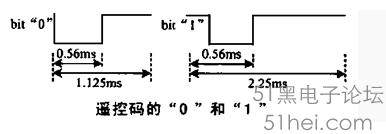
PWM(脈沖寬度編碼)方式脈沖寬度編碼方式是根據(jù)傳號(hào)脈沖的寬度來(lái)區(qū)別二進(jìn)制數(shù)的“0”和“1”的。傳號(hào)脈沖寬的是“1”,傳號(hào)脈沖窄的是“0”,而每位二進(jìn)制數(shù)之間則用等寬的空號(hào)來(lái)進(jìn)行分隔。下圖是用脈沖寬度編碼方式對(duì)“0”和“1”進(jìn)行編碼的示意圖。?
 ?發(fā)送端 ?發(fā)送端
 ?接收端 ?接收端
解碼的關(guān)鍵是如何識(shí)別“0”和“1”!!
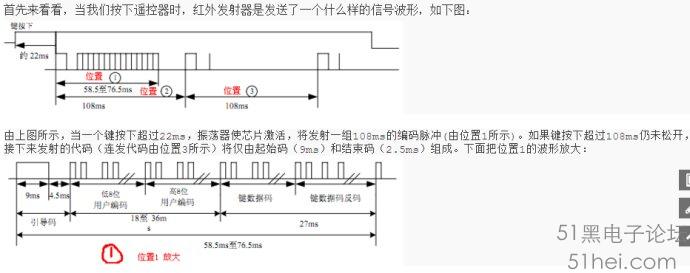
從位的定義我們可以發(fā)現(xiàn)“0”、“1”均以0.56ms的低電平開(kāi)始,不同的是高電平的寬度不同!,“0”為0.56ms,“1”為1.68ms,所以必須根據(jù)高電平的寬度區(qū)別“0”和“1”。
如果從0.56ms低電平過(guò)后,開(kāi)始延時(shí),0.56ms以后,若讀到的電平為低,說(shuō)明該位為“0”,反之則為“1”,為了可靠起見(jiàn),延時(shí)必須比0.56ms長(zhǎng)些,但又不能超過(guò)1.12ms,否則如果該位為“0”,讀到的已是下一位的高電平,因此取(1.12ms+0.56ms)/2=0.84ms最為可靠,一般取0.84ms左右均可。根據(jù)碼的格式,應(yīng)該等待9ms的起始碼和4.5ms的結(jié)果碼完成后才能讀碼。
?(4)紅外線信號(hào)傳輸協(xié)議
數(shù)據(jù)傳輸?shù)母袷竭M(jìn)行了嚴(yán)格的規(guī)定,以確保發(fā)送端和接收端之間數(shù)據(jù)傳輸?shù)臏?zhǔn)確無(wú)誤。
紅外遙控傳輸協(xié)很多,不少大的電氣公司,如NEC、Pliilips、Sharp、Sony等,均制定有自己的紅外線信號(hào)傳輸協(xié)議?。?
|
|











 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩
