一、案例說明
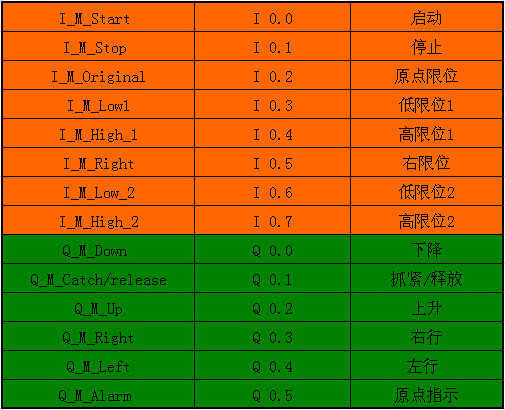
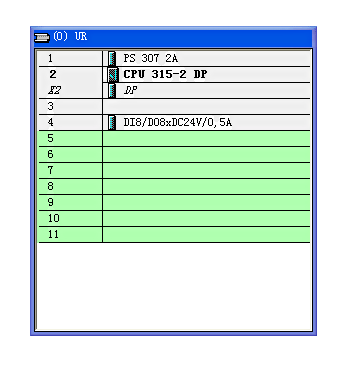
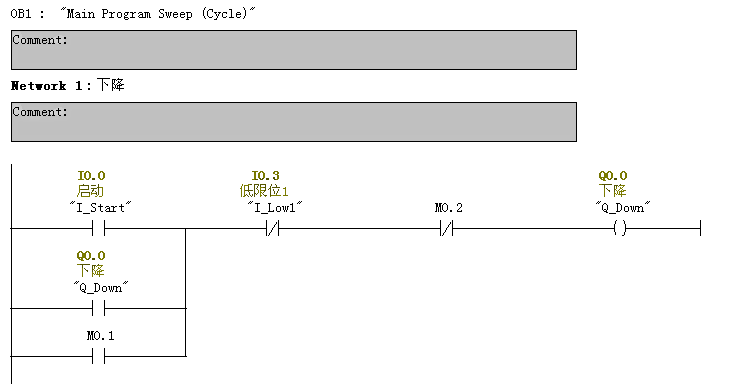
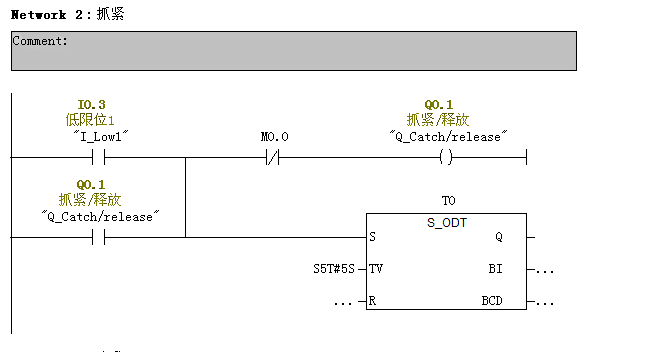
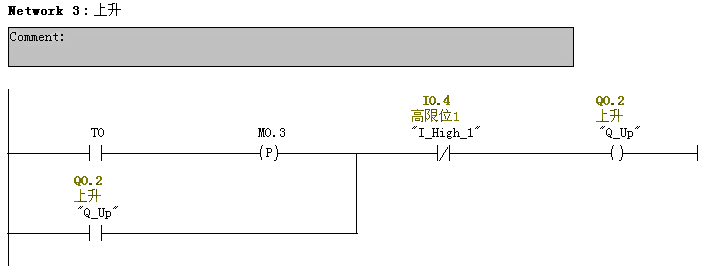
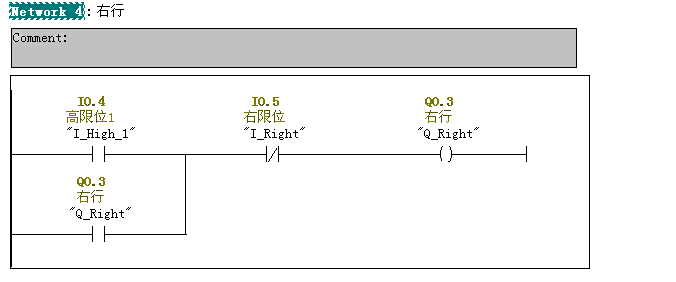
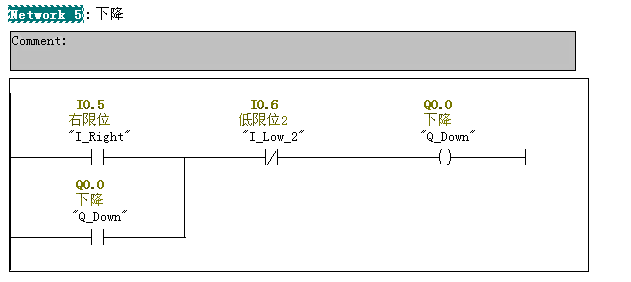
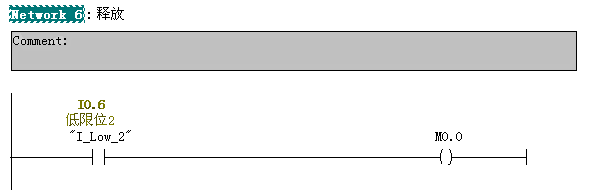
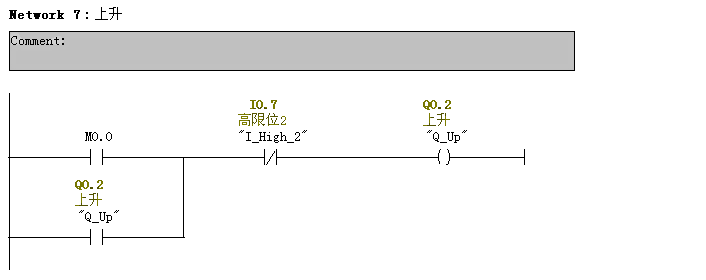
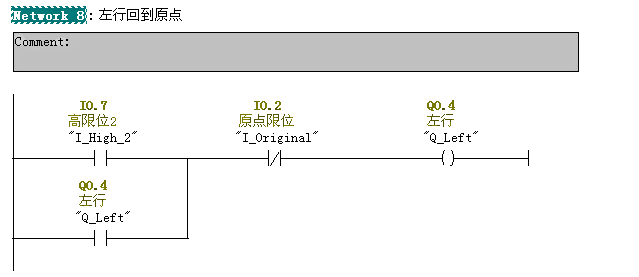
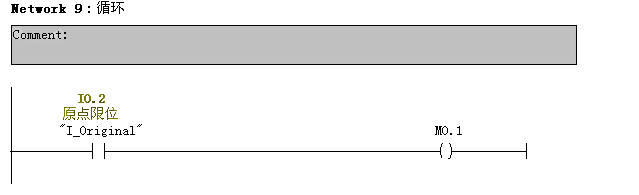
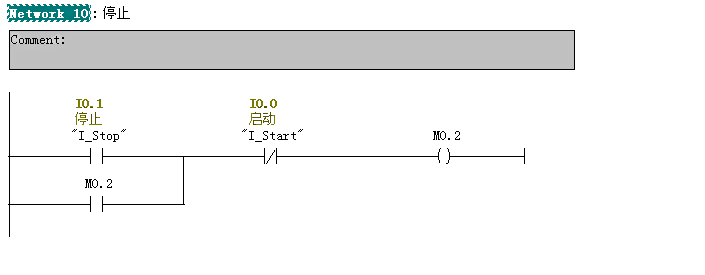
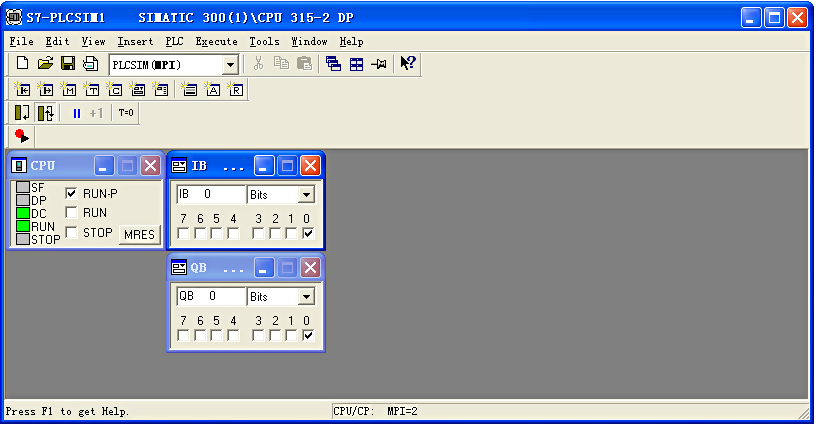
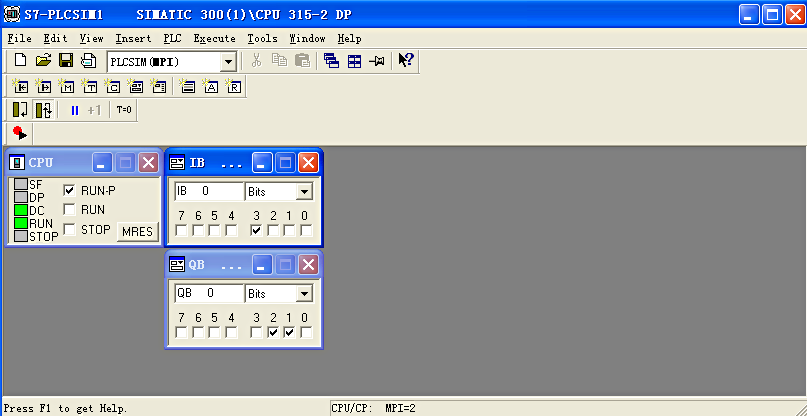
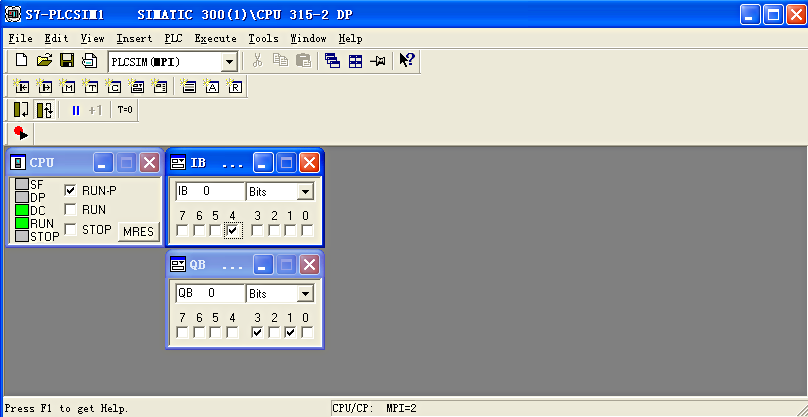
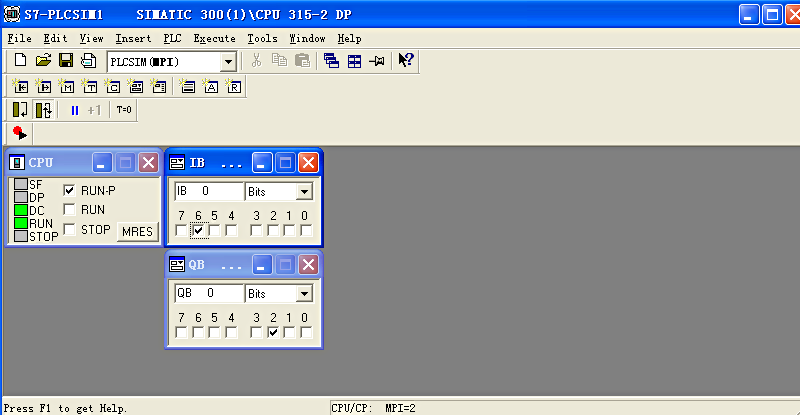
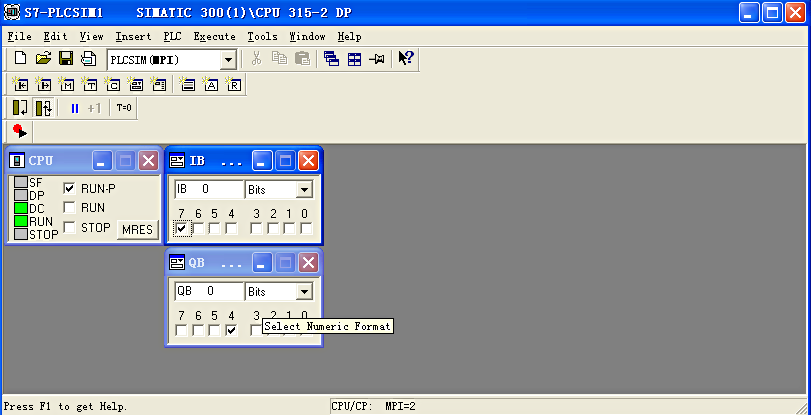
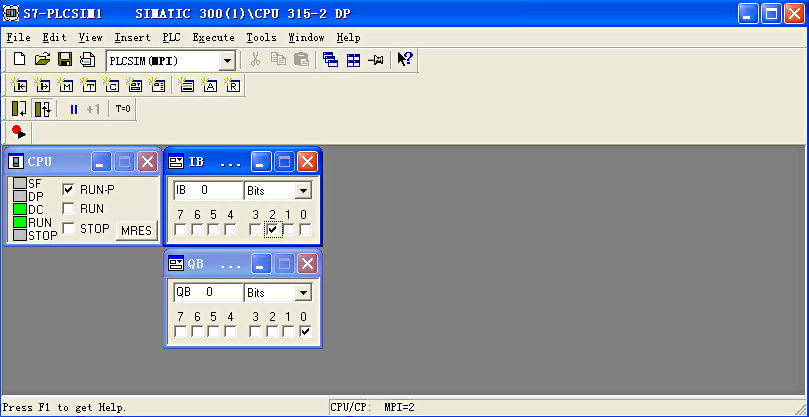
現(xiàn)有機(jī)械臂一個(gè),要求按下啟動(dòng)按鈕機(jī)械臂向下運(yùn)動(dòng),當(dāng)機(jī)械臂觸發(fā)低限位開關(guān)1,機(jī)械手加緊工件,5S后機(jī)械手向上運(yùn)動(dòng)并觸發(fā)高限位開關(guān)1,觸發(fā)高限位開關(guān)1后機(jī)械手向右運(yùn)動(dòng),并觸發(fā)右限位開關(guān),觸發(fā)右限位開關(guān)后機(jī)械手向下運(yùn)動(dòng)并觸發(fā)低限位開關(guān)2,觸發(fā)低限位開關(guān)2后機(jī)械手釋放工件并向上運(yùn)動(dòng)并觸發(fā)高限位開關(guān)2,觸發(fā)高限位開關(guān)2后機(jī)械手向左回到原點(diǎn)并重復(fù)整套工序,同時(shí)要求當(dāng)按下停止按鈕時(shí)如果整套工序沒有完成,完成剩余工序后停止。 二、案例分析 該案例共有8個(gè)工步分別為機(jī)械臂的: 向下移動(dòng)-----加緊工件-----向上移動(dòng)-----向右移動(dòng)----向下移動(dòng)-----釋放工件-----向上移動(dòng)-----回到原點(diǎn) 對(duì)以上工步分析可以得到I/O分布如下圖所示 通過以上I/O分布進(jìn)行PLC硬件組態(tài)如下圖所示 硬件組態(tài)完成后創(chuàng)建符號(hào)表對(duì)上訴I/O進(jìn)行定義分配如下圖所示 三、編程 四、仿真 點(diǎn)擊啟動(dòng)按鈕I0.0 PLC發(fā)出下降指令Q0.0 機(jī)械臂向下移動(dòng)并觸發(fā)低限位1I0.3,同時(shí)機(jī)械手發(fā)出加緊指令Q0.1加緊工件,5S后機(jī)械臂發(fā)出向上移動(dòng)指令Q0.2 機(jī)械臂向上移動(dòng)觸發(fā)高限位1I0.4,機(jī)械臂停止上移,發(fā)出右移指令Q0.3 機(jī)械臂向右移動(dòng)觸發(fā)右限位I0.5,機(jī)械臂停止右移,發(fā)出下降指令Q0.0 機(jī)械臂向下移動(dòng)觸發(fā)低限位2 I6.0,機(jī)械臂停止向下移動(dòng),同時(shí)機(jī)械手收回加緊指令Q0.1松開工件并發(fā)出上升指令Q0.2 機(jī)械臂向上移動(dòng)觸發(fā)高限位2 I0.7,機(jī)械臂停止向上移動(dòng),發(fā)出左行指令Q0.4 機(jī)械臂向左返回原點(diǎn)觸發(fā)原點(diǎn)限位指令I(lǐng)0.2,機(jī)械臂停止向左移動(dòng),發(fā)出下降指令Q0.0開始新一輪工序的循環(huán)。
|