���s�������ęn�������ȫ���Y�ϡ�
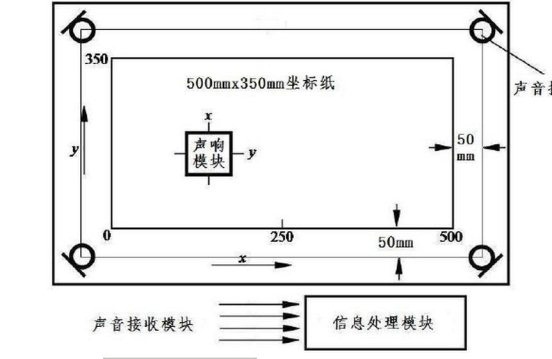
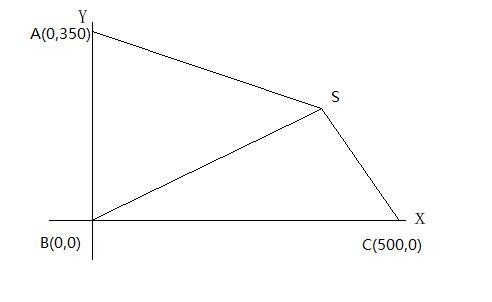
�O(sh��)Ӌ(j��)һ������λϵ�y(t��ng)����һ�K������ 1m2 ��ƽ�����Nһ�� 500mm��350mm ������(bi��o)���������Ľ����(c��)�քe�̶����bһ��(g��)������ģ�K��������ģ�Kͨ�^(gu��)��(d��o) ��������̖(h��o)��ݔ?sh��)���Ϣ̎��ģ�K������λϵ�y(t��ng)����(j��)�ģ�Kͨ�^(gu��)�՚������ ��������ģ�K������̖(h��o)���ж��ģ�K���ڵ�λ������(bi��o)��ϵ�y(t��ng)�Y(ji��)��(g��u)ʾ��D�� �D 1 ��ʾ��
2.1 Ҫ�� �D 1 ����λϵ�y(t��ng)�Y(ji��)��(g��u)ʾ��D
(1) �O(sh��)Ӌ(j��)����һ��(g��)�ģ�K������̖(h��o)�a(ch��n)���·���Ŵ��·���͓P(y��ng)���ȣ� ÿ���Iһ�ΰl(f��)һ�Σ�����̖(h��o)���m(x��)�r(sh��)�g�s�� 1s��Ҫ���ģ�K���� 5V ����� �ع�늣����IJ����� 200mW�� (2) �O(sh��)Ӌ(j��)������·������ģ�K���������L(f��ng)���Ŵ��·�ȽM�ɣ����քe�c�� Ϣ̎��ģ�K���B�ӣ��Ա㌢����̖(h��o)��������Ϣ̎��ģ�K�� (3) �O(sh��)Ӌ(j��)����һ��(g��)��Ϣ̎��ģ�K��Ҫ��ԓģ�K�ܸ���(j��)��������ģ�K����(l��i)�� ��̖(h��o)�Д��ģ�K����λ�õ� x��y ����(bi��o)�����Ԕ�(sh��)����ʽ�@ʾ x��y ����(bi��o)ֵ��λ�� ����(bi��o)ֵ�`��Ľ^��(du��)ֵ������ 30mm�� 3.1 �f(shu��)�� (1) ע���A(y��)���y(c��)���ģ�K���ĵ����늉�����̖(h��o)�Ŵ��·ݔ����̖(h��o)�Ĝy(c��)ԇ �c(di��n)�� (2) ��������(g��)������ģ�K���Ɍ�(sh��)�F(xi��n)��λ�����Ă�(g��)ģ�K�Ɍ�(du��)��λ���M(j��n)һ��У ���� (3) �����S�ģ�K�c�����·���κ��B�ӣ���Ҫ�����ģ�K���������@ ��(bi��o)ӛ���Ա��������xģ�K��������(bi��o)��(sh��)ֵ�� (4) ע����ͨ�^(gu��)�����������|(zh��)����(l��i)��Ӱ푡� �������w�O(sh��)Ӌ(j��)�c����
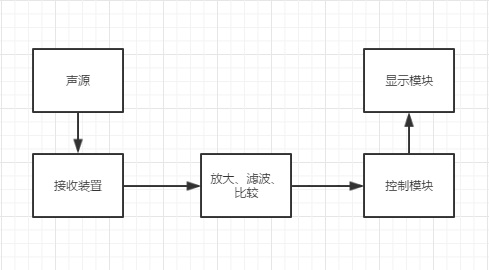
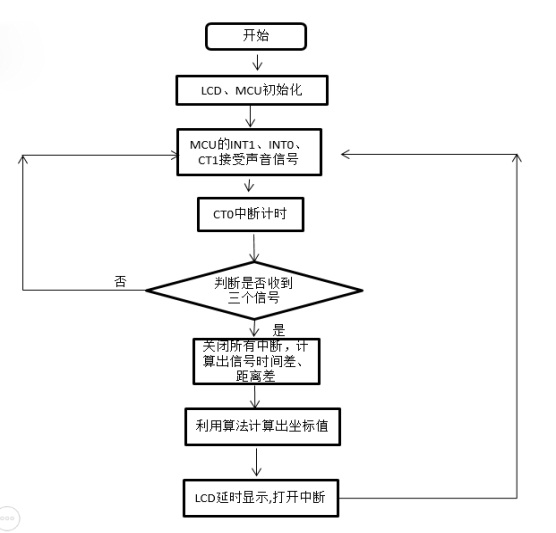
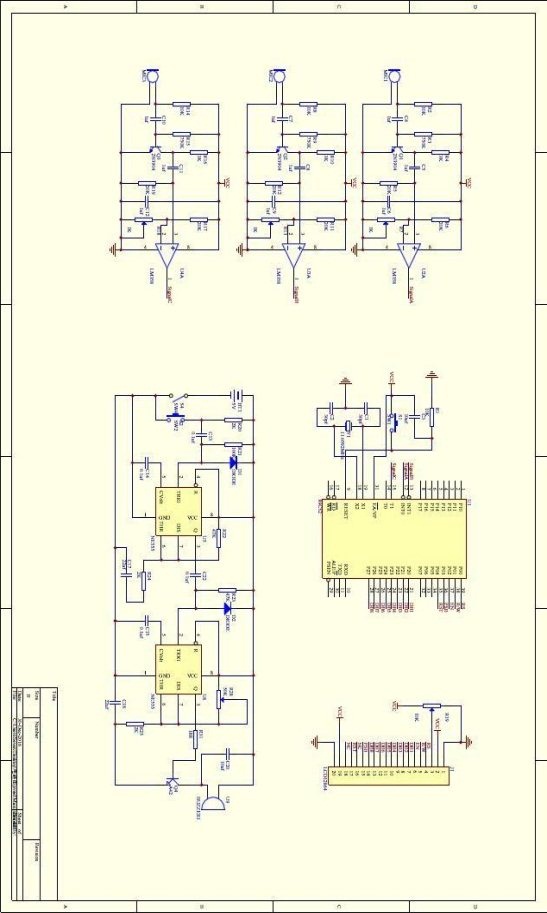
���ˌ�(sh��)�F(xi��n)�����O(sh��)Ӌ(j��)��Ҫ��ϵ�y(t��ng)��횾߂����¹��ܣ����IԴ�l(f��)�ҳ��m(x��)�r(sh��) �g 1s������������̖(h��o)�Ŵ�V����Դ��λ�ȹ��ܡ���ϵ�y(t��ng)��Ҫ���Ԅ��֞飺 �ģ�K��������ģ�K�����������@ʾģ�K�� �����w�ķ����ϣ��ģ�K���� 555 �η�(w��n)�B(t��i)��ʎ�·��(l��i)�_(d��)��ÿ���Iһ�ΰl(f��)һ�� �Ĺ��ܡ����������ģ�K�a(ch��n)��������̖(h��o)���f������ģ�K�r(sh��)��ʮ�����ģ��� ��������ģ�K��횺��ОV�����Ŵ�ͱ��^�ȭh(hu��n)��(ji��)���Ա��|�l(f��)�������M(j��n)���\(y��n)��� ̎���������O(sh��)Ӌ(j��)�����˱��^�� LM358 �Y(ji��)�ϷŴ��·�γɵ�������ģ�K����ϵ �y(t��ng)�Y(ji��)��(g��u)��D������ʾ��
�����������^�c�x�� 3.1 ̎���� �D 2.1 ϵ�y(t��ng)�Y(ji��)��(g��u)��D
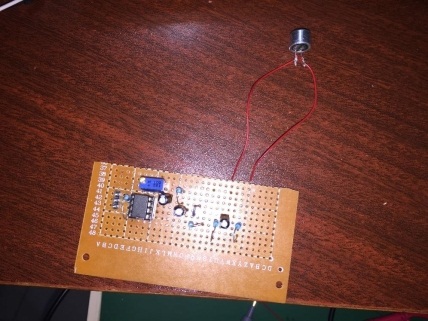
����һ������ TI ��˾���a(ch��n)�� MSP430 ��Ƭ�C(j��)��MSP430 ϵ�І�Ƭ�C(j��)����һ�N �����١����ĵ�ͬ�r(sh��)���о���(ji��n)ָ���RISC���� 16 λ̎������ԓϵ��оƬƬ��(n��i) �YԴ�S�����Д�Դ�Ĕ�(sh��)���^�࣬���ԝM�㱾���O(sh��)Ӌ(j��)��(du��)�Д�Դ������ͬ�r(sh��) MSP430 ϵ�І�Ƭ�C(j��)�\(y��n)���ٶȿ죬Ƭ��(n��i)Ӳ���YԴ�S�����܉�?q��)��F(xi��n)һЩ�^���(f��)�s���㷨�͔�(sh��) ��(j��)̎�������ڶ̕r(sh��)�g��(n��i)���� MSP430 �ľ����c�_�l(f��)����һ�����y�ȡ� ������������ STC ��˾���a(ch��n)�� STC89C52RC ��Ƭ�C(j��)��STC89C52RC �� STC ��˾ ���a(ch��n)��һ�N������ CMOS�����ĵ� 8 λ����������Ƭ��(n��i)�����傀(g��)�������Д� Դ��������(du��)���M(j��n)�о���̎�����������ԝM�㱾���O(sh��)Ӌ(j��)Ҫ������ STC89C52RC ��Ƭ�C(j��)Сϵ�y(t��ng)�ĺ����^�麆(ji��n)�Σ������{(di��o)ԇ����Ҳ���ӷ��㡣 �C������������һ�ɱ��^�ߣ����ҿ��]���̕r(sh��)�g��(n��i)�������գ���(j��ng)�^(gu��)ӑՓ��ȡ���� ���� 3.2 Դ�b�� ����һ�����Æ�Ƭ�C(j��)�a(ch��n)������̖(h��o)����(j��ng)�^(gu��)���ʷŴ��·���(q��)��(d��ng)�o(w��)Դ���Q���l(f��) ���@����ͨ�^(gu��)����?q��)��F(xi��n)�������� STC89C52RC ��Ƭ�C(j��)Ƭ��(n��i)�YԴ���ޣ���Ҫ���� �ٺ���һ��(g��)��Ƭ�C(j��)Сϵ�y(t��ng)���^�����M(f��i)�YԴ�� ������������ 555 �η�(w��n)�B(t��i)��ʎ�·�a(ch��n)������̖(h��o)����(j��ng)�^(gu��)���O�ܷŴ��·���(q��) ��(d��ng)�o(w��)Դ���Q���l(f��)����ͨ�^(gu��)��(n��i)���Ķ��r(sh��)���a(ch��n)���r(sh��)���·���ⲿֻ�躆(ji��n)�ε��(q��)��(d��ng)� ·��Ɍ�(sh��)�F(xi��n)���Iһ�Σ������m(x��)�r(sh��)�g 1s �Ĺ��ܡ�ԓ�·�Y(ji��)��(g��u)��(ji��n)�Σ������ 5V � Դ�����㺸���c�y(c��)ԇ�� �C����������(j��ng)ӑՓ��ȡ��������
3.3 �������b�� ����һ�����É��ʽ������������ʽ������������É�늾��w�ĉ�� Ч��(y��ng)�Ƴ�һ�N�܌�(sh��)�F(xi��n)-��D(zhu��n)�Q���������������������dz����������r(ji��)���^ �F�� ���������������ʽ�v�O�wԒͲ�����^����ԓԪ���܌�һ�������̖(h��o)�D(zhu��n)���� ���̖(h��o)���r(ji��)����ˣ������O(sh��)Ӌ(j��)��֮���������O(sh��)Ӌ(j��)�V���c�Ŵ��·��һ��(g��u)���� ��̖(h��o)����ģ�K�� �C�����������ʽ�v�O�wԒͲ��(du��)�ڝM���O(sh��)Ӌ(j��)Ҫ��b�b���࣬��(j��ng)�^(gu��)ӑՓ��ȡ�� ������ 3.4 ����̖(h��o)�Ŵ��· ����һ���������_�P(gu��n)�����_�P(gu��n)ʹ�ú�(ji��n)�Σ��r(ji��)����ˣ����Ƿ���(y��ng)�����`���� �����^�͡� �����������ö༉(j��)�Ŵ������·�������յ���̖(h��o)��(j��ng)�ŴV����늉����^�� �����ɔ_�����ȸߡ� �C���������mȻ�������·��(f��)�s�\(y��n)��ģ�֪�R(sh��)�������(xi��ng)ĿҪ�ȱ��^�ߣ� ���Բ��÷�������3.5 �@ʾģ�K ����һ��LCD1602 Һ���@ʾ������һ�N���I(y��)�ַ���Һ�����܉�ͬ�r(sh��)�@ʾ 16x02 ��16 �� 2 �У��� 32 ��(g��)�ַ�����(du��)�ڱ����O(sh��)Ӌ(j��)���ԣ��mȻ���ܻ�������@ʾ����(bi��o)�S �� X �c Y ��ֵ�������]���{(di��o)ԇ�^(gu��)���У���Ҫ�@ʾ�r(sh��)�g��ֵ�����Д��|�l(f��)�a(ch��n)���Ę�(bi��o) ־ֵ��LCD1602 �@Ȼ��������(sh��)�r(sh��)�@ʾ���������{(di��o)ԇ���y�ȡ� ��������LCD12864 Һ���@ʾ������һ�N���ж�N�ӿڷ�ʽ����(n��i)����(ji��n)�w������ ��(k��)���c(di��n)ꇈD��Һ���@ʾģ�K�����@ʾ�ֱ��ʞ� 128��64, ��(n��i)�� 8192 ��(g��) 16*16 �c(di��n) �h�֣��� 128 ��(g��) 16*8 �c(di��n) ASCII �ַ���������ԓģ�K�`��Ľӿڷ�ʽ�ͺ�(ji��n)�Ρ��� ��IJ���ָ���ȫ�M�㱾���O(sh��)Ӌ(j��)�е��@ʾ������{(di��o)ԇ���� �C����������(j��ng)ӑՓ��ȡ�������� �ġ��·�O(sh��)Ӌ(j��) 4.1 ���I�l(f��)ģ�K�·�O(sh��)Ӌ(j��) ����̖(h��o)��ͨ�^(gu��) 555 �η�(w��n)�B(t��i)��ʎ�·�a(ch��n)����ͨ�^(gu��)�����_�P(gu��n)���o���½����| �l(f��)��555 �·�a(ch��n)�����m(x��)�r(sh��)�g�� 1s ������̖(h��o)��ʹ���O���·͌�(d��o)ͨ���Ŵ�� �����(q��)��(d��ng)�o(w��)Դ���Q���l(f��)������(g��)�·�� 5V �~��늳ع�늣�ʹ��С�������O�� A42 �M(j��n)�зŴ�������Ԍ�(sh��)�F(xi��n)���ġ�  ���I�l(f��)ģ�K�ľ��w�·���D��ʾ��
�D 4.1 ���I�l(f��)ģ�K�·
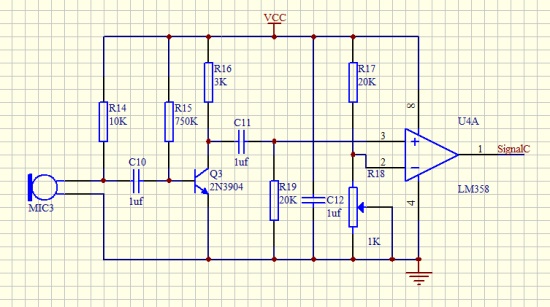
�D�й��Ѓɂ�(g��) 555 �η�(w��n)�B(t��i)��ʎ�·�����е�һ��(g��) 555 �η�(w��n)�B(t��i)��ʎ�·��(du��)���I�� �r(sh��)�������a(ch��n)����(zh��n)�_��ؓ(f��)�}�_���ڶ���(g��) 555 �η�(w��n)�B(t��i)��ʎ�·�Єt�a(ch��n)�����m(x��) 1s ���� �}�_����Ҋ 555 �η�(w��n)�B(t��i)��ʎ�·�У�ÿ��(l��i)һ��ؓ(f��)�}�_����ݔ��һ��(g��)���}�_���䌒 �� Tw �� RC �Q�����M�����й�ʽ�� Tw = 1.1 �� RC (s) ���� R �ڈD 4.1 �зքe�� R22��R28��C �քe�� C17��C18��ͨ�^(gu��)�{(di��o)��(ji��) R28 �� �ɮa(ch��n)�����m(x��) 1s �ĸ��ƽ��̖(h��o)�� 4.2 ������ģ�K�·�O(sh��)Ӌ(j��) ������ģ�K�����v�O�wԒͲ������D(zhu��n)�QԪ�����v�O�wԒͲݔ�����ǃ�(n��i)�� ��(ch��ng)Ч��(y��ng)�ܵ�©�O D ��Դ�O S�����·����Դ�Oݔ����©�O�ӵص��B�ӷ�ʽ������ Դ�O S �c�Դ���O֮�g���� 10K ��衣ͨ�^(gu��)�����O�Ŵ��·�Ŵ������̖(h��o)���ٽ�(j��ng) �^(gu��)�� LM358 �M�ɵ��^(gu��)����^���·ݔ��������̖(h��o)���·���O(sh��)���� 1K ���λ�� R18���Ա��{(di��o)��(ji��) LM358 ���^���˵ą���늉�����׃�·���`���ȣ�ʹ�{(di��o)ԇ���鷽 �㡣 ������ģ�K�·���w���D��ʾ�� �D 3.2 ������ģ�K�· �ɈD 3.2 ��֪�����^��ݔ��˅���늉���(sh��)�H�飺
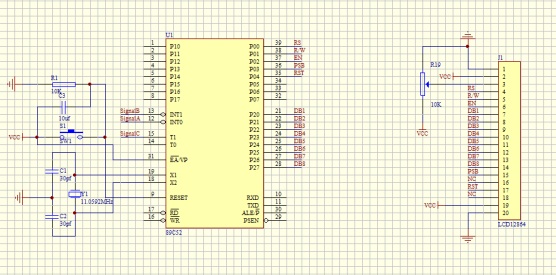
�����O(sh��)Ӌ(j��)���� STC89C52RC ��Ƭ�C(j��)�M(j��n)���\(y��n)��̎�����(q��)��(d��ng) LCD12864 Һ���@ʾ ���@ʾ��λ�Y(ji��)���������Æ�Ƭ�C(j��)��(n��i)�����r(sh��)�� 0 Ӌ(j��)�r(sh��)�����ⲿ�Д� 0���ⲿ�Д� 1 �Ͷ��r(sh��)�� 1 �|�l(f��)���z�y(c��)������̖(h��o)���½��أ�ͨ�^(gu��)�@�N��ʽӋ(j��)���������ͬ ģ�K���յ���̖(h��o)�ĕr(sh��)�g�ͨ�^(gu��)�r(sh��)�g��Ӌ(j��)���Դ��̖(h��o)������ģ�K���x��Ȼ���� ��Ƭ�C(j��)����Ӌ(j��)���Դ��λ������(bi��o)����K�@ʾ��Һ�����ϡ� STC89C52RC ��Ƭ�C(j��)Сϵ�y(t��ng)�·�� LCD12864 �(q��)��(d��ng)�·���D��ʾ��
�塢�㷨�c�����O(sh��)Ӌ(j��) 5.1 ��(sh��)��(j��)̎��ԭ���� �D 4.3 STC89C52RC ��Ƭ�C(j��)ģ�K
���㷨���ڕr(sh��)�g�����δ֪�c(di��n)������(bi��o)�c(di��n)������Փ�Ϸ�����ֻ������(g��)��֪�c(di��n)�� ���Ԍ�(du��)��Դ�M(j��n)�ж�λ���҂������Ȍ���(w��n)�}��(ji��n)������Sƽ���(n��i)��(du��)��Դ�M(j��n)�ж�λ�� ���D��ʾ����һ��(g��)ƽ���(n��i)�ֲ�������(g��)������ A��B �� C ����(bi��o)�քe�飨0,350���� ��0��0������500��0������(d��ng)ƽ���(n��i)ij̎ S(x,y)�l(f��)�����r(sh��)��3 ��(g��)���������Ⱥ���� ����̖(h��o)���O(sh��)��̖(h��o)���_(d��) A,B �ĕr(sh��)�g��� t1�����_(d��) B,C �ĕr(sh��)�g��� t2���t�У�
�҂�ֻ���چ�Ƭ�C(j��)�����Ќ� x, y ���п���ֵ�����뵽��ʽ�У��z������Щֵ�M ��l�����ɡ�
5.2 �������̈D �D 5.1 ����λϵ�y(t��ng)��Чƽ��D
�D 5.2
5.3 �ӳ������̈D��
�����y(c��)ԇ���� 6.1 ��Ҫ�Ĝy(c��)ԇ�x�����x�� �D 5.3
������Ҫʹ�õĜy(c��)ԇ�x���c�x���У�����(sh��)��̖(h��o)�l(f��)������ʾ�����c��(sh��)���f(w��n)�ñ��� 6.2 �y(c��)ԇ���� ��Ӳ���y(c��)ԇ�У����I�l(f��)ģ�Kͨ�^(gu��)ʾ�����y(c��)ԇ�·ݔ�����Σ��{(di��o)��(ji��)�λ���� ׃���ֵ��(l��i)�{(di��o)��(ji��)�|�l(f��)�r(sh��)�g�����C�l(f��)����푳��m(x��)�r(sh��)�g�� 1s������ʹ�Ô�(sh��)���f(w��n)�ñ� �y(c��)�����I�l(f��)ģ�K�Ĺ��ġ�������ģ�Kͨ�^(gu��)��(sh��)���f(w��n)�ñ����y(c��)����(d��ng)�l(f��)ģ�K��� ��ģ�K��ͬ���x�r(sh��)�����^��ݔ��늉���ֱ���{(di��o)��(ji��)�λ������׃���^���`����ʹݔ ��늉���Ҫ����x��(n��i)���ܵ���̖(h��o)�������½����|�l(f��)��Ƭ�C(j��)���ģ�K�ͽ���ģ�K ������ʹ�ú���(sh��)�l(f��)������ʾ������(l��i)�z�y(c��)�·���B���Ƿ������� ��ܛ���y(c��)ԇ�У��҂��Mܛ���{(di��o)ԇ������˼���Ƿ�ģ�K�{(di��o)ԇ���Ȍ�����֞��� ��(g��)����ģ�K���㷨ģ�K���@ʾģ�K���҂�?c��)ڷ։K�{(di��o)ԇ�r(sh��)��������(g��)ģ�K��ݔ�����@ ʾ����(l��i)�Ա����^���ģ�K�Ƿ����_���\(y��n)���@�N���������Ԍ�ܛ���ϵ��e(cu��)�`���_��
λ��ijһ��(g��)�h(hu��n)��(ji��)�����������{(di��o)ԇ��Ч�ʡ������Ǿ��w������ 1���������еĘ�(bi��o)־λ signalA,signalB,signalC ͨ�^(gu��) LCD ��Ļ�@ʾ����(l��i)���Է��� �^���Ƿ����Ђ��������յ�����̖(h��o)�� 2��������̖(h��o)�g�ĕr(sh��)�g��ͨ�^(gu��) LCD ��Ļ�@ʾ����(l��i)���Է����^������������ ��(y��ng)�ٶ��Լ�������̖(h��o)���Ⱥ�����Ƿ��c��(sh��)�Hһ�¡� 3���ڽ��������ǰ��������һƬ��Ƭ�C(j��)ģ�������l(f��)������̖(h��o)����ͨ�^(gu��)���� �O(sh��)�Õr(sh��)�g��ȅ���(sh��)�����ڙz���㷨�Ƿ����_�� �ߡ�ϵ�y(t��ng)�{(di��o)ԇ 7.1 ���I�l(f��)ģ�K �y(c��)ԇݔ�������ͨ�^(gu��)�y(c��)�����Q����(li��n)�� 1�������õ����ֵ�����ĈD�п�֪  �� 0.042A��
�D 7.1.1 �y(c��)ԇ���Q���ɶ�늉����ĈD�п�֪�� 4.36V��
7.2 ������ģ�K �D 7.1.2
��(d��ng)�ģ�K�x����ģ�K���x�^���r(sh��)������ģ�Kݔ��늉��_(d��)�� 3.6V ���ҡ�
�D 7.2.1 ��(d��ng)�ģ�K�x����ģ�K�^�h(yu��n)�r(sh��)��������(bi��o)�Ԍ�������(bi��o)���ķ�����������ģ�Kݔ�� 늉�����(hu��)׃С���@��(g��)�r(sh��)�����Ҫ�{(di��o)��(ji��)�λ������׃���ֵ�ԜpС���^�� LM358 ݔ ��˅���늉���ֵ��
7.3 LCD Һ���@ʾģ�K �D 7.2.1
�M(j��n)�Мy(c��)ԇ�r(sh��)��LCD12864 Һ���@ʾģ�K�����@ʾ����(bi��o) X �c Y ��ֵ�⣬߀��(hu��)�@ʾ A��B��C ����(g��)������ģ�K���Д��|�l(f��)��(bi��o)־ֵ�����D�@ʾ���е�һ�����@ʾ�� ��(n��i)�ݣ������@ʾֵ�� 0 ��ʾδ�|�l(f��)���� 1 �t��ʾ���|�l(f��)�����Լ� A��B �� C ����(g��) ������ģ�K�����յ���̖(h��o)�r(sh��)��Ӌ(j��)�r(sh��)�r(sh��)�̣����Џ��ҵ������Ξ� 0us,65us �� 68us�� �˕r(sh��)ģ�K C �����յ�����̖(h��o)�����@�ӷ���ϵ�y(t��ng)�{(di��o)ԇ�� �D����(bi��o) X �c Y ֵ���`�����(n��i)���M��y(c��)��Ҫ��
�ˡ���(sh��)��(j��)�y(c��)ԇ�c̎�� �D 7.3.1
8.1 �ģ�K����(sh��)ӛ䛱��c�y(c��)ԇ��(sh��)��(j��) ��(d��ng)�o�ģ�K��늕r(sh��)�ģ�K�y(c��)ԇ�Y(ji��)�����±���ʾ�� �y(c��)ԇ��(n��i)�� | �y(c��)ԇ�Y(ji��)�� | ���I�l(f��)�� | �� | ����̖(h��o)���m(x��)�r(sh��)�g | 1 .023s | ���Ĝy(c��)ԇ | 183.12mW(4.36V,0.042A) |
�� 8.1 8.2 ������ģ�Kݔ��늉�ӛ䛱��c�y(c��)ԇ��(sh��)��(j��) ���^�·�ڲ�ͬ�`�����£���Դ��ͬ���x�r(sh��)������ģ�Kݔ��늉��y(c��)ԇ�Y(ji��) �����±���ʾ��

51hei.png (5.16 KB, ���d��(sh��): 89)
���d����
2021-7-12 02:18 �ς�
�� 8.2
�ı� 8.2 ���Կ�������(d��ng)�λ����ֵ�^С�r(sh��)�����^��ݔ��˅���늉��ӽ� 0 �r(sh��)
�����յ���̖(h��o)������(sh��)�H���@����Ҳ�������ܵ��ɔ_������ģ�K C ���^�� A��B ģ
�K�ˣ����ں��ӹ�ˇ�Ć�(w��n)�}���`�����^�͡������{(di��o)��(ji��)�λ����ֵ֮������(g��)ģ�K
��K�����ܵ���̖(h��o)���M���O(sh��)Ӌ(j��)Ҫ��
8.3 Դ��(sh��)�y(c��)����(bi��o)ӛ䛱� ��(du��)̎�ڲ�ͬ����(bi��o)��Դ�M(j��n)���ˌ�(sh��)�H�y(c��)������K�õ������µ�һЩ��(sh��)�y(c��)��(sh��)��(j��)��
�±���ʾ��
51hei.png (3.5 KB, ���d��(sh��): 100)
���d����
2021-7-12 02:18 �ς�
�ı��п��Կ���������(g��)�e�c(di��n)�⣬����(bi��o)�����Ă�(g��)����߅���^(q��)���Լ����g�^(q��)��
ȡ�� 5 ��(g��)�c(di��n)���䌍(sh��)�y(c��)����(bi��o)�����M���O(sh��)Ӌ(j��)Ҫ����(g��)�e�c(di��n)���`����������ڽ���ģ �K���õ�λ�ò���(zh��n)�_��Դ���õز���(zh��n)�_���a(ch��n)����
�š����Y(ji��)
�����O(sh��)Ӌ(j��)�� STC89C52 ����IJ��������������z�y(c��)�c���R(sh��)���g(sh��),���Ç�(y��n)�ܵ� ��(sh��)�W(xu��)������(sh��)�F(xi��n)�ʹ_����Դ�Ĝ�(zh��n)�_��λ����ϵ�y(t��ng)�O(sh��)Ӌ(j��)�^(gu��)���У�����Ӳ���·��(ji��n)�Σ� ����Ӳ���ɱ�����(ji��)�s���ġ�
���@���O(sh��)Ӌ(j��)�У��҂��������S����(w��n)�}���@Щ��(w��n)�}�҂�֮ǰ��δ�����^(gu��)�� ����K�҂����ҵ��˽�Q�@Щ��(w��n)�}���k�����@��(du��)�҂���(l��i)�f(shu��)��һ�κܺõ�呟����� �����O(sh��)Ӌ(j��)�cܛ���{(di��o)ԇ���^(gu��)��֮�У������҂�ͬ�r(sh��)ʹ���� STC89C52 ��Ƭ�C(j��)�е��� ��(g��)�Д��M(j��n)�п���̎������(du��)�چ�Ƭ�C(j��)����(g��)�Д�ă�(y��u)�ȼ�(j��)�c�|�l(f��)�Ŀ��]�����(f��)�s���� ֻҪ�Y(ji��)�Ϻ���(sh��)��̖(h��o)�l(f��)����ģ�M����̖(h��o)�|�l(f��)��Ƭ�C(j��)�õ��{(di��o)ԇ�Y(ji��)�������Ҹ���(j��)�@Щ
�Y(ji��)��������������ܵõ��(y��u)�ij����O(sh��)Ӌ(j��)�������ڳ����O(sh��)Ӌ(j��)�^(gu��)�̣������ӳ� ���Д�(sh��)��(j��)̎��ʮ����Ҫ���҂�������S����Y�ϣ���(du��)�� C51 �еĔ�(sh��)��(j��)����Լ��� �õĎ�(k��)����(sh��)Ҳ���ӵ���Ϥ����Ӳ���{(di��o)ԇ�^(gu��)���У����F(xi��n)��������ģ�K�·����(w��n)���� ���ܵ��ɔ_���Լ��Ŵ��·�y���{(di��o)ԇ�Ć�(w��n)�}����(du��)�ڽ���(l��i)�O(sh��)Ӌ(j��)֮���҂�Ҳ ��(hu��)���]�����O(sh��)Ӌ(j��)���P(gu��n)�·����������p���^���·�M(j��n)�б��^�Ŵ�(l��i)����·�����ܡ�
�·ԭ��D
���P(gu��n)��Ʒ�DƬ ��1����Ʒ���w�D��
��2�����I�l(f��)ģ�K
��3��������ģ�K ��4����Ƭ�C(j��)Сϵ�y(t��ng)

��Ƭ�C(j��)Դ��������:
- #include<reg52.h>
- #include<stdio.h>
- #include "delay.h"
- #include "lcd.h"
- #include<math.h>
- #define uchar unsigned char
- #define uint unsigned int
- #define BOOL bit
- #define BYTE unsigned char
- #define WORD unsigned int
- uchar signalA,signalB,signalC;
- uchar wolsignalA,wolsignalB,wolsignalC;
- uchar wolCount,obv;
- unsigned int posX,posY; //����(bi��o)ȡֵ
- code unsigned char byValidShow[] = {" Vֵ: "};
- code unsigned char DispX[] = {" X�S: "};
- code unsigned char DispY[] = {" Y�S: "};
- void Init_Show() //LCD��ʼ���@ʾ�ӳ���
- {
- Delay400Ms();
- LCDInit();
- LCDClear();
- Delay5Ms();
- LCDClear();
- //DisplayListChar(0,1,byValidShow);
- DisplayListChar(0,2,DispX);
- DisplayListChar(0,3,DispY);
- Delay5Ms();
- }
- void Init_isr() //�Д��ʼ���O(sh��)���ӳ���
- {
- EA = 0;
- TMOD = 0x62;
- /*�ⲿ�Д�0*/
- IT0 = 1; EX0 = 1;
- /*�ⲿ�Д�1*/
- IT1 = 1; EX1 = 1;
- /* Ӌ(j��)��(sh��)�� 0*/
- TH1 = 0xFF; TL1 = 0xFF; TR1 = 1; ET1 = 1;
- /* ���r(sh��)�� 1*/
- TH0 = 246; TL0 = 246; TR0 = 0; ET0 = 0;
- /***********/
- IE0=0;IE1=0;TF1=0;TF0=0;
- EA = 1;
- }
- void signalchuli(float m,float n) //����(bi��o)��λӋ(j��)�����
- {
- BOOL r1=0;
- BOOL r2=0; //�����Ƿ����׃��
- BOOL suc=0; //���}�Ƿ�ɹ�׃��
- float x,y;
- for(x=10;x<=500;x+=10)
- {
- for(y=10;y<=350;y+=10)
- {
- if(fabs(sqrt(x*x+(350-y)*(350-y))- sqrt(x*x+y*y)-m)<=20.0)
- r1=1;
- //else r1=0;
- if(fabs(sqrt(x*x+y*y)-sqrt(y*y+(500-x)*(500-x)) -n)<=20.0)
- r2=1;
- //else r2=0;
- if(r1&&r2)
- {
- suc=1;
- break;
- }
- else
- {
- r1=0;
- r2=0;
- }
- }
- if(suc)
- break;
- }
-
- posX=x;
- posY=y;
-
- }
- void main()
- {
- float cha1,cha2;
- uchar cha1_temp,cha2_temp;
- EA=0;
- Init_Show();
- Init_isr();
- while(1)
- {
- if( signalA && signalB && signalC)
- {
- EA = 0;
- TR0=0;
- obv++;
- cha1_temp = wolsignalA - wolsignalB;
- cha2_temp = wolsignalB - wolsignalC;
- if(wolsignalA < wolsignalB)
- {
- cha1_temp = 65536 - cha1_temp;
- cha1 = -(3.4*cha1_temp);
- }
- else
- {
- cha1 = 3.4*cha1_temp;
- }
- if(wolsignalB < wolsignalC)
- {
- cha2_temp = 65536 - cha2_temp;
- cha2 = -(3.4*cha2_temp);
- }
- else
- {
- cha2 = 3.4*cha2_temp;
- }
- signalchuli(cha1,cha2);
- DisplayADData(4,2,posX);
- DisplayADData(4,3,posY); //�@ʾ����(bi��o)
- signalA = 0;
- signalB = 0;
- signalC = 0;
- wolCount = 0;
- Init_isr();
- }
- DisplayADData(0,4,wolsignalA);
- DisplayADData(3,4,wolsignalB);
- DisplayADData(6,4,wolsignalC); //�@ʾ�r(sh��)�g��ֵ�������{(di��o)ԇ
- DisplayADData(0,1,signalA);
- DisplayADData(3,1,signalB);
- DisplayADData(6,1,signalC); //�@ʾ�|�l(f��)��(bi��o)־λ�������{(di��o)ԇ
- }
- }
- void JsA_isr() interrupt 0 //�ⲿ�Д�0���½����|�l(f��)
- {
- EX0 = 0;
- if(wolCount == 0)
- {
- wolsignalA = 0;
- TR0 = 1;
- ET0 = 1;
- }
- else
- {
- wolsignalA = wolCount;
- }
- signalA = 1;
- }
- void JsB_isr() interrupt 2 //�ⲿ�Д�1���½����|�l(f��)
- {
-
- if(wolCount == 0)
- {
- wolsignalB = 0;
- TR0 = 1;
- ET0 = 1;
- }
- else
- {
- wolsignalB = wolCount;
- }
- signalB =1;
- EX1 = 0;
- }
- void Timer1_isr() interrupt 3 //Ӌ(j��)��(sh��)��1��������ʽ2
- {
- if(wolCount == 0)
- {
- wolsignalC = 0;
- TR0 = 1;
- ET0 = 1;
- }
- else
- {
- wolsignalC = wolCount;
- }
- signalC = 1;
- ET1 = 0;
- }
- void Timer0_isr() interrupt 1 //���r(sh��)��0��������ʽ2 , 10us
- {
- wolCount++;
- }
�����ęn�c�����Y��51hei���d(���W(xu��)��Ʒ,�����e(cu��)�`Ո(q��ng)��Ҷ��ָ��(d��o)):
 ����51������λϵ�y(t��ng).rar
(1.6 MB, ���d��(sh��): 177)
����51������λϵ�y(t��ng).rar
(1.6 MB, ���d��(sh��): 177)
2021-7-11 18:48 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5
| 



 [��(f��)��朽�]
[��(f��)��朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664










 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��