|
���죬�҂���Ҫ����һ��(g��)����Arduino�_�l(f��)����Ԅ�(d��ng)����ιʳ�C(j��)�������Լ��r(sh��)���Ԅ�(d��ng)����Č����ṩʳ�ԓ�(xi��ng)Ŀ����һ��(g��)DS3231��RTC����(sh��)�r(sh��)�r(sh��)犣�ģ�K�������O(sh��)�Ì�����Ҫιʳ�ĕr(sh��)�g�����ڡ���ˣ�����(j��)�������M(j��n)ʳ�ĕr(sh��)�̱����O(sh��)���(hu��)�Ԅ�(d��ng)���»����ʳ�
�ڱ��(xi��ng)Ŀ�У��҂�ʹ��һ��(g��)1602��LCDģ�K�@ʾ�r(sh��)�g��ͨ�^ʹ���B�ӵ�Arduino UNO��DS3231 RTCģ�K�@�á����⣬��߀ʹ��һ��(g��)�ŷ�늙C(j��)���D(zhu��n)�������ṩʳ�ͬ�r(sh��)߀�ṩһ��(g��)4 * 4�ľ���I�P���Á��ք�(d��ng)�O(sh��)��ιʳ����ĕr(sh��)�g�������Ը���(j��)����Ҫι�o�����ʳ�������O(sh��)�����D(zhu��n)�ǶȺ������_���r(sh��)�g��ʳ����Ҳ����������Č�����С����С؈߀���B�������в�ͬ�� 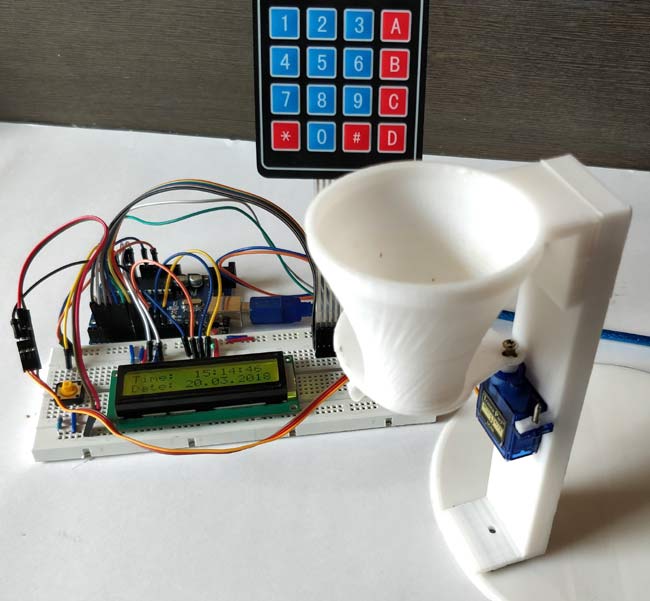
����IJ��� �� Arduino UNO�_�l(f��)�� �� 4 * 4�ľ���I�P �� LCD�@ʾģ�K1602 �� һ��(g��)���o �� �ŷ�늙C(j��) �� ��� �� �B�ӌ�(d��o)�� �� ����� �·ԭ��D ���@�����Arduino�Č���ιʳ�C(j��)���(xi��ng)Ŀ�У����˫@ȡ�r(sh��)�g�����ڣ��҂�ʹ����RTC����(sh��)�r(sh��)�r(sh��)犣�ģ�K���҂�ʹ��4 * 4����I�P�Լ�LCDģ�K1602�ք�(d��ng)�O(sh��)�Ì����ιʳ�r(sh��)�g���ŷ�늙C(j��)���D(zhu��n)�����������Ñ��O(sh��)���ĕr(sh��)�g����ʳ� LCD�����@ʾ���ں͕r(sh��)�g�� 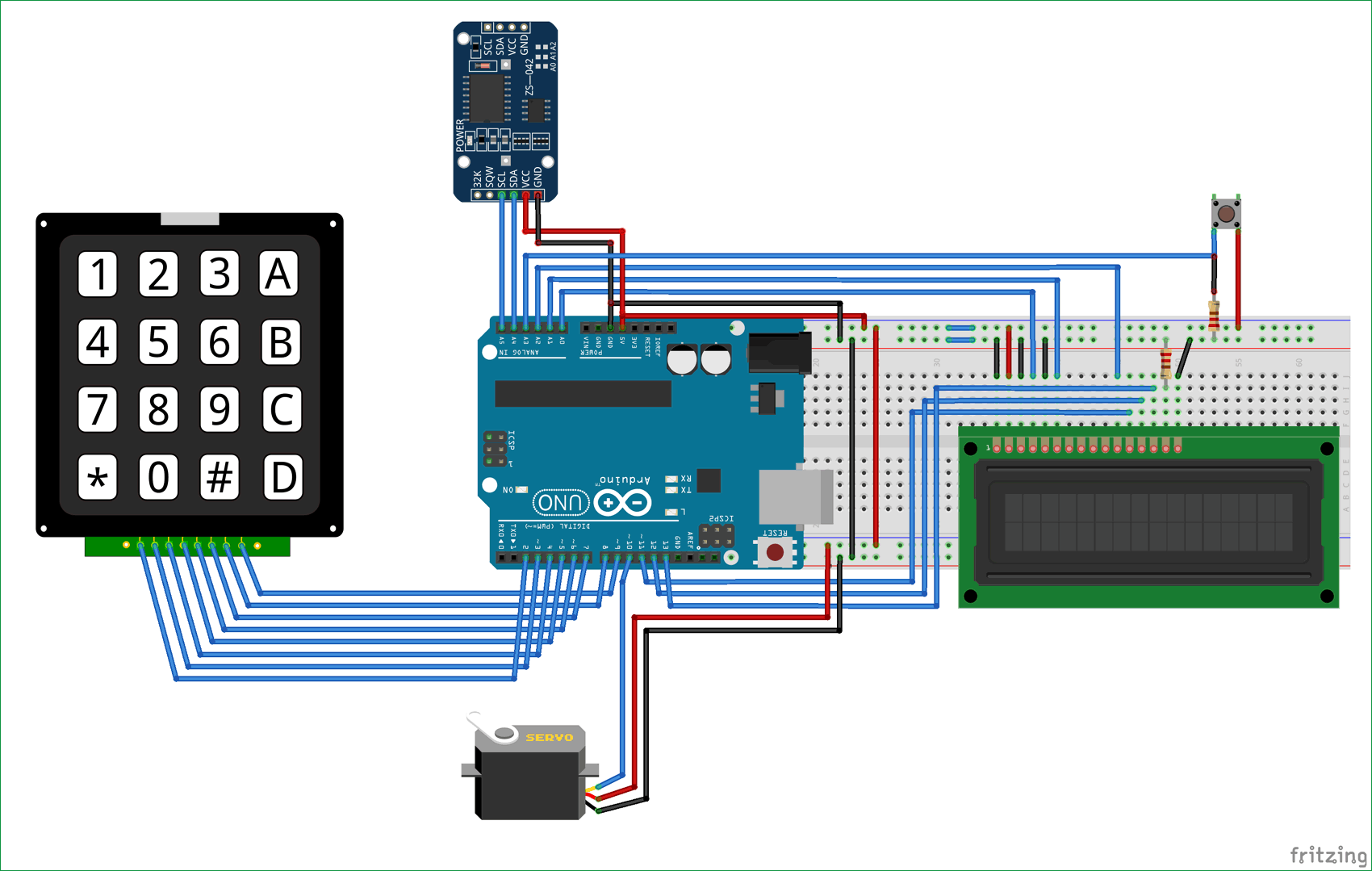
ʹ��3D��ӡ�Č���ιʳ�C(j��)ģ�� �҂�ʹ��3D��ӡ�C(j��)�O(sh��)Ӌ(j��)���@��A(y��)rduino����ιʳ�C(j��)����������Ҳ����ͨ�^���@�����d�ļ�����ӡ��ͬ���O(sh��)Ӌ(j��)�����ڴ�ӡ��ģ�͵IJ�����PLA���������Ă�(g��)���֣����D��ʾ�� 
�����D��ʾ�M�b�Ă�(g��)�������B���ŷ�늙C(j��)�� 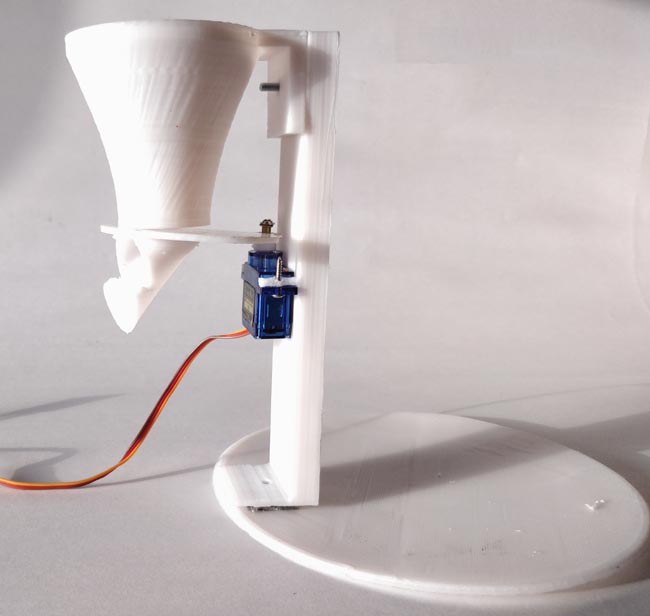
DS3231 RTCģ�K��(ji��n)�� DS3231��һ��(g��)RTC����(sh��)�r(sh��)�r(sh��)犣�ģ�K���ڴ����(sh��)����(xi��ng)Ŀ�У������ڱ������ں͕r(sh��)�g��ԓģ�K�Ԏ��˼~��늳أ���ʹ���Դ���Ƴ���MCUӲ����(f��)λ��Ҳ��ʹ��ԓ�~��늳��������ں͕r(sh��)�g������һ���҂�?c��)��@��(g��)ģ�K���O(sh��)�������ں͕r(sh��)�g������(hu��)һֱ������ȥ�����҂����·�У��҂�ʹ��DS3231����(j��)���������O(sh��)�õĕr(sh��)�g��ι��������[�һ�ӡ���(d��ng)�r(sh��)��_(d��)���O(sh��)���ĕr(sh��)�g�r(sh��)���������ŷ�늙C(j��)���_�����T��ʳ�����댙��ʳ�����С� 
ע�⣺�״�ʹ�ô�ģ�K�r(sh��)��������O(sh��)�����ں͕r(sh��)�g��
���a���f�� �Ԅ�(d��ng)����ιʳ�C(j��)��������Arduino���a�ڱ��µ�ĩβ�o���� Arduino��ʹ���ŷ�늙C(j��)��LCDģ�K1602��Ĭ�J(r��n)�Ď�(k��)�ļ������nj�(du��)��Arduinoʹ��RTCģ�KDS3231 ��4 * 4����I�P����������d�����b�@Щ��(k��)���@�ɂ�(g��)��(k��)�����d朽����£� �� DS3231 RTC����(sh��)�r(sh��)�r(sh��)犣�ģ�K��(k��) �� 4 * 4����I�P��(k��)
������Ĵ��a�У��҂����x�ˎ�(k��)����#include <DS3231.h>������RTCģ�K����#include <Servo.h>�������ŷ�늙C(j��)����#include <LiquidCrystal.h>������16 * 2 LCD ���Լ���#include <Keypad.h>������4 * 4����I�P�� - #include <DS3231.h>
- #include <Servo.h>
- #include <LiquidCrystal.h>
- #include <Keypad.h>
[color=rgb(51, 102, 153) !important]��(f��)�ƴ��a
������Ĵ��a�У��҂����x��4 * 4����I�P���I�Pӳ�䣬�����I�P���к��з�����Arduino���_�� - char keys[ROWS][COLS] = {
- {'1','2','3','A'},
- {'4','5','6','B'},
- {'7','8','9','C'},
- {'*','0','#','D'}
- };
- byte rowPins[ROWS] = { 2, 3, 4, 5 };
- byte colPins[COLS] = { 6, 7, 8, 9 };
[color=rgb(51, 102, 153) !important]��(f��)�ƴ��a
���@��҂�ͨ�^�ڴ��a��ʹ�����������턓(chu��ng)���I�P�� - Keypad kpd = Keypad( makeKeymap(keys), rowPins, colPins, ROWS, COLS );
[color=rgb(51, 102, 153) !important]��(f��)�ƴ��a
�҂�����Arduino�_�l(f��)���A4��A5�B��DS3231��SCL��SDA���_�����⣬�����_����oLCD����ʼ���ŷ�늙C(j��)�� - DS3231 rtc(A4, A5);
- Servo servo_test; //initialize a servo object for the connected servo
- LiquidCrystal lcd(A0, A1, A2, 11, 12, 13); // Creates an LC object. Parameters: (rs, enable, d4, d5, d6, d7)
[color=rgb(51, 102, 153) !important]��(f��)�ƴ��a
������Ĵ��a�У��҂�����t1��t6��key�͔�(sh��)�Mr[6]�Լ�feed�� - int t1, t2, t3, t4, t5, t6;
- boolean feed = true;
- char key;
- int r[6];
[color=rgb(51, 102, 153) !important]��(f��)�ƴ��a
������Ĵ��a�У��҂�?c��)O(sh��)�������нM�����ڳ�ʼ�����������磬�ڴ��a��servo_test.attach(10);���У����ŷ�늙C(j��)�B�ӵ�Arduino�ĵ�10��(g��)���_����A0��A1��A2���x��ݔ�����_��Ȼ���ʼ��LCD��RTCģ�K�� - void setup()
- {
- servo_test.attach(10); // attach the signal pin of servo to pin9 of arduino
- rtc.begin();
- lcd.begin(16,2);
- servo_test.write(55);
- Serial.begin(9600);
- pinMode(A0, OUTPUT);
- pinMode(A1, OUTPUT);
- pinMode(A2, OUTPUT);
- }
[color=rgb(51, 102, 153) !important]��(f��)�ƴ��a
�F(xi��n)�ڣ��������Ҫ������loop����(sh��)����ι����ġ��oՓ�Εr(sh��)���°��o��������(hu��)׃?y��u)�㶨ƽ��Ҳ���?������ͨ�^��buttonPress = digitalRead(A3)���ķ�ʽ���xȡ���F(xi��n)�����M(j��n)��'if'�Z�䲢�{(di��o)��'setFeedingTime'����(sh��)��Ȼ����^��(sh��)�r(sh��)�r(sh��)�g���Ñ�ݔ��ĕr(sh��)�g������l�����棬����(sh��)�r(sh��)�r(sh��)�g��ݔ��r(sh��)�g��ͬ���t�ŷ�늙C(j��)���D(zhu��n)��100�ȣ�����0.4�����t�����ʼλ�á� - void loop() {
- lcd.setCursor(0,0);
- int buttonPress;
- buttonPress = digitalRead(A3);
- if (buttonPress==1)
- setFeedingTime();
- lcd.print("Time: ");
- String t = "";
- t = rtc.getTimeStr();
- t1 = t.charAt(0)-48;
- t2 = t.charAt(1)-48;
- t3 = t.charAt(3)-48;
- t4 = t.charAt(4)-48;
- t5 = t.charAt(6)-48;
- t6 = t.charAt(7)-48;
- lcd.print(rtc.getTimeStr());
- lcd.setCursor(0,1);
- lcd.print("Date: ");
- lcd.print(rtc.getDateStr());
- if (t1==r[0] && t2==r[1] && t3==r[2] && t4==r[3]&& t5<1 && t6<3 && feed==true)
- {
- servo_test.write(100); //command to rotate the servo to the specified angle
- delay(400);
- servo_test.write(55);
- feed=false;
- }
- }
[color=rgb(51, 102, 153) !important]��(f��)�ƴ��a
��void setFeedingTime()����(sh��)���a�У����°��o���҂�����ݔ�댙���ιʳ�r(sh��)�g��Ȼ���҂���횰�'D'������r(sh��)�g����(d��ng)����ĕr(sh��)�g�c��(sh��)�r(sh��)�r(sh��)�gƥ��r(sh��)���ŷ��_ʼ���D(zhu��n)�� - void setFeedingTime()
- {
- feed = true;
- int i=0;
- lcd.clear();
- lcd.setCursor(0,0);
- lcd.print("Set feeding Time");
- lcd.clear();
- lcd.print("HH:MM");
- lcd.setCursor(0,1);
- while(1){
- key = kpd.getKey();
- char j;
- if(key!=NO_KEY){
- lcd.setCursor(j,1);
- lcd.print(key);
- r = key-48;
- i++;
- j++;
- if (j==2)
- {
- lcd.print(":"); j++;
- }
- delay(500);
- }
- if (key == 'D')
- {key=0; break; }
- }
- }
[color=rgb(51, 102, 153) !important]��(f��)�ƴ��a
�Ԅ�(d��ng)����ιʳ���Ĺ����^�� 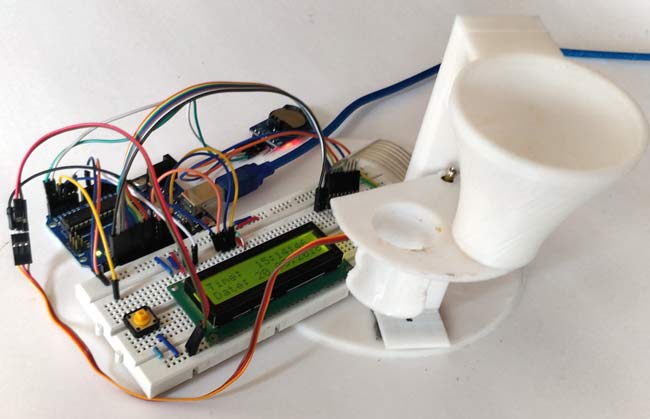
�����a�ς���Arduino Uno�_�l(f��)���LCDģ�K����(hu��)�@ʾ����(y��ng)�ĕr(sh��)�g�����ڡ���(d��ng)�����°��o�r(sh��)������(hu��)ԃ�������ιʳ�r(sh��)�g�������ʹ��4 * 4����I�Pݔ��r(sh��)�g���@ʾ�����@ʾݔ��ĕr(sh��)�g����'D'�I���Ա���ԓ�r(sh��)�g����(d��ng)��(sh��)�r(sh��)�r(sh��)�g��ݔ��r(sh��)�gһ�r(sh��)���ŷ�늙C(j��)�ij�ʼλ��55⁰���D(zhu��n)��100⁰���������t���ٴη��ص���ʼλ�á������ŷ��R�_(d��)�B�ӵ���ʳƷ�����T����ˮ�(d��ng)���Ƅ�(d��ng)�r(sh��)���T���_����һЩʳ���������P�С��ӕr(sh��)0.4����ŷ�늙C(j��)�ٴ����D(zhu��n)�����P(gu��n)�]�l�T������(g��)�^���ڎ���犃�(n��i)��ɡ��@�������Č����������ݔ��ĕr(sh��)�g�c(di��n)�Ԅ�(d��ng)�@ȡʳ��ķ�ʽ��
������(j��)ʳ��������׃�r(sh��)�g�����D(zhu��n)�Ƕȡ����������������(xi��ng)Ŀ�r(sh��)�������}���gӭ�ڴ��N���M(j��n)�л؏�(f��)
|





 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664





 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��