�@�������Ć��]�h(hu��n)�����{(di��o)��ϵ�y(t��ng)��(sh��)�(y��n)
�W(xu��)��(x��)����τ�(d��ng)�Ŀ��Կ���
һ����(sh��)�(y��n)?z��i)��?/font> ��1�����A(y��)��(x��)������������]�h(hu��n)������ֱ���{(di��o)��ϵ�y(t��ng)��ԭ�����M�ɼ�����Ҫ��Ԫ������ԭ���� ��2������Ɇ��]�h(hu��n)ֱ���{(di��o)���{(di��o)��ϵ�y(t��ng)�ĵĽ�ģ���棻 ��3�������Յ���(sh��)׃����(du��)ϵ�y(t��ng)���ܵ�Ӱ푣� ��4������ϤSimulink���沢��(y��ng)�����ϵ�y(t��ng)ģ���M(j��n)��ֱ���{(di��o)��ϵ�y(t��ng)�ķ��档 ������(sh��)�(y��n)Ҫ�� 1���_(k��i)�h(hu��n)ֱ���{(di��o)��ϵ�y(t��ng)���潨���_(k��i)�h(hu��n)ֱ���{(di��o)��ϵ�y(t��ng)�ķ���ģ�Ͳ��M(j��n)�з��棬�^�y(c��)���L��ֱ��늄�(d��ng)�C(j��)���D(zhu��n)���c늘��������(xi��n)�� 2���D(zhu��n)�ن��]�h(hu��n)ֱ���{(di��o)��ϵ�y(t��ng)���潨���o(w��)�o���D(zhu��n)��ؓ(f��)�������]�h(hu��n)ֱ���{(di��o)��ϵ�y(t��ng)ģ�Ͳ��M(j��n)�з��棬�^�y(c��)���L��ֱ��늄�(d��ng)�C(j��)���D(zhu��n)�١�늘��������(xi��n)����׃ؓ(f��)�d��С���^�y(c��)���L��ؓ(f��)�d��׃�r(sh��)��ֱ��늄�(d��ng)�C(j��)���D(zhu��n)�١�늘��������(xi��n)����׃ϵ�y(t��ng)���O(sh��)Ӌ(j��)����(sh��)�������ͷe��ϵ��(sh��)�����^�y(c��)����(sh��)׃����(du��)ϵ�y(t��ng)���ܵ�Ӱ푡���(du��)�����팍(sh��)�(y��n)����(du��)�c���팍(sh��)�(y��n)�Ќ�(sh��)�Hʹ�Å���(sh��)��r��ͬ�Ͳ�ͬ�r(sh��)�ķ���Y(ji��)���M(j��n)�Ќ�(du��)�ȷ����� ������(sh��)�(y��n)���E ��1�����M(j��n)��MATLAB���Γ�MATLAB����ڹ��ߙ��е�SIMULINK�D��(bi��o)����ֱ���I��SIMULINK������_(k��i)SIMULINKģ�K�g�[�����ڡ� ��2�������_(k��i)ģ�;����ڣ�ͨ�^(gu��)�Γ�SIMULINK���ߙ�����ģ�͵ĈD��(bi��o)���x��File��New��Model�ˆ��(xi��ng)��(sh��)�F(xi��n)�� ��3������(f��)�����P(gu��n)ģ�K������(j��)���O(sh��)Ӌ(j��)��ϵ�y(t��ng)���ҵ���Ҫ�����P(gu��n)ģ�K�������(bi��o)���I�x�У�����ģ�;����ڣ��p��ģ�K�D�����t���F(xi��n)�P(gu��n)��ԓ�D���Č�(du��)Ԓ(hu��)��ͨ�^(gu��)�Č�(du��)Ԓ(hu��)���(n��i)�݁�(l��i)�O(sh��)��ģ�K�ą���(sh��)�� ��4������ģ�K����(sh��)���p��ģ�K�D�����t���F(xi��n)�P(gu��n)��ԓ�D���Č�(du��)Ԓ(hu��)��ͨ�^(gu��)�Č�(du��)Ԓ(hu��)���(n��i)�݁�(l��i)�O(sh��)��ģ�K�ą���(sh��)�� ��5����ģ�K���B�ӣ������(bi��o)���I�c(di��n)�����c(di��n)ģ�Kݔ���ˣ��τ�(d��ng)���(bi��o)���K�c(di��n)ģ�Kݔ���̎���t�ڃ�ģ�K�g�a(ch��n)����������(xi��n)����(d��ng)һ��(g��)��̖(h��o)Ҫ���͵���ͬģ�K��ݔ��˕r(sh��)����Ҫ�L�Ʒ�֧��(xi��n)��ͨ���ɰ����(bi��o)�Ƶ������ķ�֧��(xi��n)�����c(di��n)̎���������(bi��o)�����I���������(bi��o)׃?y��u)�ʮ�ֺ��τ?d��ng)���(bi��o)ֱ����֧��(xi��n)�ĽK�c(di��n)̎��ጷ����(bi��o)���o��������˷�֧��(xi��n)���L�ơ� ������(y��ng)���O(sh��)Ӌ(j��)��(sh��)��(j��)������ģ�;����ڣ�����PI�{(di��o)��(ji��)����ֵ����(j��)�O(sh��)��ֵݔ�룬�磨Kp=15������(sh��)�H��(sh��)�(y��n)��(sh��)��(j��)������Ȼ�����(j��)ϵ�y(t��ng)ģ�K�D�B�Ӹ�ģ�K�� ��6��������ģ�͵��\(y��n)�У� 1.���慢��(sh��)���O(sh��)�ã������������^�y(c��)����Y(ji��)������Ҫ��(du��)ʾ�����@ʾ��ʽ��һ��(g��)�ģ���(du��)ʾ������Ĭ�J(r��n)ֵ��һ�Ą�(d��ng)���Ą�(d��ng)�ķ����ж�N������һ�N�������x��SIMULINKģ�ʹ��ڵ�Simulation��Configuration Parameters�ˆ��(xi��ng)�����_(k��i)������ƅ���(sh��)��(du��)Ԓ(hu��)��(du��)������ƅ���(sh��)�M(j��n)���O(sh��)�á� ���е�Start time��Stop time��Ŀ�քe���S�(xi��)�������ʼ�r(sh��)�g�ͽY(ji��)���r(sh��)�g���Y(ji��)���r(sh��)�g���Ը���(j��)��(sh��)�H��r�M(j��n)���ġ� 2.�����^(gu��)�̵Ć���(d��ng)��?ji��n)Γ?d��ng)���湤�ߗl�İ��o���x��Simulation��Start�ˆ��(xi��ng)���t�Ɇ���(d��ng)�����^(gu��)�̣����p��ʾ����ģ�K�Ϳ����@ʾ����Y(ji��)��������(d��ng)Scope���ߗl�еĵ�����(g��)���o�����h(yu��n)�R��[�Ԅ�(d��ng)�̶ȣ�Autosale��]������(hu��)ʹ��(d��ng)ǰ������̖(h��o)�������Сֵ��v����(bi��o)�������ޣ��Ķ��õ������ķ���Y(ji��)������(xi��n)�� (7)���{(di��o)��(ji��)������(sh��)���{(di��o)���������������ķ���ģ�ͣ���׃����ϵ��(sh��)�ͷe��ϵ��(sh��)�������p�����e�صõ���ʎ�����o��o(w��)�o����{(di��o)���(d��ng)��Ȳ�ͬ���ٶ�����(xi��n)������ѷe�ֲ���ȡ������׃����ϵ��(sh��)�����Եõ���ͬ�o���ʵ�푑�(y��ng)����(xi��n)ֱ����ʎ����(xi��n)�������׃PI�{(di��o)��(ji��)���ą���(sh��)�����Եõ��D(zhu��n)��푑�(y��ng)�ij��{(di��o)����һ�ӡ��{(di��o)��(ji��)�r(sh��)�gҲ��һ�ӵ�푑�(y��ng)����(xi��n)��ͨ�^(gu��)��(du��)�ȿ�������ϵ�y(t��ng)�ķ�(w��n)���ԺͿ�������һ��(du��)ì�ܣ���횸���(j��)���̵���Ҫ���x��һ��(g��)���m��PI����(sh��)����������SIMULINKܛ����ϵ�y(t��ng)�O(sh��)Ӌ(j��)�ṩ�ķ���ƽ�_(t��i)���x����m��PI����(sh��)���M(m��n)��ϵ�y(t��ng)������ָ��(bi��o)�� �ġ���(sh��)�(y��n)�Y(ji��)�� 1���_(k��i)�h(hu��n)�r(sh��)ϵ�y(t��ng)���D(zhu��n)�١��������(xi��n)
- ���]�h(hu��n)������ֱ���{(di��o)��ϵ�y(t��ng)���D(zhu��n)�١��������(xi��n)
3����׃ؓ(f��)�d��С�����]�h(hu��n)������ֱ���{(di��o)��ϵ�y(t��ng)���D(zhu��n)�١��������(xi��n)
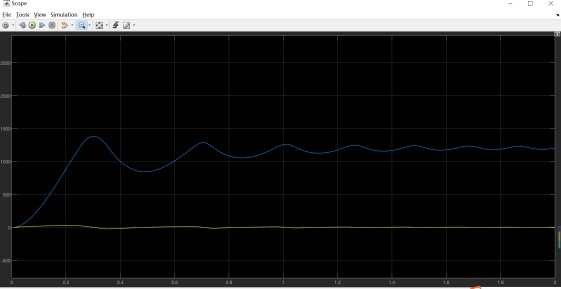
4����׃�����e���{(di��o)��(ji��)���ą���(sh��)���^�y(c��)����(sh��)��(du��)ϵ�y(t��ng)���ܵ�Ӱ� ����(sh��)�ij�10,-10 Ӱ푣�ϵ�y(t��ng)��ʎ�Δ�(sh��)���࣬�{(di��o)��(ji��)�r(sh��)�g���L(zh��ng)���p���˷�(w��n)�B(t��i)�`��
- ��(du��)�����팍(sh��)�(y��n)����(du��)�c���팍(sh��)�(y��n)�Ќ�(sh��)�Hʹ�Å���(sh��)��r��ͬ�Ͳ�ͬ�r(sh��)�ķ���Y(ji��)���M(j��n)�Ќ�(du��)�ȷ���
���뻯ģ�ͣ�ȥ�����ⲿ�����،�(du��)Ԫ����Ӱ푣���(du��)�ړp�ĵĿ��]��ȫ�棬�c��Փֵ����С�ą^(q��)�e��������(sh��)�`�Ǚz�(y��n)������Ψһ��(bi��o)��(zh��n)�����dz��J(r��n)����ĽY(ji��)�������Դ��M(j��n)�з�����ͨ�^(gu��)ģ�́�(l��i)���⌍(sh��)�H��r��
���ϵ�Word��ʽ�ęn51�����d��ַ��
 ���]�h(hu��n).docx
(203.72 KB, ���d��(sh��): 8)
���]�h(hu��n).docx
(203.72 KB, ���d��(sh��): 8)
2020-7-21 09:58 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5
| 




 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664








 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��