|
系統方案 本系統主要由STC89C52RC芯片組為核心、PCF8591模塊、液位傳感器模塊、Ph值傳感器模塊、6V電池組供電組成,下面分別論證這幾個模塊的選擇。 1、方案的論證與選擇方案一:由STC89C52RC芯片組為核心、PCF8591模塊、重力傳感器模塊、Ph值傳感器模塊、6V電池組供電組成, 方案二:由STC89C52RC芯片組為核心、PCF8591模塊、超聲破傳感器模塊、Ph值傳感器模塊、6V電池組供電組成, 方案三:由STC89C52RC芯片組為核心、PCF8591模塊、液位傳感器模塊、Ph值傳感器模塊、6V電池組供電組成, 分析方案一,使用重力傳感器,但重力傳感器不能在水庫,河流等復雜地區使用,只能用于實驗階段,所以放棄方案一。 分析方案二,使用超聲波傳感器,超聲波傳感器在水庫,河流等復雜地區不好固定,所以方案二也不考慮。 方案三使用液位傳感器模塊,方便參賽使用,最后選擇方案三。
(2)水位傳感器水位傳感器工作原理,用靜壓測量原理:當液位變送器投入到被測液體中某一深度時,傳感器迎液面受到的壓力公式為:Ρ = ρ .g.H + Po式中: P :變送器迎液面所受壓力 ρ:被測液體密度 g :當地重力加速度 Po :液面上大氣壓 H :變送器投入液體的深度 同時,通過導氣不銹鋼將液體的壓力引入到傳感器的正壓腔,再將液面上的大氣壓 Po 與傳感器的負壓腔相連,以抵消傳感器背面的 Po, 使傳感器測得壓力為:ρ .g.H ,顯然 , 通過測取壓力 P ,可以得到液位深度。 功能特點: 穩定性好,滿度、零位長期穩定性可達 0.1%FS/ 年。在補償溫度 0 ~ 70 ℃范圍內,溫度飄移低于 0.1%FS ,在整個允許工作溫度范圍內低于 0.3%FS 。 具有反向保護、限流保護電路,在安裝時正負極接反不會損壞變送器,異常時送器會自動限流在 35MA 以內。 固態結構,無可動部件,高可靠性,使用壽命長。 安裝方便、結構簡單、經濟耐用。 (3)Ph值測量Ph值傳感器工作原理,在傳感器內部的 pH 放大器是一個能通過數據采集器監測的有標準 pH 電極的電路。傳感器連接線的末端是一個BTA 插頭或一個 5-針的 DIN 插頭來與數據采集器連接。 在 pH 7 的緩沖溶液中,它將產生一個 1.75 伏特的電壓。pH 值每增加1,電壓增加0.25 伏。pH 值每減少1,電壓降低 0.25 伏。 這個凍膠填充的 pH 值傳感器的設計測量范圍為:0 到 14。它在玻璃感應電極頭延長出一個凍膠體,是初中、高中、大學中進行科學研究、環境測量的良好的設備。凍膠填充的參考半電化池是密封的,所以它無需重充。 2、水位高度的計算 由于本次使用的水位傳感器量程有限,故以容器150mm高度線做為0刻度線,水位傳感器檢測數據+150mm為最終結果,具體高度以12864液晶顯示屏顯示為準。 3、Ph值的計算 在 pH 7 的緩沖溶液中,它將產生一個 1.75 伏特的電壓。pH 值每增加1,電壓增加 0.25 伏。pH 值每減少1,電壓降低 0.25 伏。 4、供電電池組電壓的計算 本次電池組由4節干電池組成,電壓為6V,因部分元器件最高工作電壓為5V,故使用1K電阻對其進行分壓,使其最后輸出電壓降為5V。 三、電路與程序設計
1、電路的設計
(1)系統總體框圖系統總體框圖如圖所示 
系統總體框圖 (2)水位檢測子系統框圖1、水位檢測子系統框圖 
水位檢測子系統框圖 (3)PH檢測子系統框圖1、PH檢測子系統框圖 
PH檢測子系統框圖 2、程序的設計(1)程序功能描述與設計思路1、程序功能描述 根據題目要求軟件部分主要實現鍵盤的設置和顯示。 1)鍵盤實現功能:設置頻率值、頻段、電壓值以及設置輸出信號類型。 2)顯示部分:顯示電壓值、頻段、步進值、信號類型、頻率。 2、程序設計思路 (2)程序流程圖1、主程序流程圖 2、水位檢測子程序流程圖 
3、PH檢測子程序流程圖 
4、電壓檢測子程序流程圖 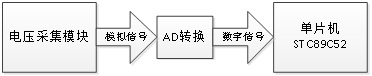
四、測試方案與測試結果1、測試方案(1)硬件測試 搭建基本框架,將各個模塊連接在STC89C52單片機上。 (2)軟件仿真測試 根據題目要求,用ISIS仿真軟件畫出原理圖,進行仿真。 (3)硬件軟件聯調 將總程序錄在STC89C52單片機芯片中,把所有需要的元器件都接在系統上,測試各部分功能。 2、測試條件與儀器測試條件:檢查多次,仿真電路和硬件電路必須與系統原理圖完全相同,并且檢查無誤,硬件電路保證無虛焊。 測試儀器:水位傳感器、PH傳感器、鋼尺、PH試紙、萬用表。 3、測試結果及分析(1)測試結果 經PH計和PH試紙、鋼尺、和萬用表檢測結果與水位、PH、電壓傳感器檢測結果的對比,誤差均沒有超過題目要求的最大允許誤差。
(2)測試分析與結論根據測試數據,可以得出以下結論: 1、加入液體后,在1分鐘內可以完成水位測量并顯示,誤差小于5mm。 3、電池組輸出電壓可以準確測量并顯示,誤差不大于0.01V。 綜上所述,本設計達到設計要求。
附錄1:電路原理圖

單片機源程序如下:
| 
 [復制鏈接]
[復制鏈接]





