- С܇�(q��)��(d��ng)�·�O(sh��)Ӌ(j��)�cPCB�D�L��
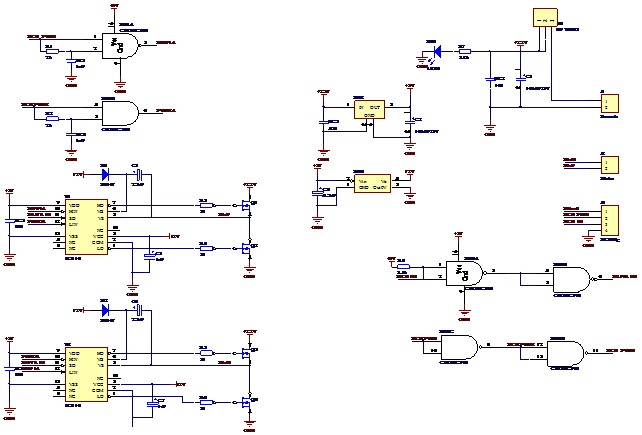
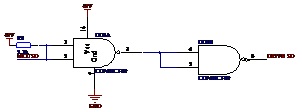
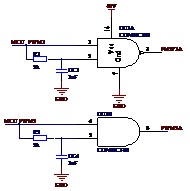
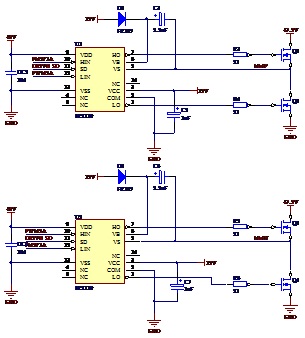
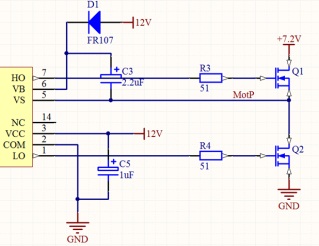
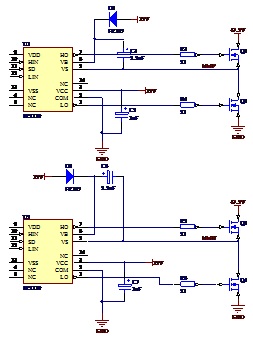
1.1С܇�(q��)��(d��ng)�·�Ĺ���������� �����O(sh��)Ӌ(j��)��Ҫ�����(q��)��(d��ng)С܇��ǰ�M(j��n)�����˹��ܡ��(q��)��(d��ng)�·��Ҫ����ֱ���Դģ�K�����i��̖(h��o)̎��ģ�K��PWM��̖(h��o)̎��ģ�K�����^(q��)���ɕr(sh��)�gģ�K��MOSFET�(q��)��(d��ng)ģ�K��H�����·ģ�K����(g��)ģ�K�M�ɡ�ֱ���Դģ�K��ָ��J1�����Դ�a(ch��n)���քe��7.2V��5V��12V���Դ�����i��̖(h��o)̎��ģ�K��ָݔ��MCU SD��̖(h��o)����(j��ng)�^(gu��)�ɂ�(g��)�c���Tݔ����ֵ��5V��ͬ��λSD��̖(h��o)��PWM��̖(h��o)̎��ģ�K��ָMCU PWM��̖(h��o)��(j��ng)�^(gu��)�ɂ�(g��)�c���T�քe�a(ch��n)����ֵ��5V��λ���a(b��)��MCU PWM1�cMCU PWM2��̖(h��o)�����^(q��)���ɕr(sh��)�gģ�K��ָ��RC�M�ɵij����·�cPWM��̖(h��o)�B���c�T���a(ch��n)���cԭ��̖(h��o)���tݔ��ĵ���λ�P(gu��n)ϵ��MOSFET�(q��)��(d��ng)ģ�K��Ҫ��PWM1A�cPWM2A��IR2110ݔ����̖(h��o)���(q��)��(d��ng)MOSFET��(d��o)ͨ�������H�����·ģ�K��Ҫ���Ă�(g��)MOSFET�M�ɣ���PWM1A����ƽ�r(sh��)Q1�cQ4��(d��o)ͨ��PWM2A����ƽ�r(sh��)Q2�cQ3��(d��o)ͨ�� 1.2�·ԭ��D�O(sh��)Ӌ(j��) 1.2�·ԭ��D���O(sh��)Ӌ(j��)�D
1.2.1ֱ���Դģ�K
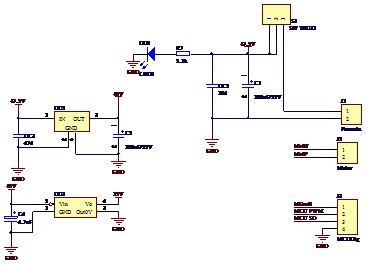
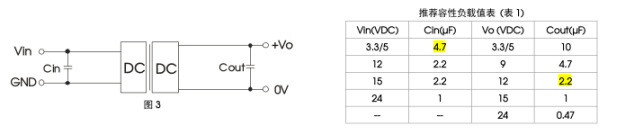
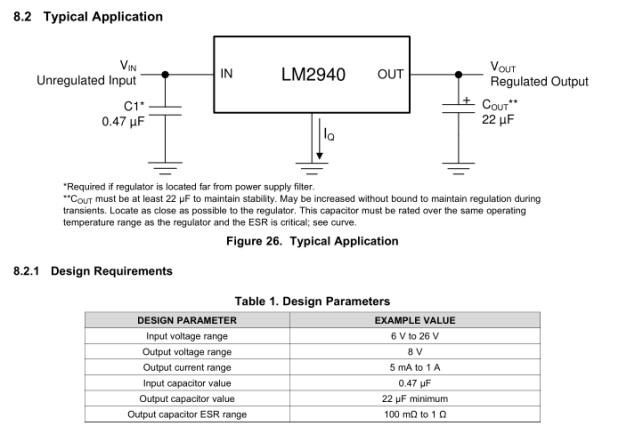
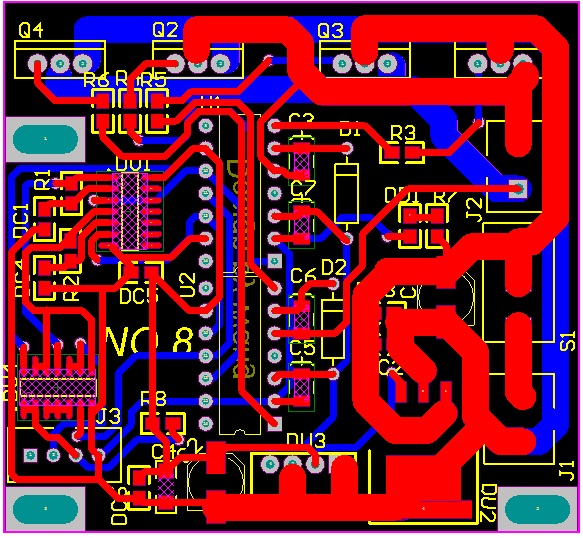
ֱ���Դģ�K��ָ��J1����ֱ���Դ��(j��ng)�^(gu��)���C1�cDC2�V����ݔ��7.2V�Դ����(j��ng)�^(gu��)���R7�Ͱl(f��)��LED�ӵأ��@ʾͨ��Ƿ�������7.2V�Դ��(j��ng)�V�����DC3����LM2940S-5.0оƬ�a(ch��n)��5V�Դ��5V�Դ��(j��ng)�^(gu��)C2��DC5��DC6��ݞV���oIR2110�(q��)��(d��ng)оƬ�cCD74HCT00߉оƬ��늣�5V��(j��ng)�^(gu��)C4��ݞV������BO512S_1WR2оƬ�a(ch��n)��12V늉���12V�Դ��(j��ng)�^(gu��)C5��C7�V�������e��ݳ�늼���IR2110�ṩVCC늉����ɈD���Y���@ʾ���Կ�������LM2940оƬ��ݔ��˲��ݞV����ݞ�0.47uF��ݔ������С��22uF�����@���҂��x��100uF����B_D-1WR2оƬ�У�ݔ��˲��ݞV����ݞ�4.7uF�� 1.2.2��̖(h��o)���i��̖(h��o)̎��ģ�K ��̖(h��o)���i��̖(h��o)̎��ģ�K��Ҫ�����Ć�Ƭ�C(j��)ݔ����MCU SD���i��̖(h��o)��ݔ�뵽CD74HCT00߉оƬ����(j��ng)�^(gu��)�ɂ�(g��)�c���T���a(ch��n)���cݔ����̖(h��o)�Π���ͬ����ֵ��5V��DRIVE SD��̖(h��o)����ֱ��ݔ�뵽IR2110�����Ƚ�(j��ng)�^(gu��)�c���T��ԭ���ǏĆ�Ƭ�C(j��)ݔ����PWM��̖(h��o)��ֵ��3.3V���������(q��)��(d��ng)IR2110��ͨ�^(gu��)�c���T������ֵ����늙C(j��)����^(gu��)���늙C(j��)�������\(y��n)�Еr(sh��)���Ɇ�Ƭ�C(j��)�l(f��)�����i̎����̖(h��o)��ͨ�^(gu��)IR2110оƬ�P(gu��n)�]PWM��̖(h��o)ݔ������ͣ늙C(j��)������p��늙C(j��)���·�� 1.2.3ݔ��PWM��̖(h��o)̎��ģ�K ݔ��PWM��̖(h��o)̎��ģ�K��Ҫ�����Ć�Ƭ�C(j��)ݔ����MCU PWM��̖(h��o)ݔ�뵽CD74HCT00߉оƬ�У���(j��ng)�^(gu��)һ��(g��)�c���T�a(ch��n)���cݔ����λ�෴��ֵ��5V��MCU PWM2��̖(h��o)���ٽ�(j��ng)�^(gu��)һ��(g��)�c���T�a(ch��n)��һ��(g��)�cݔ����̖(h��o)��λ��ͬ�ķ�ֵ��5V��MCU PWM1��̖(h��o)��ͨ�^(gu��)�c���T�a(ch��n)��PWM��̖(h��o)��ԭ��֮һ�a(ch��n)����λ���a(b��)�ă�·PWM��̖(h��o)��ԭ��֮���c���i��̖(h��o)̎��ģ�K��ƣ����ڏĆ�Ƭ�C(j��)ݔ����PWM��̖(h��o)��ֵ�H��3.3V���������(q��)��(d��ng)IR2110оƬ��ͨ�^(gu��)�c���T������ֵ�� 1.2.3���^(q��)���ɕr(sh��)�gģ�K ���^(q��)���ɕr(sh��)�gģ�K��Ҫ������CD74HCT08оƬ��(g��u)�ɣ���RC�M�ɵij����·�cPWM��̖(h��o)�B���c�T���a(ch��n)���cԭ��̖(h��o)���tݔ��ĵ���λ�P(gu��n)ϵ�����t�r(sh��)�g�������^(q��)�r(sh��)�g����ֹ�����ͬ�r(sh��)��(d��o)ͨ����(d��o)���Դ��·�� ���^(q��)�r(sh��)�gӋ(j��)�����£�  (1) (1) (2) ��֪���^(q��)�r(sh��)�gt��500-900ns��  �����փ�(c��)֪  ���Ӟ�978-1761.8�����փ�(c��)��֪CD74HCT08ݔ���������4mA��Ӌ(j��)��ɵ�R��С��1.25K����ȡR��2K������ Ӌ(j��)��ɵã�Cȡ1nF�����m���˕r(sh��)���^(q��)�r(sh��)�g��Ş�1000ns���ҡ� 1.2.4 MOSFET�(q��)��(d��ng)ģ�K MOSFET�(q��)��(d��ng)ģ�K��Ҫ����߉оƬCD74HCT08�a(ch��n)���ă�·��λ���a(b��)��PWM��̖(h��o)ݔ�뵽HIN���_�cLIN���_����IR2110��ݔ����̖(h��o)��CD74HCT00�a(ch��n)���ķ��i��̖(h��o)DRIVE SD����оƬIR2110�Ĺ�����B(t��i)������������B(t��i)�r(sh��)��HO�cLOݔ������(y��ng)PWM��̖(h��o)�(q��)��(d��ng)MOSFET�_(k��i)�P(gu��n)�����i��B(t��i)�r(sh��)��HO�cLO�o(w��)ݔ���� IR2110��Ҫ���_�������� Vb��Vs���ṩ�߉��˹�� HO���߉����(q��)��(d��ng)ݔ�� LO���͉����(q��)��(d��ng)ݔ�� VCC��COM���ṩ�͉��˹�� HIN��߉�߶�ݔ�� LIN��߉�Ͷ�ݔ�� IR2110����ԭ�����£� ��(d��ng)HIN����ƽ�r(sh��)��V1���_(k��i)ͨ��V2���P(gu��n)�࣬VC3�ӵ�Q1�ĖŘO��Դ�O֮�g��C3ͨ�^(gu��)V1��R3�͖ŘO��Դ�O�γɻ�·��늣��@�r(sh��)C3���ஔ(d��ng)��һ��(g��)늉�Դ���Ķ�ʹQ1��(d��o)ͨ������LIN�cHIN��һ��(du��)���a(b��)ݔ����̖(h��o)�����Դ˕r(sh��)LIN����ƽ��V3�P(gu��n)�࣬V4��(d��o)ͨ���@�r(sh��)�ۼ���Q2�ŘO��Դ�O��늺���оƬ��(n��i)��ͨ�^(gu��)R4Ѹ�ٌ�(du��)�ط�늣��������^(q��)�r(sh��)�gӰ�ʹQ2��Q1�_(k��i)֮ͨǰѸ���P(gu��n)�ࡣ ������(d��ng)HIN����ƽ�r(sh��)��V1�P(gu��n)�࣬V2��(d��o)ͨ���@�r(sh��)�ۼ���Q1�ŘO��Դ�O��늺���оƬ��(n��i)��ͨ�^(gu��)R1Ѹ�ٷ��ʹQ1�P(gu��n)�ࡣ��(j��ng)�^(gu��)�̕������^(q��)�r(sh��)�gLIN����ƽ��V3��(d��o)ͨ��V4�P(gu��n)��ʹVCC��(j��ng)�^(gu��)R4��S2�ĖŘO��Դ�O�γɻ�·��ʹQ2�_(k��i)ͨ���ڴ�ͬ�r(sh��)VCC��(j��ng)���e���O�ܣ�C3��Q2�γɻ�·����(du��)C1�M(j��n)�г�늣�Ѹ�ٞ�C1�a(b��)�����������ѭ�h(hu��n)����(f��)�� ���e���Ӌ(j��)�����£� ���e��ݱ�����ṩ������MOSFET�ܖŘO늺Ɍ�(d��o)ͨ�����늺ɣ������ڸ߶����_(k��i)�P(gu��n)�����_(k��i)ͨ���g������늉������̹��㹫ʽ���£� ���У����փ�(c��)֪  -MOSFET�T�O늺�nC��  -����Դ늉���12V��  -�°��MOSFET��(d��o)ͨ�ŘO늉����փ�(c��)֪��2.2V��  -  �c  ֮�g����С늉����փ�(c��)֪��7.5V��  -���e��֏�(f��)���O�ܵ�����܉�����1.3V�� ���딵(sh��)��(j��)�ã� �����ϣ��ٱ���һ����������ȡ��ֵ��2-3����  =500nF�� ���e���Ĺ��㣺 ���e���  ��(y��ng)�M�㣺 ��IR2110��(sh��)��(j��)�փ�(c��)t=10ns �����ϣ���ȡ����ֵ��2�����ң�  1.2.5 H�����·ģ�K H�����·ģ�K��Ҫ��4��(g��)MOSFET��(g��u)�ɣ��Դ늉���7.2V����оƬIR2110ݔ����PWM�����ƹ��ӌ�(d��o)ͨ�c�P(gu��n)�࣬Q1,Q4����PWM��̖(h��o)��ͬ��Q2,Q3����PWM��̖(h��o)��ͬ����·��̖(h��o)��λ���a(b��)�������]���^(q��)�r(sh��)�g���� 1.3 PCB�D�L�� (1)�½�һ��(g��)�ļ��A����(chu��ng)�����̣����湤�̡�����ԭ��D�ļ��cPCB�ļ��������ļ���Ŀ��(bi��o)�ļ��A�¡� (2)�L��ԭ��D����Ԫ����(k��)���ҵ�����(y��ng)Ԫ�����ò��B�ӣ�ģ�K�B�ӿ�ʹ�þW(w��ng)�j(lu��)��(bi��o)̖(h��o)���ڮ�ԭ��D�r(sh��)������](m��i)�е���������(j��)оƬ�f(shu��)���������O(sh��)Ӌ(j��)Ԫ����(k��)�ļ����Ƿ��b��(k��)�ļ�������Ԫ����ɷ��ã���(bi��o)��ԭ��ֵ���B�Ӻú������Ԅ�(d��ng)��(bi��o)̖(h��o)���܌�(du��)����ԭ���M(j��n)�И�(bi��o)̖(h��o)����(du��)����Ԫ����һ���ӷ��b�����_������ԭ��PCB���b���_���z��Ԫ��֮�g���Ƿ����_�B���Լ��Ƿ���̓�B������compile document ���ܙz�y(c��)�����e(cu��)�`�� ��3����PCB�D������PCB�ļ��������O(sh��)��ԭ�c(di��n)���O(sh��)��Ҏ(gu��)�t������30mil��Ȼ��ь��ГQ��Keep out layer��ԭ�c(di��n)��һ��(g��)�L(zh��ng)��2550mil����1800mil�ķ�����Ȼ��_��PCB�D��Ĵ�С�����L(zh��ng)�O(sh��)�Þ�2550mil,�匒�O(sh��)�Þ�3000mil����(du��)�L(zh��ng)���M(j��n)���m��(d��ng)�Ō��������M(j��n)�д�ף����ⲿ���γߴ��L(zh��ng)�O(sh��)�Þ�330mil�����O(sh��)�Þ�200mil����(n��i)���۵��L(zh��ng)���O(sh��)�Þ�290mil�������O(sh��)�Þ�130mil��Ȼ���M(j��n)���ք�(d��ng)���֣��ք�(d��ng)����һ�㰴���ȴ��С��ԭ�t�[�ţ�Ȼ�������܇���Ԫ���������܇���ͨ�^(gu��)���D(zhu��n)Ԫ��ʹԪ��֮�g�ľ���̡����ֺ�����ԭ�����_(k��i)ʼ�ք�(d��ng)�������c늄�(d��ng)�C(j��)ֱ�����B��MOTN�cMOTP���Լ�ֱ���cMOSFET���B��7.2V�cGND������Ҫ���^(gu��)������ı��ʹ��120mil�����������þ���30mil��������ȫ��������M(j��n)��DRC늚�z�飬�z�y(c��)�o(w��)�`��(du��)�������·�M(j��n)���_(k��i)����Ȼ��(du��)플Ӹ����M(j��n)�еؾW(w��ng)�j(lu��)���~�����_�����Ӵ�С��
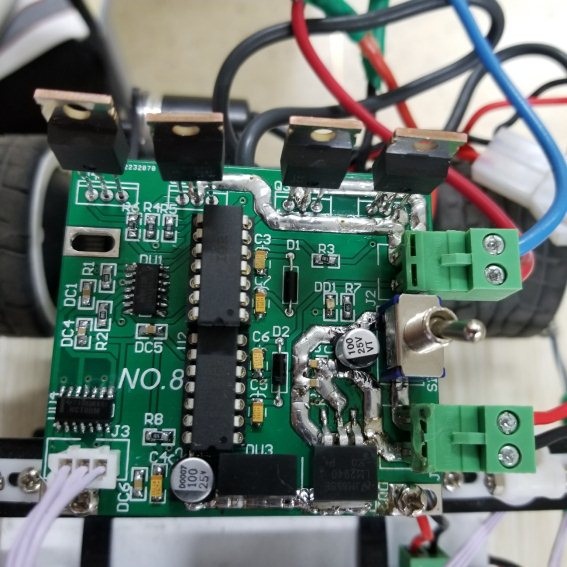
2.1�·��Ԫ������ �·�庸��Ҫ������С����ȵͺ�ߵ�����ں�������a�ĵط��r(sh��)��Ҫ���܇�����a�ں��Ӻ��a�M����һ�c(di��n)����̓�����ИO�Ե�Ԫ��һ��Ҫ�ȴ_���ØO�ԣ����M(j��n)�к��ӡ����F�^���մ�a����մ�����㣬�a�������¡����NоƬ���ĕr(sh��)��������ڸ����_�c(di��n)��һ���a��Ȼ��ѱ��NоƬ�������棬�����F�^���ΰ��������_ʹ�a�ڻ����c���_��ӡ�ע��һ��Ҫ�_��ÿһ��(g��)���_��������������̓����
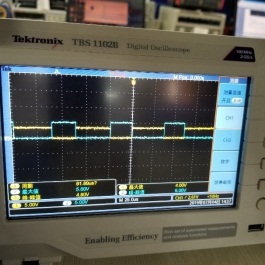
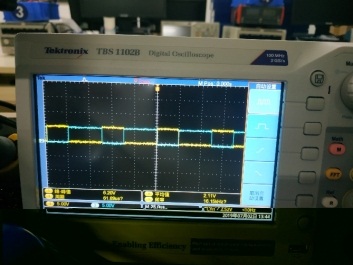
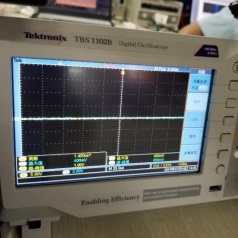
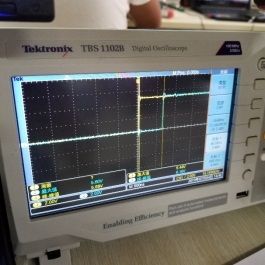
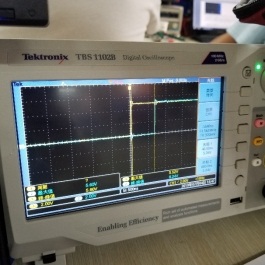
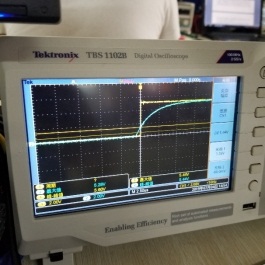
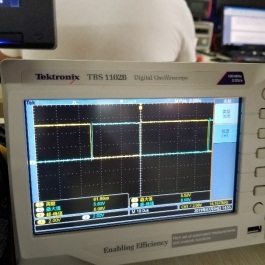
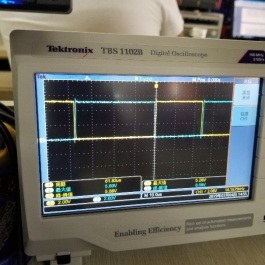
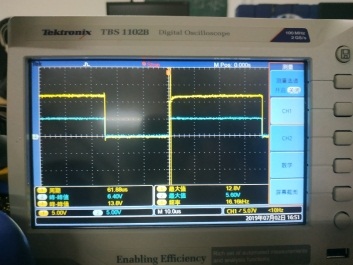
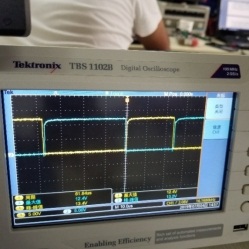
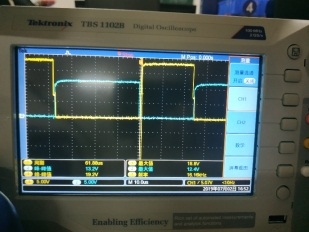
2.2�����{(di��o)ԇ 2.2.1ֱ���Դģ�K ���f(w��n)�ñ������n���_�J(r��n)�o���_(k��i)�P(gu��n)̎�ڔ��_(k��i)��B(t��i)����С܇늳��B�������(q��)��(d��ng)�·�塣���f(w��n)�ñ���ֱ��늉��n���_�J(r��n)�·��늳ؽӾ�����̎��늉���7.2V���ҘO�����_���܄�(d��ng)�o���_(k��i)�P(gu��n)��ͨ늣��l(f��)����O��������ʾ����Ch1���Μy(c��)LM2940S-5.0��1���_�c3���_���^���䲨�Σ�����ƽֱ���Σ�1���_늉�ֵ��7.2V���ң�3���_늉�ֵ��5V���ң��C��LM2940-5.0���������� ��Ch1���Μy(c��)B0512S-1WR2��2���_�c4���_���^���䲨�Σ�����ƽֱ���Σ�2���_늉�ֵ��5V���ң�4���_늉�ֵ��12V���ң��C��B0512S-1WR2���������� 2.2.2 PWM��̖(h��o)̎��ģ�K ��(l��i)�Ԇ�Ƭ�C(j��)��MCU PWMݔ����̖(h��o)��MCU SD���i��̖(h��o)ͨ�^(gu��)CD74HCT00оƬ���(q��)��(d��ng)�·�塣�Ć�Ƭ�C(j��)����ʹ����m(x��)ݔ���̶�ռ�ձȞ�60%��PWM��̖(h��o)�o�(q��)��(d��ng)�·�����d�����\(y��n)�С���Ch1�y(c��)оƬݔ��ˣ���U4A��9���_����Ch2���Μy(c��)��һ��(g��)�c���T��ݔ������U4A��8���_�����ڶ���(g��)�c���T��ݔ������U4A��11���_�����^�첨�Σ���(du��)�����õ�һ��(g��)�c���Tݔ��PWM��̖(h��o)�cݔ����̖(h��o)MCU_PWM֮�g����λ�෴��ֵ����5V���ڶ���(g��)�c���Tݔ��PWM��̖(h��o)�cݔ����̖(h��o)MCU_PWM֮�g����λ��ͬ�ҷ�ֵ��5V���C���c���T���������� ��Ch1�y(c��)��һ��(g��)�c���T��U4A��8���_����ݔ����Ch2�y(c��)�ڶ���(g��)�c���T��U4A��11���_����ݔ�����^���·�黥�a(b��)��PWM������̖(h��o)����ֵ��5V�� 2.2.3���i��̖(h��o)̎���Ԫ ��(l��i)�Ԇ�Ƭ�C(j��)��MCU SDݔ����̖(h��o)��MCU SD���i��̖(h��o)ͨ�^(gu��)CD74HCT00оƬ���(q��)��(d��ng)�·�塣�Ć�Ƭ�C(j��)����ʹ����m(x��)ݔ���̶�ռ�ձȞ�60%��PWM��̖(h��o)�o�(q��)��(d��ng)�·�����d�����\(y��n)�С���Ch1�y(c��)оƬݔ��ˣ���U4A��1���_����Ch2�y(c��)�ڶ���(g��)�c���T��ݔ������U4A��6���_�����^�첨�Σ���(du��)������SD��̖(h��o)�cݔ����̖(h��o)MCU SD֮�g��λ��ͬ�� 2.2.4���^(q��)���ɕr(sh��)�gģ�K ���^(q��)���ɕr(sh��)�gģ�K��Ҫ��CD74HCT08оƬ��(g��u)�ɣ���RC�M�ɵij����·�cPWM��̖(h��o)�B���c�T����Ch1�y(c��)�c�Tݔ��ˣ���U1A��1���_����PWM��̖(h��o)��Ch2�y(c��)�c�Tݔ���ˣ���U1A��3���_������̖(h��o)���y(c��)��?j��)ɂ�(g��)��̖(h��o)������֮�g�ĕr(sh��)�g������^(q��)�r(sh��)�g�������^(q��)�r(sh��)�g��640ns���M��500��900��������(du��)��һ·PWM��̖(h��o)���؏�(f��)�������������^(q��)�r(sh��)�g��620ns���M��Ҫ�� ��Ch1�y(c��)�c�Tݔ���ˣ���U1A��3���_����PWM��̖(h��o)��Ch2�y(c��)�c�T�B��RC��ݔ�����̖(h��o)����U1A��1���_������ԓ���Σ��_��ʹ���c�Tݔ���ƽ���D(zhu��n)늉�ֵ��1.4V�����O(sh��)Ӌ(j��)�D��֪���ڷ��D(zhu��n)늉���2V�r(sh��)���^(q��)�r(sh��)�g��1000ns���ң����ڌ�(sh��)�H���D(zhu��n)늉���1.4V��������^(q��)�r(sh��)�g���O(sh��)Ӌ(j��)��Ҫ�̣���640ns����Ch1�y(c��)��һ��(g��)�c�T��ݔ������U1A��3���_����Ch2�y(c��)�ڶ���(g��)�c�T����U1A��6���_����ݔ���^���䲨����λ���a(b��)�������]��ȥ�r(sh��)�g����ֵ��5V���ҡ����Կ����������g���g϶���������^(q��)�r(sh��)�g�� 2.2.5 MOSFET�(q��)��(d��ng)ģ�K �O(sh��)�Æ�Ƭ�C(j��)����ʹ��Ƭ�C(j��)ݔ�����m�ķ��i��̖(h��o)MCU_SD��IR2110̎������������B(t��i)�������Ƿ��i�����d�����\(y��n)�С���Ch1�y(c��)IR2110оƬ���_LIN����U1��12���_����ݔ����̖(h��o)��Ch2�y(c��)IR2110оƬ���_HIN����U1��10���_����ݔ����̖(h��o)������̖(h��o)�����c�ψD��ͬ�����a(b��)�ҷ�ֵ��5V����Ch1�y(c��)IR2110оƬLIN���_����U1��12���_����ݔ����̖(h��o)��Ch2�y(c��)IR2110оƬLO���_����U1��1���_����ݔ����̖(h��o)���ɂ�(g��)��̖(h��o)�IJ����Πռ�ձȑ�(y��ng)��ͬ��ݔ���늉���ֵ��5V���ң�ݔ����늉���ֵ��12.4V���ң���?y��n)�](m��i)�н�MOSFET��LO�˸��ƽ�ӽ�Vcc��12V���� ��Ch1��Ch2�y(c��)�ɂ�(g��)IR2110оƬ��LO���_����U1��1���_����̖(h��o)���Σ����߲��λ��a(b��)��늉���ֵ����12.4V���ҡ� 2.2.6 H �����· �(q��)��(d��ng)�·��ͨ늣���Ch1�y(c��)IR2110оƬLO���_����U1��1���_����̖(h��o)��Ch2�y(c��)IR2110оƬ���_HO����U1��7���_����̖(h��o)��LO늉���ֵ��12.4V���ң�HO���η�ֵ��18.8V���ҡ��������O(sh��)Ӌ(j��)�D��֪��LO��늉�ֵ����Vcc�pȥ��(n��i)�����ӹ܉��������ڌ�(sh��)�HVcc����12V������LO늉�����12V�����A(y��)�ڣ�HO��늉�ֵ����Vcc����7.2V�Դ�pȥMOSFET�܉����ٜpȥ��(n��i)�����ӹ܉��������ڌ�(sh��)�HVcc����12V��7.2V�Դ늉�����7.2V������HO늉���18.8V�����A(y��)�ڡ� 3.��Ƭ�C(j��)�����O(sh��)Ӌ(j��)�cС܇��(sh��)�(y��n) 3.1ǰ�M(j��n)�c�������
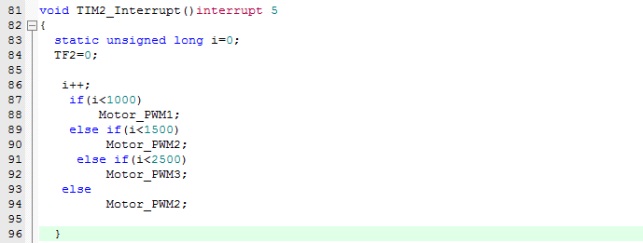
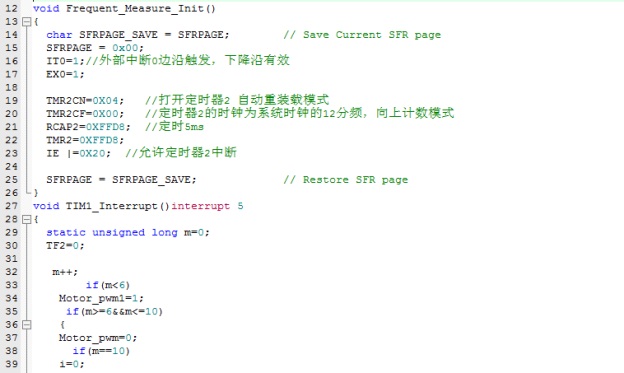
���ˌ�(sh��)�F(xi��n)��܇��ǰ�M(j��n)���˹��ܣ����ö��r(sh��)��2�����S�Д࣬�O(sh��)�ö��r(sh��)�r(sh��)�g��5ms�����xiС��1000�r(sh��)���\(y��n)��Motor_PWM1����(sh��)��ռ�ձȞ�60%��С܇ǰ�M(j��n)��ͬ����i��1000��1500�r(sh��)���\(y��n)�О�ռ�ձȞ�50%�ĺ���(sh��)��С܇ͣ܇2.5s;i��1500��2500�r(sh��)���\(y��n)��ռ�ձȞ�40%����(sh��)��С܇��܇5s�����ͣ܇�� 3.2PWM�l�ʵ��� ���ȶ��x����(g��)���_P0_1,P0_2,P0_3����PWM�����N��B(t��i)�µ�����(g��)��̖(h��o)ݔ���ڡ���i��0��1000�r(sh��)�����ö��r(sh��)��1�����r(sh��)�r(sh��)�g5ms��һ��10�ݣ����ڼ���50ms������ͨ�^(gu��)��׃���r(sh��)���r(sh��)�g���ɸ�׃�l�ʡ�ͨ�^(gu��)PWM1��ռ�ݔ�(sh��)�����ɸ�׃ռ�ձȞ� ��ͬ����i��ͬ�ķ�����(n��i)��ݔ����ͬ��PWM������(sh��)�F(xi��n)С܇ǰ�M(j��n)�����cͣ܇�� 4.�Y(ji��)Փ ���ڃ��ܵ��������O(sh��)Ӌ(j��)���������ڮ�ԭ��D��PCB�D������������Ϥ��һ��AD��ʹ�÷���������Ҫ���ի@����һ��Ҫ�J(r��n)�棬�ڮ�ԭ��Dһ��Ҫ���C�����ȶ���(zh��n)�_�B�ӡ��z��W(w��ng)�j(lu��)��(bi��o)̖(h��o)�Ƿص���Чλ�ã�Ȼ��PCB�r(sh��)���bһ��Ҫ���C��ȫ���_�������ڰ���������(l��i)��](m��i)��������r����PCB�r(sh��)߀��Ҫ����ҲҪ��ԭ��D������Ҫ�B��ӛ��(l��i)���ڔ[��Ԫ���r(sh��)���x�ý��ķ���һ��p�̌�(d��o)���L(zh��ng)�ȡ��ؑ�оƬ���_����Ҳ�](m��i)�нӾ�����(y��ng)ԓ��ʲô��裬����X(ju��)�ò���(du��)�ţ����̙z��ԭ��D��Ȼ������ڰ��ӻ�(l��i)��ĺ����c�{(di��o)ԇ�����ӵĕr(sh��)��һ��Ҫ���C�ИO�Եķ����ڱ��κ��ӕr(sh��)�������е�һ��(g��)51�W��躸����51K����裬�Y(ji��)���ڜy(c��)���εĕr(sh��)��늽����ֱ�ӱ�ը��Ҳ���Ǟ��Լ��IJ���(x��)�ĸ����˴��r(ji��)��ͨ�^(gu��)�����O(sh��)Ӌ(j��)�������Ҹ�������˽��n��֪�R(sh��)���^(gu��)����������һЩ��(w��n)�}���ɻ���(j��ng)�^(gu��)�M�L(zh��ng)��ͬ�W(xu��)���v��õ��˽��Ҳʹ���˽һЩ��(sh��)�H�c��Փ֮�g�IJ����֪�Լ��IJ��㣬��Ҫ�҂������J(r��n)���(y��n)֔(j��n)��
Altium Designer����ԭ��D��PCB�D���£�(51hei�����п����d�����ļ�)
 ������Word��ʽ�ęn51�����d��ַ��
������Word��ʽ�ęn51�����d��ַ��
 ���w˼��������܇�(q��)��(d��ng)�塱�O(sh��)Ӌ(j��)��(b��o)��.rar
(2.95 MB, ���d��(sh��): 103)
���w˼��������܇�(q��)��(d��ng)�塱�O(sh��)Ӌ(j��)��(b��o)��.rar
(2.95 MB, ���d��(sh��): 103)
2019-7-12 13:54 �ς�
�c(di��n)���ļ������d����
�O(sh��)Ӌ(j��)��(b��o)��
�w˼��������܇ԭ��DPCB�O(sh��)Ӌ(j��).rar
(101 KB, ���d��(sh��): 141)
2019-7-12 13:48 �ς�
�c(di��n)���ļ������d����
�O(sh��)Ӌ(j��)ԭ��DPCB����(k��)�ļ�
| 
 [��(f��)��朽�]
[��(f��)��朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664