直流電機具有良好的啟動和調速性能,被廣泛地應用于對啟動和調速有較高要求的拖動系統。本論文主要介紹了在基于FPGA用PWM實現直流電機調整的基本方法中PID算法及原理,直流電機調速的相關知識。簡單介紹了基于FPGA用硬件產生PWM信號的途徑。然后結合PID算法對整個系統進行閉環控制設計,整合到硬件電路中對直流電機調速的實現提供了一種有效的途徑。
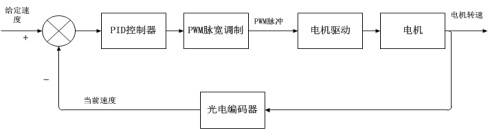
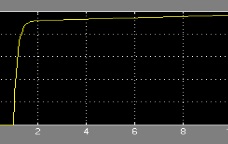
在現代工業中,各種生產機械根據其工藝特點,對拖動的電動機提出了各種不同的要求,有的要求能迅速啟動、制動和反轉;有的要求多臺電動機之間的轉速按一定的比例協調運動;有的要求電動機達到極慢的穩速運動;有的要求電動機起、制動平穩,并能準確的停在給定的位置。可見各種拖動系統都是通過控制轉速從而控制轉矩來實現的。與交流電動機相比,直流電動機由于調速性能好、靜差率小、穩定性好以及具有良好的動態性能、運行效率高等優點,因此在相當長的時期內,高性能的調速系統幾乎都采用了直流調速系統。 FPGA作為新型的大規模可編程數字集成電路器件,它充分利用計算機輔助設計技術進行器件的開發與應用。用戶借助于計算機不僅能自行設計專用集成電路芯片,還可在計算機上進行功能仿真和實時仿真,及時發現問題,調整電路,改進設計方案。這樣,設計者不必動手搭接電路、調試驗證,只須在計算機上操作很短的時間,即可設計出與實際系統相差無幾的理想電路。而且,FPGA器件采用標準化結構,體積小、集成度高、功耗低、速度快,可無限次反復編程,因此,成為科研產品開發及其小型化的首選器件,其應用極為廣泛。 本文主要研究的問題是,分析直流電機的調速方式,利用當前先進的數字技術和現代控制理論,在消除干擾環境中精確控制電機的起、制動,調節轉速,以提高可靠性、降低成本。最常用的直流調速技術是脈寬調制(PWM) 直流調速技術,它具有調速精度高、響應速度快、調速范圍寬和耗損低等特點。系統采用PWM調節實現對電機的調速,采用紅外發射接收對管采集電機轉速。FPGA系統內部進程工作在并行的狀態下,各子進程相互獨立,輸出的PWM波形具有頻率高,占空比調節步精密的特點。高頻率的PWM波形對直流電機工作的穩定起著極其重要的作用,尤其在高負載的調速系統中體現的優越性極其明顯,頻率越高電機運行越平穩。另外,對PWM 波形輸出占空比的調節步進細分的特點大大的擴大了調速系統的調速范圍。本設計中主要研究FPGA產生PWM波形的優越性并對其進行驗證,并且針對FPGA系統進行等精度頻率測量的高精度性進行驗證。 二 直流電機2.1 直流電機控制系統 系統主要由PID控制器、光電測速器(編碼器)、PWM脈沖寬度調制器、直流電機等組成。其中控制器采用數字PID控制器;采樣采用光電編碼器;PWM脈沖寬度調制器對模擬信號電平進行數字編碼;光電編碼器采用透射型帶光柵盤的光電斷續器。數學模型圖如圖2-1所示。 圖2-1 電機控制系統原理框圖 2.2 直流電機的數學模型建立 (1)直流電機電壓與輸出轉速關系圖: 圖2-2 電機電壓輸出與轉速關系 直流電機電壓與輸出轉速之間的傳遞函數為:  (2-1) 本論文采用永磁直流齒輪減速電機,型號為Zheng Gear-Box Motor ZGB37RG。有關參數表如表2-1所示。 表2-1 | | | | | | | | | | | | | | | V/(rad s) s) | | | | | | | | | | | | | | | | |
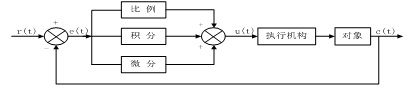
 ;  。 由此可知  ,所以可將傳遞函數近似為:  (2-2) 代入電機參數得電壓輸入與輸出轉速之間的傳遞函數關系為  (2-3) 以低電壓、低轉速以及大轉矩的實際直流電機為仿真背景,選額定電壓24V,減速比1/47.5,空載轉速100r/min,額定轉速70r/min,給定轉速60r/min。 三PID算法 3.1 PID算法 PID是Proportional(比例)、Integral(積分)、Differential(微分)三者的縮寫,PID控制是連續系統中技術最成熟、應用最廣泛的一種控制算法。比例控制是對當前偏差的反應,積分控制是基于新近錯誤總數的反應,而微分控制則是基于錯誤變化率的反應。PID控制實質是測量偏差、糾正偏差,并且根據輸入的偏差值,按比例、積分、微分的函數關系進行乘、加運算,把運算結果用以輸出控制  。 3.1.1 模擬PID 在模擬控制系統中,調節器最常用的控制規律是PID控制,常規PID控制系統原理框圖如圖3-1所示,系統由模擬PID調節器、執行機構及控制對象組成。
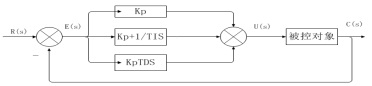
圖3-1 模擬PID控制系統原理框圖 PID調節器是一種線性調節器,它根據給定值  與實際輸出值  構成的控制偏差: 模擬PID調節器的控制規律為  (3-2) 式中,  為比例系數,  為積分時間常數,  為微分時間常數。 由式(3-2)可得,模擬PID調節器的傳遞函數為   (3-3) 3.1.2 數字PID 由于計算機只能識別數字量,不能對連續的控制算式直接進行運算,故在計算機控制系統中,首先必須對控制規律進行離散化的算法設計。 在連續時間域中,PID控制器控制系統框圖也直接可表述為 圖3-2 PID控制器控制系統框圖 PID控制傳遞函數為:  (3-4) 時域拉氏發變換為:  (3-5) 其中:e(t)為控制器的輸入即控制系統的給定量與輸出量的偏差;u(t)為控制器的輸出;  為比例系數;  為積分時間常數;  為微分時間常數。 控制輸出函數關系為:  (3-6) 協調參數 :當 增大時,可以加快系統的動態響應速度,減小系統穩態誤差,但不能完全消除穩態誤差  ,并且 過大,會引起系統振蕩,超調量增加,有可能造成系統不穩定。 (2)比例-積分控制器PI 控制輸出函數關系為:  (3-7) 加入積分環節,目的是消除系統穩態誤差,因為隨著不斷累加偏差,最終會消除穩態誤差,但是會影響系統的穩定性。積分時間常數 越大,積分作用越弱,反之則越強。因此,減小 ,可以消除穩態誤差 ,但是 過小,可能會造成系統不穩定,并且系統動態響應速度過慢。 (3)比例-積分-微分控制器PID 控制輸出函數關系為:  (3-8) 加入微分環節,用來改善系統動態響應速度過慢。在響應過程中,提前抑制偏差向任何方向的變化,對偏差變化進行提前預報,降低系統超調,增加系統穩定性  。協調參數 ,當 過大過小,也會影響系統的動態響應速度及穩定性。 四系統軟件設計 4.1 MATLAB設計思想 本論文運用它的圖像仿真功能判斷給出系統閉環傳遞函數的穩定性,然后使用Simulink仿真模塊對前面給定函數形式判斷測試出合適的P、I、D參數。 PID控制已經形成了典型結構,參數易于調整,結構簡單,且結果改變靈活(如PI、PD等),所以它被廣泛應用于許多工業生產過程控制,獲得了良好的效果。 圖4-1 系統PID控制框圖
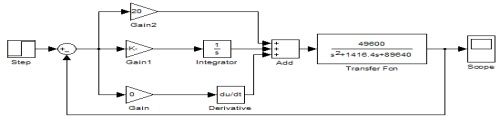
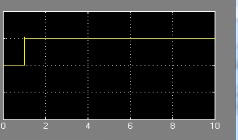
4.2 設計步驟及結果Matlab程序設計仿真如下: 圖4-1 直流電機輸出電壓與轉速函數關系Bode圖和Nyquist曲線圖 標記出奈圭斯特曲線與負實軸的交點及用bode圖繪出的相頻特性曲線與  線相交點坐標。 分析:1)由第一個圖知道,開環傳遞函數有兩個極點,即有兩條根軌跡(綠色部分),沒有零點。 2)由圖二知道,零極點圖中只繪出了一個極點P1=-66.4,而省略了另一個極點P2=-1350。 3)由開環傳遞函數表達式知,開環傳遞函數在,s右半平面極點個數P=0,(s=jw),w:0到正無窮變化時,奈圭斯特曲線繞點(-1,j0)逆時針旋轉圈數為N=0,根據奈圭斯特穩定判據得,Z=P-2N=0,所以閉環系統是穩定的,其中Z表示閉環傳遞函數在s平面右半平面極點個數。 4)根據對數頻率穩定判據(又稱Bode判據),閉環系統穩定的充分必要條件是  。通過觀察也可知,相頻特性曲線過 線次數為0,即 N=0,系統是穩定的。并且由P=0,也可計算N=0。 (2)純PID控制仿真 對電機同步控制系統采用PID,根據式(2-3)的傳遞函數,通過多次試驗,得到較適宜的PID參數:  ,設計了系統PID仿真結構圖及simulink仿真模塊,并得出仿真結果,分別如下圖4-2、4-3所示: 圖4-2 系統PID控制下仿真模塊設計 (a)PID控制下全局圖 (b)PID控制下局部圖 圖4-3 PID控制下直流電機同步仿真響應曲線 五 基于FPGA的直流電機閉環控制數字硬件系統設計 5.1 系統的工作原理 (1)總體硬件結構

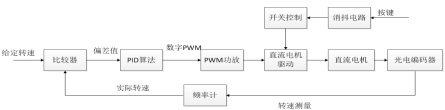
圖5-1 基于FPGA的直流電機閉環控制系統的總體硬件結構 (2)基于FPGA的直流電機閉環控制系統的系統工作流程框圖如圖6-2 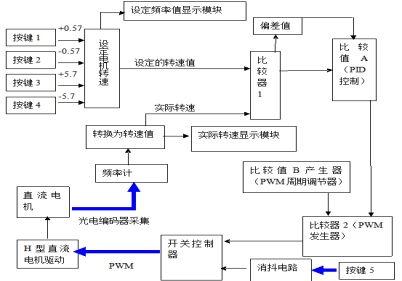
圖5-2 直流電機閉環控制系統的系統工作流程框圖 工作流程為:檢測到電機工作脈沖,將其轉換為實際轉速b,實際轉速b與通過鍵盤設定好的設定轉速a比較并且分析,得出偏差值Q,內部的PID調節器對偏差Q和a,b進行分析,輸出調節比較器2(PWM波形發生器)的比較值的信號。比較器2輸出的PWM波形接到電機開關控制器,電機控制器的輸出由輸入按鍵5控制。開關控制器開時輸出PWM波形到H型驅動電路驅動電機工作。 六 總結 在調速系統領域,作為一類新型的電機,直流電機在其結構特點和運行方式上具有比其他類型的傳統電機更為優秀的運行性能和更廣泛的適用范圍,因而應用前景廣闊。針對直流電機控制的研究越來越深入,控制器也不斷改進和翻新,控制性能不斷提高。本論文基于FPGA對直流電機進行PID自動控制,整個控制系統看似復雜,但是將其中幾個模塊拆開來獨立進行研究就顯得簡單容易多了。整個系統體積小、可靠性高、靈活性強,實現了數字式控制。 本文研究表明,基于FPGA的永磁直流減速電機速度控制系統,采用數字硬件方式實現控制算法,整個系統速度快,可靠性高、具有可擴展性,大大縮短了硬件開發的周期。
完整的Word格式文檔51黑下載地址:
 文檔.doc
(407.4 KB, 下載次數: 61)
文檔.doc
(407.4 KB, 下載次數: 61)
2019-6-24 01:15 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
| 











 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

