|
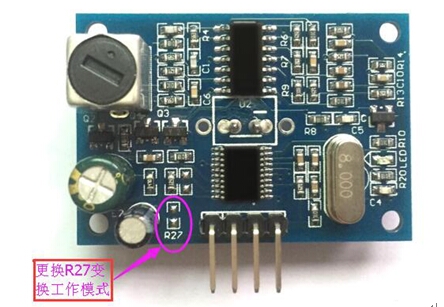
目前市售的超聲波模塊一般有兩種,一種是雙探頭模塊,如下圖: 一種是單探頭(一體化探頭)模塊,如下圖: 第一種一般只有電平脈沖模式測距,而第二種一般有三種模式: 1、電平脈沖,即;模塊收到有效觸發信號后,內部將發出40kHz 周期電平并檢測回波。一旦檢測到有回波信號則輸出回響信號或者對應串口訊號。 (1)采用IO觸發測距,給至少10us的高電平信號; (2)模塊自動發送8個40khz的方波,自動檢測是否有信號返回; (3)有信號返回,通過IO輸出一高電平,高電平持續的時間就是超聲波從發射到返回的時間. 2、自動串口模式; 3、觸發串口模式 模塊接收到串口觸發信號,每次輸出一幀,含4個8位數據.幀格式為:0XFF+H_DATA+L_DATA+SUM 1、0XFF:為一幀開始數據,用于判斷. 2、H_DATA:距離數據的高8位. 3、L_DATA:距離數據的低8位. 4、SUM: 數據和,用于效驗.其0XFF為開始偵不參與校驗,H_DATA+L_DATA=SUM(僅低8位). 5、H_DATA與L_DATA合成16位數據,即以毫米為單位的距離值. 本人購買的SR04T一體化超聲波測距模塊,通過更換R27,即可變換工作模式:不接時為脈寬輸出模式,為47K時為自動串口模式,為120K時為觸發串口模式。 本人通過為兩種模塊的測試,覺得第二種無論是穩定性還是準確度都比第一種遜色得多(雖然第一種有些距離段也會波動)。使用第二種測距時,距離數據總不停地抖動,20厘米以上60厘米以內數據還比較穩定,但超過80厘米后距離波動幅度令人吃驚。這是原產品設計的缺陷還是這種單探頭的模塊本身就是這樣,這有待以后的證實。
| 










 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

