���O(sh��)Ӌᘌ��o̼С܇ِ���ϵK���S�C�ԣ�ֻ�����μ��ęCе�Y(ji��)��(g��u)���y���F(xi��n)�ϵK�Ķ�ܣ������ᘌ��@�Nِ���ϵK���ڙCе�Y(ji��)��(g��u)�Ļ��A(ch��)����������늿صķ�����С܇�Ԅ�ѭ�E�����F(xi��n)���S�C�ϵK�Ķ�ܣ����O(sh��)Ӌ��Ҫ��(c��)�����·���ֵ��O(sh��)Ӌ�����ó���ģ�K�M��С܇ѭ�E������늙C���Ɵo̼С܇���D(zhu��n)���چ�Ƭ�C�����µı����㷨��
���ȣ����Č����o̼С܇�Cе�Y(ji��)��(g��u)�������ֵ�ԭ�������c����С܇�C��(g��u)���w�O(sh��)Ӌ�IJ����M���U��
��Σ���B늿ز��ֵ����w�O(sh��)Ӌ�������·ģ�K��ԭ���O(sh��)Ӌ����Ƭ�C��������������늙C��ԭ�������c�����x�á�
�ٴΣ����o̼С܇��ِ������βɼ���Ϣ����γɹ����F(xi��n)����ϵK���㷨�M��Ԕ���Ľ�B��
����C늽M�ϵąf(xi��)�{(di��o)�����������F(xi��n)�Ć��}������{(di��o)ԇ�M���f����
Ŀ �
1.�wՓ 1
1.1�n�}������Ŀ�� 1
1.2����(n��i)�����r 1
1.3�n�}����� 2
1.4��(g��u)�ɼ��о���(n��i)�� 2
2 �o̼С܇�ęCе�����O(sh��)Ӌ 3
2.1 С܇�O(sh��)Ӌ�����c��ԭ�� 3
2.2 С܇�������O(sh��)Ӌ�����c 3
2.2.1 ܇�ܵ��O(sh��)Ӌ 3
2.2.2 �����b�õ��O(sh��)Ӌ 4
2.2.3 �����b�õ��O(sh��)Ӌ 4
2.2.4 �����b�õ��O(sh��)Ӌ 5
2.2.5 �D(zhu��n)���b�õ��O(sh��)Ӌ 5
2.2.6 �Y(ji��)��(g��u)����(sh��)���O(sh��)Ӌ 5
3 늿�ϵ�y(t��ng)���O(sh��)Ӌ 7
3.1늿�ϵ�y(t��ng)�����w�O(sh��)Ӌ 7
3.2늿ظ�ģ�K���O(sh��)Ӌ 8
3.2.1 �Դ��(w��n)��ģ�K���O(sh��)Ӌ 8
3.2.1 ��Ƭ�C�����O(sh��)Ӌ 9
3.2.3 �ضșz�y�·���O(sh��)Ӌ 12
3.2.4 �D(zhu��n)���b�õ��O(sh��)Ӌ 13
3.2.5���Ϸ�ʽ���O(sh��)Ӌ 16
3.2.6 �����㷨���O(sh��)Ӌ 18
3.2.7��ָ̖ʾ�·���O(sh��)Ӌ 19
3.2.8 �������dģ�K�O(sh��)Ӌ 20
3.3 ܛ�����O(sh��)Ӌ 20
3.4 �C�ϵ�y(t��ng)�İ��b�c�{(di��o)ԇ 22
1.1�n�}������Ŀ�� �S�����I(y��)�İl(f��)չ��ȫ��(j��ng)��Ѹ�����L���κ����ﶼ�Ѓ����ԣ������S����(j��ng)��ȫ�ĵ������ڽ�(j��ng)���l(f��)չѸ�ٵ�ͬ�r��ȫ��ĭh(hu��n)��Ҳ�u�u�Đ����������˂�Ҳ���R���h(hu��n)�����ڵć��؆��}����İl(f��)չ���ò������_�������]�h(hu��n)�����}������Ӱ푡����o̼��һ�~Ҳ������������֪���o̼�����o̼܇���o̼�a(ch��n)Ʒ�ȣ� ���o̼С܇�������w�F(xi��n)���@�N�o̼����������ρ�����С܇�������D(zhu��n)�Ʉ��ܣ����܌��F(xi��n)ָ���\��܉�E��С܇[1]�����������x�ό��F(xi��n)�ˣ��o̼���Gɫ���h(hu��n)��.���������@�N�߂�һ���ض����ܵğo̼�Y(ji��)��(g��u)��̎��Ҋ���������С܇���F(xi��n)����˂����ڟo̼��������⣬�о��c�_�l(f��)��������l(f��)չ������Ҫ�����x�Ͱl(f��)չǰ���� 1.2����(n��i)���о���r �ڴ�s20���o70������Ї��о�������܇�_ʼ�l(f��)չ�������@ô�����^ȥ�ˣ�Խ��Խ�wϵ����Խ��Խ���죬�������ܱ�����Ϣ�ɼ���ʽ�Ϻͱ����㷨�����кܴ�ĸ��ơ�����(j��)��܇�D(zhu��n)��C��(g��u)��ԭ������С܇�D(zhu��n)���r��������ʹС܇���Άο��Կ���푑�(y��ng)��ҲҪ�����ٶ��^��ƫ�x�ܵ�[2]����늙C��λ����ߣ�������Ť�أ�����С܇��ҕ�Xϵ�y(t��ng)��ِ����Ϣ�ɼ��b�ã��ڌ����R�e�ɹ���ͬ�rҕ�Xϵ�y(t��ng)�֕��l(f��)���ƽ��̖���_���������ģ��l(f��)��ָ��o�(q��)�Ӳ��֣�������С܇�D(zhu��n)�����ѭ�E [3]����t���f��݆���Ą�݆������늙C���\�ӣ����F(xi��n)������������(j��)늴ŸБ�(y��ng)��ԭ�������ɽ�tʹ����LC�C���·�ķ������Б�(y��ng)늴���̖���E [4]�� Ŀǰ���������S�����Ҷ��ڷe�O�M������С܇���о����O(sh��)Ӌ�_�l(f��)���ё�(y��ng)���ڶ����I(l��ng)��������܊�£�̽�y�I(l��ng)��đ�(y��ng)���eͻ�����ڶ��������ںϵļ��g(sh��)�I(l��ng)��[5]��������܇���\��܉�E��ͨ�^ʹ��Ӌ��C���̼��g(sh��)�����܉�?q��)���܇���Ġ�B(t��i)�M���Ԅӿ��ƣ������(q��)�Ӻ��Ƅӣ��ٶȵĴ�С�c�����ڴ�s��ʮ���o��ʮ���������Ӌ��C���g(sh��)���댧(d��o)�w��ͨ�ż��g(sh��)�� �w�S�l(f��)չ�������_ʼ�����ڙC���˵��о����кܶ��о����кܶ�܊�rֵ�c��(y��ng)��ǰ������1997�꣬���ܼ{������܇�ϰ��b��5�_����y���x[6]������С܇���ԄӶ���ϵK��
1.3�n�}�о����� �����˂����o̼�h(hu��n)�����ᳫ�ͽ���팦���ܙC���˵��о��ᳱ���ؽY(ji��)�σ��߶�������о��n�}.���n�}���о��C�����^������ֵ����������W(xu��)�^�ęC�֪�R�� ���n�}���о����Լ�����ԭ�t����һ�������龀���������ܰl(f��)���ԔUɢ���о��������t�ǟo̼С܇���� �����������������ϵK�g���S�C��ِ�����Ԅ�ѭ�E���ϡ�����ͨ�^���n�}��Ҫ�������˽⣬ͨ�^�īI�z����ᘌ��ԵIJ���P(gu��n)���Ԅ�ѭ�EС܇���Y�ϣ��˽��Ԅ�ѭ�E�o̼С܇�İl(f��)չ����(y��ng)�ã��Լ��о��ɹ�.�ڌ��`��Դ�ϣ���ͨ�^��������ِ��Ʒ���^���о��O(sh��)Ӌ���o̼С܇�Ĵ��½Y(ji��)��(g��u)��Ȼ�������YԴ���Ϸ������Լ��W(xu��)�^�ęCеԭ�����Cе�O(sh��)Ӌ���·���Ԅӻ����Ƶ����P(gu��n)��Փ֪�R��Ӌ��С܇����������(sh��)�����w�����Լ����Ԫ�����͂������Ĺ���ԭ�����˽���x�á����O(sh��)Ӌ�õĽY(ji��)��(g��u)����(sh��)ͨ�^���Sܛ�����佨ģ�b�䣬�����·�D���������ӹ��M�b���M�ЙC늽M�ϵĜyԇ���{(di��o)ԇ�� �����������������ϵK�g���S�C��ِ�����Ԅ�ѭ�E���ϡ�����ͨ�^���n�}��Ҫ�������˽⣬ͨ�^�īI�z����ᘌ��ԵIJ���P(gu��n)���Ԅ�ѭ�EС܇���Y�ϣ��˽��Ԅ�ѭ�E�o̼С܇�İl(f��)չ����(y��ng)�ã��Լ��о��ɹ�.�ڌ��`��Դ�ϣ���ͨ�^��������ِ��Ʒ���^���о��O(sh��)Ӌ���o̼С܇�Ĵ��½Y(ji��)��(g��u)��Ȼ�������YԴ���Ϸ������Լ��W(xu��)�^�ęCеԭ�����Cе�O(sh��)Ӌ���·���Ԅӻ����Ƶ����P(gu��n)��Փ֪�R��Ӌ��С܇����������(sh��)�����w�����Լ����Ԫ�����͂������Ĺ���ԭ�����˽���x�á����O(sh��)Ӌ�õĽY(ji��)��(g��u)����(sh��)ͨ�^���Sܛ�����佨ģ�b�䣬�����·�D���������ӹ��M�b���M�ЙC늽M�ϵĜyԇ���{(di��o)ԇ�� 1.4��(g��u)�ɼ��о���(n��i)�� ������Ҫ�оwՓ���֣��o̼С܇�������ֵĽY(ji��)��(g��u)���c��늿ز��ֵ��O(sh��)Ӌ���C늽M���{(di��o)ԇ�ĴֽM�ɡ� ������ƪ���_�˾wՓ���֣����o̼С܇�n�}չ�_ӑՓ�о��ı����c���x���Ї��İl(f��)չ�͇���İl(f��)չ�vʷ�c��r�����Cе���ְ��ŵ��ĵڶ��¹�(ji��)�����ڱ�ע���ڌ�늿ز��ֵ��O(sh��)Ӌ����˙Cе���������ν�B���Cе������Ҫ��B�˽M��С܇�Ď״֣��������ֵ����c�����w���֣���Ҫ�Y(ji��)��(g��u)�ą���(sh��)�O(sh��)Ӌ������������늿ز��֣�������Ӳ����ܛ�����O(sh��)Ӌ��Ӳ��������Ҫ��B��늿ز��ֿ���С܇�D(zhu��n)���ԭ�����·Ӳ�����O(sh��)Ӌ��������Ҫ�����·ģ�K��ԭ����ģ�K�x�ã�������Ƭ�C���Ɔ�Ԫ�Ľ�B�������y����������ԭ�����˽���x�ã��ض��a��ģ�K��ԭ�����x�ú�늙C��ԭ�����x�ã�С܇���ϵ�ԭ���c�㷨�O(sh��)Ӌ��ܛ����B��늿�С܇����˼��Ͳ��E������ǙC늽M���{(di��o)ԇ��
�����}Ŀ�ǡ��o̼С܇������С܇ǰ�M�Ą���ֱ�������������^���Мp�ٵ����������ṩ��ֻͨ�^���������c�Cе�ܵ��D(zhu��n)�Q��ʹ��С܇���F(xi��n)ǰ�M���D(zhu��n)����{(di��o)��(ji��)�����������ṩ��4������������С܇ǰ�M�Ą����������ض���܉�E�@�^�O(sh��)�����ϵK.�������Ҫ���]С܇���������߾��x��ɱ��ϡ����O(sh��)Ӌ�^���б���С܇���������D(zhu��n)�����ʣ�����ƽ��(w��n)�ԣ������ԣ����Ͼ��_�ԣ����{(di��o)�Ե�ԭ�t��܇���Y(ji��)��(g��u)��(y��ng)���Σ��p�ɣ��ڲ����ϑ�(y��ng)�x���^�p�IJ��ϣ�ͬ�r��Ҫ���CС܇���w�Ŀɿ��ԡ�ͨ�^��С܇���ܵķ�����С܇��Ҫ����������ܵ��D(zhu��n)�Q���(q��)���������ߣ��Ԅӱ��_�ϵK����˷����O(sh��)Ӌ�@�����(j��)С܇��Ҫ��ɵĹ��܌�С܇���֞����������M��ģ�K���O(sh��)Ӌ���քe��܇������Դ�����(q��)�Ӳ��֣����Ӳ��֣��D(zhu��n)�֣�܇݆���֣��{(di��o)���֡�һ������������С܇��(y��ng)ԓ����������ĵĽY(ji��)��(g��u)������Ҫ�����ǂ��Ӻ��D(zhu��n)�� [7]�� �K�ӵ�һ߅�@�^С܇�̶�����݆ϵ�����a�ϣ��(q��)���SҲ���K���pס�������a�ĸ�̎�������r���������(q��)���S���D(zhu��n)�����ٶ�ͨ�^һ���X݆���әC��(g��u)���f�o܇݆�S��܇݆�S���Ӻ�܇݆�(q��)��С܇���������ϵK��r��ϵ�y(t��ng)��ͨ�^�·ģ�K�ęz�y��Ӌ�㣬����ǰ܇݆�D(zhu��n)����ɱ���.��С܇܇���^��r�����ͨ�^�Ƅ��b��ʹС܇�p�٣�С܇�ڜp���Ƅӵĕr�����Ħ�����M��һЩ�������@�^���ϵK�࣬ͨ�^���Cе�Y(ji��)��(g��u)�ă�(y��u)���O(sh��)Ӌ�폛�a�Ƅ��b�Óp�ĵ������� 2.2 С܇�������O(sh��)Ӌ�����c 2.2.1 ܇�ܵ��O(sh��)Ӌ ܇�ܲ��ó��ܴܺ����������Ҫ��͡����]�������ӹ��ɱ��ȣ�܇�ܲ����X�ļӹ����������ǵװ�ʽ��С܇�����đ�(y��ng)�^�ͣ�����ƽ��(w��n)������С܇܇�����������^�p���Ա��C܇�܁�֧������܇���������������^���в���܇������܇�w�^�؎������������M�����ܱ���܇�w�^�pʹС܇��(c��)����܇����D��
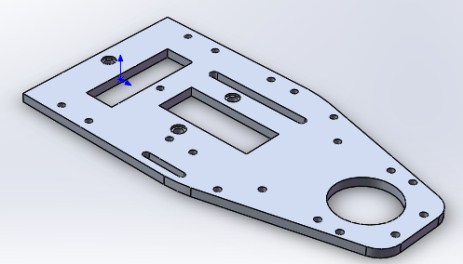
�D2.1 �o̼С܇܇�{ 2.2.2 �����b�õ��O(sh��)Ӌ ����С܇�(q��)����Դ���ޣ���Ҫ���C�܉�����һ���ľ��x���������������D(zhu��n)�����(q��)���S�ϵ�Ч�ʑ�(y��ng)��������M�Ʉ������ֵ����K��������֧������������݆��1ǧ���|(zh��)����������X݆�(q��)���S��������Ч���Ʒ�������������������������������^���еĔ[�ӣ��@���O(sh��)Ӌ�ĺ�̎��������[���^���в���Ҫ�������p�ģ������Ŀ�����������r�[�ӵķ��ȣ�С܇Ҳ�ܱM���ܵĄ�������ֹ��һ�����������ķ�܇����ƫ���}�� �����b�ò��ֵ��O(sh��)Ӌ��(y��ng)ԓ�Y(ji��)��(g��u)���Ρ���(y��ng)��������С܇�(q��)�����������@���(q��)���S�ϣ�ֱ���O(sh��)Ӌ�M����С��С܇���Ӽ��ٶȲ���̫�������^���Б�(y��ng)ƽ��(w��n)�����٣���ˌ��(q��)���S�O(sh��)Ӌ�Ɏ����F�ȣ��ڴ��S�i���Ա��C�������أ�С�S�i�_��С܇�����١� 2.2.3 �����b�õ��O(sh��)Ӌ С܇�Ą�����Դ���ځ���ֻ��һ��4�������������ܣ��@Щ���������D(zhu��n)���c���ߣ������b�ú��D(zhu��n)���b����Ҫ��{(di��o)�ͣ��_����õĹ�����B(t��i)������\�ӵąf(xi��)�{(di��o)�Ծ���Ҫͨ�^����ϵ�y(t��ng)�����C[8]��ҪʹС܇���ĸ��h�����O(sh��)Ӌ��܉�����_����ʹ�����әC��(g��u)��횂���Ч�ʸߣ����ӷ�(w��n)�����Y(ji��)��(g��u)���������p�����O(sh��)Ӌ�����X݆һ�����ӣ��߾��ȣ��\��������������г��d���d�ɵă�(y��u)�ݣ����ڂ��ӱ�ֵ�ǹ̶��Ĕ�(sh��)ֵ��������Ժ���{(di��o)ԇ�^���в����㣬С܇���w���ȕ�����С܇�ڱ����D(zhu��n)�ӷ���ĕr���D(zhu��n)�����ʕ��Ӵ�
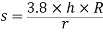
�������������������ͣ�����ƽ��(w��n)һЩ�� 2.2.4 �����b�õ��O(sh��)Ӌ ܇݆�cِ�����|�ľ��x����ΜpСС܇�c�����Ħ���ǜp����Դ���M���P(gu��n)�I���xȡĦ��ϵ��(sh��)�^С���X�ģ��pС�c����������������X���^�p��܇݆��ֱ���^С����С܇���ӕr�a(ch��n)����ļ��ٶȣ�����Փ�ϣ��(q��)���S�D(zhu��n)�^һȦ��܇ֱ݆��Խ��С܇�ߵ�Խ�h�����^���c�������^���������������������.�چ��ӕr���M��ʹС܇܇݆ͬ���(q��)�ӣ���ֹ������ƫ�����D(zhu��n)���r����Ȧ�̓�(n��i)Ȧ܇݆���ٶȲ�һ�ӣ������Ҫ��܇݆�O(sh��)Ӌ�ɲ��ٽY(ji��)��(g��u)��܇݆�S�ϰ��b�ɂ������S�У������S�����D(zhu��n)�r���ɣ����D(zhu��n)�i�o�������S��ԭ�����Σ��ٶ��^����݆�Ӟ�����݆���ٶȿ�Ğ�Ą�݆[9]������݆�͏Ą�݆���ཻ���M�У��@�Ӽȿ��Ա��C���ӕr�p݆ͬ���D(zhu��n)�ӣ��D(zhu��n)���rҲ���״� 2.2.5 �D(zhu��n)���b�õ��O(sh��)Ӌ �D(zhu��n)���b�õ��O(sh��)Ӌ�ǛQ����С܇�ܷ������ɱ��ϵ��P(gu��n)�I������ǰ܇݆�ķ�(w��n)��ƽ��(w��n)��Ҫ�������O(sh��)Ӌ��ͬ�Ӟ��˜p���cِ����Ħ�������O(sh��)Ӌǰ܇݆�Č����^С��܇݆��ǰ܇�S���S���B�ӣ��pС����������܇�S��ǰ݆܇��֧�Σ���ǰ݆܇���S�ϰ��b�ɂ��L���S�У��ɶ˹̶�����ֹǰ݆�΄ӣ�������D(zhu��n)�����ȡ� 2.2.6 �Y(ji��)��(g��u)����(sh��)���O(sh��)Ӌ ���O(sh��)Ӌ�����x�����ӱȞ�3.8���x��Сģ��(sh��)0.5������X݆�����|(zh��)���X�Ͻ��M�о��и�ӹ�.С�X݆�X��(sh��)�x����36�������X݆�����з�ֹ�����Xͬ�r���ϣ����X݆��С�X݆����ͬ�r��ż��(sh��)���t���X݆��137��С�X݆�����Դ��ڴ��X݆����ֹ�X݆�����л��ӡ� ���(q��)���S�@�^һȦ�r���ڂ��ӱȵĎ����£�܇݆�S�͕��D(zhu��n) Ȧ���t܇݆���ľ��xҊʽ Ȧ���t܇݆���ľ��xҊʽ  ��2.1�� ��2.1��
 ���(q��)���S�D(zhu��n)�^һȦС܇���ߵľ��x��R���܇ֱ݆�����������½��߶Ȟ� ���(q��)���S�D(zhu��n)�^һȦС܇���ߵľ��x��R���܇ֱ݆�����������½��߶Ȟ� �r���tС܇���ľ��xҊʽ �r���tС܇���ľ��xҊʽ
 ��2.2�� ��2.2��
 ��С܇���߾��x�� ��С܇���߾��x�� ���(q��)���SС��.�ɹ�ʽ��֪�����½��߶�һ������r�£���܇݆�c�(q��)���SС����Խ��С܇���ߵ�Խ�h������ڱ��C�������(q��)��������r�£��M���܌�����֮���O(sh��)Ӌ�Ĵ����X݆��D�� ���(q��)���SС��.�ɹ�ʽ��֪�����½��߶�һ������r�£���܇݆�c�(q��)���SС����Խ��С܇���ߵ�Խ�h������ڱ��C�������(q��)��������r�£��M���܌�����֮���O(sh��)Ӌ�Ĵ����X݆��D��
�D2.2 һ���p���X݆
3 늿�ϵ�y(t��ng)���O(sh��)Ӌ 3.1늿�ϵ�y(t��ng)�����w�O(sh��)Ӌ С܇���D(zhu��n)���}��늿�ϵ�y(t��ng)��Q�������D(zhu��n)���b�ò�����ȫ��ه�ڙCе�Y(ji��)��(g��u)�O(sh��)Ӌ [10]�������O(sh��)ӋС܇���ϵĕr���y�Ƚ����˺ܶࡣ 늿�ϵ�y(t��ng)���O(sh��)Ӌ���F(xi��n)���ڲ�ͬ�g����ϵK��(n��i)�������Ԅӱ��ϵĹ��ܣ���(y��u)�����������y(t��ng)�ęCеС܇�ڿ�׃�g���y���Ԅӱ��ϵĆ��}�� 늿ز��ֿ��Ƶ�ԭ�����Ɇ�Ƭ�C���ƣ�ͨ�^����ģ�K�z�y��·�ϵĠ�r����Ƭ�Cؓ؟������Ϣ��̎�����ɾ����õij����Ɇ�Ƭ�CӋ�㣬����늙C���D(zhu��n)�ǣ�����ǰ݆�M���D(zhu��n)�������˺����·Ӳ�����O(sh��)Ӌ������С܇ϵ�y(t��ng)����ģ�K���O(sh��)Ӌ [11]������С܇�Ă�����һ����üt�⌦�ܣ������_�P(gu��n)�������y�࣬���ٶȂ�������ָ��ᘂ���������C��ֱ��늙C��L298N�������ȡ������O(sh��)Ӌ��늿ز��֣���(y��ng)ԓ�Ɇ�Ƭ�C���Ʋ��֣��������y���ض�ģ�K��늙C�D(zhu��n)��,С܇�����㷨�O(sh��)Ӌ���֡�늿�ϵ�y(t��ng)�O(sh��)Ӌ�Ĝʴ_�ԛQ����С܇�ܷ����ͨ�^�ϵK���o̼С܇늿ض���ϵK���㷨���y�c������(j��)С܇ِ������r��ِ���ɷ֞�ֱ��ِ���͏���ِ������С܇��ֱ���M�돝���r����M����Ч�ı��ϣ�����O(sh��)Ӌ�����㷨�����С܇���Ͼ�����늿�ϵ�y(t��ng)�O(sh��)Ӌ�е��y�c��늿�ϵ�y(t��ng)�����w�Y(ji��)��(g��u)��D��
3.2늿ظ�ģ�K���O(sh��)Ӌ 3.2.1 �Դ��(w��n)��ģ�K���O(sh��)Ӌ �Դ�·�DZ��C�����·ϵ�y(t��ng)�܉�����������ǰ�ᣬ�·ϵ�y(t��ng)�����������dž�Ƭ�C����Ƭ�C�Ĺ���늉��� ������Ҫʹ�·�܉������Ĺ������tҪ���Cݔ�뵽����늿�ϵ�y(t��ng)��늉�����ͬ�r������С܇����^�����܉���ṩ�Դ�������Ƅ��Դ���·��늣����O(sh��)Ӌ���Դ�·����һ��(ji��)���� ������Ҫʹ�·�܉������Ĺ������tҪ���Cݔ�뵽����늿�ϵ�y(t��ng)��늉�����ͬ�r������С܇����^�����܉���ṩ�Դ�������Ƅ��Դ���·��늣����O(sh��)Ӌ���Դ�·����һ��(ji��)���� 늳ع�늣����䰲�b��һ��늳غЃ�(n��i)��ԓ늳غ��Ԏ��Դ�_�P(gu��n)�������܉�õ��Ĺ���늉�����Ҫ���߉��M�н�����(w��n)��ݔ����������Ҫһ���Դ������(w��n)��ģ�K���Դ��(w��n)��ģ�K��D�� 늳ع�늣����䰲�b��һ��늳غЃ�(n��i)��ԓ늳غ��Ԏ��Դ�_�P(gu��n)�������܉�õ��Ĺ���늉�����Ҫ���߉��M�н�����(w��n)��ݔ����������Ҫһ���Դ������(w��n)��ģ�K���Դ��(w��n)��ģ�K��D�� �D3.1 �Դ�·
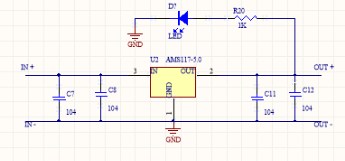
�D3.2 AMS117-5.0����ģ�K ����ģ�K�x�õ���AMS117-5.0����ģ�K�������̫�ߵĕr��ģ�K�͕������������ã��ض����ߵĕr��Ҳ�����o������늳ط��Ӻͷ����뱣�o�· [12]��ԓģ�K�����M��DC6.5-12V늉���ݔ�룬ݔ��늉���(w��n)����5v,ݔ����������800ma��ݔ��ݔ��һ������4��������_�����Դָʾ�����܉���õ��Д�ģ�K�Ƿ�����
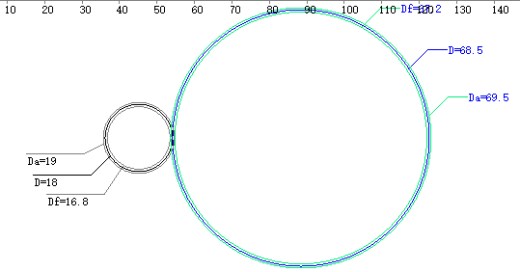
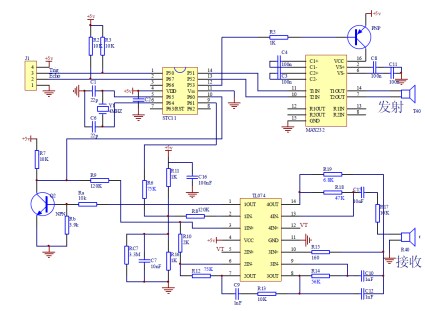
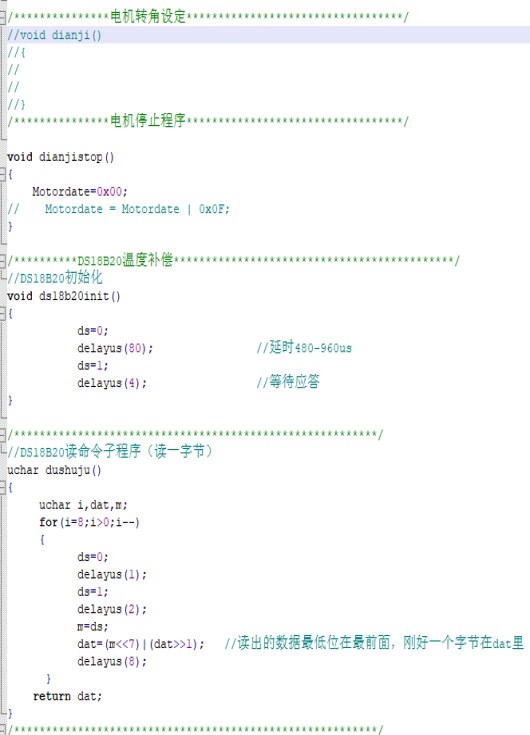
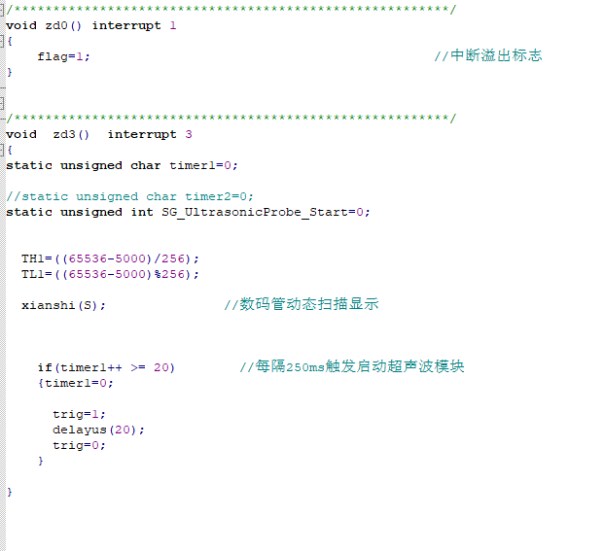
3.2.1 ��Ƭ�C�����O(sh��)Ӌ ����늿�ϵ�y(t��ng)�ĺ��ľ�����Ĵ��X���ٿv������ϵ�y(t��ng)������(y��ng)ԓ�߂�̎��ϵ�y(t��ng)��(sh��)��(j��)�����ܺͰl(f��)��ָ����Ƹ���ģ�K�Ĺ��ܡ��ڽ����꣬��Ӽ��g(sh��)�c�����·���w�S�l(f��)չǰ�M�������y(t��ng)�ď�(f��)�s���·���ɵ�һ�KоƬ�ϣ��������ͻ�����ܻ������ٻ����������ķ���l(f��)չ�������·���ɻ��ĵ��Ϳ���оƬ��Ƭ�C����һ������������Ƭ�C�߂��˔�(sh��)��(j��)̎�������r����Ӌ��(sh��)������(sh��)ģ�·�D(zhu��n)�Q�����ƹ��ܣ���Ƭ�C�܉�?q��)����յ��Ĕ?sh��)��(j��)�M�п��ٵ�̎���\�㣬������(j��)����(y��ng)�ij���l(f��)��ָ��ȥ��������(y��ng)��ģ�K����Ƭ�Cռ�õĿ��gС����Ϣ�惦����Ӌ���\���ٶȸߣ����ģ��m��(y��ng)������������(y��ng)�`���������Ռ��F(xi��n)ģ�K���O(sh��)Ӌ�� �ڴ��n�}�·�O(sh��)Ӌ�У�Ӳ����������ʹ���ˆ�Ƭ�C��̖��AT89S52��һ�N���ġ�������CMOS8λ������������8K�ֹ�(ji��)ϵ�y(t��ng)�ɾ���Flash�惦����8k�ֹ�(ji��)Flash��512�ֹ�(ji��)RAM�� 32 λI/O �ھ������T�����r������(n��i)��4KB EEPROM��MAX810��(f��)λ�·��3��16 λ���r��/Ӌ��(sh��)����4���ⲿ�Д࣬һ��7����4���Д�Y(ji��)��(g��u)(���݂��y(t��ng)51��5����2���Д�Y(ji��)��(g��u))��ȫ�p�����пڡ���Ƭ�C���й��ĵͣ��W(xu��)�����յ����c����Ƭ�C�Ĺ���늉���5V�����O(sh��)Ӌ��һ��(ji��)9V늳ؽ�(j��ng)����ģ�K��(w��n)��ݔ��5V��늣���Ƭ�C��Сϵ�y(t��ng)�dž�Ƭ�C�܉�����ǰ�ᣬ��(f��)λ�·�������Ǯ���Ƭ�C����l(f��)���e�y�r������(f��)λ�·�ď�(f��)λ���o��������Ƭ�C���¹���.�r��·���Ƭ�C�ṩһ���Ĺ�(ji��)�࣬�dž�Ƭ�C�Зl���ɵĹ�����ԓϵ�y(t��ng)���Æ�Ƭ�C��Сϵ�y(t��ng)���iDC05ģ�K��ԓģ�K���˕r��·�͏�(f��)λ�·֮�⣬߀������ISP�������d�ڣ�P0���������裬���ЃɷN�Դ��늷�ʽ��һ�N��DC-005���Դ�������������M����Դ�˺ͽӵضˣ�����ݔ���ݔ��늉��������11.0592MHz���������i�_�P(gu��n)���S���׃�Դ��ͨ��늠�B(t��i)����Ƭ�C����Сϵ�y(t��ng)���£�
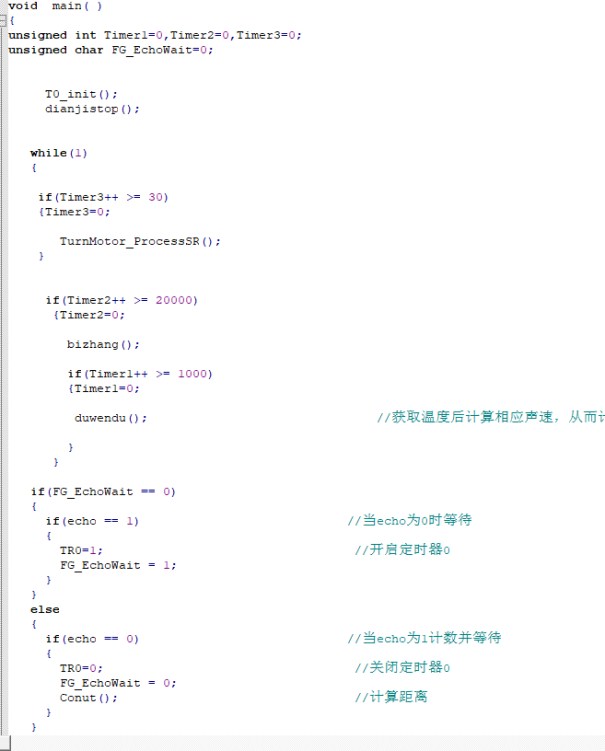
�D3.3 AT89S52��Ƭ�C��Сϵ�y(t��ng)ģ�K 3.2.2�y��ѭ�Eģ�K���O(sh��)Ӌ �y��ģ�K���x�ÛQ������Ƭ�C�Ƿ��ܽ��յ��ʴ_��ِ����Ϣ���Ƿ��ܰ����O(sh��)Ӌ�ij���ɹ�����.�y�����Eģ�K���x�õ�Ҫ��(y��ng)ԓ���Ќ�ِ����Ϣ�ʴ_��ӳ�ĸ߾��ȣ��l(f��)��ͽ�������̖���`���ԣ��R�e�ϵK��ķ����V���������y����С܇�R�e�ϵK��Ϣ������ϵK�ĸ���(j��)���ڱ���Ĝy��һ���һ���г����ͼt������� [13]�������������nj�������̖�D(zhu��n)�Q������������̖��ͨ�������̖�Ă�����������������l�ʸ���20KHz�ęCе�����������l�ʸߡ����L�̡��@��F(xi��n)��С���e�Ƿ����Ժá��܉�ɞ��侀��������������c�� �\�Õr�gӋ�r�ķ����y�����x������ԭ���ǽo�賬��һ������10us���������ƽ��̖���@���������ɿ��Ɔ�Ԫ��Ƭ�C�l(f��)����������ģ�K���յ��@����̖�ĕr�� ��ģ�K�͕����l�ʞ�40kHz�����l(f��)�������r�����@���r��͌���Ӌ�r�����������ϵK��r�������[14]��ϵ�y(t��ng)�͕�ֹͣӋ�r���Ĺ��������Ԝy�������ľ��x�����c���r��Ӌ�r�r�g�Ķ���֮һ�ij˷e����Ҋʽ��3.1��  (3.1) (3.1)
V�����ڿ՚���|(zh��)�У������������ٶȿ������Ƕ��r�����_ʼӋ�r��ֹͣӋ�r�ĕr�g���o̼С܇�y���b���O(sh��)Ӌ�˰��b������HC-SR04�������քe���b��С܇��܇�^����߅����߅�������45�Ƚ�.������0.02-4m�ķ�����(n��i)�M�Мy�����y���`���_��3mm���Ɇ�Ƭ�C�����_�|�l(f��)������Ƭ�C�l(f��)��10us�������ؽo�����������͕��l(f��)��40KHz�����������B�m(x��)�l(f��)�䣬�ڽ�(j��ng)�^�ϵK��ķ��������̖���ص������Ľ��ն˕r���������Ԅәz�y���D�dz����ĕr��l(f��)���^�̣� 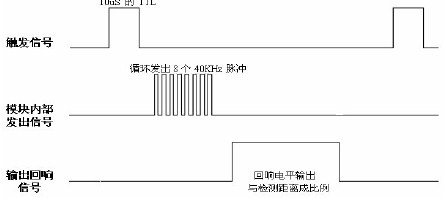
�D3.4 HC-SR04������̖�l(f��)���D ����늉���4.5-5.5v���܌���ܺͳ�����D(zhu��n)�� [15]���܉�l(f��)����D(zhu��n)�����b�ñ��Q���ǓQ��������������ʹ�õ���̖��HC-SR04�����y��������ģ�K���������Σ�ģ�K���ܷ�(w��n)�������x�y�����_ [16]���D�鳬��������ģ�Kϵ�y(t��ng)��(n��i)���Ĺ���ԭ��D�� 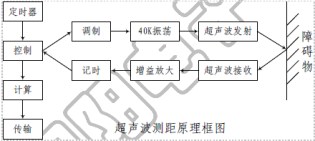
�D3.5 HC-SR04����ģ�Kϵ�y(t��ng)ԭ��D
�D3.5 HC-SR04����ģ�K�·ԭ��D 3.2.3 �ضșz�y�·���O(sh��)Ӌ �������ڿ՚��Ђ����ܜضȵ�Ӱ푱��^������߳����ɼ����x�Ĝʴ_�ԣ������˜ض��a��ģ�K��һ����r�£����������������ٶ��c�ضȵ�׃���ʬF(xi��n)���Ե��P(gu��n)ϵ���ض�����1�棬�����Ӽs��0��6m��s [17]�����՚��еĜض�׃�������^��ĕr�����ڿ՚���Ă������ٶ�Ҳ������(y��ng)�ĸ�׃�����ߵ��P(gu��n)ϵ���±��� ��3.1 ���ڿ՚��Ђ����c�ضȵ��P(gu��n)ϵ 
����ڿ��]�ضȵ���r�µ����ٶȿɽ����J�飺 
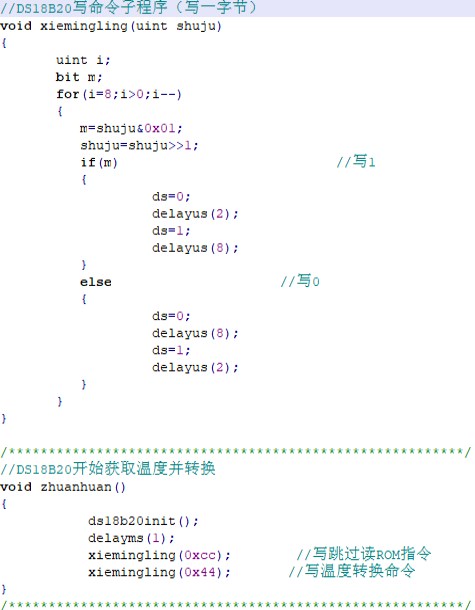
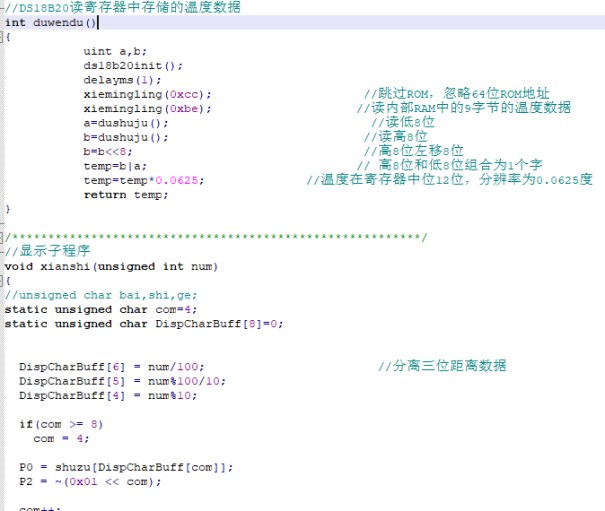
 �ڱ��n�}�У��x��DS18B20�ضȂ�����ģ�K���鱾ϵ�y(t��ng)�Ĝض��a����ԓģ�K���Мض�ָʾ�������ќض��������D(zhu��n)���锵(sh��)�����Կ�����ʽ��ݔ?sh��)���Ƭ�C��(n��i)�\�㣬DS18B20��Ϳ��Ԝy���ĜضȞ�����125��C����߿ɜy��125��C���y�����`����0.5��C,DS18B20�������������_�����քe��VCC����GND���͔�(sh��)��(j��)�����·�D���£� 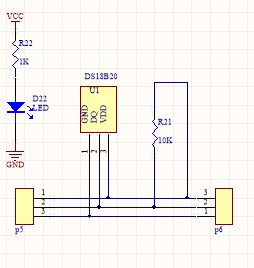
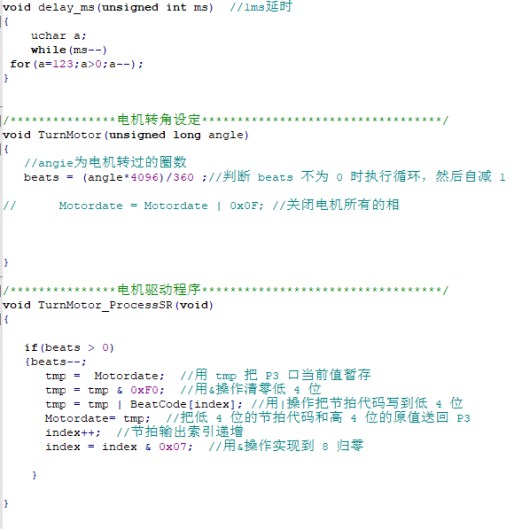
�D3.6 DS18B20�ضȂ�����ģ�Kԭ��D 3.2.4 �D(zhu��n)���b�õ��O(sh��)Ӌ �D(zhu��n)���O(sh��)Ӌ�þ��_�c��ֱ�ӛQ���@С܇�ɹ��@�^�ϵK���D(zhu��n)���b�õ��O(sh��)Ӌ�Y(ji��)��(g��u)��(y��ng)���ξo�����D(zhu��n)������С���D(zhu��n)��Ԫ�����x�ÿ��ƾ��ȑ�(y��ng)�^�ߣ������ƣ��܉�ݔ������Ť��ʹС܇�D(zhu��n)��ǰ݆�D(zhu��n)��.�ڱ��������С܇����ģ�д��õ��˶�C����C��һ�N�Ƕȿ��Ƶ��b�ã�����һ�Nݔ����(zh��)�ЙC��(g��u)����Cͨ�^��Ƭ�Cݔ��һ���r�g�ĕr���}�_��ͨ�^pwm�}�_�����{(di��o)�ƣ������}�_��ռ�ձȣ��Ϳ��Եõ�������(y��ng)�ĽǶȣ��M�����F(xi��n)܇݆���D(zhu��n)��.�����ڌ��H���Ƶĕr��C���̱��^���y���D(zhu��n)�ٵĿ����^�y�����O(sh��)Ӌ���D(zhu��n)�����Ԫ���x�ò��M늙C����늙Cݔ���Sͨ�^һ��(li��n)�S���B�ӵ�ǰ܇݆܇���ϣ�ͨ�^���O(sh��)Ӌ�õı����㷨�����Ʋ��M늙C�D(zhu��n)�^�ĽǶȡ����M늙C�Ĺ���ԭ���nj����̖�D(zhu��n)����һ���ǶȵĈ�(zh��)�ЙC��(g��u)�������m��(y��ng)���������ܭh(hu��n)��Ӱ��^С�����������^�����ף��ڱ����늿�ϵ�y(t��ng)�У�늙C�đ�(y��ng)����V���� �n�}������̖��28BYJ-48�IJ��M늙C����С܇���D(zhu��n)���b�Ä������@�N늙C�w�eС�����ƾ��ȸߣ��`��С���@�N늙C��������ʽ늙C���������Դ�������ĵķ�ʽͨ늣�늙C����Ҫ����(sh��)���±�:
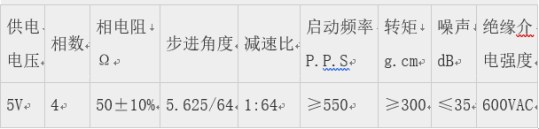
�D3.7 28BYJ-48���M늙C����(sh��)
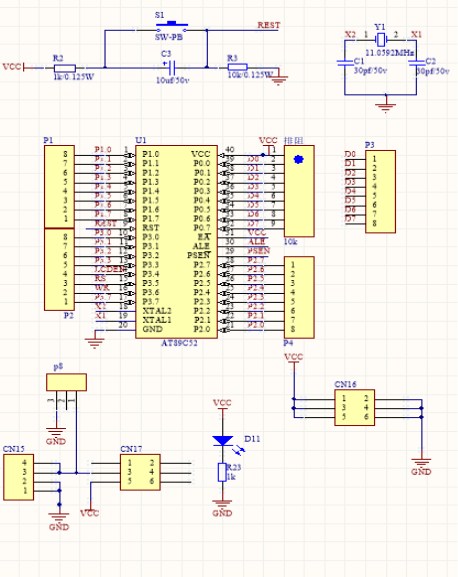
늙C��5v��늉��¹����������书��ݔ�������������^���������Ҫ�چ�Ƭ�C��늙C֮�g����һ��늙C�(q��)���·�����O(sh��)Ӌ������ULN2003늙C�(q��)���· ģ�K���(q��)���·ԭ��D���£� 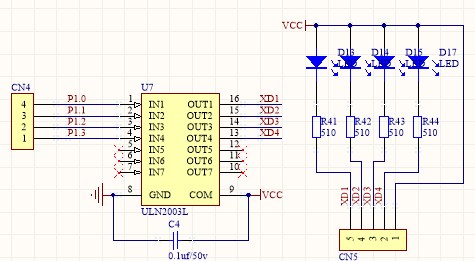
�D3.8 ULN2003늙C�(q��)��ģ�Kԭ��D �Æ�Ƭ�C��P1�ڵĵ���λ�քe�ӵ��(q��)���·��ݔ�����ݔ���˷քe�ӵ�늙C�Ă��ྀ���ӣ��Ϳ����(q��)��늙C�D(zhu��n)�ӡ����M늙C������ԭ��D���£� 
�D3.9 28BYJ-48���M늙C��(n��i)���Y(ji��)��(g��u)�D
28BYJ-48���M늙C��(n��i)���Ķ������а˂��X�������ăɂ��X��ͨ�^�@�M��(li��n)������һ�����Č����M�������࣬ÿһ��һ�˽��Դ��һ�νӵ�.�D(zhu��n)�����������X��ÿһ�������д��ԡ��乤��ԭ���Ǯ�B��ͨ늕r���ڴň����У��p���@�M���D(zhu��n)���X�l(f��)���D(zhu��n)�ӣ��˕r�D(zhu��n)�Ӄ��^�͕�������B��ăɂ��X���˕r�D(zhu��n)�ӵ�1�X�ă�߅���cC���γ�һ���ĽǶȡ�����B���Դ���_��C�������Դ�r���D(zhu��n)���ٴ��D(zhu��n)�ӣ�ʹ1�X��4�X����rᘷ����D(zhu��n)�ӣ��˕r1�X�ă�߅�֕�������c���@�M�ăɂ��X��ͬ��2�X�ă�߅�֕���D���@�M�ăɂ��X�γ�һ���ĊA�ǣ��Դ���ƣ�����ȽoB��ͨ늣�Ȼ����C�࣬�����D�࣬�����A�࣬�D(zhu��n)���D(zhu��n)�ӵķ���͕��෴�����@���D(zhu��n)�^�ĽǶȾ���һ������ǣ�ͨ�һ���D(zhu��n)���D(zhu��n)�^һ���ǶȞ�һ�ģ�ÿ��ֻͨ�һ�࣬�@�N��ʽ�Q������ģ���ͨ������һ�����ģ��D(zhu��n)���D(zhu��n)�^�ķ�������һ�����ӣ�����D(zhu��n)�^�˰˂����ӣ��@�r�D(zhu��n)�Ӿ��D(zhu��n)�^��һȦ���t��Ҫ32�ģ��D(zhu��n)���D(zhu��n)һ�����D(zhu��n)�ĽǶȾ��Dz���ǣ����y���������Ǟ� �� �� ���ͨ늷�ʽ�Ğ����ͬ�rͨ늣��t�����ăɽM�����X�����a(ch��n)����ͬ�Ĵň������˕r�D(zhu��n)���X���������������X�����������ăɂ��D(zhu��n)���X�B�������ľ��������ɂ������X�B�������ľ��������˕rÿͨ�һ�ģ��D(zhu��n)���D(zhu��n)�^�ĽǶȞ�ԭ�����ͨ��D(zhu��n)�^�Ƕȵ�һ�㣬��5.625�㣬�t�D(zhu��n)���D(zhu��n)�^һ�������X�t��Ҫ8�ģ��D(zhu��n)���D(zhu��n)�^һȦ����Ҫ64�ģ����ڃ���ͬ�rͨ늶��a(ch��n)�������g�ģ�����ԭ���Ć�����֮�g����һ�����������@�͕�����늙C��ݔ��Ť�ء�늙C�ڙCе�Y(ji��)��(g��u)����һ���ļ����ӣ����ӱȞ�1:64��Ҫʹ늙Cݔ���S�D(zhu��n)��һȦ���t��Ҫ�D(zhu��n)���D(zhu��n)�D(zhu��n)64Ȧ����Ҫͨ�64*64=4096��.28BYJ-48���M늙C����������l����늙C���ⲿ�Y(ji��)��(g��u)���D�� 
�D3.10 28BYJ-48���M늙C���^�D �t�������Դ�����ˣ���5v늉��������ij�ɫ���Sɫ���ۼtɫ���{ɫ�t����(y��ng)��ABCD
������ӣ�����Ҫʹijһ��ͨ늣������һ��ӵر�ɣ��ΰ���ģʽ��D�� 
�D3.11 28BYJ-48���M늙C����ʾ��D ����A���ͨ�r���t������(y��ng)�ӿڵĆ�Ƭ�C���_ݔ����ƽ��0�����ĵ�ͨ�ģʽ��(y��ng)ԓ��A-AB-B-BC-C-CD-D-DA,�B�m(x��)���Ƭ�Cݔ���@Щ��(sh��)��(j��)���Ϳ���늙C�B�m(x��)�D(zhu��n)�ӡ��������z�y���ϵK�r����(sh��)��(j��)�l(f��)�͵���Ƭ�C���|�l(f��)��Ƭ�C����(y��ng)����o��늙Cһ���Ć����l�ʣ�����(j��)�O(sh��)�����D(zhu��n)�^�ĽǶ��M�б��ϣ�늙Cݔ���S���D(zhu��n)�����}�_���l�ʛQ����ݔ��һ�����}�_����(sh��)�Ϳ���늙Cͣ���A(y��)�ڵ�λ�á� 3.2.5���Ϸ�ʽ���O(sh��)Ӌ �ڙC���˵ı����о��У����ƙC���˄����ķ������ض���·��Ҏ(gu��)�������_�������L�hĿ�� [18]���ڴ˱����O(sh��)Ӌ�У�Ҳ�ǰ���·��Ҏ(gu��)����˼���O(sh��)Ӌ�o̼С܇�ı����㷨�������㷨������늿�С܇�O(sh��)Ӌ�ú��ģ�Ҳ���O(sh��)Ӌ���y�c���ڱ����㷨�У�С܇�����w�ߴ磬ِ������r��С܇���ߵĠ�B(t��i)�����DZ����㷨���P(gu��n)�I��С܇����������ߠ�B(t��i)����С܇���S���cِ�������S���غϣ������ڌ��H�в�����ȫ�غϣ��@��Ҫ����늙C������С܇�������Ҫ�����ҳ����cِ���ľ��x�ֽ⣬�ֽ���cِ����ֱ��ƽ�еăɂ�������������D��
�D3.12 �����y����x�ֽ�D
�O(sh��)��һ��С܇���ϵK��İ�ȫ���xFS������(j��)��ȫ���x��ֵ���ж�С܇�Ƿ��D(zhu��n)�����҃ɂ�(c��)�ij����cِ���ķ������LcS��RcS��ֵ��һ�ӕr�������Q����С܇���ķ���l(f��)��ƫ�D(zhu��n)��С܇��ِ������Е����F(xi��n)�������N��r����һ�N��DaС܇���S���cِ�����S�����غϣ��ϵK��]����ȫ�ړ�ס������̽�y����������@�N��r����(d��o)�³�������̽�yä�^(q��)��С܇ǰ߅�ij����������ɼ���ِ����Ϣ��С܇���ϕ�ʧ�����ڶ��N��r��Db��С܇���xِ���ľ��x�����ϵK����L�ȣ��˕rС܇��ǰ�������w�o�ܞ�����Ҳ�Ͳ����D(zhu��n)���������S���c�ϵK��ľ��xԽ��Խ����LcS��RcS�IJ�ֵ��Խ��Խ�˕rС܇���l(f��)������Ҫ���D(zhu��n)��.�����N��r��Dc��С܇�cِ���ľ��xС��ِ���c���S���ľ��x���˕rǰ�˵ij���������ȫ�z�y���ϵK�ʹС܇�l(f��)���D(zhu��n)������С܇��һ���������S������  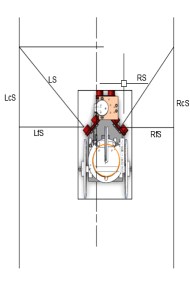
 ��a���������֜y�� ��b���������y�� ��c��������ȫ�z�y �D3.13 С܇���ψD
�Y(ji��)��ِ������r���@���N��r������(j��)�}ĿҪ���ϵK����80mm���ϵK�����L��Ҫ���ِ�����S��100-150mm������(j��)С܇���w���Ȟ�124mm������ʹǰ߅�ij������܉��R�e���ϵK��M��ʹС܇�M�������ِ�����g���O(sh��)�� LfS�cRfS�IJ�ֵ��һ��������(n��i)������������@�������������y���ֵ�������͵���Ƭ�C������늙C���D(zhu��n)�ǣ�ʹС܇�M��������ِ�����g�������ڰl(f��)���^���ƫ�D(zhu��n)�� 3.2.6 �����㷨���O(sh��)Ӌ ���˺���С܇�ı����㷨����ʹ늙C����С܇��ِ�����S�������w�㷨�^�����£� С܇�Č��Ȟ�124mm������ʹС܇�������D(zhu��n)��С܇���D(zhu��n)���돽�O(sh��)Ӌ�Դ�һЩ��С܇�ھ��ϵK����r���D(zhu��n)���돽����Щ�����x�h�t���돽С������ʹС܇�D(zhu��n)���ĕr������������l(f��)����(c��)�����ʿ��Ԍ���ȫ���x��С܇���P(gu��n)ϵ������(sh��)�W(xu��)ģ�ͣ�����һ������������(sh��)�� ����늙C�O(sh��)�����D(zhu��n)�^һ���ĽǶȺ����ĶȔ�(sh��)�֞�y�ݣ�x������ȫ���x��a����С܇�D(zhu��n)���r��ƽ���ȣ��Q����С܇�D(zhu��n)���Ƿ�ƽ��(w��n)��b��С܇���x�Ŀ���������С܇�c�ϵK��ľ��x�^С�r��������늙C̎�ڲ�����(y��ng)��B(t��i)���䔵(sh��)�W(xu��)ģ����D�� ����늙C�O(sh��)�����D(zhu��n)�^һ���ĽǶȺ����ĶȔ�(sh��)�֞�y�ݣ�x������ȫ���x��a����С܇�D(zhu��n)���r��ƽ���ȣ��Q����С܇�D(zhu��n)���Ƿ�ƽ��(w��n)��b��С܇���x�Ŀ���������С܇�c�ϵK��ľ��x�^С�r��������늙C̎�ڲ�����(y��ng)��B(t��i)���䔵(sh��)�W(xu��)ģ����D�� 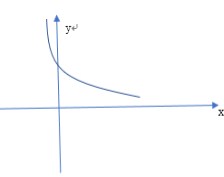
�D3.14 С܇���ψD �@�ӾͿ��Կ���늙C�D(zhu��n)����ƽ���ȡ���ِ����߅���ϵK��r�������O(sh��)��FS����С�D(zhu��n)����x��С܇ǰ���ij������x�ϵK�����ľ��x��S������ڛ]�������ϵK��r��LS=RS,����x����Ҳ��ȣ���С܇�^�m(x��)ǰ�M�����ϵK��r���˕r��Ƭ�C����늙C�l(f��)���D(zhu��n)���ָ��c��ͬ�r�����ҳ����c�ϵK����x�Ĵ�ֱ����LcS��RcS���M��һ����(sh��)ֵ�ı��^�����ϵK��ľ��xԽ��Խ���r�� LcS��RcS�IJ�ֵ������׃��LcS��Խ��ԽС��RcS�Ĕ�(sh��)ֵ��׃�����_��һ����ֵ������(n��i)����Ƭ�C�͕��ٴΰl(f��)�Ͱl(f��)��ָ���ǰ���İ�ȫ���x�����Ҿ��x�IJ�ֵ���M��l����늙C���_ʼ�D(zhu��n)�������F(xi��n)С܇�������D(zhu��n)��ʹС܇���ҷ��D(zhu��n)������D��

�D3.15 С܇�D(zhu��n)��
С܇�D(zhu��n)���r�����������D(zhu��n)�����r���P(gu��n)���������ٜy�����x��С܇������ǰ�����ߣ���(j��ng)�^�r�gt1�r��С܇�c��߅ِ���ľ��x�����ϵK���L�ȣ�늙C�֕�ʹС܇�l(f��)���D(zhu��n)��ʹС܇�����cƽ��ِ�����ߣ���(j��ng)�^�̕��ĕr�gt2��С܇��һ���D(zhu��n)��������ǰ�����ߣ���(j��ng)�^�r�gt3��С܇����ȫ�@�^�ϵK���˕r�������ӳ�����ʹС܇�ص�ِ�������S���ϣ��Դ�ԭ����С܇�����@�^�����ϵK�� С܇���ϵ�܉�E�����ڵ������� ��܉�E���D�� 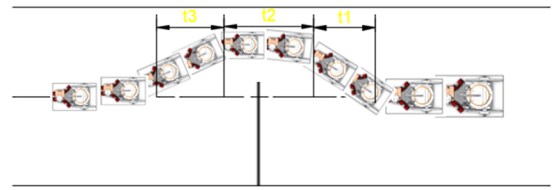
�D3.16 С܇�D(zhu��n)��܉�E t1��t2��t3�Ĕ�(sh��)ֵ�Ɍ��H�\�����{(di��o)ԇ�_���� 3.2.7 ��ָ̖ʾ�·���O(sh��)Ӌ ���˸�ֱ�^���^�쳬���Ĺ�����B(t��i)���O(sh��)Ӌ��һ�M6������ָʾ����ÿ��ָʾ���cһ�����ֵ��510�Wķ����裬ÿ��ָʾ��(y��ng)һ���������_�������˹�ꖘO�Ľӷ���ͨ�^��ָʾ�����^����Д೬���Ƿ���������������z�ޣ�ָʾ���·���£�
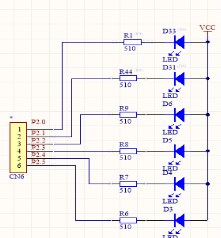
�D3.17 ����������B(t��i)ָʾ��
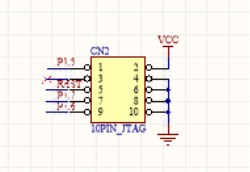
3.2.8 �������dģ�K�O(sh��)Ӌ ����̖֮����Ҫ�ѳ���һֱ����Ƭ�C�У�ʹϵ�y(t��ng)���������d�ڲ��Æ�Ƭ�C��Сϵ�y(t��ng)ģ�K�Ԏ���ISP���̟�䛷�ʽ���d���x�������(q��)���͵�USBASP���dģ�K��ԓ���d�����ð��b�(q��)�ӣ�ʹ��USB�ӿڹ�늣������˘˜ʵ�IDC10���_�ڣ�������X��͕��Ԅ��R�e���d�������d����.��ģ�KӲ���D�͆�Ƭ�C�B�ӈD���£�
�D3.18 IPS�������d�· 3.3 ܛ�����O(sh��)Ӌ ��Ӳ���O(sh��)Ӌ��֮����Ҫͨ�^һ����ָ��f(xi��)�{(di��o)����ģ�K�M�������Ĺ�����ܛ������c�Z�Ծ��̣�c�Z�ԑ�(y��ng)�ÏV������ֲ���^�����������������a(ch��n)���ĺ��ٵęC�����a�����\�Эh(hu��n)���ėl���^�ͣ�c�Z�Ա��^ͨ�ã���ϵ�y(t��ng)��ܛ�����_�l(f��)�����dz��V�đ�(y��ng)�á����ܶ࣬�����ܶ�Ĕ�(sh��)��(j��)��ͣ�����`���ľ���ָᘹ��ܣ��������˳���ָ���Ч�ʡ� ����Ӳ����Ҫ�IJ��־���ܛ�����O(sh��)Ӌ��ֻ���O(sh��)Ӌ�ÿ��Ƶ�ָ��ŕ�ʹӲ���l(f��)�]���ܣ���Ҫ��(j��ng)�^����(f��)���{(di��o)ԇԇ� [19]���ڱ�ܛ���O(sh��)Ӌ�У����˾��̷��㣬ʹ�x�߸��������⣬��˲���ģ�K�����̵�˼�룬������ϵ�y(t��ng)�֞飬��������ģ�K��늙C�(q��)�ӳ���ģ�K���ض�ģ�K�������պ�ij����{(di��o)ԇ�����w�����̈D���£�
3.4 �C�ϵ�y(t��ng)�İ��b�c�{(di��o)ԇ
�ڙCе���ֺ�늿ز��ֶ��O(sh��)Ӌ��֮�������nj��F(xi��n)���ı��Ϲ��ܣ���늿ظ�����ģ�K�M�b��֮�����ڙCе���ֵĽY(ji��)��(g��u)�o�������gС�����Ժ����İ��b늿�ģ�KҲ�Ƿdz���Ҫ�ģ��ڙC늲��ְ��b֮������ͨ�^���d�����d����Ƭ�C��(n��i)���Ƚo�·����ͨ늣��ڌ�С܇����ِ���У������{(di��o)ԇ���҃�߅�����cِ����߅�ľ��x�����r����늙C���D(zhu��n)�ǣ�ʹС܇�M����ِ�����g���ߣ�Ȼ��_��ǰ�������c�ϵK��İ�ȫ���x���_��С܇���D(zhu��n)���r�����c�ϵK����ײ���������x���D(zhu��n)�ǰ돽��������D(zhu��n)���^���У��������{(di��o)ԇС܇�@�^�ϵK�ĕr�g��

������Word��ʽ�ęn51�����d��ַ��
 �O(sh��)Ӌ�ęn.doc
(1.32 MB, ���d��(sh��): 24)
�O(sh��)Ӌ�ęn.doc
(1.32 MB, ���d��(sh��): 24)
2019-3-9 01:01 �ς�
�c���ļ������d����
���d�e��: �ڎ� -5
| 




 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664





 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��