|
|
51��Ƭ�C(j��)�R���Z�Լ�C�Z�Խ�(j��ng)�䌍(sh��)�� | ��(sh��)�(y��n)���n���O(sh��)Ӌ(j��) |
|
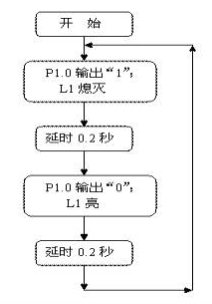
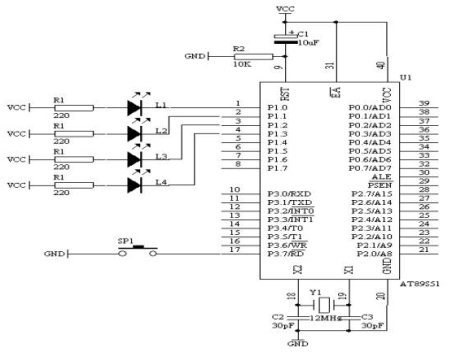
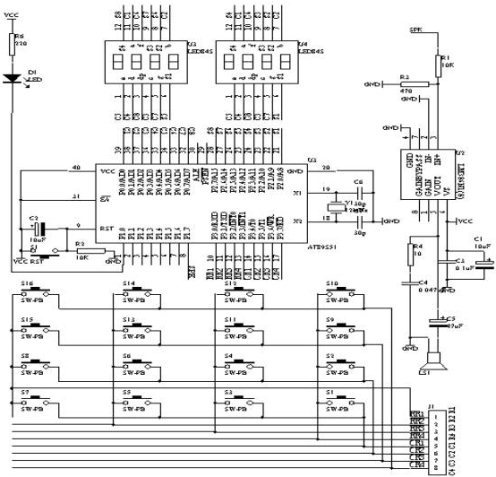
һ���W�q����D1 ��ʾ��һ���Ά�Ƭ�C(j��)ϵ�y(t��ng)ԭ��D���� P1.0 �˿��Ͻ�һ��(g��)�l(f��)����O�� L1��ʹ L1 �ڲ�ͣ��һ��һ�磬һ��һ��ĕr(sh��)�g�g���� 0.2 �롣 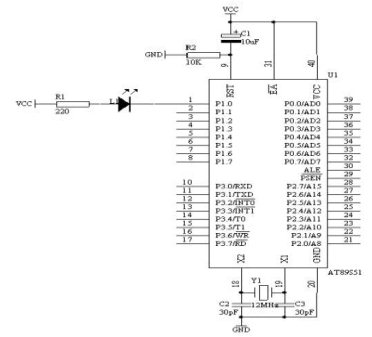
�ӕr(sh��)������O(sh��)Ӌ(j��)�����������Ƭ�C(j��)��ָ��Ĉ�(zh��)�еĕr(sh��)�g�Ạ̊́ܶ���(sh��)�����뼉����ˣ��҂�Ҫ����W�q�r(sh��)�g�g���� 0.2 �룬����������f�����̫�������҂��ڈ�(zh��)��ijһָ��r(sh��)�������ӕr(sh��)�����_(d��)���҂���Ҫ���@�ӵ��ӕr(sh��)�� ��������O(sh��)Ӌ(j��)�أ�������w��B��ԭ������D 4.1.1 ��ʾ��ʯӢ���w�� 12MHz����ˣ�1 ��(g��)�C(j��)�����ڞ� 1 �룬�C(j��)������ ����D 1 ��ʾ����(d��ng) P1.0 �˿�ݔ�����ƽ���� P1.0��1 �r(sh��)������(j��)�l(f��)����O�ܵĆ���?q��)���Կ�֪���@�r(sh��)�l(f��)����O�� L1 Ϩ�磻��(d��ng)P1.0 �˿�ݔ�����ƽ���� P1.0��0 �r(sh��)���l(f��)����O�� L1 �����҂�����ʹ�� SETB P1.0ָ��ʹ P1.0�˿�ݔ�����ƽ��ʹ�� CLR P1.0 ָ��ʹ P1.0 �˿�ݔ�����ƽ��
C �Z��Դ���� - #include <AT89X51.H>
- sbit L1=P1^0;
- void delay02s(void) //�ӕr(sh��) 0.2 ���ӳ���
- {
- unsigned char i,j,k;
- for(i=20;i>0;i--)
- for(j=20;j>0;j--)
- for(k=248;k>0;k--);
- }
- void main(void)
- {
- while(1)
- {
- L1=0;
- delay02s();
- L1=1;
- delay02s();
- }
�R��Դ���� - ORG 0
- START: CLR P1.0
- LCALL DELAY
- SETB P1.0
- LCALL DELAY
- LJMP START
- DELAY: MOV R5,#20 ;�ӕr(sh��)�ӳ����ӕr(sh��) 0.2 ��
- D1: MOV R6,#20
- D2: MOV R7,#248
- DJNZ R7,$
- DJNZ R6,D2
- DJNZ R5,D1
- RET
- END
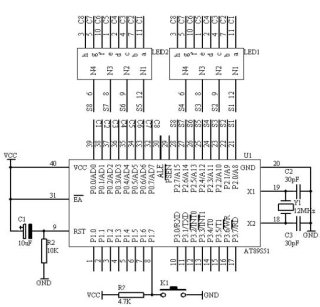
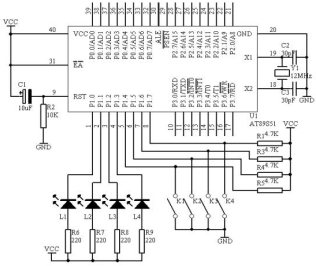
������·�_�P(gu��n)��B(t��i)ָʾ��D 3 ��ʾ��AT89S51 ��Ƭ�C(j��)�� P1.0��P1.3 ���Ă�(g��)�l(f��)����O�� L1��L4�� P1.4��P1.7 �����Ă�(g��)�_�P(gu��n) K1��K4�����̌��_�P(gu��n)�Ġ�B(t��i)��ӳ���l(f��)����O���ϡ� ���_�P(gu��n)�]�ϣ�����(y��ng)�ğ������_�P(gu��n)���_������(y��ng)�ğ��磩�� �����_�P(gu��n)��B(t��i)�z�y��������Ƭ�C(j��)���f����ݔ���P(gu��n)ϵ���҂���݆���z�yÿ��(g��)�_�P(gu��n)�� �B(t��i)������(j��)ÿ��(g��)�_�P(gu��n)�Ġ�B(t��i)����(y��ng)�İl(f��)����O��ָʾ�����Բ��� JB P1.X��REL �� JNB P1.X��REL ָ�����ɣ�Ҳ����һ���ԙz�y��·�_�P(gu��n)��B(t��i)��Ȼ����ָ ʾ�����Բ��� MOV A��P1 ָ��һ�ΰ� P1 �˿ڵĠ�B(t��i)ȫ���x�룬Ȼ��ȡ�� 4 λ�Ġ�B(t��i)��ָʾ�� ����1���R��Դ���� ORG 00H START: MOV A,P1 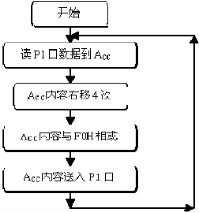
ANL A,#0F0H RR A RR A RR A RR A ORL A,#0F0H MOV P1,A SJMP START END
����1��C�Z�Գ��� #INClude <AT89X51.H> unsigned char temp;
void main(void) { while(1) { temp=P1>>4; temp=temp | 0xf0; P1=temp; } } ����2���R��Դ���� ORG 00H START: JB P1.4,NEXT1 CLR P1.0 SJMP NEX1
NEXT1: SETB P1.0 NEX1: JB P1.5,NEXT2 CLR P1.1 SJMP NEX2 NEXT2: SETB P1.1 NEX2: JB P1.6,NEXT3 CLR P1.2 SJMP NEX3 NEXT3: SETB P1.2 NEX3: JB P1.7,NEXT4 CLR P1.3 SJMP NEX4 NEXT4: SETB P1.3 NEX4: SJMP START END ����2��C �Z��Դ����  #INClude <AT89X51.H>
void main(void) { while(1) { if(P1_4==0) { P1_0=0; } Else { P1_0=1; } if(P1_5==0) { P1_1=0; } else 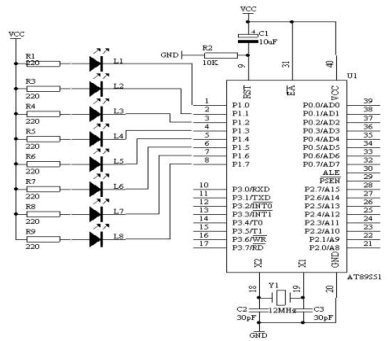 { P1_1=1; } if(P1_6==0) { P1_2=0; } else { P1_2=1; } if(P1_7==0) { P1_3=0; } else �����V������O(sh��)Ӌ(j��)����ȡ���ķ�����ʹ�˿� P1 ����һ����׃�������� 2 �Σ����� 2 �Σ��W�q 2 �� ���ӕr(sh��)�ĕr(sh��)�g 0.2 �룩�� ���� MOV DPTR����DATA16 ��ָ���ʹ��(sh��)��(j��)ָᘼĴ���ָ�������_ �^�� ���� MOVC A����A��DPTR ��ָ�����(j��)�ۼ�����ֵ�ټ��� DPTR �� ֵ���Ϳ���ʹ����Ӌ(j��)��(sh��)�� PC ָ�������(n��i)��Ҫȡ���Ĕ�(sh��)��(j��)����ˣ�ֻҪ�ѿ��ƴa����һ��(g��)���������� MOVC A����A��DPTR ��ȡ�a�IJ����� 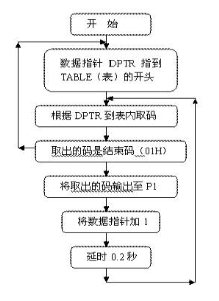 �Ϳɷ����̎��һЩ��(f��)�s�Ŀ��Ƅ�����ȡ���^�����D��ʾ�� �R��Դ���� ORG 0 START: MOV DPTR,#TABLE LOOP: CLR A MOVC A,@A+DPTR CJNE A,#01H,LOOP1 JMP START LOOP1: MOV P1,A MOV R3,#20 LCALL DELAY INC DPTR JMP LOOP DELAY: MOV R4,#20 D1: MOV R5,#248  DJNZ R5,$ DJNZ R4,D1 DJNZ R3,DELAY R RET T ABLE: DB 0FEH,0FDH,0FBH,0F7H DB 0EFH,0DFH,0BFH,07FH DB 0FEH,0FDH,0FBH,0F7H DB 0EFH,0DFH,0BFH,07FH DB 07FH,0BFH,0DFH,0EFH DB 0F7H,0FBH,0FDH,0FEH DB 07FH,0BFH,0DFH,0EFH DB 0F7H,0FBH,0FDH,0FEH DB 00H, 0FFH,00H, 0FFH DB 01H END C �Z��Դ���� #INClude <AT89X51.H> unsigned char code table[]={0xfe,0xfd,0xfb,0xf7, 0xef,0xdf,0xbf,0x7f,0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f, 0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe,0x7f,0xbf,0xdf,0xef, 0xf7,0xfb,0xfd,0xfe,0x00,0xff,0x00,0xff,0x01}; unsigned char i; void delay(void) { unsigned char m,n,s; for(m=20;m>0;m--) for(n=20;n>0;n--) for(s=248;s>0;s--); } void main(void) { while(1) { if(table[ i]!=0x01) { P1=table[ i]; i++; delay(); } else { i=0; } } }
�ġ� 00��59 ��Ӌ(j��)�r(sh��)�����D8��ʾ���� AT89S51 ��Ƭ�C(j��)�� P0 �� P2 �˿ڷքe���Ѓɂ�(g��)��ꎔ�(sh��)�a�ܣ�P0 ���(q��)���@ʾ��ĕr(sh��)�g��ʮλ���� P2 ���(q��)���@ʾ��ĕr(sh��)�g�Ă�(g��)λ�����O(sh��)Ӌ(j��)�^�����҂���һ��(g��)�惦��Ԫ������Ӌ(j��)��(sh��)��Ԫ����(d��ng)һ��犵���r(sh��)������Ӌ(j��)��(sh��)��Ԫ�� 1����(d��ng)��Ӌ(j��)��(sh��)�_(d��)�� 60 �r(sh��)�����Ԅӷ��ص� 0��������Ӌ(j��)��(sh��)�� ������Ӌ(j��)��(sh��)��Ԫ�еĔ�(sh��)��(j��)Ҫ����ʮλ��(sh��)�͂�(g��)λ��(sh��)���_�������Բ��Ì� 10 �����͌� 10 ���ࡣ �R��Դ���� Second EQU 30H ORG 0000H 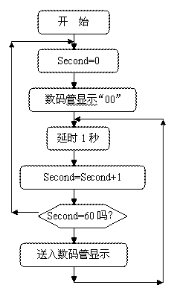 START: MOV Second, #00H NEXT: MOV A, Second MOV B,#10 DIV AB MOV DPTR,#TABLE MOVC A,@A+DPTR MOV P0,A MOV A,B MOVC A,@A+DPTR MOV P2,A LCALL DELY1S INC Second MOV A,Second CJNE A,#60,NEXT  LJMP START 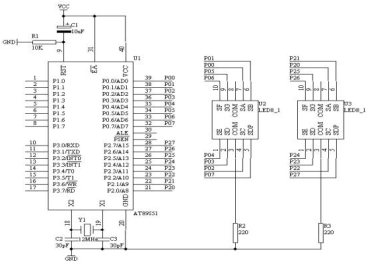 DELY1S: MOV R5,#100 D2: MOV R6,#20 D1: MOV R7,#248 DJNZ R7,$ DJNZ R6,D1 DJNZ R5,D2 RET TABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH END
C �Z��Դ���� #include <AT89X51.H> unsigned char code table[]={0x3f,0x06,0x5b,0x4f,0x66, 0x6d,0x7d,0x07,0x7f,0x6f}; unsigned char Second; void delay1s(void) { unsigned char i,j,k; for(k=100;k>0;k--) for(i=20;i>0;i--) for(j=248;j>0;j--); } void main(void) { Second=0; P0=table[Second/10]; P2=table[Second%10]; while(1) { delay1s(); Second++; if(Second==60) { Second=0; } P0=table[Second/10]; P2=table[Second%10]; } }

 �塢�ӑB(t��i)��(sh��)�a�@ʾ���g(sh��) �塢�ӑB(t��i)��(sh��)�a�@ʾ���g(sh��)��D 9 ��ʾ��P0 �˿ڽӄӑB(t��i)��(sh��)�a�ܵ����δa�P�Σ�P2 �˿ڽӄӑB(t��i)��(sh��)�a�ܵĔ�(sh��)λ�x��ˣ�P1.7�� һ��(g��)�_�P(gu��n)����(d��ng)�_�P(gu��n)�Ӹ��ƽ�r(sh��)���@ʾ��12345���֘ӣ���(d��ng)�_�P(gu��n)�ӵ��ƽ�r(sh��)���@ʾ��HELLO���֘ӡ� �ӑB(t��i)���跽�����ӑB(t��i)�ӿڲ��ø���(sh��)�a��ѭ�h(hu��n)݆���@ʾ�ķ�������(d��ng)ѭ�h(hu��n)�@ʾ�l���^�ߕr(sh��)���������۵ĕ������ԣ��������W�q�@ʾ�F(xi��n)���@�N�@ʾ��Ҫһ��(g��)�ӿ�������δa��ݔ���������x����һ�ӿ���ɸ���(sh��)�a�ܵ�݆���c(di��n)������(sh��)λ�x�� ���M(j��n)�Д�(sh��)�a�@ʾ�ĕr(sh��)��Ҫ���@ʾ��Ԫ�_�� 8 ��(g��)�@ʾ���_�^(q��)��ÿ��(g��)�@ʾ���_�^(q��)�b���@ʾ�IJ�ͬ��(sh��)��(j��)���ɡ������@ʾ�����δa��(sh��)��(j��)�҂����ò����������ɡ�
�R��Դ����  ORG 0000H START: JB P1.7,DIR1 MOV DPTR,#TABLE1 SJMP DIR DIR1: MOV DPTR,#TABLE2 DIR: MOV R0,#00H MOV R1,#01H NEXT: MOV A,R0 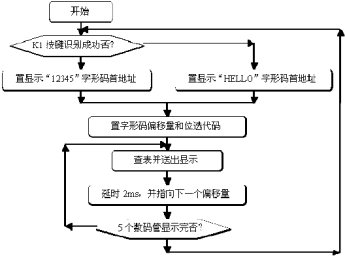 MOVC A,@A+DPTR MOV P0,A MOV A,R1 MOV P2,A LCALL DAY INC R0 RL A MOV R1,A CJNE R1,#0DFH,NEXT SJMP START DAY: MOV R6,#4 D1: MOV R7,#248 DJNZ R7,$ DJNZ R6,D1  RET TABLE1: DB 06H,5BH,4FH,66H,6DH TABLE2: DB 78H,79H,38H,38H,3FH END
C �Z��Դ���� - #include <AT89X51.H>
- Unsigned char code table1[ ]={0x06,0x5b,0x4f,0x66,0x6d};
- Unsigned char code table2[]={0x78,0x79,0x38,0x38,0x3f};
- Unsigned char i��
- Unsigned char a��b��
- Unsigned char temp��
- void main(void)
- {
- while(1)
- {
- temp=0xfe;
- for(i=0;i<5;i++)
- {
- if(P1_7==1)
- {
- P0=table1[ i];
- }
- else
- {
- P0=table2[ i];
- }
- P2=temp;
- a=temp<<(i+1);
- b=temp>>(7-i);
- temp=a|b;
- for(a=4;a>0;a--)
- for(b=248;b>0;b--);
- }
- }
����4��4 ���ʽ�I�P�R�e���g(sh��)��D 11 ��ʾ���� AT89S51 �IJ��п� P1 �� 4��4 ����I�P���� P1.0��P1.3��ݔ�뾀���� P1.4��P1.7 ��ݔ�������ڔ�(sh��)�a�����@ʾÿ��(g��)���I�ġ�0��F������(y��ng)�İ��I����̖������D12 ��ʾÿ��(g��)���I��������ֵ����ֵ ����ֵ����ֵ�ĽM�Ͼ����R�e�@��(g��)���I�ľ��a����ꇵ��о����о��քeͨ�^�ɲ��нӿں� CPU ͨ�š�ÿ��(g��)���I�Ġ�B(t��i)ͬ����׃�ɔ�(sh��)������0���͡�1�����_�P(gu��n)��һ�ˣ��о���ͨ�^���� VCC�����ӵ���ͨ�^����ݔ����(sh��)�֡�0����(sh��)�F(xi��n)�ġ��I�P̎��������΄�(w��)�ǣ��_���Пo�I���£��Д���һ��(g��)�I���£��I�Ĺ�����ʲô�� 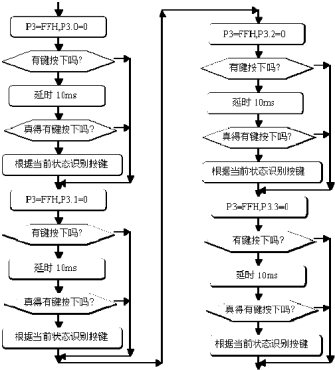 ߀Ҫ�������I���]�ϻ���_�r(sh��)�Ķ��ӡ��ɂ�(g��)���п��У�һ��(g��)ݔ������a��ʹ���I���ЄӑB(t��i)�ӵأ���һ��(g��)���п�ݔ�밴�I��B(t��i)�����В���ֵ�ͻ�����̖��ͬ�γ��I���a���R�e���I��ͨ�^ܛ����������ԓ�I�� ���ܡ� 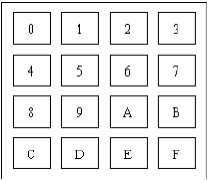 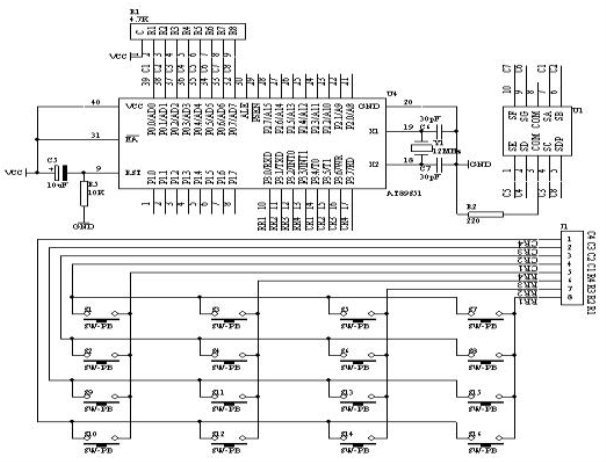
�R��Դ���� - KEYBUF EQU 30H
- ORG 00H
- START: MOV KEYBUF,#2
- WAIT:
- MOV P3,#0FFH
- CLR P3.4
- MOV A,P3
- ANL A,#0FH
- XRL A,#0FH
- JZ NOKEY1
- LCALL DELY10MS
- MOV A,P3
- ANL A,#0FH
- XRL A,#0FH
- JZ NOKEY1
- MOV A,P3
- ANL A,#0FH
- CJNE A,#0EH,NK1
- MOV KEYBUF,#0
- LJMP DK1
- NK1: CJNE A,#0DH,NK2
- MOV KEYBUF,#1
- LJMP DK1
- NK2: CJNE A,#0BH,NK3
- MOV KEYBUF,#2
- LJMP DK1
- NK3: CJNE A,#07H,NK4
- MOV KEYBUF,#3
- LJMP DK1
- NK4: NOP
- DK1:
- MOV A,KEYBUF
- MOV DPTR,#TABLE
- MOVC A,@A+DPTR
- MOV P0,A
- DK1A: MOV A,P3
- ANL A,#0FH
- XRL A,#0FH
- JNZ DK1A
- NOKEY1:
- MOV P3,#0FFH
- CLR P3.5
- MOV A,P3
- ANL A,#0FH
- XRL A,#0FH
- JZ NOKEY2
- LCALL DELY10MS
- MOV A,P3
- ANL A,#0FH
- XRL A,#0FH
- JZ NOKEY2
- MOV A,P3
- ANL A,#0FH
- CJNE A,#0EH,NK5
- MOV KEYBUF,#4
- LJMP DK2
- NK5: CJNE A,#0DH,NK6
- MOV KEYBUF,#5
- LJMP DK2
- NK6: CJNE A,#0BH,NK7
- MOV KEYBUF,#6
- LJMP DK2
- NK7: CJNE A,#07H,NK8
- MOV KEYBUF,#7
- LJMP DK2
- NK8: NOP
- DK2:
- MOV A,KEYBUF
- MOV DPTR,#TABLE
- MOVC A,@A+DPTR
- MOV P0,A
- DK2A: MOV A,P3
- ANL A,#0FH
- XRL A,#0FH
- JNZ DK2A
- NOKEY2:
- MOV P3,#0FFH
- CLR P3.6
- MOV A,P3
- ANL A,#0FH
- XRL A,#0FH
- JZ NOKEY3
- LCALL DELY10MS
- MOV A,P3
- ANL A,#0FH
- XRL A,#0FH
- JZ NOKEY3
- MOV A,P3
- ANL A,#0FH
- CJNE A,#0EH,NK9
- MOV KEYBUF,#8
- LJMP DK3
- NK9: CJNE A,#0DH,NK10
- MOV KEYBUF,#9
- LJMP DK3
- NK10: CJNE A,#0BH,NK11
- MOV KEYBUF,#10
- LJMP DK3
- NK11: CJNE A,#07H,NK12
- MOV KEYBUF,#11
- LJMP DK3
- NK12: NOP
- DK3:
- MOV A,KEYBUF
- MOV DPTR,#TABLE
- MOVC A,@A+DPTR
- MOV P0,A
- DK3A: MOV A,P3
- ANL A,#0FH
- XRL A,#0FH
- JNZ DK3A
- NOKEY3:
- MOV P3,#0FFH
- CLR P3.7
- MOV A,P3
- ANL A,#0FH
- XRL A,#0FH
- JZ NOKEY4
- LCALL DELY10MS
- MOV A,P3
- ANL A,#0FH
- XRL A,#0FH
- JZ NOKEY4
- MOV A,P3
- ANL A,#0FH
- CJNE A,#0EH,NK13
- MOV KEYBUF,#12
- LJMP DK4
- NK13: CJNE A,#0DH,NK14
- MOV KEYBUF,#13
- LJMP DK4
- NK14: CJNE A,#0BH,NK15
- MOV KEYBUF,#14
- LJMP DK4
- NK15: CJNE A,#07H,NK16
- MOV KEYBUF,#15
- LJMP DK4
- NK16: NOP
- DK4:
- MOV A,KEYBUF
- MOV DPTR,#TABLE
- MOVC A,@A+DPTR
- MOV P0,A
- DK4A: MOV A,P3
- ANL A,#0FH
- XRL A,#0FH
- JNZ DK4A
- NOKEY4:
- LJMP WAIT
- DELY10MS:
- MOV R6,#10
- D1: MOV R7,#248
- DJNZ R7,$
- DJNZ R6,D1
- RET
- TABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H
- DB 7FH,6FH,77H,7CH,39H,5EH,79H,71H
- END
C �Z��Դ���� - #INClude <AT89X51.H>
- unsigned char code table[]={0x3f,0x06,0x5b,0x4f,
- 0x66,0x6d,0x7d,0x07,
- 0x7f,0x6f,0x77,0x7c,
- 0x39,0x5e,0x79,0x71};
- unsigned char temp;
- unsigned char key;
- unsigned char i,j;
- void main(void)
- {
- while(1)
- {
- P3=0xff;
- P3_4=0;
- temp=P3;
- temp=temp & 0x0f;
- if (temp!=0x0f)
- {
- for(i=50;i>0;i--)
- for(j=200;j>0;j--);
- temp=P3;
- temp=temp & 0x0f;
- if (temp!=0x0f)
- {
- temp=P3;
- temp=temp & 0x0f;
- switch(temp)
- {
- case 0x0e:
- key=7;
- break;
- case 0x0d:
- key=8;
- break;
- case 0x0b:
- key=9;
- break;
- case 0x07:
- key=10;
- break;
- }
- temp=P3;
- P1_0=~P1_0;
- P0=table[key];
- temp=temp & 0x0f;
- while(temp!=0x0f)
- {
- temp=P3;
- temp=temp & 0x0f;
- }
- }
- }
- P3=0xff;
- P3_5=0;
- temp=P3;
- temp=temp & 0x0f;
- if (temp!=0x0f)
- {
- for(i=50;i>0;i--)
- for(j=200;j>0;j--);
- temp=P3;
- temp=temp & 0x0f;
- if (temp!=0x0f)
- {
- temp=P3;
- temp=temp & 0x0f;
- switch(temp)
- {
- case 0x0e:
- key=4;
- break;
- case 0x0d:
- key=5;
- break;
- case 0x0b:
- key=6;
- break;
- case 0x07:
- key=11;
- break;
- }
- temp=P3;
- P1_0=~P1_0;
- P0=table[key];
- temp=temp & 0x0f;
- while(temp!=0x0f)
- {
- temp=P3;
- temp=temp & 0x0f;
- }
- }
- }
- P3=0xff;
- P3_6=0;
- temp=P3;
- temp=temp & 0x0f;
- if (temp!=0x0f)
- {
- for(i=50;i>0;i--)
- for(j=200;j>0;j--);
- temp=P3;
- temp=temp & 0x0f;
- if (temp!=0x0f)
- {
- temp=P3;
- temp=temp & 0x0f;
- switch(temp)
- {
- case 0x0e:
- key=1;
- break;
- case 0x0d:
- key=2;
- break;
- case 0x0b:
- key=3;
- break;
- case 0x07:
- key=12;
- break;
- }
- temp=P3;
- P1_0=~P1_0;
- P0=table[key];
- temp=temp & 0x0f;
- while(temp!=0x0f)
- {
- temp=P3;
- temp=temp & 0x0f;
- }
- }
- }
- P3=0xff;
- P3_7=0;
- temp=P3;
- temp=temp & 0x0f;
- if (temp!=0x0f)
- {
- for(i=50;i>0;i--)
- for(j=200;j>0;j--);
- temp=P3;
- temp=temp & 0x0f;
- if (temp!=0x0f)
- {
- temp=P3;
- temp=temp & 0x0f;
- switch(temp)
- {
- case 0x0e:
- key=0;
- break;
- case 0x0d:
- key=13;
- break;
- case 0x0b:
- key=14;
- break;
- case 0x07:
- key=15;
- break;
- }
- temp=P3;
- P1_0=~P1_0;
- P0=table[key];
- temp=temp & 0x0f;
- while(temp!=0x0f)
- {
- temp=P3;
- temp=temp & 0x0f;
- }
- }
- }
- }
- }
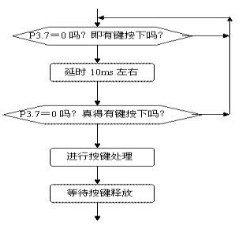
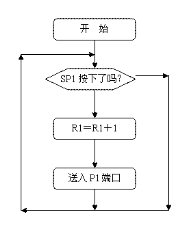
�ߡ����I�R�e����ÿ����һ���_�P(gu��n) SP1��Ӌ(j��)��(sh��)ֵ�� 1��ͨ�^AT89S51 ��Ƭ�C(j��)�� P1 �˿ڵ� P1.0 �� P1.3 �@ʾ������M(j��n)��Ӌ(j��)��(sh��)ֵ�� *�����O(sh��)Ӌ(j��)����������һ��(g��)���I�ě]�а��µ������Լ�ጷ���һ��(g��)�������^�̣�Ҳ�����f����(d��ng)�҂�����һ��(g��)���I�r(sh��)����ϣ��ij��(g��)����ֻ��(zh��)��һ�Σ����ڰ��I���µ� �^���У���Ҫ�иɔ_�M(j��n)������?y��n)飬�ڰ��µ��^���У�һ���иɔ_�^������������`�|�l(f��)�^�̣��@�������҂�����Ҫ�ġ�����ڰ��I���µĕr(sh��)��,Ҫ���҂����ϵĸɔ_��̖�Լ����I�ęC(j��)е���|�ȸɔ_��̖�o�V������һ����r�£��҂����Բ�����݁�V�����@Щ�ɔ_��̖������(sh��)�H�ϣ�������Ӳ���ɱ���Ӳ���·���w�e���@���҂���ϣ���������Ђ�(g��)�k����Q�@��(g��)���}������҂����Բ���ܛ���V���ķ���ȥ���@Щ�ɔ_��̖��һ����r�£�һ��(g��)���I���µĕr(sh��)�����ڰ��µĕr(sh��)�̴�����һ���ĸɔ_��̖������֮��ͻ������M(j��n)���˷�(w��n)���Ġ�B(t��i)�����w��һ��(g��)���I�İ��µ�ጷŵ�ȫ�^�̵���̖�D���ψD��ʾ���ĈD�п��Կ������҂��ڳ����O(sh��)Ӌ(j��)�r(sh��)���İ��I���R�e����֮���ӕr(sh��) 5ms ���ϣ��Ķ����_�˸ɔ_��̖�^(q��)���҂��ف�z�yһ�Σ������I�Ƿ�����ѽ�(j��ng)���£�������ѽ�(j��ng)���£��@�r(sh��)�϶�ݔ������ƽ�����@�r(sh��)�z�y�����Ǹ��ƽ���C�����������ڸɔ_��̖������`�|�l(f��)��CPU ���J(r��n)�����`�|�l(f��)��̖���ᗉ�@�εİ��I�R�e�^�̡��Ķ������ϵ�y(t��ng)�Ŀɿ��ԡ� ����Ҫ��ÿ����һ�Σ������(zh��)��һ�Σ�ֱ����һ���ٰ��µĕr(sh��)���و�(zh��)��һ�������ˏİ��I���R�e����֮���҂��Ϳ��Ԉ�(zh��)���@�ε��������Ҫ��һ��(g��)�ȴ����Iጷŵ��^�̣��@Ȼጷŵ��^�̣�����ʹ��֏�(f��)�ɸ��ƽ��B(t��i)��
1�� �R��Դ����
ORG 0000H START: MOV R1,#00H ;��ʼ�� R1 �� 0����ʾ�� 0 �_ʼӋ(j��)��(sh��) MOV A, R1 ; CPL A ;ȡ��ָ�� MOV P1,A ;�ͳ� P1 �˿��ɰl(f��)����O���@ʾ REL: JB P3.7,REL ;�Д� SP1 �Ƿ��� LCALL DELAY10MS ;�����£��t�ӕr(sh��) 10ms ���� JB P3.7,REL ;���Д� SP1 �Ƿ���ð��� INC R1 ;���_��(sh��)���£��t�M(j��n)�а��I̎����ʹ MOV A,R1 ;Ӌ(j��)��(sh��)��(n��i)�ݼ� 1�����ͳ� P1 �˿��� CPL A ;�l(f��)����O���@ʾ MOV P1,A ; JNB P3.7,$ ;�ȴ� SP1 ጷ� SJMP REL ;�^�m(x��)�� K1 ���I���� DELAY10MS: MOV R6,#20 ;�ӕr(sh��) 10ms �ӳ��� L1: MOV R7,#248 DJNZ R7,$ DJNZ R6,L1 RET END
2. C �Z��Դ����
#include <AT89X51.H> unsigned char count; void delay10ms(void) { unsigned char i,j; for(i=20;i>0;i--) for(j=248;j>0;j--); } void main(void) { while(1) { if(P3_7==0) { delay10ms(); if(P3_7==0) { count++; if(count==16) { count=0; } P1=~count; while(P3_7==0); } } } }
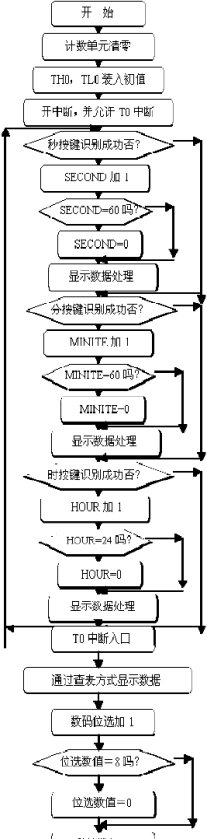 ������(sh��)��� ������(sh��)�����1�� �_�C(j��)�r(sh��)���@ʾ 12��00��00 �ĕr(sh��)�g�_ʼӋ(j��)�r(sh��)�� ��2�� P0.0/AD0 ���ơ��롱���{(di��o)����ÿ��һ�μ� 1 �룻 ��3�� P0.1/AD1 ���ơ��֡����{(di��o)����ÿ��һ�μ� 1 �֣� 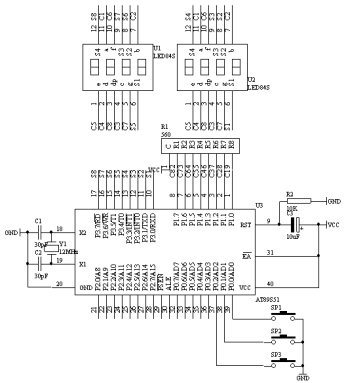 ��4�� P0.2/AD2 ���ơ��r(sh��)�����{(di��o)����ÿ��һ�μ� 1 ��(g��)С�r(sh��)
6�� �R��Դ���� SECOND EQU 30H MINITE EQU 31H HOUR EQU 32H HOURK BIT P0.0 MINITEK BIT P0.1 SECONDK BIT P0.2 DISPBUF EQU 40H DISPBIT EQU 48H T2SCNTA EQU 49H T2SCNTB EQU 4AH TEMP EQU 4BH ORG 00H LJMP START ORG 0BH LJMP INT_T0 START: MOV SECOND,#00H MOV MINITE,#00H MOV HOUR,#12 MOV DISPBIT,#00H MOV T2SCNTA,#00H MOV T2SCNTB,#00H MOV TEMP,#0FEH LCALL DISP MOV TMOD,#01H MOV TH0,#(65536-2000) / 256 MOV TL0,#(65536-2000) MOD 256 SETB TR0 SETB ET0 SETB EA WT: JB SECONDK,NK1 LCALL DELY10MS JB SECONDK,NK1 INC SECOND MOV A,SECOND CJNE A,#60,NS60 MOV SECOND,#00H NS60: LCALL DISP JNB SECONDK,$ NK1: JB MINITEK,NK2 LCALL DELY10MS JB MINITEK,NK2 INC MINITE MOV A,MINITE CJNE A,#60,NM60 MOV MINITE,#00H NM60: LCALL DISP JNB MINITEK,$ NK2: JB HOURK,NK3 LCALL DELY10MS JB HOURK,NK3 INC HOUR MOV A,HOUR CJNE A,#24,NH24 MOV HOUR,#00H NH24: LCALL DISP JNB HOURK,$ NK3: LJMP WT DELY10MS: MOV R6,#10 D1: MOV R7,#248 DJNZ R7,$ DJNZ R6,D1 RET DISP: MOV A,#DISPBUF ADD A,#8 DEC A MOV R1,A MOV A,HOUR MOV B,#10 DIV AB MOV @R1,A DEC R1 MOV A,B MOV @R1,A DEC R1 MOV A,#10 MOV@R1,A DEC R1 MOV A,MINITE MOV B,#10 DIV AB MOV @R1,A DEC R1 MOV A,B MOV @R1,A DEC R1 MOV A,#10 MOV@R1,A DEC R1 MOV A,SECOND MOV B,#10 DIV AB MOV @R1,A DEC R1 MOV A,B MOV @R1,A DEC R1 RET INT_T0: MOV TH0,#(65536-2000) / 256 MOV TL0,#(65536-2000) MOD 256 MOV A,#DISPBUF ADD A,DISPBIT MOV R0,A MOV A,@R0 MOV DPTR,#TABLE MOVC A,@A+DPTR MOV P1,A MOV A,DISPBIT MOV DPTR,#TAB MOVC A,@A+DPTR MOV P3,A INC DISPBIT MOV A,DISPBIT CJNE A,#08H,KNA MOV DISPBIT,#00H KNA: INC T2SCNTA MOV A,T2SCNTA CJNE A,#100,DONE MOV T2SCNTA,#00H INC T2SCNTB MOV A,T2SCNTB CJNE A,#05H,DONE MOV T2SCNTB,#00H INC SECOND MOV A,SECOND CJNE A,#60,NEXT MOV SECOND,#00H INC MINITE MOV A,MINITE CJNE A,#60,NEXT MOV MINITE,#00H INC HOUR MOV A,HOUR CJNE A,#24,NEXT MOV HOUR,#00H NEXT: LCALL DISP DONE: RETI TABLE: DB 3FH,06H,5BH,4FH,66H,6DH, 7DH,07H,7FH,6FH,40H TAB: DB 0FEH,0FDH,0FBH,0F7H,0EFH, 0DFH,0BFH,07FH END
7�� C �Z��Դ���� #INClude <AT89X51.H> unsigned char code dispcode[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71,0x00}; unsigned char dispbitcode[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f}; unsigned char dispbuf[8]={0,0,16,0,0,16,0,0}; unsigned char dispbitcnt; unsigned char second; unsigned char minite; unsigned char hour; unsigned int tcnt; unsigned char mstcnt; unsigned char i,j; void main(void) { TMOD=0x02; TH0=0x06; TL0=0x06; TR0=1; ET0=1; EA=1; while(1) { if(P0_0==0) { for(i=5;i>0;i--) for(j=248;j>0;j--); if(P0_0==0) { second++; if(second==60) { second=0; } dispbuf[0]=second%10; dispbuf[1]=second/10; while(P0_0==0); } } if(P0_1==0) { for(i=5;i>0;i--) for(j=248;j>0;j--); if(P0_1==0) { minite++; if(minite==60) { minite=0; } dispbuf[3]=minite%10; dispbuf[4]=minite/10; while(P0_1==0); } } if(P0_2==0) { for(i=5;i>0;i--) for(j=248;j>0;j--); if(P0_2==0) { hour++; if(hour==24) { hour=0; } dispbuf[6]=hour%10; dispbuf[7]=hour/10; while(P0_2==0); } } } } void t0(void) interrupt 1 using 0 { mstcnt++; if(mstcnt==8) { mstcnt=0; P1=dispcode[dispbuf[dispbitcnt]]; P3=dispbitcode[dispbitcnt]; dispbitcnt++; if(dispbitcnt==8) { dispbitcnt=0; } } tcnt++; if(tcnt==4000) {
tcnt=0; second++; if(second==60) { second=0; minite++; if(minite==60) { minite=0; hour++; if(hour==24) { hour=0; } } } dispbuf[0]=second%10; dispbuf[1]=second/10; dispbuf[3]=minite%10; dispbuf[4]=minite/10; dispbuf[6]=hour%10; dispbuf[7]=hour/10; } } }
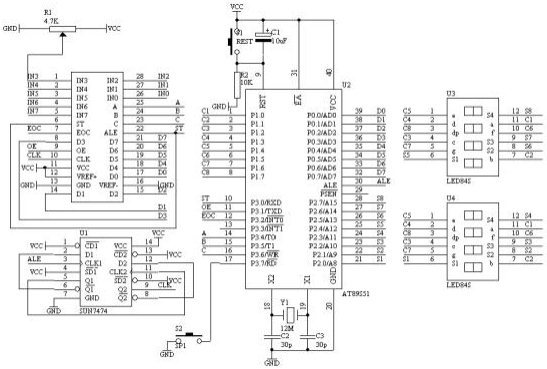
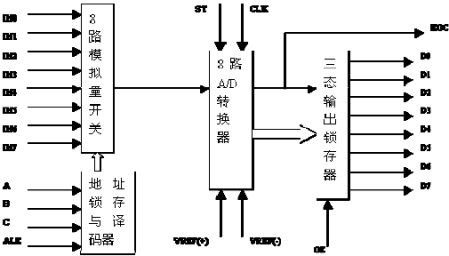
�ţ� ADC0809A/D �D(zhu��n)�Q��������(y��ng)�ü��g(sh��)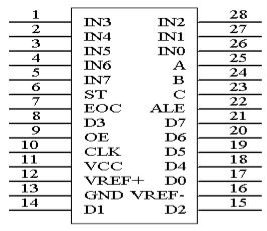 1 ����֪�RADC0809 �ǎ��� 8 λ A/D �D(zhu��n)�Q����8 ·��·�_�P(gu��n)�Լ�̎��C(j��)���ݵĿ���߉�� CMOS�M����������αƽ�ʽ A/D �D(zhu��n)�Q�������Ժ͆�Ƭ�C(j��)ֱ�ӽӿڡ� 2 ADC0809 �ă�(n��i)��߉�Y(ji��)��(g��u)�D9-1
���ψD��֪��ADC0809 ��һ��(g��) 8 ·ģ�M�_�P(gu��n)��һ��(g��)��ַ�i���c�g�a����һ��(g��) A/D�D(zhu��n)�Q����һ��(g��)���B(t��i)ݔ���i�����M�ɡ���·�_�P(gu��n)���xͨ 8 ��(g��)ģ�Mͨ�������S 8 ·ģ�M���֕r(sh��)ݔ�룬���� A/D �D(zhu��n)�Q���M(j��n)���D(zhu��n)�Q�����B(t��i)ݔ���i�������i�� A/D �D(zhu��n)�Q��Ĕ�(sh��)��������(d��ng) OE �˞���ƽ�r(sh��)���ſ��ԏ����B(t��i)ݔ���i����ȡ���D(zhu��n)�Q��Ĕ�(sh��)��(j��)�� 3 ���_�Y(ji��)��(g��u) IN0��IN7��8 �lģ�M��ݔ��ͨ�� ADC0809 ��ݔ��ģ�M��Ҫ����̖�ΘO�ԣ�늉������� 0��5V������̖̫С������M(j��n)�зŴ�ݔ���ģ�M�����D(zhu��n)�Q�^���Б�(y��ng)ԓ���ֲ�׃������ģ�M��׃��̫�죬�t����ݔ��ǰ���Ӳɘӱ����·�� ��ַݔ��Ϳ��ƾ���4 �l ALE ���ַ�i�����Sݔ�뾀�����ƽ��Ч����(d��ng) ALE ������ƽ�r(sh��)����ַ�i���c�g �a���� A��B��C ���l��ַ���ĵ�ַ��̖�M(j��n)���i�棬��(j��ng)�g�a���x�е�ͨ����ģ�M ���M(j��n)�D(zhu��n)�Q���M(j��n)���D(zhu��n)�Q��A��B �� C ���ַݔ�뾀�������xͨ IN0��IN7 �ϵ�һ·ģ �M��ݔ�롣ͨ���x������±���ʾ�� C | B | A | �x���ͨ�� | 0 | 0 | 0 | IN0 | 0 | 0 | 1 | IN1 | 0 | 1 | 0 | IN2 | 0 | 1 | 1 | IN3 | 1 | 0 | 0 | IN4 | 1 | 0 | 1 | IN5 | 1 | 1 | 0 | IN6 | 1 | 1 | 1 | IN7 |
��(sh��)����ݔ�������ƾ���11 �l ST ���D(zhu��n)�Q������̖����(d��ng) ST �����ؕr(sh��)�����Ѓ�(n��i)���Ĵ������㣻�����ؕr(sh��)���_ʼ�M(j��n) �� A/D �D(zhu��n)�Q�����D(zhu��n)�Q���g��ST ��(y��ng)���ֵ��ƽ��EOC ���D(zhu��n)�Q�Y(ji��)����̖����(d��ng) EOC ��� �ƽ�r(sh��)�������D(zhu��n)�Q�Y(ji��)������t�����������M(j��n)�� A/D �D(zhu��n)�Q��OE ��ݔ�����S��̖�� ���ڿ������lݔ���i�������Ƭ�C(j��)ݔ���D(zhu��n)�Q�õ��Ĕ�(sh��)��(j��)��OE��1��ݔ���D(zhu��n)�Q�õ� �Ĕ�(sh��)��(j��)��OE��0��ݔ����(sh��)��(j��)���ʸ����B(t��i)��D7��D0 �锵(sh��)����ݔ������ CLK ��r(sh��)�ݔ����̖������ ADC0809 �ă�(n��i)���]�Еr(sh��)��·������r(sh��)���̖����� ����ṩ��ͨ��ʹ���l�ʞ� 500KHZ��VREF��������VREF�������酢��늉�ݔ�롣 4 ADC0809 ��(y��ng)���f�� ��1���� ADC0809 ��(n��i)������ݔ���i�����������c AT89S51 ��Ƭ�C(j��)ֱ�����B�� ��2���� ��ʼ���r(sh��)��ʹ ST �� OE ��̖ȫ����ƽ�� ��3���� ��Ҫ�D(zhu��n)�Q����һͨ���ĵ�ַ�� A��B��C �˿��ϡ� ��4���� �� ST �˽o��һ��(g��)������ 100ns �������}�_��̖�� ��5���� �Ƿ��D(zhu��n)�Q�ꮅ���҂�����(j��) EOC ��̖���Дࡣ ��6���� ��(d��ng) EOC ׃?y��u)���ƽ�r(sh��)���@�r(sh��)�o OE ����ƽ���D(zhu��n)�Q�Ĕ�(sh��)��(j��)��ݔ���o��Ƭ�C(j��)�ˡ� 5 ��(sh��)�(y��n)�΄�(w��) ���D��ʾ���� ADC0809 ��ͨ�� IN3 ݔ�� 0��5V ֮�g��ģ�M����ͨ�^ ADC0809 �D(zhu��n)�Q�ɔ�(sh��)�����ڔ�(sh��)�a������ʮ�M(j��n)���γ��@ʾ������ADC0809 �� VREF �ӣ�5V늉��� 6 �·ԭ��D
5�� ϵ�y(t��ng)����Ӳ���B�� ��1���� �ѡ���Ƭ�C(j��)ϵ�y(t��ng)�塱�^(q��)���е� P1 �˿ڵ� P1.0��P1.7 �� 8 о�ž��B�ӵ����ӑB(t��i)��(sh��)�a�@ʾ���^(q��)���е� A B C D E F G H �˿��ϣ����锵(sh��)�a�ܵĹP���(q��)�ӡ� ��2���� �ѡ���Ƭ�C(j��)ϵ�y(t��ng)�塱�^(q��)���е� P2 �˿ڵ� P2.0��P2.7 �� 8 о�ž��B�ӵ����ӑB(t��i)��(sh��)�a�@ʾ���^(q��)���е� S1 S2 S3 S4 S5 S6 S7 S8 �˿��ϣ����锵(sh��)�a�ܵ�λ���x�� ��3���� �ѡ���Ƭ�C(j��)ϵ�y(t��ng)�塱�^(q��)���е� P0 �˿ڵ� P0.0��P0.7 �� 8 о�ž��B�ӵ���ģ��(sh��)�D(zhu��n)�Qģ�K���^(q��)���е� D0D1D2D3D4D5D6D7 �˿��ϣ�A/D �D(zhu��n)�Q�ꮅ�Ĕ�(sh��)��(j��)ݔ�뵽��Ƭ�C(j��)�� P0 �˿� ��4���� �ѡ�ģ��(sh��)�D(zhu��n)�Qģ�K���^(q��)���е� VREF �����Ì�(d��o)���B�ӵ����Դģ�K���^(q��)���е� VCC �����ϣ� ��5���� �ѡ�ģ��(sh��)�D(zhu��n)�Qģ�K���^(q��)���е� A2A1A0 �����Ì�(d��o)���B�ӵ�����Ƭ�C(j��)ϵ�y(t��ng)���^(q��)���е� P3.4 P3.5 P3.6 �����ϣ� ��6���� �ѡ�ģ��(sh��)�D(zhu��n)�Qģ�K���^(q��)���е� ST �����Ì�(d��o)���B�ӵ�����Ƭ�C(j��)ϵ�y(t��ng)�� �^(q��)���е� P3.0 �����ϣ� ��7���� �ѡ�ģ��(sh��)�D(zhu��n)�Qģ�K���^(q��)���е� OE �����Ì�(d��o)���B�ӵ�����Ƭ�C(j��)ϵ�y(t��ng)���^(q��)���е� P3.1 �����ϣ� ��8�����ѡ�ģ��(sh��)�D(zhu��n)�Qģ�K���^(q��)���е� EOC �����Ì�(d��o)���B�ӵ�����Ƭ�C(j��)ϵ�y(t��ng)���^(q��)���е� P3.2 �����ϣ� ��9���� �ѡ�ģ��(sh��)�D(zhu��n)�Qģ�K���^(q��)���е� CLK �����Ì�(d��o)���B�ӵ������lģ�K���^(q��)���е� /4 �����ϣ� ��10���� �ѡ����lģ�K���^(q��)���е� CK IN �����Ì�(d��o)���B�ӵ�����Ƭ�C(j��)ϵ�y(t��ng)���^(q��)���е� ALE �����ϣ� ��11���� �ѡ�ģ��(sh��)�D(zhu��n)�Qģ�K���^(q��)���е� IN3 �����Ì�(d��o)���B�ӵ�����·���{(di��o)��ģ�K���^(q��)���е� VR1 �����ϣ� 6�� �����O(sh��)Ӌ(j��)��(n��i)�� ��1���� �M(j��n)�� A/D �D(zhu��n)�Q�r(sh��)�����ò�ԃ EOC �Ę�(bi��o)־��̖��z�y A/D �D(zhu��n)�Q�Ƿ��ꮅ�����ꮅ�t�є�(sh��)��(j��)ͨ�^ P0 �˿��x�룬��(j��ng)�^��(sh��)��(j��)̎��֮���ڔ�(sh��)�a�����@ʾ�� ��2���� �M(j��n)�� A/D �D(zhu��n)�Q֮ǰ��Ҫ�����D(zhu��n)�Q�ķ�����ABC��110 �x�����ͨ��ST��0��ST��1��ST��0 �a(ch��n)�������D(zhu��n)�Q�����}�_��̖
7�� �R��Դ���� - CH EQU 30H
- DPCNT EQU 31H
- DPBUF EQU 33H
- GDATA EQU 32H
- ST BIT P3.0
- OE BIT P3.1
- EOC BIT P3.2
- ORG 00H
- LJMP START
- ORG 0BH
- LJMP T0X
- ORG 30H
- START: MOV CH,#0BCH
- MOV DPCNT,#00H
- MOV R1,#DPCNT
- MOV R7,#5
- MOV A,#10
- MOV R0,#DPBUF
- LOP: MOV @R0,A
- INC R0
- DJNZ R7,LOP
- MOV @R0,#00H
- INC R0
- MOV @R0,#00H
- INC R0
- MOV @R0,#00H
- MOV TMOD,#01H
- MOV TH0,#(65536-4000)/256
- MOV TL0,#(65536-4000)
- MOD 256
- SETB TR0
- SETB ET0
- SETB EA
- WT: CLR ST
- SETB ST
- CLR ST
- WAIT: JNB EOC,WAIT
- SETB OE
- MOV GDATA,P0
- CLR OE
- MOV A,GDATA
- MOV B,#100
- DIV AB
- MOV 33H,A
- MOV A,B
- MOV B,#10
- DIV AB
- MOV 34H,A
- MOV 35H,B
- SJMP WT
- T0X: NOP
- MOV TH0,#(65536-4000)/256
- MOV TL0,#(65536-4000) MOD 256
- MOV DPTR,#DPCD
- MOV A,DPCNT
- ADD A,#DPBUF
- MOV R0,A
- MOV A,@R0
- MOVC A,@A+DPTR
- MOV P1,A
- MOV DPTR,#DPBT
- MOV A,DPCNT
- MOVC A,@A+DPTR
- MOV P2,A
- INC DPCNT
- MOV A,DPCNT
- CJNE A,#8,NEXT
- MOV DPCNT,#00H
- NEXT: RETI
- DPCD: DB 3FH,06H,5BH,4FH,66H
- DB 6DH,7DH,07H,7FH,6FH,00H
- DPBT: DB 0FEH,0FDH,0FBH,0F7H
- DB 0EFH,0DFH,0BFH,07FH
- END
8�� C �Z��Դ���� - #INClude <AT89X52.H>
- unsigned char code dispbitcode[]={0xfe,0xfd,0xfb,0xf7,
- 0xef,0xdf,0xbf,0x7f};
- unsigned char code dispcode[]={0x3f,0x06,0x5b,0x4f,0x66,
- 0x6d,0x7d,0x07,0x7f,0x6f,0x00};
- unsigned char dispbuf[8]={10,10,10,10,10,0,0,0};
- unsigned char dispcount;
- sbit ST=P3^0;
- sbit OE=P3^1;
- sbit EOC=P3^2;
- unsigned char channel=0xbc;//IN3
- unsigned char getdata;
- void main(void)
- {
- TMOD=0x01;
- TH0=(65536-4000)/256;
- TL0=(65536-4000)%256;
- TR0=1;
- ET0=1;
- EA=1;
- P3=channel;
- while(1)
- {
- ST=0;
- ST=1;
- ST=0;
- while(EOC==0);
- OE=1;
- getdata=P0;
- OE=0;
- dispbuf[2]=getdata/100;
- getdata=getdata%10;
- dispbuf[1]=getdata/10;
- dispbuf[0]=getdata%10;
- }
- }
- void t0(void) interrupt 1 using 0
- {
- TH0=(65536-4000)/256;
- TL0=(65536-4000)%256;
- P1=dispcode[dispbuf[dispcount]];
- P2=dispbitcode[dispcount];
- dispcount++;
- if(dispcount==8)
- {
- dispcount=0;
- }
- }
3
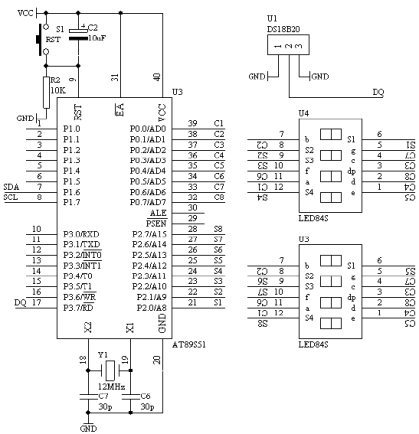
ʮ��DS18B20 ��(sh��)�֜ض�Ӌ(j��)ʹ��1��DS18B20 ����֪�R DS18B20 ��(sh��)�֜ض�Ӌ(j��)�� DALLAS ��˾���a(ch��n)�� 1��Wire�����ο������������о�·���Σ��w�eС�����c(di��n)������������M��һ��(g��)�y��ϵ�y(t��ng)�����о�·���Σ���һ��ͨ�ž������Ԓ�ܶ��@�ӵĔ�(sh��)�֜ض�Ӌ(j��)��ʮ�ַ��㡣 1��DS18B20 �a(ch��n)Ʒ�����c(di��n) ��1����ֻҪ��һ��(g��)�˿ڼ��Ɍ�(sh��)�F(xi��n)ͨ�š� ��2������ DS18B20 �е�ÿ��(g��)�����϶��Ъ�(d��)һ�o��������̖�� ��3������(sh��)�H��(y��ng)���в���Ҫ�ⲿ�κ�Ԫ�������Ɍ�(sh��)�F(xi��n)�y�ء� ��4�����y���ضȷ����ڣ�55��C ����125��C ֮�g�� ��5������(sh��)�֜ض�Ӌ(j��)�ķֱ����Ñ����ԏ� 9 λ�� 12 λ�x�� ��6������(n��i)���Мض��ϡ����澯�O(sh��)�á� 2��DS18B20 �����_��B TO��92 ���b�� DS18B20 �����_����Ҋ�D 1�������_��������Ҋ�� 1������ҕ�D���D 1
���� DS18B20 ���õ��� 1��Wire �����f(xi��)�h��ʽ������һ����(sh��)��(j��)����(sh��)�F(xi��n)��(sh��)��(j��)���p���ݔ������ AT89S51 ��Ƭ�C(j��)���f��Ӳ���ϲ���֧�ֆο����f(xi��)�h����ˣ��҂���횲���ܛ���ķ�����ģ�M�ο����ąf(xi��)�h�r(sh��)�����Ɍ� DS18B20 оƬ���L����
���� DS18B20 ����һ�� I/O �����x����(sh��)��(j��)����ˣ����x���Ĕ�(sh��)��(j��)λ������(y��n)��ĕr(sh��)��Ҫ��DS18B20 �Ї�(y��n)���ͨ�Ņf(xi��)�h�����C��λ��(sh��)��(j��)��ݔ?sh��)����_�Ժ������ԡ�ԓ�f(xi��)�h���x�ˎN��̖�ĕr(sh��)��ʼ���r(sh��)���x�r(sh��)���r(sh��)�����Еr(sh��)���nj����C(j��)�������O(sh��)�䣬�ο�������������O(sh��)�䡣��ÿһ������͔�(sh��)��(j��)�Ă�ݔ���Ǐ����C(j��)���ӆ��ӌ��r(sh��)���_ʼ�����Ҫ��ο����������͔�(sh��)��(j��)�����M(j��n)�Ќ���������C(j��)�膢���x�r(sh��)����ɔ�(sh��)��(j��)���ա���(sh��)��(j��)������Ă�ݔ���ǵ�λ���ȡ� 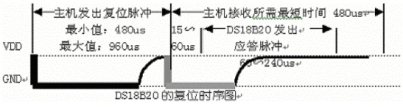 DS18B20 �ď�(f��)λ�r(sh��)��
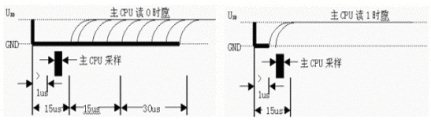 DS18B20 ���x�r(sh��)��?q��)���DS18B20 ���x�r(sh��)��֞��x 0�r(sh��)����x 1 �r(sh��)��ɂ�(g��)�^�̡����� DS18B20���x�r(sh��)϶�Ǐ����C(j��)�цο�������֮���� 15 ��֮��(n��i)�͵�ጷņο������� DS18B20 �є�(sh��)��(j��)��ݔ?sh��)��ο����ϡ�DS18B20 �����һ��(g��)�x�r(sh��)���^�̣�������Ҫ 60us ������ɡ�
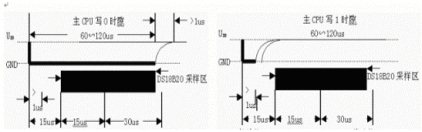
���� DS18B20 �Č��r(sh��)����Ȼ�֞錑 0 �r(sh��)��͌� 1 �r(sh��)��ɂ�(g��)�^�̡�����DS18B20 �� 0 �r(sh��)��͌� 1 �r(sh��)���Ҫ��ͬ����(d��ng)Ҫ�� 0 �r(sh��)��r(sh��)���ο���Ҫ���������� 60us�����C DS18B20 �܉��� 15us �� 45us ֮�g�܉����_�زɘ� IO �����ϵġ�0���ƽ����(d��ng)Ҫ�� 1 �r(sh��)��r(sh��)���ο���������֮���� 15us ֮��(n��i)�͵�ጷņο�����
4�� ��(sh��)�(y��n)�΄�(w��) ��һƬ DS18B20 ��(g��u)�ɜy��ϵ�y(t��ng)���y���ĜضȾ����_(d��)�� 0.1 �ȣ��y���Ĝضȵķ����ڣ�20 �ȵ���100 ��֮�g���� 8 λ��(sh��)�a���@ʾ������ 5�� �·ԭ��D
7�� C �Z��Դ���� - #INClude <AT89X52.H>
- #INClude <INTRINS.h>
- unsigned char code displaybit[]={0xfe,0xfd,0xfb,0xf7,
- 0xef,0xdf,0xbf,0x7f};
- unsigned char code displaycode[]={0x3f,0x06,0x5b,0x4f,
- 0x66,0x6d,0x7d,0x07,
- 0x7f,0x6f,0x77,0x7c,
- 0x39,0x5e,0x79,0x71,0x00,0x40};
- unsigned char code dotcode[32]={0,3,6,9,12,16,19,22,
- 25,28,31,34,38,41,44,48,
- 50,53,56,59,63,66,69,72,
- 75,78,81,84,88,91,94,97};
- unsigned char displaycount;
- unsigned char displaybuf[8]={16,16,16,16,16,16,16,16};
- unsigned char timecount;
- unsigned char readdata[8];
- sbit DQ=P3^7;
- bit sflag;
- bit resetpulse(void)
- {
- unsigned char i;
- DQ=0;
- for(i=255;i>0;i--);
- DQ=1;
- for(i=60;i>0;i--);
- RETurn(DQ);
- for(i=200;i>0;i--);
- }
- void writecommandtods18b20(unsigned char command)
- {
- unsigned char i;
- unsigned char j;
- for(i=0;i<8;i++)
- {
- if((command & 0x01)==0)
- {
- DQ=0;
- for(j=35;j>0;j--);
- DQ=1;
- }
- else
- {
- DQ=0;
- for(j=2;j>0;j--);
- DQ=1;
- for(j=33;j>0;j--);
- }
- command=_cror_(command,1);
- }
- }
- Unsigned char readdatafromds18b20(void)
- Unsigned char i;
- Unsigned char j;
- Unsigned char temp;
- temp=0;
- for(i=0;i<8;i++)
- {
- temp=_cror_(temp,1);
- DQ=0;
- _nop_();
- _nop_();
- DQ=1;
- for(j=10;j>0;j--);
- if(DQ==1)
- {
- temp=temp | 0x80;
- }
- else
- {
- temp=temp | 0x00;
- }
- for(j=200;j>0;j--);
- }
- RETurn(temp);
- }
- void main(void)
- {
- TMOD=0x01;
- TH0=(65536-4000)/256;
- TL0=(65536-4000)%256;
- ET0=1;
- EA=1;
- while(resetpulse());
- writecommandtods18b20(0xcc);
- writecommandtods18b20(0x44);
- TR0=1;
- while(1)
- {
- ;
- }
- }
- void t0(void) interrupt 1 using 0
- {
- unsigned char x;
- unsigned int result;
- TH0=(65536-4000)/256;
- TL0=(65536-4000)%256;
- if(displaycount==2)
- {
- P0=displaycode[displaybuf[displaycount]] | 0x80;
- }
- else
- {
- P0=displaycode[displaybuf[displaycount]];
- }
- P2=displaybit[displaycount];
- displaycount++;
- if(displaycount==8)
- {
- displaycount=0;
- }
- timecount++;
- if(timecount==150)
- {
- timecount=0;
- while(resetpulse());
- writecommandtods18b20(0xcc);
- writecommandtods18b20(0xbe);
- readdata[0]=readdatafromds18b20();
- readdata[1]=readdatafromds18b20();
- for(x=0;x<8;x++)
- {
- displaybuf[x]=16;
- }
- sflag=0;
- if((readdata[1] & 0xf8)!=0x00)
- {
- sflag=1;
- readdata[1]=~readdata[1];
- readdata[0]=~readdata[0];
- result=readdata[0]+1;
- readdata[0]=result;
- if(result>255)
- {
- readdata[1]++;
- }
- }
- readdata[1]=readdata[1]<<4;
- readdata[1]=readdata[1] & 0x70;
- x=readdata[0];
- x=x>>4;
- x=x & 0x0f;
- readdata[1]=readdata[1] | x;
- x=2;
- result=readdata[1];
- while(result/10)
- {
- displaybuf[x]=result%10;
- result=result/10;
- x++;
- }
- displaybuf[x]=result;
- if(sflag==1)
- {
- displaybuf[x+1]=17;
- }
- x=readdata[0] & 0x0f;
- x=x<<1;
- displaybuf[0]=(dotcode[x])%10;
- displaybuf[1]=(dotcode[x])/10;
- while(resetpulse());
- writecommandtods18b20(0xcc);
- writecommandtods18b20(0x44);
- }
- }
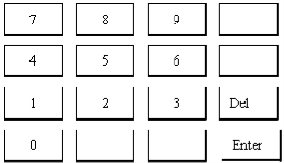
11�� 4��4 �I�P�� 8 λ��(sh��)�a���@ʾ��(g��u)�ɵ�����ܴa�i�� 4��4 �M�� 0��9 ��(sh��)���I���_�J(r��n)�I��
�� 8 λ��(sh��)�a�ܽM���@ʾ�·��ʾ��Ϣ����(d��ng)ݔ���ܴa�r(sh��)��ֻ�@ʾ��8.������(d��ng)�ܴaλ��(sh��)ݔ���ꮅ���´_�J(r��n)�I�r(sh��)����ݔ����ܴa�c�O(sh��)�����ܴa�M(j��n)�б��^�����ܴa���_���t�T�_����̎�� LED �l(f��)����O����һ���������ʾ��ͬ�r(sh��)�l(f��)�������ˡ������ܴa�����_����ֹ���Iݔ�� 3 �룬ͬ�r(sh��)�l(f��)�����֡��֡� ��(b��o)�������� 3 ��֮��(n��i)���а��I���£��t��ֹ���Iݔ�� 3 �뱻���½�ֹ�� 4�� �����O(sh��)Ӌ(j��)��(n��i)�� ��1���� 4��4 ����ʽ�I�P�R�e���g(sh��)�����P(gu��n)�@�����(n��i)��ǰ���ѽ�(j��ng)ӑՓ�^���@�ﲻ���؏�(f��)�� ��2���� 8 λ��(sh��)�a�@ʾ����ʼ���r(sh��)���@ʾ��P ��������ݔ����� 6 λ��(sh��)���ܴa����(d��ng)�ܴaݔ������´_�J(r��n)�I���M(j��n)���ܴa���^��Ȼ��o������(y��ng)����Ϣ����ݔ���ܴa�^���У��@ʾ��ֻ�@ʾ��8.������(d��ng)��(sh��)��ݔ�볬�^ 6��(g��)�r(sh��)���o����(b��o)����Ϣ�����ܴaݔ���^���У���ݔ���e(cu��)�`���������á�DEL���I�h������ݔ����e(cu��)�`�Ĕ�(sh��)�֡� ��3���� 4��4 ����ʽ�I�P�İ��I���ֲܷ��D��D 4.33.2 ��ʾ��
5�� C �Z��Դ���� - #include <AT89X52.H>
- unsigned char ps[]={1,2,3,4,5};
- unsigned char code dispbit[]={0xfe,0xfd,0xfb,0xf7,
- 0xef,0xdf,0xbf,0x7f};
- unsigned char code dispcode[]={0x3f,0x06,0x5b,0x4f,0x66,
- 0x6d,0x7d,0x07,0x7f,0x6f,
- 0x77,0x7c,0x39,0x5e,0x79,0x71,
- 0x00,0x40,0x73,0xff};
- unsigned char dispbuf[8]={18,16,16,16,16,16,16,16};
- unsigned char dispcount;
- unsigned char flashcount;
- unsigned char temp;
- unsigned char key;
- unsigned char keycount;
- unsigned char pslen=5;
- unsigned char getps[6];
- bit keyoverflag;
- bit errorflag;
- bit rightflag;
- unsigned int second3;
- unsigned int aa,bb;
- unsigned int cc;
- bit okflag;
- bit alarmflag;
- bit hibitflag;
- unsigned char oka,okb;
- void main(void)
- {
- unsigned char i,j;
- TMOD=0x01;
- TH0=(65536-500)/256;
- TL0=(65536-500)%256;
- TR0=1;
- ET0=1;
- EA=1;
- while(1)
- {
- P3=0xff;
- P3_4=0;
- temp=P3;
- temp=temp & 0x0f;
- if (temp!=0x0f)
- {
- for(i=10;i>0;i--)
- for(j=248;j>0;j--)��
- temp=P3;
- temp=temp & 0x0f;
- if (temp!=0x0f)
- {
- temp=P3;
- temp=temp & 0x0f;
- switch(temp)
- {
- case 0x0e:
- key=7;
- break;
- case 0x0d:
- key=8;
- break;
- case 0x0b:
- key=9;
- break;
- case 0x07:
- key=10;
- break;
- }
- temp=P3;
- P1_1=~P1_1;
- if((key>=0) && (key<10))
- {
- if(keycount<6)
- {
- getps[keycount]=key;
- dispbuf[keycount+2]=19;
- }
- keycount++;
- if(keycount==6)
- {
- keycount=6;
- }
- else if(keycount>6)
- {
- keycount=6;
- keyoverflag=1;//key overflow
- }
- }
- else if(key==12)//delete key
- {
- if(keycount>0)
- {
- keycount--;
- getps[keycount]=0;
- dispbuf[keycount+2]=16;
- }
- else
- {
- keyoverflag=1;
- }
- }
- else if(key==15)//enter key
- {
- if(keycount!=pslen)
- {
- errorflag=1;
- rightflag=0;
- second3=0;
- }
- else
- {
- for(i=0;i<keycount;i++)
- {
- if(getps[ i]!=ps[ i])
- {
- i=keycount;
- errorflag=1;
- rightflag=0;
- second3=0;
- goto a;
- }
- }
- errorflag=0;
- rightflag=1;
- a: i=keycount;
- }
- }
- temp=temp & 0x0f;
- while(temp!=0x0f)
- {
- temp=P3;
- temp=temp & 0x0f;
- }
- keyoverflag=0;//?????????
- }
- }
- P3=0xff;
- P3_5=0;
- temp=P3;
- temp=temp & 0x0f;
- if (temp!=0x0f)
- {
- for(i=10;i>0;i--)
- for(j=248;j>0;j--);
- temp=P3;
- temp=temp & 0x0f;
- if (temp!=0x0f)
- {
- temp=P3;
- temp=temp & 0x0f;
- switch(temp)
- {
- case 0x0e:
- key=4;
- break;
- case 0x0d:
- key=5;
- break;
- case 0x0b:
- key=6;
- break;
- case 0x07:
- key=11;
- break;
- }
- temp=P3;
- P1_1=~P1_1;
- if((key>=0) && (key<10))
- {
- if(keycount<6)
- {
- getps[keycount]=key;
- dispbuf[keycount+2]=19;
- }
- keycount++;
- if(keycount==6)
- {
- keycount=6;
- }
- else if(keycount>6)
- {
- keycount=6;
- keyoverflag=1;//key overflow
- }
- }
- else if(key==12)//delete key
- {
- if(keycount>0)
- {
- keycount--;
- getps[keycount]=0;
- dispbuf[keycount+2]=16;
- }
- else
- {
- keyoverflag=1;
- }
- }
- else if(key==15)//enter key
- {
- if(keycount!=pslen)
- {
- errorflag=1;
- rightflag=0;
- second3=0;
- }
- else
- {
- for(i=0;i<keycount;i++)
- {
- if(getps[ i]!=ps[ i])
- {
- i=keycount;
- errorflag=1;
- rightflag=0;
- second3=0;
- goto a4;
- }
- }
- errorflag=0;
- rightflag=1;
- a4: i=keycount;
- }
- }
- temp=temp & 0x0f;
- while(temp!=0x0f)
- {
- temp=P3;
- temp=temp & 0x0f;
- }
- keyoverflag=0;//?????????
- }
- }
- P3=0xff;
- P3_6=0;
- temp=P3;
- temp=temp & 0x0f;
- if (temp!=0x0f)
- {
- for(i=10;i>0;i--)
- for(j=248;j>0;j--);
- temp=P3;
- temp=temp & 0x0f;
- if (temp!=0x0f)
- {
- temp=P3;
- temp=temp & 0x0f;
- switch(temp)
- {
- case 0x0e:
- key=1;
- break;
- case 0x0d:
- key=2;
- break;
- case 0x0b:
- key=3;
- break;
- case 0x07:
- key=12;
- break;
- }
- temp=P3;
- P1_1=~P1_1;
- if((key>=0) && (key<10))
- {
- if(keycount<6)
- {
- getps[keycount]=key;
- dispbuf[keycount+2]=19;
- }
- keycount++;
- if(keycount==6)
- {
- keycount=6;
- }
- else if(keycount>6)
- {
- keycount=6;
- keyoverflag=1;//key overflow
- }
- }
- else if(key==12)//delete key
- {
- if(keycount>0)
- {
- keycount--;
- getps[keycount]=0;
- dispbuf[keycount+2]=16;
- }
- else
- {
- keyoverflag=1;
- }
- }
- else if(key==15)//enter key
- {
- if(keycount!=pslen)
- {
- errorflag=1;
- rightflag=0;
- second3=0;
- }
- else
- {
- for(i=0;i<keycount;i++)
- {
- if(getps[ i]!=ps[ i])
- {
- i=keycount��
- errorflag=1;
- rightflag=0;
- second3=0;
- goto a3;
- }
- }
- errorflag=0;
- rightflag=1;
- a3: i=keycount;
- }
- }
- temp=temp & 0x0f;
- while(temp!=0x0f)
- {
- temp=P3;
- temp=temp & 0x0f;
- }
- keyoverflag=0;//?????????
- }
- }
- P3=0xff;
- P3_7=0;
- temp=P3;
- temp=temp & 0x0f;
- if (temp!=0x0f)
- {
- for(i=10;i>0;i--)
- for(j=248;j>0;j--);
- temp=P3;
- temp=temp & 0x0f;
- if (temp!=0x0f)
- {
- temp=P3;
- temp=temp & 0x0f;
- switch(temp)
- {
- case 0x0e:
- key=0;
- break;
- case 0x0d:
- key=13;
- break;
- case 0x0b��
- key=14;
- break;
- case 0x07:
- key=15;
- break;
- }
- temp=P3;
- P1_1=~P1_1;
- if((key>=0) && (key<10))
- {
- if(keycount<6)
- {
- getps[keycount]=key;
- dispbuf[keycount+2]=19;
- }
- keycount++;
- if(keycount==6)
- {
- keycount=6;
- }
- else if(keycount>6)
- {
- keycount=6;
- keyoverflag=1;//key overflow
- }
- }
- else if(key==12)//delete key
- {
- if(keycount>0)
- {
- keycount--;
- getps[keycount]=0;
- dispbuf[keycount+2]=16;
- }
- else
- {
- keyoverflag=1;
- }
- }
- else if(key==15)//enter key
- {
- if(keycount!=pslen)
- {
- errorflag=1;
- rightflag=0;
- second3=0;
- }
- else
- {
- for(i=0;i<keycount;i++)
- {
- if(getps[ i]!=ps[ i])
- {
- i=keycount;
- errorflag=1;
- rightflag=0;
- second3=0;
- goto a2;
- }
- }
- errorflag=0;
- rightflag=1;
- a2: i=keycount;
- }
- }
- temp=temp & 0x0f;
- while(temp!=0x0f)
- {
- temp=P3;
- temp=temp & 0x0f;
- }
- keyoverflag=0;//?????????
- }
- }
- }
- }
- void t0(void) interrupt 1 using 0
- {
- TH0=(65536-500)/256;
- TL0=(65536-500)%256;
- flashcount++;
- if(flashcount==8)
- {
- flashcount=0;
- P0=dispcode[dispbuf[dispcount]];
- P2=dispbit[dispcount];
- dispcount++;
- if(dispcount==8)
- {
- dispcount=0;
- }
- }
- if((errorflag==1) && (rightflag==0))
- {
- bb++;
- if(bb==800)
- {
- bb=0;
- alarmflag=~alarmflag;
- }
- if(alarmflag==1)//sound alarm signal
- {
- P1_7=~P1_7;
- }
- aa++;
- if(aa==800)//light alarm signal
- {
- aa=0;
- P1_0=~P1_0;
- }
- second3++;
- if(second3==6400)
- {
- second3=0;
- errorflag=0;
- rightflag=0;
- alarmflag=0;
- bb=0;
- aa=0;
- }
- }
- else if((errorflag==0) && (rightflag==1))
- {
- P1_0=0;
- cc++;
- if(cc<1000)
- {
- okflag=1;
- }
- else if(cc<2000)
- {
- okflag=0;
- }
- else
- {
- errorflag=0;
- rightflag=0;
- P1_7=1;
- cc=0;
- oka=0;
- okb=0;
- okflag=0;
- P1_0=1;
- }
- if(okflag==1)
- {
- oka++;
- if(oka==2)
- {
- oka=0;
- P1_7=~P1_7;
- }
- }
- else
- {
- okb++;
- if(okb==3)
- {
- okb=0;
- P1_7=~P1_7;
- }
- }
- }
- if(keyoverflag==1)
- {
- P1_7=~P1_7;
- }
- }
12�� 6 λ��(sh��)�@�l��Ӌ(j��)��(sh��)��1�� ��(sh��)�(y��n)�΄�(w��) ���� AT89S51 ��Ƭ�C(j��)�� T0��T1 �Ķ��r(sh��)Ӌ(j��)��(sh��)�����ܣ�����Ɍ�ݔ�����̖�M(j��n)���l��Ӌ(j��)��(sh��)��Ӌ(j��)��(sh��)���l�ʽY(ji��)��ͨ�^ 8 λ�ӑB(t��i)��(sh��)�a���@ʾ������Ҫ���܉�?q��)?��250KHZ ����̖�l���M(j��n)�М�(zh��n)�_Ӌ(j��)��(sh��)��Ӌ(j��)��(sh��)�`����^��1HZ�� 3�� �����O(sh��)Ӌ(j��)��(n��i)�� ��1���� ���r(sh��)/Ӌ(j��)��(sh��)�� T0 �� T1 �Ĺ�����ʽ�O(sh��)�ã��ɈD��֪��T0 �ǹ�����Ӌ(j��)��(sh��)��B(t��i)�£���ݔ����l����̖�M(j��n)��Ӌ(j��)��(sh��)������������Ӌ(j��)��(sh��)��B(t��i)�µ�T0�����Ӌ(j��)��(sh��)ֵ�� fOSC/24������ fOSC��12MHz����ˣ�T0 �����Ӌ(j��)��(sh��)�l�ʞ�250KHz�������l�ʵĸ��������һ��ֻ��(sh��)�}�_�Ă�(g��)��(sh��)�������l��ֵ�� ���� T1 �����ڶ��r(sh��)��B(t��i)�£�ÿ���r(sh��) 1 ���е�����ֹͣ T0 ��Ӌ(j��)��(sh��)������ T0 ��Ӌ(j��)��(sh��)��Ԫ���xȡӋ(j��)��(sh��)�Ĕ�(sh��)ֵ��Ȼ���M(j��n)�Д�(sh��)��(j��)̎�����͵���(sh��)�a���@ʾ������ ��2���� T1 �����ڶ��r(sh��)��B(t��i)�£���r(sh��)�r(sh��)�g�� 65ms���_(d��)���� 1 ��Ķ��r(sh��)���� �Բ��ö��r(sh��) 50ms�������r(sh��) 20 �Σ�������� 1 ��Ķ��r(sh��)���ܡ� 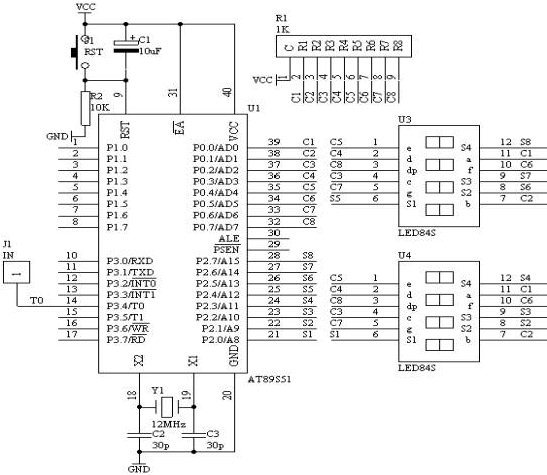
�� C �Z��Դ���� - #include <AT89X52.H>
- unsigned char code dispbit[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};
- unsigned char code dispcode[]={0x3f,0x06,0x5b,0x4f,0x66,
- 0x6d,0x7d,0x07,0x7f,0x6f,0x00,0x40};
- unsigned char dispbuf[8]={0,0,0,0,0,0,10,10};
- unsigned char temp[8];
- unsigned char dispcount;
- unsigned char T0count;
- unsigned char timecount;
- bit flag;
- unsigned long x;
- void main(void)
- {
- unsigned char i;
- TMOD=0x15;
- TH0=0;
- TL0=0;
- TH1=(65536-4000)/256;
- TL1=(65536-4000)%256;
- TR1=1;
- TR0=1;
- ET0=1;
- ET1=1;
- EA=1;
- while(1)
- {
- if(flag==1)
- {
- flag=0;
- x=T0count*65536+TH0*256+TL0;
- for(i=0;i<8;i++)
- {
- temp[ i]=0;
- }
- i=0;
- while(x/10)
- {
- temp[ i]=x%10;
- x=x/10;
- i++;
- }
- temp[ i]=x;
- for(i=0;i<6;i++)
- {
- dispbuf[ i]=temp[ i];
- }
- timecount=0;
- T0count=0;
- TH0=0;
- TL0=0;
- TR0=1;
- }
- }
- }
- void t0(void) interrupt 1 using 0
- {
- T0count++;
- }
- void t1(void) interrupt 3 using 0
- {
- TH1=(65536-4000)/256;
- TL1=(65536-4000)%256;
- timecount++;
- if(timecount==250)
- {
- TR0=0;
- timecount=0;
- flag=1;
- }
- P0=dispcode[dispbuf[dispcount]];
- P2=dispbit[dispcount];
- dispcount++;
- if(dispcount==8)
- {
- dispcount=0;
- }
- }
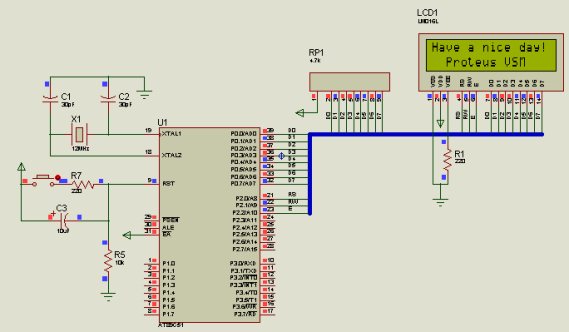
13��LCD�(q��)�ӳ���
����(j��)ԭ��D�O(sh��)Ӌ(j��)LCD1602Һ���@ʾ�·���(q��)�ӳ��� - /********************************
- FILE NAME: LCD1602.c
- CHIP TYPE: AT89C51
- CLOCK FREQUENCY: 12MHZ
- IDE: VSMStudio
- COMPILER: IAR for 8051
- TIME: 7/ 2012
- ********************************/
- #include "ioAT89C51.h"
- #include "intrinsics.h"
- // Define P3 pins
- #define DATA_BUS (P0);��(sh��)��(j��)����P0
- #define RS (P2_bit.P2_0);P2.0
- #define RW (P2_bit.P2_1) ;P2.1
- #define E (P2_bit.P2_2);P2.2
- // Define new types
- typedef unsigned char uchar;�o��̖�ַ���
- typedef unsigned int uint;�o��̖����
- // Function Prototypes
- void check_busy(void);�z��æ��̖
- void write_command(uchar com);��ָ��
- void write_data(uchar data);����(sh��)��(j��)
- void LCD_init(void);LCD��ʼ��
- void string(uchar ad ,uchar *s);
- void lcd_test(void);�yԇ����(sh��)
- void delay(uint);�ӕr(sh��)����(sh��)
- void main(void);������(sh��)
- { LCD_init();
- while(1)
- { string(0x80,"Have a nice day!");
- string(0xC0," Proteus VSM");
- delay(100);
- write_command(0x01);
- delay(100);
- }
- }
- /*******************************************
- LCD1602 Driver mapped as IO peripheral
- *******************************************/
- // Delay���ӕr(sh��)
- void delay(uint j)
- { uchar i = 60;
- for(; j>0; j--)
- { while(--i);
- i = 59;
- while(--i);
- i = 60;
- }
- }
- // Test the Busy bit���yԇæλBF
- void check_busy(void)
- { do
- { DATA_BUS = 0xff;
- E = 0;
- RS = 0;
- RW = 1;
- E = 1;���ƽ
- __no_operation();
- } while(DATA_BUS & 0x80);
- E = 0;
- }
- // Write a command,��ָ��
- void write_command(uchar com)
- { check_busy();
- E = 0;
- RS = 0;
- RW = 0;
- DATA_BUS = com;
- E = 1;
- __no_operation();
- E = 0;�½���
- delay(1);
- }
- // Write Data,����(sh��)��(j��)
- void write_data(uchar data)
- { check_busy();
- E = 0;
- RS = 1;
- RW = 0;
- DATA_BUS = data;
- E = 1;
- __no_operation();
- E = 0;
- delay(1);
- }
- // Initialize LCD controller
- void LCD_init(void)
- { write_command(0x38); // 8-bits, 2 lines, 7x5 dots
- write_command(0x0C); // no cursor, no blink, //enable display
- write_command(0x06); // auto-INCrement on
- write_command(0x01); // clear screen
- delay(1);
- }
- // Display a string
- void string(uchar ad, uchar *s)
- { write_command(ad);
- while(*s>0)
- { write_data(*s++);
- delay(100);
- }
- }
- ; LCD Display Driver Demo.
- ; Timing code assumes 1.2MHz Clock
- ;LCD Registers addresses
- LCD_CMD_WR EQU 00H
- LCD_DATA_WR EQU 01H
- LCD_BUSY_RD EQU 02H
- LCD_DATA_RD EQU 03H
- ;LCD Commands
- LCD_CLS EQU 01
- LCD_HOME EQU 02
- LCD_SETMODE EQU 04
- LCD_SETVISIBLE EQU 08
- LCD_SHIFT EQU 16
- LCD_SETFUNCTION EQU 32
- LCD_SETCGADDR EQU 64
- LCD_SETDDADDR EQU 128
- ;Reset vector
- ORG 0000h
- JMP start;//Start of the program
- ORG 0100h
- string1a:DB ' !! A M A Z I N G !! '
- DB 0
- string1b:DB '!! A M A Z I N G !! '
- DB 0
- string2:DB ' A virtual LM032L... '
- DB 0
- string3:DB ' driven by a virtual '
- DB 0
- string4:DB ' 8051 processor!'
- DB 0
- start: MOV A,#038h; 8λ2�У�5*7�c(di��n)�
- CALL wrcmd
- loop: MOV A,#LCD_SETVISIBLE+6 ;Make the display & blink visible:�_�@ʾ�����(bi��o)���W�q
- CALL wrcmd
- MOV R7,#2
- loop2: MOV DPTR,#string1a
- CALL wrstr
- MOV DPTR,#200
- CALL wtms
- MOV A,#LCD_CLS ;Clear screen
- CALL wrcmd
- MOV DPTR,#string1b
- CALL wrstr
- MOV DPTR,#200
- CALL wtms
- MOV A, #LCD_CLS ;Clear screen
- CALL wrcmd
- DJNZ R7,loop2
- MOV DPTR,#string1a
- CALL wrstr
- MOV DPTR,#400
- CALL wtms
- MOV A,#LCD_SETDDADDR+64
- CALL wrcmd
- MOV DPTR,#string2
- CALL wrslow
- MOV DPTR,#200
- CALL wtms
- MOV A,#LCD_CLS ;Clear screen
- CALL wrcmd
- MOV DPTR,#string3
- CALL wrslow
- MOV A,#LCD_SETDDADDR+64
- CALL wrcmd
- MOV DPTR,#string4
- CALL wrslow
- MOV A,#LCD_SETVISIBLE+7 ;Show the //blink cursor as well.
- CALL wrcmd
- MOV DPTR,#2000
- CALL wtms
- MOV A,#LCD_CLS ;Clear screen
- CALL wrcmd
- JMP loop
- ;Sub routine to write null terminated string at DPTR in program ram.
- wrstr: MOV R0,#LCD_DATA_WR
- wrstr1: CLR A
- MOVC A,@A+DPTR
- JZ wrstr2
- MOVX @R0,A
- CALL wtbusy
- INC DPTR
- PUSH DPL
- PUSH DPH
- POP DPH
- POP DPL
- JMP wrstr1
- wrstr2: RET
- ;Sub routine to write null terminated string at DPTR in program ram. Slowly
- wrslow: MOV R0,#LCD_DATA_WR
- wrslw1: CLR A
- MOVc A,@A+DPTR
- JZ wrslw2
- MOVX @R0,A
- CALL wtbusy
- INC DPTR
- PUSH DPL
- PUSH DPH
- MOV DPTR,#100
- CALL wtms
- POP DPH
- POP DPL
- JMP wrslw1
- wrslw2: RET
- ;Sub routine to write command:
- wrcmd: MOV R0,#LCD_CMD_WR
- MOVX @R0,A
- JMP wtbusy
- ;Sub routine to write character:
- wrchar: MOV R0,#LCD_DATA_WR
- MOVX @R0,A
- ;Subroutine to wait for busy clear
- wtbusy: MOV R1,#LCD_BUSY_RD
- MOVX A,@r1
- JB ACC.7,wtbusy
- RET
- ;Wait for number of seconds in A
- wtsec: PUSH ACC
- CALL wtms
- POP ACC
- DEC A
- JNZ wtsec
- RET
- ;Wait for number of milliseconds in DPTR
- wtms: XRL DPL,#0FFh ;Can't do DEC DPTR, so do the loop by forming 2's complement
- XRL DPH,#0FFh;and INCrementing instead.
- INC DPTR
- wtms1:MOV TL0,#09Ch ;100 ticks before overflow = 1ms at 1.2MHz Clock
- MOV TH0,#0FFh
- MOV TMOD,#1 ;Timer 0 mode 1
- SETB TCON.4 ;Timer 0 runs
- wtms2: JNB TCON.5,wtms2
- CLR TCON.4 ;Timer 0 stops
- CLR TCON.5
- INC DPTR
- MOV A,DPL
- ORL A,DPH
- JNZ wtms1
- RET
- END
������Word��ʽ�ęn51�����d��ַ��
 51��Ƭ�C(j��)�R���Z�Լ�C�Z�Խ�(j��ng)�䌍(sh��)��.doc
(2.68 MB, ���d��(sh��): 53)
51��Ƭ�C(j��)�R���Z�Լ�C�Z�Խ�(j��ng)�䌍(sh��)��.doc
(2.68 MB, ���d��(sh��): 53)
2018-11-5 20:23 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5
|
�u��
-
�鿴ȫ���u��
|





 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664





 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��