Draft lite V1.0
EZ-LINKƽ�_�_�l(f��)�փ�
1 ƽ�_����
1.1 PCB�O(sh��)Ӌ(j��)
1.2 SDK�ܘ�(g��u)
1.3 Դ�aĿ�
2 �_�l(f��)�h(hu��n)��
2.1 �����ļ�
2.2 ���ļ�
2.3 IDE����
2.4 ���̿��
2.5 ���Flash
2.6 �{(di��o)ԇ
3 IOT�ӿ�
3.1 ϵ�y(t��ng)����(w��)
3.2 Ӳ������(w��)
3.3 WIFI
3.4 Bluetooth
3.5 GSM
3.6 GPS
�s���~��
BCPU
Baseband CPU
BTCPU
Bluetooth CPU
XCPU
System CPU
BSS
Basic Service Set
BSSID
BSS ID
COS
Common Operating System
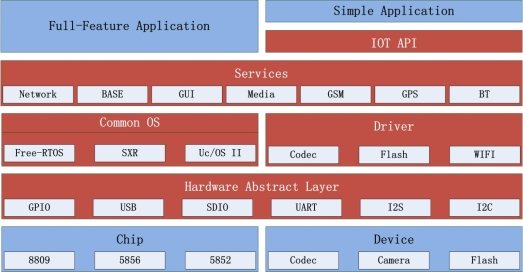
1 ƽ�_���� EZ-Link��RDA��(li��n)�W(w��ng)��(y��ng)�ü����_�l(f��)ƽ�_��ԓƽ�_����SDK�_�l(f��)����Eclipse�����_�l(f��)�h(hu��n)�����{(di��o)ԇ���ߺ͟�䛹��ߡ�SDK�_�l(f��)���ṩ����EZ-Linkƽ�_�M(j��n)����(li��n)�W(w��ng)�_�l(f��)�����ģ�K�͘�(bi��o)��(zh��n)API�ӿڣ�ͬ�r(sh��)ͨ�^��Ӳ���ӳ����ṩ��RDA��(li��n)�W(w��ng)ϵ��оƬ��ȫ��֧�֡� RDA��(li��n)�W(w��ng)ϵ��оƬ���Ъ�(d��)���{(l��n)����WIFIоƬ��Ҳ����SoC�ϼ���Wi-Fi��Bluetooth��GSM���ܵĽM��оƬ,���ṩ����UART/ADC/I2S�ڃ�(n��i)��Ӳ���ӿڡ� RDA���еĹ��漼�g(sh��)ʹ�Ñ����Ԫ�(d��)������ʹ��Wi-Fi���{(l��n)�����ܡ� �����U��EZ-Linkƽ�_SDK����Ҫ���ܺ�ʹ�÷���������������SDK�龫���棬ԓ�汾ᘌ���(li��n)�W(w��ng)�O(sh��)���_�l(f��)���ڶ̡��Ј�����(y��ng)���е����c(di��n)����EZ-Link SDK�M(j��n)����һϵ�Ѓ�(y��u)���������Ԏ����͑�����_�l(f��)Ч�ʡ��Ñ�H��Ҫ�˽��Ҫ�Ľӿڣ�Ȼ��ͨ�^SDK�ṩ���S��ʾ�����a���������������ľͿ��Ԍ�(sh��)�F(xi��n)һ����������(li��n)�W(w��ng)��(y��ng)�á� 1.1 PCB�O(sh��)Ӌ(j��)Ո������оƬ��(sh��)��(j��)�փԡ�
1.2 SDK�ܘ�(g��u)EZ-Link SDK����ģ�K�����ɔU(ku��)չ�ļܘ�(g��u)�������ČӴνY(ji��)��(g��u)���`���SDK�ܘ�(g��u)��a(ch��n)Ʒ�����ṩܛ��֧�Σ��Ñ����Ը���(j��)��ͬ�Ј������׃�����M(j��n)�п����{(di��o)����
EZ-Link SDK�ļܘ�(g��u)���£�ÿһ������(hu��)��������w������
����APP��(y��ng)�Ì���Ҫ�͑���ɣ�����ģ�K����RDA�y(t��ng)һ����l(f��)���o�͑��� �D1-1 EZ-Link SDK�ܘ�(g��u)
��Ӟ�Ӳ���ӣ�����оƬ�����O(sh��)Ӳ����
�ڶ��Ӟ�Ӳ������ӣ�ԓ���[�ص�Ӳ����(x��)��(ji��)�����ό��(q��)��(d��ng)�ṩ�y(t��ng)һ�ӿڣ��錍(sh��)�F(xi��n)��ͬоƬ�gƽ���ГQ�ṩܛ��֧�֡�
�(q��)��(d��ng)�Ͳ���ϵ�y(t��ng)�� |
�����Ӟ��(q��)��(d��ng)�Ͳ���ϵ�y(t��ng)�ӡ�RDA��RTOS֮�����ṩ��һ����COS�ӣ�ԓCOS�ӷ��b�˺��IJ���ϵ�y(t��ng)�ӿ����΄�(w��)�{(di��o)�ȣ����l(f��)̎���ȣ������(w��)���ṩ�y(t��ng)һ�ӿڡ�COS�Ӟ��Ñ��ṩ�ɷ���������Ñ������S�������x���Լ�ƫ�õIJ���ϵ�y(t��ng)���Ñ�������ֲ���еđ�(y��ng)�ó���(f��)�ô��a����ߴ��a����Ч�ʣ������_�l(f��)�M(j��n)�ȡ�
���ČӞ����(w��)�ӣ�����(w��)�ӑ�(y��ng)�ó������windows����(w��)�����linux deamon�����@Щ�����L�r(sh��)�g��(zh��)�У����ό��Ñ��͑�(y��ng)���ṩ�ض��ķ���(w��)����http��GPS����(w��)�ȡ��ό��Ñ�����ͨ�^��(bi��o)��(zh��n)�ӿ�ʹ�÷���(w��)�ӳ����ṩ�ķ���(w��)�����ý�w��(y��ng)�ó������ͨ�^GUI�ӿ��@ʾ���Ž��棬ͬ�r(sh��)����ͨ�^media����(w��)�M(j��n)�����l��(sh��)��(j��)��a�Ͳ��š�����(w��)�ӑ�(y��ng)�ó���ͨ�������ϵ�y(t��ng)���΄�(w��)(task)��ԓ�΄�(w��)ֱ���{(di��o)��COS�ӿ��Խ����cRTOS����ϡ� ����(w��)�ӑ�(y��ng)�ó���ʮ���S�������ԝM�㮔(d��ng)ǰ��������(li��n)�W(w��ng)��(y��ng)�á����õĿɔU(ku��)չ�ܘ�(g��u)ʹ�Ñ��������Ӹ������з���(w��)������������(y��ng)�ó��M��͑�����Įa(ch��n)Ʒ���� ԓ��ͬ�r(sh��)�ṩ������IOT API��ͨ�^����IOT API���Ñ����Կ����_�l(f��)һ��ε���(li��n)�W(w��ng)��(y��ng)�ã�������ˮ���ȡ�
��(y��ng)��?q��)?/strong> |
��ߌӞ鑪(y��ng)�ó���?q��)ӣ��Ñ�ͨ�������ڱ��ӡ��?y��ng)�ó���?q��)�ͨ�^�{(di��o)�÷���(w��)�ӽӿ��M(j��n)��ܛ���_�l(f��)��
EZ-Link����֮�g����ɢ�ķ�ʽ��ϣ������ṩ�Ľӿں͌�(sh��)�F(xi��n)���x���Ӄ�(n��i)�P(gu��n)ע��(sh��)�F(xi��n)�����g�P(gu��n)ע�ӿڡ�����֮�⣬EZ-Link SDKͬ����ѭģ�K���O(sh��)Ӌ(j��)ԭ�t�������Ña(ch��n)Ʒ�����M(j��n)�вü����m��(y��ng)�͑����l(f��)�]�Ñ�ƽ�_��Ӳ���YԴ�����Ч��:
| RDA оƬ�鱾SDK�O(sh��)Ӌ(j��)���յĺ��ģ�оƬ��͛Q��ϵ�y(t��ng)��CPUӲ���ܘ�(g��u)��IO�ӿڡ����������ԣ��M(j��n)��Ӱ푷���(w��)���ṩ�ķ���(w��)���a(ch��n)Ʒ���Ժ�Դ�a���g�ȡ�оƬģ�K��ʹ�Ñ��ڟo�����ό�ܛ������r�£�����(j��)�����x���m��(d��ng)?sh��)�о�?/div> | | Ŀǰ������Ƕ��ʽ��(sh��)�r(sh��)����ϵ�y(t��ng)�N��࣬�Ñ����Ը���(j��)�Լ���ƫ�ú�ʹ����(x��)�T�x�����ϵ�y(t��ng)����Ӱ�������(y��ng)�� | | �Ñ�ͨ���и��Q���O(sh��)�������(q��)��(d��ng)ģ�K�����ǝM��ԓ�(xi��ng)���� | | ����(w��)��ģ�K������Ч�p�ٸ���(g��)��ģ�K֮�g��ϣ������Ñ�h�p�c�ض��a(ch��n)Ʒ�o�P(gu��n)����(w��)�������·���(w��) |
��SDK֧�ֶ�NRDAоƬ���S����IO�ӿڷ����B�Ӹ��N���O(sh��) Ӳ������Ӟ��ό��(q��)��(d��ng)�ṩ�y(t��ng)һ�ӿڣ������(q��)��(d��ng)������ֲ �(q��)��(d��ng)ģ�K������GPIO,��UART��flash��LCD�� ��(qi��ng)��Č�(sh��)�r(sh��)����ϵ�y(t��ng)�� - ֧�ֶ��΄�(w��)̎��
- ���r(sh��)������
- ֧�ֲ��l(f��)�L�������i���΄�(w��)�gͬ����̖��
- �΄�(w��)�gͨ�řC(j��)��
- ��(d��ng)�B(t��i)��(n��i)�������glibc���ݵă�(n��i)������ӿ�
�ṩ��RTOS���b����ᘌ���ͬRTOS�M(j��n)���m�䣬ʹ����(w��)�Ӻ͑�(y��ng)�Ìӳ���[Ó������ϵ�y(t��ng)��ه EZ-Link��ϵ�y(t��ng)���ܳ����ģ�K���ķ���(w��)�����ṩ��(bi��o)��(zh��n)�ķ���(w��)�ӿڣ��O�������^�̡�ᘌ���(li��n)�W(w��ng)���c(di��n)��EZ-Link�ṩ�S���ľW(w��ng)�j(lu��)�f(xi��)�h�����㲻ͬ�O(sh��)����֮�g�������O(sh��)�以(li��n)��ͨ�� - ֧��AllSeen�f(xi��)�h
- ֧��lwIP�f(xi��)�h����http�ȑ�(y��ng)�ÌӅf(xi��)�h������U(ku��)չ��(li��n)�W(w��ng)��(y��ng)��
- ��ý�w���ܣ����l��ҕ�l��
- GPS�����(w��)
- ֧��DLNA�f(xi��)�h
- GSM/GPRS����(w��)
- Ӳ���ӷ���(w��)����Ҫᘌ�GPIO��UART�ȴ��п����ӿ�
- OS����(w��)����Ҫ���b���r(sh��)������(n��i)��������{(di��o)ԇ�Ƚӿ�
����IOT�ӿڣ��������̣���������IOT��(y��ng)�ã���(sh��)�F(xi��n)����IOT�a(ch��n)Ʒ �������Α�(y��ng)�ó���?q��)ӣ��?sh��)�F(xi��n)����(f��)�s����(li��n)�W(w��ng)��(y��ng)��
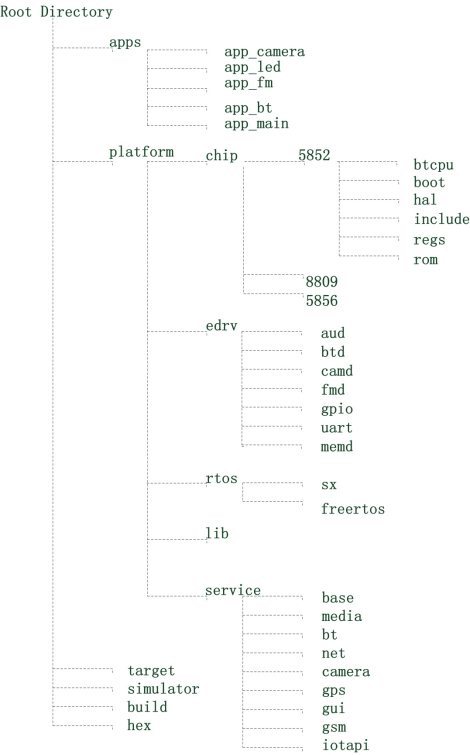
1.3 Դ�aĿ�SDKԴ�aĿ䛽Y(ji��)��(g��u)���£�����(g��)Ŀ䛌���(hu��)������Ԕ��(x��)������
�D1-2 EZ-Link SDKԴ�aĿ䛽Y(ji��)��(g��u) �D�и�Ŀ�ģ�K�f�����£�
| | | �͑���(y��ng)�ó����RDAʾ�����a | | RDA IOTƽ�_���a�����°�����chip��edrv�� rtos�� service����Ŀ䛣���Ŀ䛕�(hu��)�����������f�� | | ƽ�_оƬ���P(gu��n)���a��������boot loader��hal�ӣ��Ĵ�����ַ���x��rom���a��ͨ���Ñ��o����rom���a | | �������O(sh��)�(q��)��(d��ng)��оƬ��(n��i)�(q��)��(d��ng)�����O(sh��)�(q��)��(d��ng)������LCD��F(xi��n)M�ȣ�оƬ��(n��i)���(q��)��(d��ng)���(n��i)�������(q��)��(d��ng)����GPIO��UART�� | | ��(sh��)�r(sh��)����ϵ�y(t��ng)�ӣ�ԓĿ䛰���ԭ������ϵ�y(t��ng) | | | ���A(ch��)����(w��)������RTOS������ | | �W(w��ng)�j(lu��)����(w��)���ṩhttp��lwna��tcp/ip�����ӿ� | | | | | | | | | | | | | | | | | | Ӱ��Ŀ䛣�ԓĿ��ھ��g�r(sh��)�ɾ��g�_�����ɣ��Á���ž��g�^�������ɵ��R�r(sh��)�ļ� | | | | Lod�ļ���Ramrun�ļ�������GDB���P(gu��n)asm��map�ļ� |
��1-1 EZ-LINK SDKĿ䛽Y(ji��)��(g��u)����
2 �_�l(f��)�h(hu��n)��EZ-LINK�x��windows����ϵ�y(t��ng)�����C(j��)��HOST������windowsϵ�y(t��ng)�д���澎�g�h(hu��n)���� 2.1 �����ļ�ģ�K�����O(sh��)Ӌ(j��)���Ñ����Ʈa(ch��n)Ʒ�ṩ�˱�����ͨ�����Ʈa(ch��n)Ʒͨ�^�������ļ�����ɡ������ļ���targetĿ䛣�EZ-LINK�����ļ���Ҫ�漰���ׂ�(g��)��
| | | �a(ch��n)Ʒ���ã�target��ʾ�a(ch��n)Ʒ���_�l(f��)�� | | ��target.def��Ϣ�ļ���̎����ͨ������Ҫ�Ñ��� | | | | �Ñ����ܺ��^�ļ��������Ñ�APP���� �ļ�����./target/include | | Ӳ����·������ �ļ�����./target/include | | У��(zh��n)���� �ļ�����./target/include |
��2-1 �����ļ�
�a(ch��n)Ʒ���x�����ļ�target.def��������һЩ�x�(xi��ng)�����x�(xi��ng)���_�ĺ���(sh��)Ո���������ļ��f��עጣ� | | | | | | | | | ���xFLASH��͡��r(sh��)犼�ADMUX | | | | | �{(l��n)���(q��)��(d��ng) | ���x�{(l��n)��ģ�K��ͣ�32K�r(sh��)犹��_��UART�� | | | | | | ���xWIFI 32K�r(sh��)犹��_��TCP/IP֧�֣�SDIO��GPIO��SDMMC�ӿ�֧�֣�DLNA�ӿ�֧�֣�WIFI����֧�� | | | | | | | | | | | | | | | | | | ���g��(y��u)���x�(xi��ng) | CT_OPT����(y��u)�����g���g WITHOUT_WERROR���澯�Ƿ�ֹͣ���g | | |
��2-2 �a(ch��n)Ʒ�����ļ��x�(xi��ng) 2.2 ���ļ�EZ-Link�_�l(f��)ƽ�_���ļ��y(t��ng)һ������./platform/lib/chip_nameĿ䛡��Ñ��_�l(f��)����r(sh��)���õ��^�ļ������ڸ�ģ�K./inlcudeĿ䛡�
���ļ��֞�release��debug�ɂ�(g��)�汾��ͨ�^�ļ����^(q��)�֡�debug�汾�����{(di��o)ԇ��Ϣ��������ʹ��GDB�����M(j��n)�Іβ��{(di��o)ԇ���{(di��o)ԇ��Ϣ����ͨ�^���ڴ�ӡ�������_��release�汾�������{(di��o)ԇ��Ϣ����ʽ�l(f��)���Įa(ch��n)Ʒbin�ļ���(y��ng)��(d��ng)朽�release�汾���Ԝp��bin�ļ��w�e������\(y��n)���ٶȡ�
2.3 IDE����EZ-LINK SDK�x��Eclipse���鼯���_�l(f��)�h(hu��n)����SDK���g����朽y(t��ng)һ������Eclipse�С�
| Eclipse��JRE��Jave Run Environment���x��32λ�汾�����Լ���64��32λ����ϵ�y(t��ng) |
- ���dEZ-LINK�����_�l(f��)���߰�����������JRE���b�����Eclipeܛ��
- ���bJRE�����b�^��ʼ�K�x��Ĭ�J(r��n)���b�x�(xi��ng)
- Eclipse�o�谲�b��ֱ�ӽ≺�\(y��n)��
Eclipse�ɹ��\(y��n)���f�������_�l(f��)�h(hu��n)��������������һ��ͨ�^Eclipse���þ��g���ߣ���(d��o)��SDK���ļ���Դ�a��
���_Eclipse, �x��ˆΡ�File/New��, Ȼ���x��RDA Project�����(xi��ng)Ŀ���ô������£��Զ��x���������x���(xi��ng)Ŀ���a·���� �D2-1 ��(chu��ng)���(xi��ng)Ŀ
�(xi��ng)Ŀ���A(ch��)���a��RDA�ṩ���Ñ������ڻ��A(ch��)���a֮�ό�(sh��)�F(xi��n)�Լ����еĹ��ܺ͑�(y��ng)�á� �ęn��ʾ���������顰iot�����x����a·����Γ���Finish�����o�����ɹ������£� 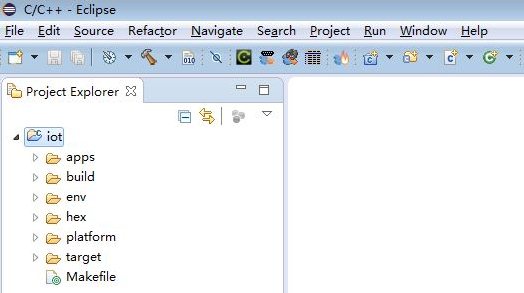 �D2-2 �(xi��ng)Ŀ�g�[��
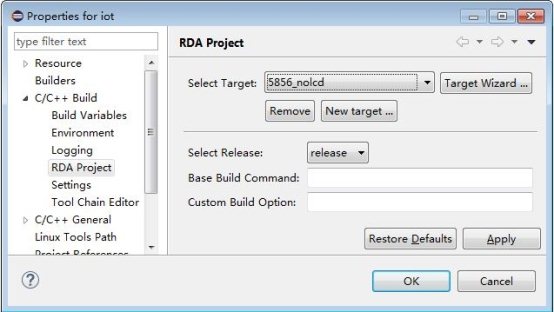
�ڡ�Project Explorer�����c(di��n)�����I���x��Properties�����M(j��n)�롰Properties�����ڣ��x��C/C++ Build����Ȼ���x��RDA Project��������Ŀ��(bi��o)�� | | | �(xi��ng)Ŀ��?q��)��������?xi��ng)Ŀ���ԡ�ģ�K�� | | | | | | �x�����ɡ�release��߀�ǡ�debug���汾 | | | | |
�D2-3 �(xi��ng)Ŀ����
�ڡ�Project Explorer�����c(di��n)�����I���x��RDA Tools����Ȼ����Կ����ɂ�(g��)���g�x�(xi��ng)��
�D2-4 ���g�(xi��ng)Ŀ
�ڡ�Project Explorer����չ�_��Ŀ� iot���x��ģ�K����ģ�K���c(di��n)�����I���x��RDA Tools����Ȼ����Կ������ɂ�(g��)�x�(xi��ng)��
�D2-5 ���gģ�K
2.4 ���̿����EZ-LINK�_�l(f��)ƽ�_���ԣ��̶̔�(sh��)ʮ�д��a�Ϳ������һ��(g��)���ε���(li��n)�W(w��ng)��(y��ng)�ã�������LED���ȡ�������(li��n)�W(w��ng)��(y��ng)�þ��̿���Ѓɲ��ֽM�ɣ�
- init()����(sh��)��ؓ(f��)؟(z��)�YԴ��ʼ��
- loop()����(sh��)�����m(x��)�O(ji��n) ϵ�y(t��ng)�¼�����̎����loop����(sh��)���g���\(y��n)��ֱ��ϵ�y(t��ng)�P(gu��n)�C(j��)
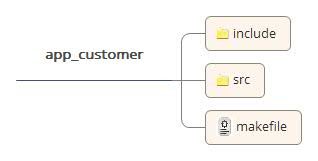
�Ñ�ģ�K�M���Y(ji��)��(g��u) |
�D2-6 �����a�Y(ji��)��(g��u)
includeĿ䛴���Ñ��^�ļ�������Ñ��o�Զ��x�^�ļ���ԓĿ䛿��Ԟ�գ�����ֱ�ӄh����
srcĿ䛴���Ñ�Դ�ļ���Դ�ļ��Ќ�(sh��)�F(xi��n)init()��loop()���Ñ���init()�Ќ�(sh��)�F(xi��n)��ʼ�����a����loop()��̎�����O(sh��)��WIFIģ�K�a(ch��n)�����¼���Դ�ļ��Y(ji��)��(g��u)����ʾ�����a��
makefile�ļ����й̶���ʽ���������á�ģ�Kmakefile�����o���ľͿ������_���g�Ñ����a�����Ñ����a�cϵ�y(t��ng)���ļ�һ���g朽����ɿɟ�䛵�flash���M(j��n)���ļ���
## ----------------------------------------------------------- ## ## Don't touch the next line unless you know what you're doing.## ## ----------------------------------------------------------- ## include ${SOFT_WORKDIR}/env/compilation/compilevars.mk
# Name of the module LOCAL_NAME := apps/ap_customer
# list all modules APIs that are neccessary to compile this module LOCAL_API_DEPENDS := \ platform \ platform/service \ ## ----------------------------------------------------------- ## ## List all your sources here ## ## ----------------------------------------------------------- ## include src/make.srcs
## ----------------------------------------------------------- ## ## Do Not touch below this line ## ## ----------------------------------------------------------- ## include ${SOFT_WORKDIR}/env/compilation/compilerules.mk |
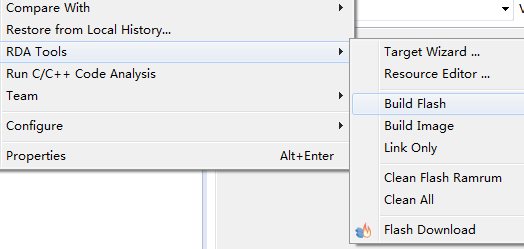
2.5 ���Flash
���BIN�ļ�ʹ��USB�D(zhu��n)���ھ���RDA�ṩ���_�l(f��)���а���USB�D(zhu��n)�����(q��)��(d��ng)�����c(di��n)�����b���(q��)��(d��ng)���b�ɹ������β鿴windows��������塱->���O(sh��)�������->���˿ڡ����ڡ��˿ڡ��x�(xi��ng)�£���������ʾUSB-to-Serial�˿ڣ��f�����b�ɹ���
�D2-7 ���b�����(q��)��(d��ng)
��Eclipse�ˆ��(xi��ng)�x��windows����Ȼ���x��Preference�����x��C/C++����Ȼ���x��RDA Tools�����ڡ�Serial Setting�����x�ں����_��Baudrate��
�D2-8 ��������
������P(gu��n)���o��Eclipse���ߙڣ����Dʾ�� �������ҷքe�ǣ� | ����Ŀ��(bi��o)�壬Ŀ��(bi��o)�匢�؆� | | �B��Ŀ��(bi��o)�壬�ɹ�ʧ������(hu��)�Џ�����Ԓ����ʾ | | | | ���_��(n��i)���x�����ڣ�ԓ������2.6 �{(di��o)���н�B | | |
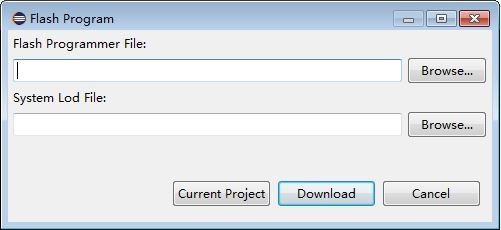
�B��UART COM�ڣ��{(l��n)���B��HST_RXD�����B��HST_TXD���ھ��ӵء� ����(d��ng)Eclipse���c(di��n)�����ߙڡ�Connect Target�����B�ӳɹ����c(di��n)����Down Flash�����x��Lod�ļ����c(di��n)����Download���� �D2-9 ���d�x�(xi��ng)
| Flash Programmer File�ļ���build flash�a(ch��n)�� System Lod File�ļ���build image�a(ch��n)��������2.3 IDE����
|
2.6 �{(di��o)ԇ���ڴ�ӡtrace����鳣Ҋ���{(di��o)ԇ�ֶΡ�EZ-LINK trace��ģ�K���ģ�K��(n��i)����Ҫ�Է֞鲻ͬ�ȼ���
ͨ�^���_�P(gu��n)�������x���g�r(sh��)�Ƿ�����ض�ģ�Ktrace��
ͨ�^Eclipse���ߣ������x���\(y��n)�Еr(sh��)�Ƿ�ݔ���ض�ģ�K��ԓģ�K�ض����e��trace���O(sh��)�ò��E���£�
��Eclipse�ˆΙ��x��windows����Ȼ���x��Preference�����x��C/C++����Ȼ���x��RDA Tools�������Γ���Trace Mask�����o����������Ԓ��
�D2-10 ����Trace
��Select Module���x��traceģ�K��16��(g��)level����traceݔ�����e��
3 IOT�ӿ�3.1 ϵ�y(t��ng)����(w��)3.1.1 ��(n��i)���^�ļ���iot_base.h 3.1.1.1 iot_Malloc | | | PVOID iot_Malloc(UINT32 size) | |
| | | | | |
|
|
3.1.1.2 iot_Free3.1.2 Trace�^�ļ�iot_base.h 3.1.2.1 iot_Printf | ��ӡtrace��ʾ����ӡLED����B(t��i)�� |
| iotPrintf("led status = %d ", ledOn); | | VOID iot_Printf(INT8* fmt,...) | |
| | | | | |
|
|
3.1.3 �ӕr(sh��)3.1.3.1 iot_DelayMs | | | VOID iot_delayMs(UIN32 ms) | |
| | | | | |
|
|
3.1.3.2 iot_DelaySeconds | | | VOID iot_DelaySeconds( UINT32 seconds) | |
| | | ���r(sh��)���r(sh��)�L��������λ | | |
|
|
3.2 Ӳ������(w��)3.2.1 UART3.2.1.1 uart_Open | | | VOID uart_Open(UINT8 id, UINT32 baudrate) | |
| | | | | | | | |
|
|
3.2.1.2 uart_Close | | | VOID uart_Close(UINT8 id); | |
| | |
| | |
|
|
3.2.1.3 uart_Write | ͨ�^UART�ӿڰl(f��)�͔�(sh��)��(j��)��ÿ��ֻ�l(f��)��һ��(g��)�ֹ�(ji��)��(sh��)��(j��) | | UINT32 uart_Write(UINT8 id, CHAR ch); | |
| | | | | | | | | | ͨ�^UART�l(f��)���ֹ�(ji��)��(sh��) |
| | | �l(f��)�͔�(sh��)��(j��)ʧ�� |
3.2.1.4 uart_Read | ͨ�^UART�ӿ��x��(sh��)��(j��) | | UINT32 uart_Read(UINT8 id, CHAR* buff) | |
| | | | | | | | | | ͨ�^UART�����ֹ�(ji��)��(sh��) |
| | | |
3.2.2 GPIO3.2.2.1 gpio_Open | | | VOID gpio_Open(UINT8 port, UINT8 direction) | |
| | | | | | | | |
|
|
3.2.2.2 gpio_Close | | | VOID gpio_Close(UINT8 port) | |
| | | | | |
|
|
3.2.2.3 gpio_Write | | | VOID gpio_Write(UINT8 port, UINT8 data) | |
| | | | | | | | |
|
|
3.2.2.4 gpio_Read | | | UINT32 gpio_Read(UINT8 port) | |
| | | | | GPIO�ӿڮ�(d��ng)ǰ��(sh��)��(j��) |
|
|
3.2.2.5 ʾ������������(li��n)�W(w��ng)��(y��ng)�ã�����LED����ͨ�^WIFI�o������LED���_�P(gu��n)���F(xi��n)��(sh��)�����У����Ԝp���b�������p�p�����w�Ɖĵȡ�
// app_led.c #include ��hal_gpio.h�� #include ��tcpip_sockets.h��
static struct sockaddr_in ledSckAddr; static INT8 ledSckServer; static INT8 ledSckClient = 0; ///Only accept 1 byte data(0 or 1), ok for turn on/off the LED #define MAX_RECV_BUFF 1 #define LED_SCK_PORT 5050 #define MAX_LED_CONNECTION 1
VOID init(VOID) { struct sockaddr_in clientAddr; HAL_GPIO_GPIO_ID_T ledGpioId; HAL_GPIO_DIRECTION_T direction;
///Use the tenth GPIO port ledGpioId = HAL_GPIO_10; direction = HAL_GPIO_DIRECTION_OUTPUT; ///Must open the GPIO before use it gpio_Open(ledGpioId, direction);
ledSckServer = socket(AF_INET, SOCK_STREAM, IPPROTO_TCP); memset(&ledSckAddr,0, sizeof(struct sockaddr_in));
ledSckAddr.sin_family=AF_INET; ledSckAddr.sin_addr.s_addr=htonl(INADDR_ANY); ledSckAddr.sin_port=htons(LED_SCK_PORT);
if(-1 == bind(ledSckServer, (struct sockaddr *)(& ledSckAddr),sizeof(sockaddr_in))) { return ; } }
VOID loop(VOID) { INT8 readLen = 0; UINT8 ledOn; /// If no connection, waiting for connect if (ledSckClient <= 0) { if(-1 == listen(ledSckServer, MAX_LED_CONNECTION)) { return ; } addrSize = sizeof(struct sockaddr_in); ledSckClient = accept(ledSckServer, (struct sockaddr *)(&clientAddr), &addrSize); if(-1 == ledSckClient) { return ; } } readLen = read(ledSckClient, &ledOn, MAX_REV_BUF_SIZE); if (readLen > 0) { if (0 == ledOn || 1 == ledOn) gpio_Write(ledGpioId, ledOn); } } |
3.3 WIFI3.3.1 ���̽ӿ��^�ļ���iot_wifi.h 3.3.1.1 iot_Connect | | | INT32 iot_Connect(const char *addr, INT16 portno) | |
| | | �W(w��ng)�j(lu��)��ַ��URL���� IP | | | | | |
| |
| |
| |
3.3.1.2 iot_Send | | | INT32 iot_Send(INT32 sockfd, const INT8* buffer, UINT32 len) | |
| | | | | | �l(f��)�͔�(sh��)��(j��)���� | | | �l(f��)�͔�(sh��)��(j��)�L�� | | |
|
|
3.3.1.3 iot_Recv | | | INT32 iot_Recv(INT32 sockfd, INT8 *buffer, UINT32 len) | |
| | | | | | | | | | | ��(sh��)�H�����ֹ�(ji��)��(sh��) |
|
|
3.3.1.4 iot_Close | �P(gu��n)�]�W(w��ng)�j(lu��) | | INT32 iot_Close(INT32 sockfd) | |
| | | | |
|
|
|
3.3.2 ʾ������#include "iot_wifi.h" // Source device id allocated by oneNet #define SRC_DEV "777" // Destination device id allocated by oneNet #define DST_DEV "778" // API key allocated by oneNet #define API_KEY "your api key" // Data stream name, created on oneNet #define DATA_STREAM "your data stream" #define MAX_RESP_BUF 32
// ============================================================================ // Loop forever // Send temperature value to cloud application whenever changed // @return void // ============================================================================ VOID loop() { // Server information for connection INT8 *server_ip = "183.230.40.39"; INT8 *port = "876"; INT8 *src_dev = SRC_DEV; INT8 *dst_dev = DST_DEV; INT8 *src_api_key = API_KEY; INT8 *data_stream = DATA_STREAM; DOUBLE temperature = 0.0; INT sock, ret; EdpPacket *pkg = NULL; INT8 buffer[MAX_RESP_BUF] = { 0 }; SaveDataType data_type = kTypeSimpleJsonWithoutTime;
recv_buf = NewBuffer(); // Connect to server sock = iot_Connect(server_ip, atoi(port)); if (sock < 0) { iot_Printf("Error connect cloud server. \n"); return; } // Build connect package follow oneNet EDP protocol pkg = PacketConnect1(src_dev, src_api_key); if (pkg == NULL) { iot_Printf("Build connect pkg failed.\n"); return; } // Send connection request pkg to cloud server ret = iot_Send(sock, (const char*)pkg->_data, pkg->_write_pos); DeleteBuffer(&pkg); while (1) { Temperature = user_poll_current_temperature(); // Build save data pkg follow oneNet EDP protocol pkg =PacketSavedataDouble(data_type,dst_dev,data_stream,temperature,0, NULL); if (pkg == NULL) { iot_Printf("Build data failed.\n"); return; } // Send temperature value pkg to clould server iot_Send(sock, (const char*)pkg->_data, pkg->_write_pos); DeleteBuffer(&pkg); iot_DelayMs(2000); } // Close socket iot_Close(sock); return; } |
3.4 Bluetooth3.4.1 ���̽ӿ��^�ļ���iot_bt.h 3.4.1.1 bt_Open3.4.1.2 bt_Close3.4.1.3 bt_SetLocalName | �O(sh��)�ñ����{(l��n)���O(sh��)���� | | VOID bt_SetLocalName(UINT8* name) | |
| | | �����{(l��n)���O(sh��)���� | | | |
|
3.4.1.4 bt_SetVisible | �O(sh��)�ñ����{(l��n)����Ҋ�� | | VOID bt_SetVisable(UINT8 visable); | |
| | | TRUE �C ��Ҋ��FALSE �C ����Ҋ | | | |
|
3.4.1.5 bt_ScanDevice | ������߅�{(l��n)���O(sh��)�� | | UINT32 bt_ScanDevice(UINT32 timeout) | |
| | | ���賬�r(sh��)�r(sh��)�g����λ�� | | �@ȡ�{(l��n)���O(sh��)�係��(sh��) |
|
|
3.4.1.6 bt_BoneDevice | | | UINT32 bt_BondDevice( t_bdaddr device_addr, UINT32 timeout ) | |
| | | �䌦���r(sh��)�r(sh��)�g����λ�� | | |
|
3.4.1.7 bt_GetBonedDevice | | | BOOL bt_GetBonedDevice(UINT32 index, rdabt_device_t_app *device); | |
| | | �{(l��n)���O(sh��)��������ȡֵ����0~9 | | | �{(l��n)���O(sh��)����Ϣ��(sh��)��(j��)ָ� | | | | |
| | | |
3.4.1.8 bt_SppConnect | �B���{(l��n)��SPP����(w��)�� | | BOOL bt_SppConnect(t_bdaddr device_addr, UINT8 timeout); | |
| | | | | | | | | | |
| | | |
3.4.1.9 bt_SppDisconnect | | | VOID bt_SppDisconnect(VOID) | |
| | |
| | |
|
|
3.4.1.10 bt_SppSend | ͨ�^SPP�l(f��)�͔�(sh��)��(j��) | | INT32 bt_SppSend(UINT8* buf, UINT32 size) | |
| | | �l(f��)�͔�(sh��)��(j��)���_�^(q��) | | | �l(f��)�͔�(sh��)��(j��)�L�� | | | | ��(sh��)�H�l(f��)���ֹ�(ji��)��(sh��) |
| | | |
3.4.1.11 bt_SppRecv | ͨ�^�{(l��n)��SPP���Ք�(sh��)��(j��) | | INT32 bt_SppRecv(UINT32 timeout�� UINT8 *buf) | |
| | | ���r(sh��)�r(sh��)�g����λ�� | | | ���Ք�(sh��)��(j��)���_�^(q��) | | | | �ɹ����Ք�(sh��)��(j��)�ֹ�(ji��)��(sh��) |
| | | |
3.4.1.12 bt_SppAccept | �{(l��n)��SPP����(w��)�˽��ܿ͑����B�� | | BOOL bt_SppAccept(UINT32 timeout) | |
| | | ���r(sh��)�r(sh��)�g����� | | | | |
| | | |
3.4.2 ʾ������������(li��n)�W(w��ng)��(y��ng)�ã����ܲ�����ͨ�^�{(l��n)���o�����Ʋ������_�P(gu��n)��
// app_smart_plug.c
#include ��bt_types.h�� #include ��hal_gpio.h��
static HAL_GPIO_GPIO_ID_T plugGpioId;
VOID init(VOID) { HAL_GPIO_DIRECTION_T direction;
// Use the fifth GPIO port plugGpioId = HAL_GPIO_15; direction = HAL_GPIO_DIRECTION_OUTPUT; // Must open the GPIO before use it gpio_Open(plugGpioId, direction ); bt_Open(VOID); }
VOID loop(VOID) { t_DataBuf btData;
memcpy(&btData, 0, sizeof(t_DataBuf)); // Return only when data available or error bt_SppRecv(&btData); if (btData.len > 0) { if (0 == (*btData.buff) || 1 == (*btData.buff) ) { gpio_Write(plugGpioId, *btData.buff); } } } |
ȫ���Y��51hei���d��ַ����Դ�a�c�փԣ���
http://www.raoushi.com/bbs/dpj-135991-1.html
| 




 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664










 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��