|
FDC2214�ք��R�e�b�� ժҪ
�S���r���İl(f��)չ�c�ƌW(xu��)���g(sh��)�ďV����(y��ng)�ã��F(xi��n)�����Ƽ�����������ҲԽ��ԽԽ��ı��˂������ܣ��߿Ƽ����˂������˺ܶ�㣬���ÿƼ��ֶν�Q�������a(ch��n)�еČ��H���}Ҳ�ͳ��ˮ�(d��ng)��Ƽ��_�l(f��)�߂��Ĺ�ͬԒ�}��
�����O(sh��)Ӌ���F(xi��n)�ք��R�e�b�ã�ͨ�^���ֽӽ����ж�������ݵ�׃�����ЛQ�քݴ������x��ԓ�Ŀ����FDC2214оƬ�Լ�KEIL5�_�l(f��)ƽ�_������18��H늸С�22PF��ݘ�(g��u)��LC�C���·���O(sh��)Ӌ�_�l(f��)һ���ք��R�e�b�ã�ԓ�ք��R�e�b�ÿɌ��F(xi��n)��ģʽ�У�Ӗ(x��n)�����ЛQ���ЛQģʽ�քe����ȭ�Α�ȭ�Α�Ĝ�(zh��n)�_�ЛQ��Ӗ(x��n)��ģʽ�¸���(j��)�z�y�T�����ε�Ӗ(x��n)��������Ч�����ЛQģʽ��ָ������(y��ng)�քݡ�ԓ�Ŀ�`����\����ݙz�y�������� LC �C���·���l�ʵĿ��ƣ������ܻ����R�eϵ�y(t��ng)�ṩ��ȫ�µ��O(sh��)Ӌ���
Ŀ�
��һ�� ϵ�y(t��ng)����3
11 ϵ�y(t��ng)���w��(g��u)��3
12 ϵ�y(t��ng)���w���F(xi��n)����3
13 ������Փ�����cӋ��4
�ڶ��� ϵ�y(t��ng)Ӳ���O(sh��)Ӌ5
21 ϵ�y(t��ng)���wӲ���Y(ji��)��(g��u)5
22 ϵ�y(t��ng)���wӲ���O(sh��)Ӌ5
23 ��ݙz�yģ�KӲ���O(sh��)Ӌ6
24 ��Ƭ�Cģ�KӲ���O(sh��)Ӌ7
������ ϵ�y(t��ng)ܛ���O(sh��)Ӌ8
31 ϵ�y(t��ng)���wܛ���O(sh��)Ӌ8
32 ��ݙz�yģ�Kܛ���O(sh��)Ӌ9
33 ��Ƭ�Cģ�Kܛ���O(sh��)Ӌ9
������ �yԇ�����c�yԇ�Y(ji��)��10
41 �yԇ����10
42 �yԇ�Y(ji��)��10
421 �}Ŀһ��ϵ�y(t��ng)�yԇ�Y(ji��)��10
422 �}Ŀ����ϵ�y(t��ng)�yԇ�Y(ji��)��11
423 �}Ŀ����ϵ�y(t��ng)�yԇ�Y(ji��)��12
424 �}Ŀ�ĵ�ϵ�y(t��ng)�yԇ�Y(ji��)��12
425 ����ݔ�Aģʽ�yԇ�Y(ji��)��13
������ ���Y(ji��)14�����īI15
��� �ք��R�e������16
��һ�£�ϵ�y(t��ng)����
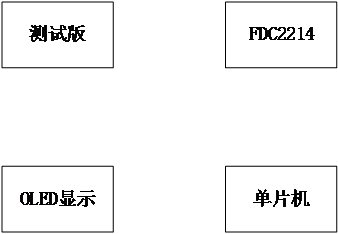
1.1 ϵ�y(t��ng)���w��(g��u)�� �����ք��R�e�b���O(sh��)Ӌ��Ҫ��IAP15W4K58S4��Сϵ�y(t��ng)�塢FDC2214ģ�K��OLED�@ʾ�����yԇ����O��M��ϵ�y(t��ng)���w��(g��u)�Ɍ���D��D1-1

�D1-1 ϵ�y(t��ng)���w��(g��u)�Ɍ���D 1.2 ϵ�y(t��ng)���w���F(xi��n)���� �ք��R�e�b�ÿɌ��F(xi��n)�ɷNģʽ���ЛQģʽ��Ӗ(x��n)��ģʽ���ЛQģʽ�·֞鄝ȭ�Α�Ͳ�ȭ�Α�O����ȭ�Α����(j��)�O��z�y����ͬ���քݣ�Ȼ������ݙz�y��������LC�C���·�a(ch��n)������(y��ng)���l��ֵ������(j��)�l��ֵӋ��������ք���(y��ng)�����ֵ�������OLED�@ʾ�����@ʾ����(y��ng)�ıȄ���1������2������3������4������5����ͬ���ڲ�ȭ�Α��£�����(j��)��ͬ����ݷ�ֵ�ж�����ʯ�^�����������������������N�Y(ji��)����Ӗ(x��n)��ģʽͬ�ӷ֞鄝ȭӖ(x��n)���Ͳ�ȭӖ(x��n)���ɷN�yԇ��������һ�Nģʽ���M�в��������ε�Ӗ(x��n)�����ГQ���ЛQģʽ������Ӗ(x��n)���ĽY(ji��)���M���ж������Ϟ鱾���O(sh��)Ӌ���w�O(sh��)Ӌ������ 1.3 ������Փ�����cӋ��
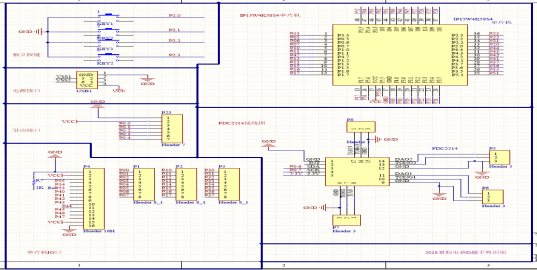
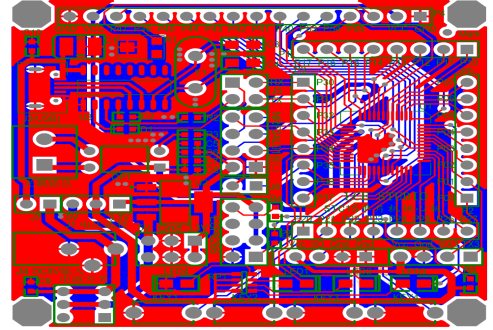
����(j��)��ݺ��l�ʵ��������е������P(gu��n)ϵ����LC�C���·�Ю�(d��ng)���C���c֮ǰ ��ݻ��S���l�ʵ����Ӷ��p�٣����C���c֮����ݻ��S���l�ʵ����Ӷ����ӣ��� Z=(ESR+jwL-j/wC) ��1-1�� ��(j��)��ʽ��1-1��Ӌ������ք�������(y��ng)���ݿ�������(y��ng)��һЩ�ɔ_�Dz��ܱ���������Ӌ�㹫ʽ C=��S/4��kd �ó���ݲ�ֻ�������ň��ĸɔ_�������ܘO�����e��ֱ�����O���g����衢늸�ͬ�r�������е����ȵ�һϵ�в��ɱ���ĸɔ_���ڴ��҂������@Щ�ɔ_���ù�ʽ��1-2�����������FDC2214�Ă�ͨ��ͬ�r�M�Мyֵ�����Ԝp���`���_��Ŀ��(bi��o)�A(y��)��Ч�����M�е�Ӌ�㌍�F(xi��n)�ЛQ��Ӗ(x��n)����ݔ�Aģʽ�� F=1/C ��1-2�� �ڶ��£�ϵ�y(t��ng)Ӳ���O(sh��)Ӌ 2.1 ���wӲ����D �O(sh��)ӋӲ����Ҫ�ɜyԇ���ڜyԇ���Ϝyԇ��ͬ�քݣ���(j��ng)FDC2214ģ�K�z�y���ͽo����оƬIAP15W4K58S4��Ƭ�C�����ͨ�ŽoOLED�@ʾ�Y(ji��)�����Դ��؏�(f��)�yԇ����D��2-1 �D2-1 ���w��D 2.2 Ӳ���O(sh��)Ӌ �ք��R�eϵ�y(t��ng)��Ҫ���� IAP15W4K58S4 ��Ƭ�C������оƬ����ԭ��D��D2-2��PCB�D��D2-3
�D2-2 ԭ��D
�D2-3 PCB�D 2.3 ��ݙz�yģ�KӲ���O(sh��)Ӌ FDC2214 �ǻ��� LC�C���·ԭ����һ����ݙz�y�������������ԭ����D2-4 ��ʾ����оƬÿ���z�yͨ����ݔ����B��һ��늸к���ݣ��M�� LC�·�� ���y��݂��ж��c LC �·���B�ӣ����a(ch��n)��һ����ʎ�l�ʣ�����(j��)ԓ�l��ֵ��Ӌ������y���ֵ��
�D2-4 FDC2214ģ�K�·�D 2.4 ��Ƭ�Cģ�KӲ���O(sh��)Ӌ ����һ��AT89S52��Ƭ�C��AT89S52 ��һ�N���ġ�������CMOS8λ������������8K ��ϵ�y(t��ng)�ɾ���Flash�惦����Ƭ��Flash���S����惦����ϵ�y(t��ng)�ɾ��̣����m�ڳ�Ҏ(gu��)�����������Ǽܘ�(g��u)̫���Σ�Ƭ�����O(sh��)�٣����m�ϱ���ʹ�á� ��������STM32��Ƭ�C��STM32ϵ�л��ڌ���Ҫ������ܡ��ͳɱ������ĵ�Ƕ��ʽ��(y��ng)�Ì��T�O(sh��)Ӌ��ARM Cortex-M3��(n��i)�ˡ�STM32��Ƭ�C������ģ�K���ģ��ӿ���������Щ����һ���IJ��㣬���紮���Д���(bi��o)־λȱ�ݡ� ��������IAP15W4K58S4��Ƭ�C���D2-5����IAP15W4K58S4ϵ�л��ڌ���Ҫ������ܡ�����A/D�D(zhu��n)�Q���ͳɱ������ġ�Ƭ��(n��i)�и��_4KB��RAM��(sh��)��(j��)�惦���g��������������8051��(n��i)�ˣ��Ȃ��y(t��ng)��8051�ٶȿ�5~12����IAP15W4K58S4��Ƭ�C������ģ�K���ģ��������˔�(sh��)��(j��)�ɼ��Ϳ�������������І�Ԫģ�K���m�ϱ����O(sh��)Ӌ���衣 ���Y(ji��)���C�ϱ��^�����N�������l(f��)�F(xi��n)IAP15W4K58S4������������҂����}Ŀ����Ҫ�����҂���IAP15W4K58S4��Ƭ�Cʹ�õĽ�(j��ng)�ʛQ�����÷������� �D2-5 IAP15W4K58S4��Ƭ�C
3.1 ܛ�����w�O(sh��)Ӌ
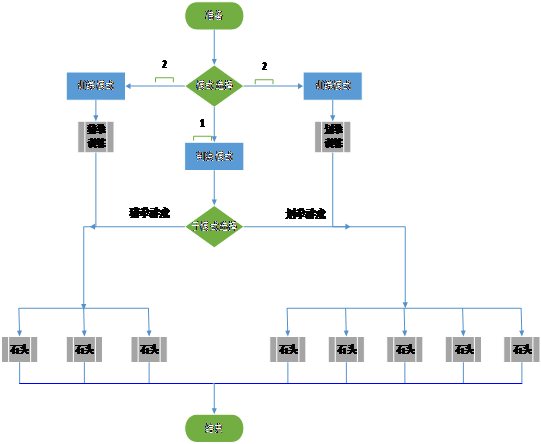
�����O(sh��)Ӌ�Ĵ�ĽǶ��^���֞�ɷNģʽ�����ЛQģʽ����Ӗ(x��n)��ģʽ�����·��ͨ���ʼ���ɹ����_ʼģʽ�x��ģʽ�M���ЛQ�������x��һģʽ���M���ЛQģʽ���S�C�M���ЛQģʽ�µ���ģʽ����ȭ�Ͳ�ȭģʽ���ڲ�ȭģʽ���ЛQ��ʯ�^�����������������������N��r�ЛQ���ڄ�ȭģʽ���M�С�1������2������3������4������5����N��r�ЛQ���������x��ģʽһ�ĭh(hu��n)��(ji��)�������x��ģʽ����ϵ�y(t��ng)�M��Ӗ(x��n)������Ӗ(x��n)��ģʽ�����M�в�ȭӖ(x��n)���̈́�ȭӖ(x��n)�������ڲ�ȭӖ(x��n)�������^����Ӗ(x��n)�����M���ЛQģʽ�µIJ�ȭ��C��ͬ���ڄ�ȭӖ(x��n)�������M�в����^���ε�Ӗ(x��n)������ص�ģʽһ�Ą�ȭ�Єe�����Ͼ��DZ����ք��R�e�b�ÿ����̣����w���̈D��D3-1 �D3-1 ���̈D 3.2 ��ݙz�yģ�Kܛ���O(sh��)Ӌ ���� FDC2214 �Ĺ���ԭ���Ɍ��F(xi��n)�քݽӽ����R�e�Ĺ��ܣ���(d��ng)���ֽӽ�ԓ��(d��o)�w����ƽ��r�����ж˵���ݰl(f��)����׃�����@�͕���(d��o)�� LC�·��ʎ�l�ʵ�׃�����Ķ���ӳ���քݽӽ����Լ��քݵ��ж�����D3-2FDC2214���ij���
�D3-2 FDC2214ģ�K���ij��� 3.3 ��Ƭ�Cģ�Kܛ���O(sh��)Ӌ IAP15W4K58S4��Ƭ�C��������̎����������惦������(sh��)��(j��)�惦�������r��I/O�ڡ�����A/D�D(zhu��n)�Q�����T����������ͨ�ſ�1��2��1�M����ͬ�����п�Ƭ��(n��i)�߾���R/C�r犺߿ɿ���(f��)λ�����Д�(sh��)��(j��)�ɼ��Ϳ���������ģ�K���ڱ����O(sh��)Ӌ���\�ôˆ�Ƭ�C�ٺò��^�� �����£��yԇ�����c�yԇ�Y(ji��)�� 4.1�yԇ���� �����O(sh��)Ӌ�����F(xi��n)�ķN���ܲ�ȭ�ЛQ����ȭ�ЛQ����ȭӖ(x��n)������ȭӖ(x��n)������Ӗ(x��n)��ģʽ�����M�в��������ε��ք�Ӗ(x��n)�����������ЛQģʽ���M�Ќ�Ӗ(x��n)���Y(ji��)���ęz�y�� ��ģʽݔ���Y(ji��)�����ЛQ���҂��\���� FDC2214 оƬ�Ă�ͨ��������(j��)ÿ�N�ք���e��С�IJ�ͬ���� OLED �@ʾ���ό��@ʾ����e�Q����ֵ���M�ж�Ό��yԇ��ȡ��ͬ��С�����ƺ���ȭ��ʽ����ȡ���ֵ����Сֵ��ƽ��ֵ��Ȼ��ÿ��ͨ��ȡ�õĔ�(sh��)ֵ�M�ЅR�����˕r���õ�һ���ą^(q��)�g�������@����������һ���քݵĔ�(sh��)ֵ���yԇ�r�\���@������ֵ���՜yԇ�T�� FDC2214 оƬ��ͨ����ݔ���ĽY(ji��)��ֵ���Д��քݣ��ɴ˿��Ԝ�(zh��n)�_�y���yԇ����չ�F(xi��n)���քݡ� 4.2 �yԇ�Y(ji��)�� 4.2.1 �}Ŀһ��ϵ�y(t��ng)�yԇ�Y(ji��)�� �b���x��ģʽһ�������ЛQģʽ�£��܌�����ˆT�M�в�ȭ�ЛQ���o����ͬ���քݡ�ʯ�^�������������͡������z�y������(y��ng)���l��ֵ��Ӌ�������(y��ng)����ݷ��������M�М�(zh��n)�_���Єe������ÿһ���ЛQ�r�g�����^ 1 �롣�yԇ�Y(ji��)�����4-1 ��4-1 �yԇ�Y(ji��)����
4.2.2 �}Ŀ����ϵ�y(t��ng)�yԇ�Y(ji��)�� ���}Ŀһ�Ĝyԇ�Y(ji��)������Ҫ���·��(f��)λ�������x���b��ģʽһ�������ЛQģʽ�£�������ˆT�M�Є�ȭ�ЛQ����ȭ������1������2������3������4���͡�5����N�քݣ�ÿһ���ЛQ�r�g�����^1�롣�yԇ�Y(ji��)�����4-2 ��4-2 �yԇ�Y(ji��)����
4.2.3 �}Ŀ����ϵ�y(t��ng)�yԇ�Y(ji��)�� ��(j��ng)�^ģʽһ�Ĝyԇ�������b���x��ģʽ�������M��Ӗ(x��n)��ģʽ����Ӗ(x��n)��ģʽ�������x���ȭӖ(x��n)����������yԇ���M�в�ȭ���ք�Ӗ(x��n)����ÿ�N����Ӗ(x��n)���Δ�(sh��)������ 3 �Σ�����Ӗ(x��n)���r�g������ 1 ��犣�Ȼ���ГQ����ģʽ��ģʽһ�ЛQģʽ�IJ�ȭ�Α���Ӗ(x��n)�����ˆT�M�в�ȭ�ЛQ��Ҫ��ÿһ���ЛQ�ĕr�g������ 1 �롣�yԇ�Y(ji��)�����4-3 ��4-3 �yԇ�Y(ji��)����
4.2.4 �}Ŀ�ĵ�ϵ�y(t��ng)�yԇ�Y(ji��)��
�b���^�m(x��)������ģʽ��Ӗ(x��n)��ģʽ�£�������yԇ���M�Є�ȭ���ք�Ӗ(x��n)����ÿ�N����Ӗ(x��n)���Δ�(sh��)ͬ�Ӳ����� 3 �Σ�����Ӗ(x��n)���r�g������ 2��犣�Ȼ���ГQ����ģʽ��ģʽһ�ЛQģʽ�Ą�ȭ�Α���Ӗ(x��n)�����ˆT�M�Є�ȭ�ЛQ��Ҫ��ÿһ���ЛQ�ĕr�g������ 1 �롣�yԇ�Y(ji��)�����4-4 ��4-4 �yԇ�Y(ji��)���� 4.2.5 ݔ�Aģʽ �ڌ��F(xi��n)ِ��ָ��Ҫ���ܺ��҂���U��һ��ݔ�Aģʽ����ϵ�y(t��ng)�S�C���ɵ�һ�N�ք��c�yԇ�ߵ��ք��M�б��^�����^�Y(ji��)����ƽ�֡��A��ݔ���N�Y(ji��)�������4-5
��4-5�yԇ�Y(ji��)����  �S�C�ք� �S�C�ք�
�yԇ���ք� | | | | | | | | | | | | | | | |
�����£��O(sh��)Ӌ���Y(ji��) �ڌW(xu��)У���҂��W(xu��)��(x��)����֪�R�ͺ��εĄ����`��Ҫ�D(zhu��n)���ɞ���������a(ch��n)��߀��Ҫһ��ƽ�_��ȫ����W(xu��)������O(sh��)Ӌ��ِ�o�҂��ṩ��һ�����B(y��ng)��(chu��ng)�¡��f(xi��)�����@�о����ƽ�_���Ǵ�W(xu��)��չ�F(xi��n)�Լ����e�۽�(j��ng)�����_�� ��Ӗ(x��n)����ِ��һ�����L���^�̣����g�đB(t��i)����Ҫ���������ܶ����}�����磺��Ӗ(x��n)���r������֪�R��Ӳ����ܛ���{(di��o)��������꠆T֮�g��ì�ܣ���牺���ȣ�����Ҫ�҂�?n��i)��˷���꠆T�ཻ�����������H�ܴ��M꠆T���ČW(xu��)��(x��)��߀�ܼ��r�l(f��)�F(xi��n)���}̎�톖�}������һ�п�������Լ��������YԴ��
���҂����ԣ�֪�R�ϵ��ի@��Ҫ�������ϵ��S�ո��ӿ�ϲ��������һ��ؔ������(j��ng)�v��һ�ݓ��С��@������O(sh��)Ӌ��ِ�،��ɞ�������;��һ���dz����õĻؑ���
�ք��R�eFDC2214�Ć�Ƭ�CԴ����
- #ifndef __stc15f2k60s2_H__
- #define __stc15f2k60s2_H__
- #endif
- #ifndef uint8
- #define uint8 unsigned char
- #endif
- #ifndef uint16
- #define uint16 unsigned int
- #endif
- #include <stc15f2k60s2.h>
- #include <string.h>
- #include <intrins.h>
- #include <math.h>
- #include <stdio.h>
- sbit SCL=P1^3;
- sbit SDA=P1^4;
- float xdata temp1,temp2,temp3,temp4,aemp1,aemp2,aemp3,aemp4;
- unsigned char xdata buf1[2]="00";
- unsigned char xdata buf2[2]="00";
- unsigned char xdata buf3[2]="00";
- unsigned char xdata buf4[2]="00";
- uint8 dis[6];
- void Delay5us(void)
- {
- _nop_();_nop_();_nop_();_nop_();
- _nop_();_nop_();_nop_();_nop_();
- _nop_();_nop_();_nop_();_nop_();
- _nop_();_nop_();_nop_();_nop_();
- _nop_();_nop_();_nop_();_nop_();
- _nop_();_nop_();_nop_();_nop_();
- }
- void delay_ms(unsigned int ms)
- {
- unsigned int a;
- while(ms)
- {
- a=1800;
- while(a--);
- ms--;
- }
- return;
- }
- void lcd_printf(uint8 *s,int temp_data)
- {
- if(temp_data<0)
- {
- temp_data=-temp_data;
- *s='-';
- }
- else *s=' ';
- *++s =temp_data/10+0x30;
- temp_data=temp_data%10;
- *++s =temp_data+0x30;
- }
- void I2C_Start()
- {
- SDA = 1;
- SCL = 1;
- Delay5us();
- SDA = 0;
- Delay5us();
- SCL = 0;
- }
- void I2C_Stop()
- {
- SDA = 0;
- SCL = 0;
- Delay5us();
- SCL = 1;
- Delay5us();
- SDA = 1;
- //Delay5us();
- }
- void I2C_SendACK(bit ack)
- {
- SDA = ack;
- SCL = 1;
- Delay5us();
- SCL = 0;
- Delay5us();
- }
- bit I2C_RecvACK()
- {
- SCL = 1;
- Delay5us();
- CY = SDA;
- SCL = 0;
- Delay5us();
- return CY;
- }
- void I2C_SendByte(uint8 dat)
- {
- uint8 i;
- for (i=0; i<8; i++)
- {
- dat <<= 1;
- SDA = CY;
- SCL = 1;
- Delay5us();
- SCL = 0;
- Delay5us();
- }
- I2C_RecvACK();
- }
- uint8 I2C_RecvByte()
- {
- uint8 i;
- uint8 dat = 0;
- SDA = 1;
- for (i=0; i<8; i++)
- {
- dat <<= 1;
- SCL = 1;
- Delay5us();
- dat |= SDA;
- SCL = 0;
- Delay5us();
- }
- return dat;
- }
- void WriteRegfdc2214(unsigned char add,unsigned int value)
- {
- I2C_Start();
- I2C_SendByte(0X54);
- I2C_SendByte(add);
- I2C_SendByte(value>>8);
- I2C_SendByte(value&0xff);
- I2C_Stop();
- delay_ms(10);
- }
- unsigned int ReadRegfdc2214(unsigned char add)
- {
- unsigned int status;
- unsigned int a,b;
- I2C_Start();
- I2C_SendByte(0X54);
- I2C_SendByte(add);
- I2C_Start();
- I2C_SendByte(0X55);
-
- a=I2C_RecvByte();
- I2C_SendACK(0);
- b=I2C_RecvByte();
- I2C_SendACK(1);
- status=(a<<8)+b;
- I2C_Stop();
-
- return (status);
- }
- void InitSinglefdc2214(void)
- {
- WriteRegfdc2214(0x08,0x0000);
-
- WriteRegfdc2214(0x10,0x0064);
-
-
- WriteRegfdc2214(0x14,0x2001);
- // LDC_Write_Reg(0x0C,0x0F00);
- WriteRegfdc2214(0x19,0x0000);
-
- WriteRegfdc2214(0x1B,0x020D);
- WriteRegfdc2214(0x1E,0xF800);
- WriteRegfdc2214(0x1A,0x1C81);
- }
- void InitMultifdc2214(void)
- {
- WriteRegfdc2214(0x08,0x34FB);
- WriteRegfdc2214(0x09,0x34FB);
- WriteRegfdc2214(0x0A,0x34ff);
- WriteRegfdc2214(0x0B,0x34ff);
-
- WriteRegfdc2214(0x10,0x001B);
- WriteRegfdc2214(0x11,0x001B);
- WriteRegfdc2214(0x12,0x001B);
- WriteRegfdc2214(0x13,0x001B);
-
- WriteRegfdc2214(0x14,0x2002);
- WriteRegfdc2214(0x15,0x2002);
- WriteRegfdc2214(0x16,0x2002);
- WriteRegfdc2214(0x17,0x2002);
-
- WriteRegfdc2214(0x1E,0x7800);
- WriteRegfdc2214(0x1F,0x7800);
- WriteRegfdc2214(0x20,0x7800);
- WriteRegfdc2214(0x21,0x7800);
-
- WriteRegfdc2214(0x0C,0x0000);
- WriteRegfdc2214(0x0D,0x0000);
- WriteRegfdc2214(0x0E,0x0000);
- WriteRegfdc2214(0x0F,0x0000);
-
-
- WriteRegfdc2214(0x19,0x0000);
- WriteRegfdc2214(0x1B,0xC20D);
-
- // LDC_Write_Reg(0x1A,0x1401);
- WriteRegfdc2214(0x1A,0x1401);
- }
������Word��ʽ����Փ��51�����d��ַ��������51��Ƭ�C��stm32 2�����F(xi��n)��������
http://www.raoushi.com/bbs/dpj-130703-1.html
| 

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664