�Y�ϰ���

0.png (46.28 KB, ���d��(sh��): 66)
���d����
2018-8-2 01:07 �ς�
��(sh��)����Ƭ��
0.jpg (69.93 KB, ���d��(sh��): 75)
���d����
2018-8-2 01:08 �ς�
0.jpg (23.51 KB, ���d��(sh��): 55)
���d����
2018-8-2 01:08 �ς�
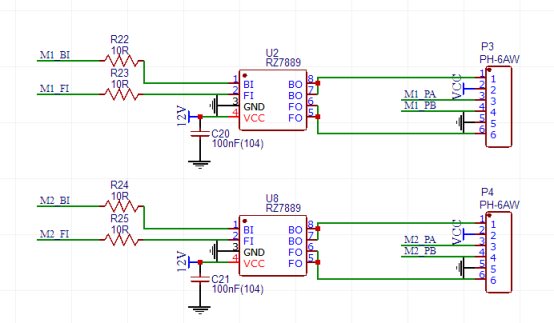
���ܼ��f(shu��)�� - ��·ֱ��늙C(j��)�(q��)��(d��ng)�����{(di��o)�ٺ������D(zhu��n)���ơ�
- ��·�������a���ӿڣ�������늙C(j��)�ٶȷ�����
- 1·USB�D(zhu��n)���ڣ������·�ą���(sh��)�O(sh��)����
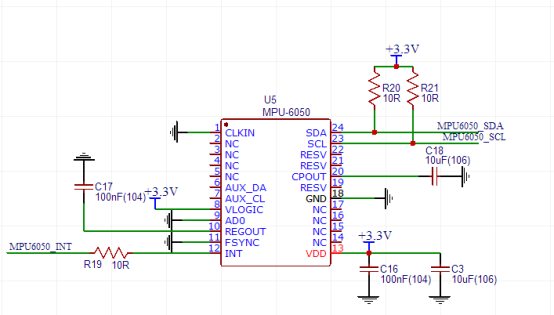
- 6�S�\(y��n)��(d��ng)̎������MPU6050��������ƽ��С܇���_(k��i)�l(f��)��
- �{(l��n)��4.0�ӿ�ģ�K����ͨ�^(gu��)�֙C(j��)�ϵ�app(TTC-BLE)��(du��)늙C(j��)�M(j��n)�м��١��p�١������D(zhu��n)���ơ�
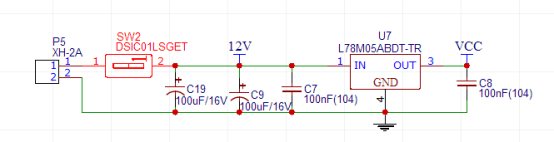
- DC12V��늡�
- 1��(g��)USBָʾ����1��(g��)�{(l��n)��ģ�Kָʾ����2��(g��)�Ñ�ָʾ��(�Ñ��������)��
- 1��(g��)�p�|�_(k��i)�P(gu��n)�����Ñ�����ʹ�á�
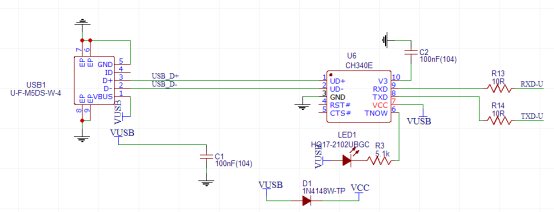
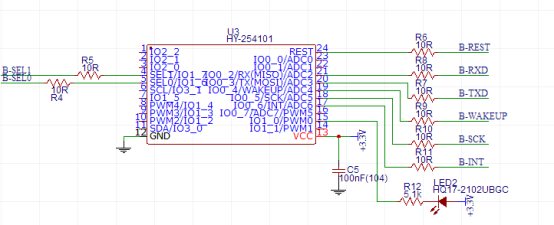
��ģ�K����DC12V��늣���늽ӿ���2�2.54���ӣ������д����ք�(d��ng)�Դ�_(k��i)�P(gu��n)�� 2��USB�ӿ��� USB�ӿڞ�USB�D(zhu��n)���ڣ��x���оƬ��CH340E�������B�ӵ���Ƭ�C(j��)��USART0�ڣ����Ñ�����ʹ�ã�������LEDָʾ���� 3����Ƭ�C(j��)�{(di��o)ԇ�ں�boot�O(sh��)���� GD32F330CBT6��Ƭ�C(j��)���õ�SWD�{(di��o)ԇ�ڣ��_(k��i)�l(f��)�h(hu��n)��MDK��IAR���_(k��i)�l(f��)���ߞ�ST-LINK V2���Y���еij���ɷN�_(k��i)�l(f��)�h(hu��n)����֧�֡��·�Ќ�BOOT0�_��������ͨ�^(gu��)�����_(k��i)�P(gu��n)ȥ�x���Ƭ�C(j��)�Ć���(d��ng)�����ַ����ͨ�^(gu��)�����x��BOOT0�_����USART0��(du��)�Ñ������M(j��n)������(j��)�����w������Ҋ(ji��n)��Ƭ�C(j��)�Ĕ�(sh��)��(j��)�փ�(c��)�� 4��늙C(j��)�(q��)��(d��ng)�· ���·�о���2·늙C(j��)�(q��)��(d��ng)�ӿڣ�ͬ�r(sh��)���Խ�2·�������a��,�Ɍ�(du��)늙C(j��)�D(zhu��n)�ٺͷ���?q��)��r(sh��)�������(q��)��(d��ng)оƬ����RZ7889,һ�� DC �p���R�_(d��)�(q��)��(d��ng)�·�����m������ߵ��늙C(j��)�(q��)��(d��ng)���Ԅ�(d��ng)�y�T늙C(j��)�(q��)��(d��ng)��늴��T�i�(q��)��(d��ng)�ȡ����Ѓɂ�(g��)߉ݔ������Á�(l��i)����늙C(j��)ǰ�M(j��n)�����˼��Ƅ�(d��ng)��ԓ�·�������õĿ��ɔ_�ԣ�С�Ĵ��C(j��)������͵�ݔ����(n��i)�裬ͬ�r(sh��)����߀���Ѓ�(n��i)�ö��O����ጷŸ���ؓ(f��)�d�ķ���_�����������늉�3-15V��늙C(j��)�(q��)��(d��ng)�õ���Ƭ�C(j��)��TIMER15��TIMER16,���a���z�y(c��)�õ���Ƭ�C(j��)��TIMER1��TIMER2�����w������Ҋ(ji��n)���� 5��6�S�\(y��n)��(d��ng)�������· MPU-6050�������ϵ�һ��� 6 �SMotionTracking�O(sh��)�䡣��������3�SMEMS���݃x��3�SMEMS���ٶ�Ӌ(j��)�� MPU-6050Ҳ����ͨ�^(gu��)��I2C�ӿ��B�ӷǑT�ԵĔ�(sh��)�ւ����������牺����������MPU-6050��(du��)���݃x�ͼ��ٶ�Ӌ(j��)�քe��������(g��)16λ��ADC������y(c��)����ģ�M���D(zhu��n)�����ݔ���Ĕ�(sh��)���������˾��_��ۙ���ٺ����ٵ��\(y��n)��(d��ng)���������Ĝy(c��)�����������Ñ��ɿصģ����݃x�ɜy(c��)�������250�� ��500�� ��1000�� ��2000��/�루 dps�������ٶ�Ӌ(j��)�ɜy(c��)�������2�� ��4����8�� ��16g�� ���Բ��ñ��·�е�6�S�\(y��n)��(d��ng)��������2·ֱ��늙C(j��)��������݆ƽ��С܇���_(k��i)�l(f��)�� 6���{(l��n)���ӿ� �{(l��n)���ӿڲ��õ��������ЕN��(r��n)�Ƽ�����˾��HY-254101 V1�{(l��n)��4.0ģ�K��ʹ�ú�(ji��n)�Σ��o(w��)���κ��{(l��n)���f(xi��)�h����(y��ng)�ý�(j��ng)�(y��n)��֧���{(l��n)�����C(j��)���{(l��n)���ęC(j��)���{(l��n)������һ�w���� 3 �N�汾���Ñ��ӿ�ʹ��ͨ�ô����O(sh��)Ӌ(j��)��ȫ�p���p��ͨӍ����Ͳ�����֧�� 9600bps��ͨ�^(gu��)AT���(du��)ģ�K�M(j��n)�п��ƣ��������֙C(j��)�˵�TCC-BLEܛ�����Ժ�ģ�K�M(j��n)�Ќ�(sh��)�r(sh��)ͨ�ſ��ơ�ģ�K��Ԕ��(x��)�Y�υ��ո������Y�ϡ� 7����B(t��i)ָʾ�� ��ģ�K����4��(g��)LEDָʾ�����քe��2��(g��)�Ñ����������ָʾ����CH340E�(q��)��(d��ng)ָʾ�����{(l��n)��ģ�Kָʾ����
��Ƭ�C(j��)Դ��������:
- #include "gd32f3x0.h"
- #include "systick.h"
- #include <stdio.h>
- #include "config.h"
- unsigned char rtemp[6] = {'1','2','3','4','5','6'};
- unsigned char pbuf[20];
- signed short temper;
- signed short ax,ay,az;
- signed short gx,gy,gz;
- /************************************************************************
- ** �� ��(sh��) ��: main
- ** ��������: ������(sh��)
- ** ݔ��?y��n)��?sh��): �o(w��)
- ** ݔ������(sh��): �o(w��)
- ** �� �� ֵ: �o(w��)
- ** �� ��: ����
- ** �� ��: 2018.4
- **------------------------------------------------------------------------
- ** �� ��:
- ** ������:
- *************************************************************************/
- void Rcu_Periph_Clk_Init(void)
- {
- rcu_periph_clock_enable(RCU_GPIOA);
- rcu_periph_clock_enable(RCU_GPIOB);
- rcu_periph_clock_enable(RCU_GPIOC);
- rcu_periph_clock_enable(RCU_GPIOD);
- rcu_periph_clock_enable(RCU_GPIOF);
- rcu_periph_clock_enable(RCU_USART0);
- rcu_periph_clock_enable(RCU_USART1);
- rcu_periph_clock_enable(RCU_TIMER15);
- rcu_periph_clock_enable(RCU_TIMER16);
- rcu_periph_clock_enable(RCU_TIMER1);
- rcu_periph_clock_enable(RCU_TIMER2);
- rcu_periph_clock_enable(RCU_TIMER5);
- }
- /************************************************************************
- ** �� ��(sh��) ��: UserGpio_Config
- ** ��������: IO�ڳ�ʼ��
- ** ݔ��?y��n)��?sh��): �o(w��)
- ** ݔ������(sh��): �o(w��)
- ** �� �� ֵ: �o(w��)
- ** �� ��: ����
- ** �� ��: 2018.4
- **------------------------------------------------------------------------
- ** �� ��:
- ** ������:
- *************************************************************************/
- void UserGpio_Config(void)
- {
- gpio_mode_set(GPIOA, GPIO_MODE_INPUT, GPIO_PUPD_NONE, GPIO_PIN_4);//KEY
- gpio_mode_set(GPIOA, GPIO_MODE_OUTPUT, GPIO_PUPD_NONE, GPIO_PIN_5);//STA2 LED
- gpio_output_options_set(GPIOA, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_5);
- gpio_mode_set(GPIOA, GPIO_MODE_OUTPUT, GPIO_PUPD_NONE, GPIO_PIN_6);//STA1 LED
- gpio_output_options_set(GPIOA, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_6);
-
- //MOTO ���a(b��)PWM ���^(q��)
- gpio_af_set(GPIOB, GPIO_AF_2, GPIO_PIN_6);
- gpio_af_set(GPIOB, GPIO_AF_2, GPIO_PIN_7);
- gpio_af_set(GPIOB, GPIO_AF_2, GPIO_PIN_8);
- gpio_af_set(GPIOB, GPIO_AF_2, GPIO_PIN_9);
- gpio_mode_set(GPIOB, GPIO_MODE_AF, GPIO_PUPD_NONE, GPIO_PIN_6);
- gpio_output_options_set(GPIOB, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ,GPIO_PIN_6);
- gpio_mode_set(GPIOB, GPIO_MODE_AF, GPIO_PUPD_NONE, GPIO_PIN_7);
- gpio_output_options_set(GPIOB, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ,GPIO_PIN_7);
- gpio_mode_set(GPIOB, GPIO_MODE_AF, GPIO_PUPD_NONE, GPIO_PIN_8);
- gpio_output_options_set(GPIOB, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ,GPIO_PIN_8);
- gpio_mode_set(GPIOB, GPIO_MODE_AF, GPIO_PUPD_NONE, GPIO_PIN_9);
- gpio_output_options_set(GPIOB, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ,GPIO_PIN_9);
- //MOTO ���a��
- gpio_af_set(GPIOB, GPIO_AF_1, GPIO_PIN_4);
- gpio_af_set(GPIOB, GPIO_AF_1, GPIO_PIN_5);
- gpio_af_set(GPIOB, GPIO_AF_2, GPIO_PIN_3);
- gpio_af_set(GPIOA, GPIO_AF_2, GPIO_PIN_15);
- gpio_mode_set(GPIOA, GPIO_MODE_AF, GPIO_PUPD_NONE, GPIO_PIN_15);
- gpio_mode_set(GPIOB, GPIO_MODE_AF, GPIO_PUPD_NONE, GPIO_PIN_3);
- gpio_mode_set(GPIOB, GPIO_MODE_AF, GPIO_PUPD_NONE, GPIO_PIN_4);
- gpio_mode_set(GPIOB, GPIO_MODE_AF, GPIO_PUPD_NONE, GPIO_PIN_5);
- }
- /************************************************************************
- ** �� ��(sh��) ��: main
- ** ��������: ������(sh��)
- ** ݔ��?y��n)��?sh��): �o(w��)
- ** ݔ������(sh��): �o(w��)
- ** �� �� ֵ: �o(w��)
- ** �� ��: ����
- ** �� ��: 2018.4
- **------------------------------------------------------------------------
- ** �� ��:
- ** ������:
- *************************************************************************/
- int main(void)
- {
- systick_config();
- Rcu_Periph_Clk_Init();
-
- UserGpio_Config();
- // Usart0_Init();//USART0��ʼ��
- // printf("USART0 Init successfully!");
-
- MotoCtrlPwmInit();
- Encoder_M1_Init();
- Encoder_M2_Init();
- Timer5_Init();
-
- MPU_Init();
- delay_1ms(20);
- temper = MPU_Get_Temperature();
-
- Bluetooth_Init();
- //BluetoothATCmdSend("AT\r\n");
-
- while(1)
- {
-
- //MPU_Get_Accelerometer(&ax,&ay,&az);
- //MPU_Get_Gyroscope(&gx,&gy,&gz);
- //temper = TIMER_CNT(TIMER2);
- //temper = MPU_Get_Temperature();
- }
- }
- /************************************************************************
- ** �� ��(sh��) ��: Delay_us
- ** ��������: us��(j��)�ӕr(sh��)
- ** ݔ��?y��n)��?sh��): us �ӕr(sh��)�r(sh��)�g
- ** ݔ������(sh��): �o(w��)
- ** �� �� ֵ: �o(w��)
- ����������������
- �����������ڱ���ƪ�� ���´��aՈ(q��ng)��51�����d������������
�����Y��51hei�ṩ���d����(n��i)��ԭ��D�cpcb��gd32��Ƭ�C(j��)Դ�a��ȫ���_(k��i)�l(f��)�Y�ϣ�:
 �{(l��n)���ӿڵ�2·ֱ��늙C(j��)�(q��)��(d��ng)��.zip
(14.85 MB, ���d��(sh��): 71)
�{(l��n)���ӿڵ�2·ֱ��늙C(j��)�(q��)��(d��ng)��.zip
(14.85 MB, ���d��(sh��): 71)
2018-8-1 10:30 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5
|





 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664






 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��