Փ���}Ŀ������51��Ƭ�C(j��)����ӳӵ��O(sh��)Ӌ(j��)
��һ�� �����f(shu��)��
���O(sh��)Ӌ(j��)ϵ�y(t��ng)�Ԇ�Ƭ�C(j��)AT89S52����ƺ��ģ���(sh��)�F(xi��n)��ӳӵĻ������ƹ��ܡ����O(sh��)Ӌ(j��)ϵ�y(t��ng)�r(sh��)�����˸��õز���ģ�K���O(sh��)Ӌ(j��)�����ֲ��O(sh��)Ӌ(j��)�˸���(g��)��Ԫ����ģ�K�� ϵ�y(t��ng)��Ӳ�����ְ�����Сϵ�y(t��ng)���֡���(sh��)��(j��)�ɼ����֡��˙C(j��)���������ϵ�y(t��ng)�Դ�Ĵ֡���Сϵ�y(t��ng)������Ҫ����AT89S52�͔U(ku��)չ���ⲿ��(sh��)��(j��)�惦(ch��)������(sh��)��(j��)�ɼ������ɷQ����������̖(h��o)��ǰ��̎����A/D�D(zhu��n)�Q���ֽM�ɣ������\(y��n)��Ŵ���AD620��A/D�D(zhu��n)�Q��ICL7135���˙C(j��)���沿�֞��I�P(p��n)ݔ�룬��λLED��(sh��)�a�@ʾ��������ֱ�^���@ʾ�����ľ��w��(sh��)���Լ������ݔ�딵(sh��)��(j��)��ʹ�÷��㣻ϵ�y(t��ng)�Դ��LM317��LM337������O(sh��)Ӌ(j��)�·���ṩϵ�y(t��ng)���������Դ�� ϵ�y(t��ng)��ܛ�����֑�(y��ng)�Æ�Ƭ�C(j��)C�Z(y��)���M(j��n)�о��̣���(sh��)�F(xi��n)��ԓ�O(sh��)Ӌ(j��)��ȫ�����ƹ��ܡ�ԓ��ӳӿ��Ԍ�(sh��)�F(xi��n)�����ķQ�ع��ܣ��Q�ط�����0��9.999Kg�������`����ڡ�0.005Kg��,���l(f��)�]���ֵ��@ʾُ(g��u)����εĹ��ܣ������O(sh��)�����ں��O(sh��)��ʮ�N��Ʒ�Ćr(ji��)�� ߀���г����̺�Ƿ���̵Ĉ�(b��o)�����ܡ� ��ϵ�y(t��ng)�O(sh��)Ӌ(j��)�Y(ji��)��(g��u)��(ji��n)�Σ�ʹ�÷��㣬�����Rȫ�����ȸߣ�����һ�����_(k��i)�l(f��)�r(ji��)ֵ�� �Q������ԭ�����ɷ�������|(zh��)�����������D(zhu��n)�Q��������D(zhu��n)�QԪ�������ǰ�֧����׃�Q��늵Ļ�������ʽ���m����Ӌ(j��)����ֵ����̖(h��o)���õ�һ�N�o���ֶΡ� ���շQ�������ĽY(ji��)��(g��u)��ʽ��ͬ�����Է�ֱ��λ�Ƃ����������ʽ��늸�ʽ���λӋ(j��)ʽ������ʽ����ǻ�C����ʽ�ȣ��͑�(y��ng)׃����������葪(y��ng)׃ʽ�������C��ʽ���������ôŏ��ԡ���늺͉��������Ч��(y��ng)�Ă������� ��(du��)�Q�������Ļ���Ҫ���ǣ�ݔ������cݔ���������ֆ�ֵ��(du��)��(y��ng)���������õľ����P(gu��n)ϵ�����^�ߵ��`���ȣ���(du��)���Q���w�Ġ�B(t��i)��Ӱ�ҪС�������^��Ĺ����l���¹��������^�õ��l����ԣ���(w��n)���ɿ��� �������µĶ��x�ǣ����ܸ���Ҏ(gu��)���ı��y(c��)��������һ����Ҏ(gu��)���D(zhu��n)�Q�ɿ�����̖(h��o)���������b�ã�ͨ��������Ԫ�����D(zhu��n)�QԪ���M�ɡ�����������Ԫ��ָ?j��ng)���������ֱ�Ӹ��ܱ��y(c��)���IJ��֣��D(zhu��n)�QԪ��ָ?j��ng)��������܌�����Ԫ��ݔ�����D(zhu��n)�Q���m�ڂ�ݔ�͜y(c��)�������̖(h��o)���֡������������һ�N�z�y(c��)�b�ã��ܸ��ܵ����y(c��)������Ϣ�����܌��z�y(c��)���ܵ�����Ϣ����һ��Ҏ(gu��)��׃�Q�ɞ����̖(h��o)������������ʽ����Ϣݔ�����ԝM����Ϣ�Ă�ݔ��̎�����惦(ch��)���@ʾ��ӛ䛺Ϳ��Ƶ�Ҫ�����nj�(sh��)�F(xi��n)�Ԅ�(d��ng)�z�y(c��)���Ԅ�(d��ng)���Ƶ���Ҫ�h(hu��n)��(ji��)�� �Q����������ӳ���ռ��ʮ����Ҫ��λ�ã���������ӳӵ����K�������������ܺÉĺܴ�̶��ϛQ������ӳӵľ��_�Ⱥͷ�(w��n)���ԡ�ͨ���Q�������a(ch��n)�����`��sռ��ӳ����C(j��)�`���50%~70%�����ڭh(hu��n)�����ӵėl���£���ߵ͜ء���ᣩ����������ռ���`�����������ˣ����˂�?c��)O(sh��)Ӌ(j��)��ӳӕr(sh��)�����_���x�÷Q�������dz���Ҫ�� �Q�������ķN�(l��i)�ܶ࣬����(j��)����ԭ���(l��i)�ֳ��õ������N�� ��葪(y��ng)׃ʽ�����ʽ������ʽ�����ʽ���C��ʽ�ȡ������O(sh��)Ӌ(j��)���õ�����葪(y��ng)׃ʽ�� ��葪(y��ng)׃ʽ�Q�����������ɂ�(g��)��Ҫ���֣�һ��(g��)�Ǐ�������Ԫ���������������y(c��)�������D(zhu��n)�Q�鏗���w�đ�(y��ng)׃ֵ����һ��(g��)����葪(y��ng)׃Ӌ(j��)�����������Ԫ���������w�đ�(y��ng)׃��ͬ�����D(zhu��n)�Q�����ֵ��׃������葪(y��ng)׃Ƭ�����ܵęC(j��)е��(y��ng)׃��һ���10 - 6~10 - 2���S֮���a(ch��n)�������׃����Ҳ��s��10 - 6~10 - 2��(sh��)����(j��)֮�g���@��С�����׃����һ��y(c��)�����ăx�����y�y(c��)������횲���һ����ʽ�Ĝy(c��)���·��С�����׃�����D(zhu��n)׃��늉��������׃���������ö��x���@ʾ����(l��i)������葪(y��ng)׃ʽ�Q��������ͨ�^(gu��)��ʽ�·������׃���D(zhu��n)�Q��늉�׃������葪(y��ng)׃ʽ�Q����������ԭ����D��D2-1��ʾ��  �d��P ��(y��ng)׃ �d��P ��(y��ng)׃ ���׃�� ���׃�� R ݔ��늉� R ݔ��늉� ��D2-2��葪(y��ng)׃ʽ�Q����������ԭ����D 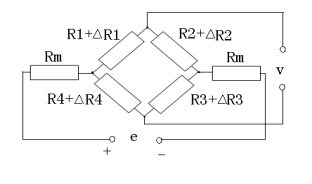
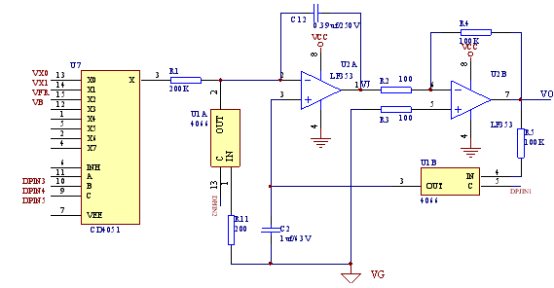
��(d��ng)�����������d�ɕr(sh��)����������Ԫ�����a(ch��n)����(y��ng)׃��ճ�N�����ϵđ�(y��ng)׃Ƭ���l(f��)��׃�Σ���ֵ��׃��늘�ƽ�⣬ݔ��늉����㣻��(d��ng)�����������r(sh��)������������Ԫ�����d��P�r(sh��)����(y��ng)׃Ƭ�͕�(hu��)�l(f��)��׃�Σ���ֵ�l(f��)��׃����늘�ʧȥƽ�⣬��ݔ��늉��� ��D2-3 ��ʽ�y(c��)���· R1��R2��R3��R4��4��(g��)��(y��ng)׃Ƭ��裬�M���˘�ʽ�y(c��)���·��Rm��ض��a(b��)����裬e�鼤��(l��)늉���V��ݔ��늉��� �������]Rm���ڑ�(y��ng)׃Ƭ���׃����ǰ��늘��ݔ��늉��飺 V= ���ژ�۵���ʼ���ȫ�ȣ���R1 = R2 = R3 = R4 = R������V=0 �� ��(d��ng)��(y��ng)׃Ƭ�����R1��R2��R3��R4׃��R+��R1��R+��R2��R+��R3��R+��R4�r(sh��)��늘��ݔ��늉�׃?y��u)�?/font> V= ͨ�^(gu��)����(ji��n)����ʽ�t׃?y��u)�?/font> V=  Ҳ�����f(shu��)��늘�ݔ��늉���׃���c�������׃���ʵĴ���(sh��)�ͳ����ȡ� ����Ă�(g��)��ۑ�(y��ng)׃Ƭ���`��ϵ��(sh��)��ͬ���� = K�ţ��t��ʽ�ֿɌ�(xi��)�ɣ� = K�ţ��t��ʽ�ֿɌ�(xi��)�ɣ� V= ��1 - ��2 + ��3 - ��4 �� ��1 - ��2 + ��3 - ��4 �� ʽ��K�鑪(y��ng)׃Ƭ�`��ϵ��(sh��)���Ş鑪(y��ng)׃���� ��ʽ������늘��ݔ��늉����Ă�(g��)�I�۵đ�(y��ng)׃Ƭ�����ܵđ�(y��ng)׃���Ĵ���(sh��)�ͳ����ȡ�����葪(y��ng)׃ʽ�Q�������У�4��(g��)��(y��ng)׃Ƭ�քe�N�ڏ�������4��(g��)���в�λ���������������ú�l(f��)��׃�Ρ������������£�R1��R3�����죬��ֵ����R1����R3��ֵ��R2��R4�����s����ֵ�pС����R2����R4��ؓ(f��)ֵ���ټ�֮��(y��ng)׃Ƭ��ֵ׃���Ľ^��(du��)ֵ��ͬ���� ��R1 = ��R3 = + ��R���1 = ��3 = +�� ��R2 = ��R4= - ��R���2 = ��4 = - �� ��ˣ�V= ��4�� = e K�š������] Rm���t늘��ݔ��늉�׃�ɣ� ��4�� = e K�š������] Rm���t늘��ݔ��늉�׃�ɣ� V=  =  = =  K ��e K ��e ��SU =  ���tSU = K �� ���tSU = K �� SU�Q�������ϵ��(sh��)�������ݔ���`���ȡ� ��(du��)��һ��(g��)�߾��ȵđ�(y��ng)׃��������(l��i)�f(shu��)���H�H��4��(g��)��(y��ng)׃Ƭ�M�ɘ�ʽ�y(c��)���·߀���h(yu��n)�h(yu��n)����ġ����ڏ��������Ͻ���M���IJ������Լ���̎����ˇ����(y��ng)׃Ƭ���ܼ�ճ�N��ˇ���ض�׃�������ص�Ӱ푣���������(sh��)�خa(ch��n)��һ�����`����˜p�ق������S�ض�׃���a(ch��n)�����`�����侫�Ⱥͷ�(w��n)���ԣ���Ҫ�ژ�·�ɶ˺͘���д���һЩ�a(b��)��Ԫ�����磺��ʼ��ƽ��ֵ���a(b��)�������dݔ���ض��a(b��)����ݔ���`���Ȝض��a(b��)��?sh��)ȡ?/font> �ڶ��� ϵ�y(t��ng)���w�O(sh��)Ӌ(j��)
2.1 ��ӳ��O(sh��)Ӌ(j��)��Ҫ��- �Q�ط����������^(gu��)9.999Kg
- �y(c��)�����ȣ��� 0.005Kg
- �@ʾ��ʽ��LCD�@ʾ���Q������Ʒ������ͬ�r(sh��)߀���@ʾ��Ʒ�����Q����(sh��)�����r(ji��)�����~��������Ʒ�Ŀ����~��
- ʹ�ò������I�P(p��n)ݔ�딵(sh��)��(j��)��������(ji��n)�η��㡣
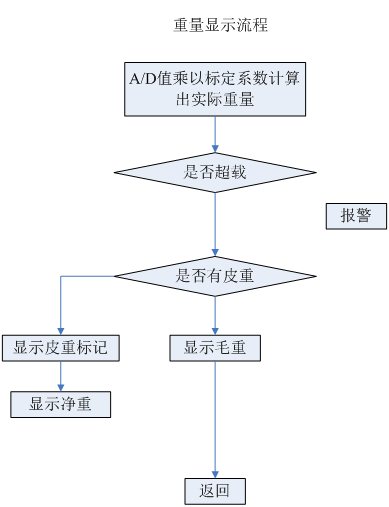
- ����ܣ�����ȥƤ�����Լ��܌����~�ۼ�Ӌ(j��)�㣻��(d��ng)��Ʒ�������^(gu��)��ӳ����̣����^(gu��)�d��r��������Ʒ����С��A/D�D(zhu��n)�Q�������D(zhu��n)�Q����С���ȣ���Ƿ���̵ĕr(sh��)���г��؈�(b��o)�����ܡ�
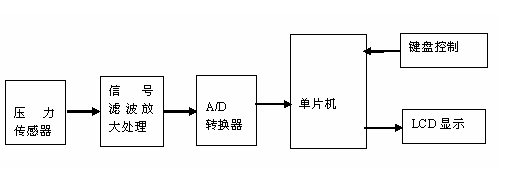
2.2��ӳ��O(sh��)Ӌ(j��)�Ļ���˼· ����ӳӴ����܄��֞����֣���(sh��)��(j��)�ɼ�ģ�K��������ģ�K���˙C(j��)��������ģ�K�����Д�(sh��)��(j��)�ɼ�ģ�K�ɉ�������������̖(h��o)��ǰ��(j��)̎����A/D�D(zhu��n)�Q���ֽM�ɡ��D(zhu��n)�Q��Ĕ�(sh��)����̖(h��o)�ͽo������̎�����ɿ�������Ɍ�(du��)ԓ��(sh��)������̎�����(q��)��(d��ng)�@ʾģ�K����˙C(j��)�g����Ϣ���Q������������һ��(g��)�^(gu��)�d��Ƿ����(b��o)����ʾ������ܡ� ��D2-1���ψD�鱾ϵ�y(t��ng)���O(sh��)Ӌ(j��)�D�� 2.3��Ƭ�C(j��)���x��AT89S52��Ƭ�C(j��)��AT89Sϵ���е�����(qi��ng)�ߙn�C(j��)�a(ch��n)Ʒ����Ƭ��(n��i)�惦(ch��)��������AT89S51��һ������Ƭ��(n��i)8KB��Flash����惦(ch��)����256B��RAM�����⣬��߀������һ��(g��)���ܘO��(qi��ng)�ġ����Ъ�(d��)�ؑ�(y��ng)�õ�16λ���r(sh��)��Ӌ(j��)��(sh��)��2�ȶ�N���ܡ��ڹ��̑�(y��ng)����AT89S52��һ�@���ă�(y��u)��(sh��)������Ҫ����(xi��)����ֻ����PC �C(j��)�IJ���ݔ���͘O�麆(ji��n)�ε����d�·����Ɍ�����ͨ�^(gu��)���з�ʽ��(xi��)���Ƭ�C(j��)���������d�·���O(sh��)Ӌ(j��)��ϵ�y(t��ng)�У������S�r(sh��)�Ć�Ƭ�C(j��)��ܛ��������(du��)Ӳ�����κθĄ�(d��ng)�� �ɴˣ�ͨ�^(gu��)��(du��)Ŀǰ������̖(h��o)�ı��^���҂���K�x����AT89S52ͨ�õ���ͨ��Ƭ�C(j��)��(l��i)��(sh��)�F(xi��n)ϵ�y(t��ng)�O(sh��)Ӌ(j��)��AT89S52��һ�N����MCS51������������늉�4.0V��5.5V��ȫ�o�B(t��i)�r(sh��)�0 Hz ��33 MHz������(j��)������ܣ�32��(g��)�ɾ���I/O�ڣ�2/3��(g��)16λ���r(sh��)/Ӌ(j��)��(sh��)����6/8��(g��)�Д�Դ��ȫ�p������ͨӍ�ڣ�����֧��Idle��Power-downģʽ��Power downģʽ֧���Д�����, ���T(m��n)�����r(sh��)�����p��(sh��)��(j��)ָᘣ���늏�(f��)λ��(bi��o)־����������U(ku��)չ��32K��(sh��)��(j��)�惦(ch��)�����ԝM��ϵ�y(t��ng)Ҫ�� 2.4 A/D�D(zhu��n)�Q����B A/D�D(zhu��n)�Q����һ�N�ܰ�ݔ��ģ�M늉������-���c�������ȵĔ�(sh��)������Ҳ�����f(shu��)�ܰѱ��،�(du��)��ĸ��Nģ�M��Ϣ׃��Ӌ(j��)��C(j��)�����R(sh��)�e�Ĕ�(sh��)����Ϣ��A/D�D(zhu��n)�Q���N�(l��i)�^�࣬��ԭ���Ͽɷ֞��ķN���p�e��ʽA/D�D(zhu��n)�Q������αƽ�ʽA/D�D(zhu��n)�Q��������A/D�D(zhu��n)�Q����Ӌ(j��)��(sh��)��ʽA/D�D(zhu��n)�Q������������A/D�D(zhu��n)�Q��������ӳӵ��O(sh��)Ӌ(j��)���õı��^������p�e��ʽA/D�D(zhu��n)�Q���͡�������A/D�D(zhu��n)�Q���� �p�e��ADC�Ļ���ԭ���nj�(du��)ݔ��ģ�M늉��ͅ���늉��քe�M(j��n)�Ѓɴηe�֣���ݔ��늉�ƽ��ֵ׃���c֮�����ȵĕr(sh��)�g�g����Ȼ�����Õr(sh��)��}�_��Ӌ(j��)��(sh��)���y(c��)���˕r(sh��)�g�g�����M(j��n)���õ�����(y��ng)�Ĕ�(sh��)����ݔ������D2-6��ʾ����ӳ��г��õ��p�e��ʽA/D�D(zhu��n)�Q�·�����ɷe���������^����ģ�M����_(k��i)�P(gu��n)���e����衢�e����ݡ��Ԅ�(d��ng)������衢��ݽM�ɡ�����VG��ģ�M�أ�VFR�ǻ���(zh��n)늉�������(du��)��VG��ؓ(f��)ֵ����VX�Ǚz�y(c��)늉��� ��D2-6���p�e��A/D�D(zhu��n)�Q�· ����p�e����A/D�D(zhu��n)�Q�����к�(qi��ng)�Ŀ��ɔ_��������(du��)��ؓ(f��)��(du��)�Q�Ĺ��l�ɔ_��̖(h��o)�e�֞��㣬���Ԍ�(du��)50HZ�Ĺ��l�ɔ_���������؏�(qi��ng)����(du��)���ڹ��l�ɔ_��������늉���Ҳ�������õĞV�����á�ֻҪ�ɔ_늉���ƽ��ֵ���㣬��(du��)ݔ���Ͳ��a(ch��n)��Ӱ푡����䌦(du��)��ϵ�y(t��ng)������׃���ĉ�����̖(h��o)���������ܵ����l��̖(h��o)��Ӱ푡��ʶ������p�e����A/D�D(zhu��n)�Q���ɴ�͌�(du��)�V���·��Ҫ�� ������ӳӣ�ϵ�y(t��ng)��(du��)AD���D(zhu��n)�Q�ٶ�Ҫ���ߣ�������14λ��AD���ԝM��Ҫ�������p�e����A/D�D(zhu��n)�Q���^��(qi��ng)�Ŀ��ɔ_�������;��_�IJ��ݔ�룬�����ăr(ji��)����K�x���˾��Ȟ�10Kg/  20000= 0.5g��ICL7135�� 20000= 0.5g��ICL7135�� 2.5�I�P(p��n)ݔ���I�P(p��n)ݔ�����˙C(j��)������������Ҫ�ĽM�ɲ��֣�����ϵ�y(t��ng)�����Ñ�ָ���ֱ��;�����I�P(p��n)�������ɂ�(g��)���I�_(k��i)�P(gu��n)�M�ɣ��I�Ķ��ٸ���(j��)��Ƭ�C(j��)��(y��ng)��ϵ�y(t��ng)����;�������I�P(p��n)���S���I�M�ɣ�ÿһ��(g��)�I�ஔ(d��ng)��һ��(g��)�C(j��)е�_(k��i)�P(gu��n)�|�c(di��n)����(d��ng)�I���r(sh��)���|�c(di��n)�]�ϣ���(d��ng)�I���_(k��i)�r(sh��)���|�c(di��n)���_(k��i)����Ƭ�C(j��)���յ����I���|�c(di��n)��̖(h��o)��������(y��ng)�Ĺ���̎������ˣ�����(du��)�چ�Ƭ�C(j��)ϵ�y(t��ng)��(l��i)�f(shu��)�I�P(p��n)�ӿ���̖(h��o)��ݔ����̖(h��o)�� ZLG7289����������Ƭ�C(j��)��˾�O(sh��)Ӌ(j��)�Ĵ���ݔ��ݔ���ɾ����I�P(p��n)�@ʾоƬ���Џ�(qi��ng)����I�P(p��n)�@ʾ���ܣ�֧��64�I���ƣ����Ա��^�����?c��i)U(ku��)չϵ�y(t��ng)������ZLG7289��(n��i)�����g�a�·�����(ji��n)���˳�����K�x��ZLG7289�����I�P(p��n)�����@ʾоƬ�� 2.6ݔ���@ʾ���ÿ����O(sh��)���@ʾ�r(ji��)�����~�����ģ�ُ(g��u)�����ڵȵ�LCD�������е��ġ���ҕ���(hu��)���Ѻü����ɔ_������(qi��ng)�ȹ��ܣ����@ʾ���g(sh��)�ѵõ��V����(y��ng)�á� LCD �@ʾ���Ĺ���ԭ����Һ���@ʾ������Ҫ������Һ�B(t��i)���w�������ض��Ĝضȷ�����(n��i)���Ⱦ���Һ�w������(d��ng)�ԣ��־��о��w��ijЩ��W(xu��)���ԣ������Ⱥ��ɫ�S늈�(ch��ng)���ň�(ch��ng)�����նȵ����l��׃����׃������ˣ���Һ�������@ʾ�������Ϳ������V���l����׃����ӳ����(l��i)�Ķ��γɬF(xi��n)��(sh��)��Ч���� �mȻZLG7289���п��Ɣ�(sh��)�a���@ʾ�Ĺ��ܣ������]�����}ĿҪ�������@ʾ����(sh��)�a�ܟo(w��)���M�㣬ֻ�ܿ��]�Î��������֎�(k��)��Һ���@ʾ�������ڿ��Է��(y��)�@ʾ���o(w��)��̫����Ļ����K�x���c(di��n)�ʽ128��64��LCD��OCM4x8C�� �� ������ Ӳ���O(sh��)Ӌ(j��)�c���� 3.2�����·���O(sh��)Ӌ(j��)P1�ں�P2.0��P2.6�������ַ����������P1������͵�ַ���͔�(sh��)��(j��)������(f��)�ã�P2.0��P2.6�����ߵ�ַ����P2.7����62256��Ƭ�x���ƿ�����ALE���i����74LS373��ʹ�ܶˡ�P3.6��P3.7�����ⲿ��(sh��)��(j��)�惦(ch��)����(xi��)/�x�xͨ��̖(h��o)ݔ���˷քe��62256��/WE��/OE�ˡ� �����·�D���£� ��D3-2 �����·�O(sh��)Ӌ(j��)�D 3.3��̖(h��o)̎���· ����V���Ŵ��·�D�� ��D3-3 ��̖(h��o)�V���Ŵ�D �ψD�����C5��C6�Á�(l��i)�V���ɘ���̖(h��o)늉��еĸ��l�����x��0.1uF����ͨ��(d��)ʯ��ݣ����C7��C84�Á�(l��i)�V���ɘ���̖(h��o)늉��еĵ��l�����x��22uF����ͨ��(d��)ʯ��ݡ����R3��R4�x���^С����ֵ����?y��n)�ɘ����?h��o)늉�ֵֻ�к�����(j��)����������ֵ����̫��t��(d��o)�·Ŵ�������ݔ�����̫С���Ŵ�Ч�������@�� ����̖(h��o)Vi1��Vi2���քe�Ŵ���AD620�ĵ�6�_ݔ����A/D�D(zhu��n)�Q��ICL7135��ݔ��늉�׃��������-2V��+2V����������ݔ��늉���̖(h��o)��0��20mv���ң���˷Ŵ����ķŴ�(sh��)��200��300���ң��Ɍ�R9�ӳ�1K�Ļ���(d��ng)׃����������ICL7135��(du��)���l�ɔ_�����У����ԞV���·��Ҫᘌ�(du��)���l����ʹ��C������ĸɔ_����?y��n)鉺�����?h��o)׃��ʮ�־��������ԞV���·�����l�����úܵ͡� �D�е�LM741��ݔ�����cAD620�ĵض����B��LM741��2�_�c6�_���B��(g��u)��늉����S����R15�c��ؓ(f��)�Դ��ӣ�ͨ�^(gu��)��׃R15����ֵ��ʹVO�c RET֮�g�ĉ���׃�����Ķ���(sh��)�F(xi��n)�{(di��o)�㡢ȥƤ�Ĺ��ܡ� ICL7135�c��Ƭ�C(j��)�Ľӿ� ���xȡA/D�D(zhu��n)�Q��ĽY(ji��)���r(sh��)���x�Ô�(sh��)��(j��)�x�������锵(sh��)��(j��)�xȡ�Ŀ��������@�Ӻ�(ji��n)����ICL7135�c��Ƭ�C(j��)�Ľӿ��·������Ӳ���O(sh��)Ӌ(j��)�cܛ�����̵Č�(sh��)�F(xi��n)�� ��ICL7135�M(j��n)��A/D�D(zhu��n)�Q�Y(ji��)����ݔ����/STRBؓ(f��)�}�_����AT89S52�Дࡣͬ�r(sh��)�ڵ�һ��(g��)/STBؓ(f��)�}�_�r(sh��)��ܛ����P1.7����0�����ʹS=0��ʹ74LS157��Y ��1Y��2Y��3Y��4Y��=A��4A��3A��2A��1A����AT89S52�xP1.0��P1.3�ڱ��x��BCD�a���˕r(sh��)D5=1���˺� D4��D3��D2��D1݆���顰1���������x��ǧλ����λ��ʮλ�͂�(g��)λ��BCD�a�� ǰ����̖(h��o)̎���·�O(sh��)Ӌ(j��)���D�� ��D3-4����̖(h��o)��(sh��)ģ�D(zhu��n)�Q�D ICL7135��ݔ���r(sh��)��D�� ��D3-5��ݔ���r(sh��)��D ��A/D�D(zhu��n)�Q�Y(ji��)������������ݔ���i����������ؒ���ݔ��BCD�a����A/D�D(zhu��n)�Q���gBUSY����ƽ���D(zhu��n)�Q�ꮅ��BUSY׃?y��u)���ƽ��A/D�D(zhu��n)�Q�Y(ji��)������������B�m(x��)�����ݔ��λ�(q��)��(d��ng)��̖(h��o)D5��D4��D3��D2��D1���������}�_������(d��ng)D5����ƽ�r(sh��)��B8��B4��B2��B1���f(w��n)λBCD�a��ͬ�Ӯ�(d��ng)D4����ƽ�r(sh��)��B8��B4��B2��B1��ǧλBCD�a��ͬ��D3��D2��D1 �����}�_�r(sh��)����(du��)��(y��ng)�١�ʮ����(g��)λ��BCD�a����A/D�D(zhu��n)�Q�ꮅ��߀�B�m(x��)ݔ��5��(g��)/STBؓ(f��)�}�_�������քeλ��D5��D4��D3��D2��D1���}�_�����g���}�_���Ȟ�T(m��n)/2�� ���O(sh��)Ӌ(j��)�r(sh��)��߀���]�^(gu��)ʹ����һ�N�ӿ��·����������\(y��n)����ICL7135 �ء�Busy���˹��ܣ�ֻҪһ��(g��)I/O�ں͆�Ƭ�C(j��)��(n��i)����һ��(g��)���r(sh��)���Ϳɰ�ICL7135�Ĕ�(sh��)��(j��)���ˆ�Ƭ�C(j��)�����Թ�(ji��)ʡ�����Ć�Ƭ�C(j��)�YԴ���pСϵ�y(t��ng)���w�e��ԭ�����£� ��Busy��ݔ���ˣ�ICL7135��21�_�����ƽ�Č��ȵ��ڷe�ֺͷ��e�֕r(sh��)�g֮�͡�ICL7135��(n��i)��Ҏ(gu��)���e�֕r(sh��)�g�̶���10001��(g��)�r(sh��)��}�_�r(sh��)�g�����e�֕r(sh��)�g�L(zh��ng)���c���y(c��)늉��Ĵ�С�ɱ�����������Æ�Ƭ�C(j��)��(n��i)����Ӌ(j��)��(sh��)����(du��)ICL7135�ĕr(sh��)��}�_Ӌ(j��)��(sh��)������"Busy"����Ӌ(j��)��(sh��)���T(m��n)����̖(h��o)������Ӌ(j��)��(sh��)��ֻҪ��Busy����ƽ�r(sh��)Ӌ(j��)��(sh��)�����@��Busy���ƽ�r(sh��)�g��(n��i)Ӌ(j��)��(sh��)��Ӌ(j��)�ă�(n��i)�ݜpȥ10001��������(sh��)���ڱ��y(c��)늉��Ĕ�(sh��)ֵ�� 3.3�˙C(j��)��������ģ�K�O(sh��)Ӌ(j��)3.3.1�I�P(p��n)ݔ������·���3-2 ZLG7289���_�f(shu��)�� | | | | | | | | | | | | | | Ƭ�xݔ��˴����_����ƽ�r(sh��)����оƬ�l(f��)��ָ��xȡ�I�P(p��n)��(sh��)��(j��) | | | ͬ���r(sh��)�ݔ�����оƬ�l(f��)�͔�(sh��)��(j��)���xȡ�I�P(p��n)��(sh��)��(j��)�r(sh��)�����_�ƽ�����ر�ʾ��(sh��)��(j��)��Ч | | | ���Д�(sh��)��(j��)ݔ��/ݔ���ˮ�(d��ng)оƬ����ָ��r(sh��)�����_��ݔ��ˮ�(d��ng)�xȡ�I�P(p��n)��(sh��)��(j��)�r(sh��)�����_���xָ�����һ��(g��)�r(sh��)犵��½���׃?y��u)�ݔ���?/div> | | | ���I��Чݔ����ƽ�r(sh��)����ƽ��(d��ng)�z�y(c��)����Ч���I�r(sh��)�����_׃?y��u)����?/div> | | | ��g~��a �(q��)��(d��ng)ݔ�� | | | С��(sh��)�c(di��n)�(q��)��(d��ng)ݔ�� | | | ��(sh��)��0 ��(sh��)��7 �(q��)��(d��ng)ݔ�� | | | | | | | | | |
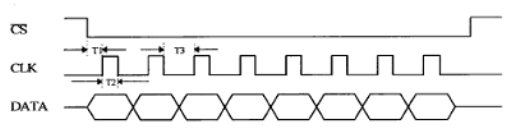
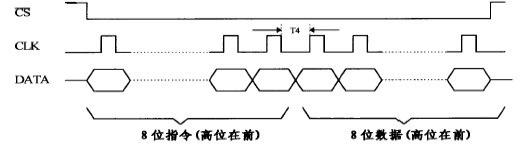
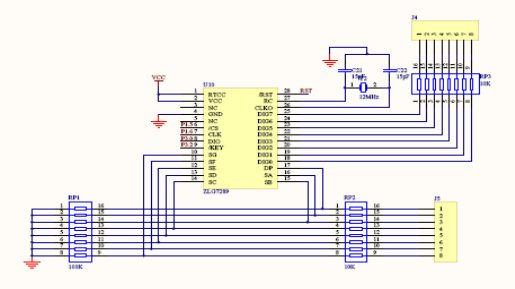
SPI���нӿڹ�����ʽ��B�� ZLG7289 ���ô��з�ʽ�c̎����ͨӍ,���Д�(sh��)��(j��)��DATA ���_����оƬ������CLK ��ͬ������(d��ng)Ƭ�x��̖(h��o)׃?y��u)���ƽ��DATA ���_�ϵĔ�(sh��)��(j��)��CLK ���_�������ر���(xi��)��ZLG7289 �ľ��_�Ĵ����� ZLG7289 ��ָ��Y(ji��)��(g��u)�����N�(l��i)�ͣ� 1��������(sh��)��(j��)�ļ�ָ�ָ��Č��Ȟ�8 ��(g��)BIT ��̎������l(f��)��8��(g��)CLK �}�_�� ��D3-6 ��ָ��r(sh��)��D 2�����Д�(sh��)��(j��)��ָ��Ȟ�16 ��(g��)BIT ��̎������l(f��)��16 ��(g��)CLK �}�_�� ��D3-7 ����(sh��)��(j��)ָ��r(sh��)��D 3���xȡ�I�P(p��n)��(sh��)��(j��)ָ��Ȟ�16��(g��)BIT��ǰ8��(g��)��̎�����l(f��)�͵�ZLG7289��ָ���8 ��(g��)BIT��ZLG7289���ص��I�P(p��n)���a����(zh��)�д�ָ��r(sh��)ZLG7289��DATA���ڵ�9��(g��)CLK �}�_��������׃?y��u)�ݔ����B(t��i)���c��16��(g��)�}�_���½��ػ֏�(f��)��ݔ���B(t��i)���ȴ�������һ��(g��)ָ� �D3-8 �x�I�P(p��n)ָ��r(sh��)��D �D���·�D�� �D3-9 �I�P(p��n)�ӿڈD �D��P1.5�ڽ�/CS��P1.6�ڽ�CLK��P1.0�ڽ�DIO��P3.2�ڽ�/KEY�������Д�0֪ͨAT89S52�x��(sh��)�� �I�P(p��n)����оƬZLG7289 �����I�P(p��n)�Ē��裬��(d��ng)�O(ji��n)�y(c��)�����I���º�ZLG7289 ��9�_��a(ch��n)��һ��(g��)���ƽ֪ͨ��Ƭ�C(j��)����Ƭ�C(j��)���Բ��ò�ԃ�����Дʽ����(sh��)��(j��)ͨ�^(gu��)P3.0���Դ��з�ʽ�x�롣��?y��n)��ԃ��ʽ�?hu��)���M(f��i)�����ĕr(sh��)�g�����Ա�ϵ�y(t��ng)���õ����Дʽ�� 2�� ����(sh��)�x������ 8ֻ��������8 ֻ�I�P(p��n)�B��λ�x��DIG0��DIG7 ��8 ֻλ�x��葪(y��ng)���һ���ı����P(gu��n)ϵ��������葪(y��ng)����λ�x����5 ����С����50 ��������ֵ��10 ������������ȡֵ������10K��100K�� λ�x����ȡֵ������1K��10K������ȡ��������10K����������100K�� ZLG7289��Ҫһ��Ӿ��w��ʎ�·��ϵ�y(t��ng)����,�����ֵ�քe��F=16MHz C=15pF����(sh��)�Hʹ�Õr(sh��)ȡF=12MHz��C=15pF�� 3.3.2 LCD�@ʾ�·OCM4x8C�Ǿ��д�/���ӿڣ����(n��i)�����������֎�(k��)�ĈD���c(di��n)�Һ���@ʾģ�K��ԓģ�K�Ŀ���/�(q��)��(d��ng)�������_(t��i)������(chu��ng)��ӹ�˾��ST7920����������^��(qi��ng)�Ŀ����@ʾ���ܡ�OCM4x8C��Һ���@ʾ����128��64�c(di��n)ꇣ����@ʾ4�С�ÿ��8��(g��)�h�֡����˱��ں�(ji��n)�Ρ�������@ʾ�h�֣�ԓģ�K��2Mb����������CGROM��ԓ����ROM�к���8192��(g��)16��16�c(di��n)������֎�(k��)��ͬ�r(sh��)�����˱���Ӣ�ĺ����������ַ����@ʾ������16Kb��16��8�c(di��n)ꇵ�ASCII�ַ���(k��)������ژ�(g��u)���Ñ�D�Σ��ṩ��һ��(g��)64��256�c(di��n)ꇵ�GDRAM�L�D�^(q��)���Ҟ��˱��ژ�(g��u)���Ñ��������ͣ��ṩ��4�M16��16�c(di��n)ꇵ����ֿ��g�������������ܣ�OCM4x8C�Ɍ�(sh��)�F(xi��n)�h�֡�ASCII�a���c(di��n)ꇈD�Ρ��������w��ͬ���@ʾ������ںͶ�N̎��������Ƭ�C(j��)�ӿڣ�ģ�K�ṩ��4λ���С�8λ���С�2�����С�3�����ж�N�ӿڷ�ʽ�� ԓģ�K����2.7V��5.5V�Č�����늉��������Ҿ���˯�ߡ����������Ĺ���ģʽ���ɝM��ϵ�y(t��ng)���N����늉�����yʽ�x�����ĵ�Ҫ��Һ��ģ�K�@ʾؓ(f��)늉���Ҳ��ģ�K�ṩ���Ķ���(ji��n)����ϵ�y(t��ng)�Դ�O(sh��)Ӌ(j��)��ģ�Kͬ�r(sh��)߀�ṩLED�����@ʾ���ܡ�����֮�⣬ģ�K߀�ṩ�ˮ�(hu��)��������Θ�(bi��o)�@ʾ/�[�ء��Θ�(bi��o)�wλ���@ʾ���_(k��i)/�P(gu��n)�]���@ʾ�ַ��W�q���Θ�(bi��o)��λ���@ʾ��λ����ֱ��(hu��)�����D(zhu��n)�������@ʾ��Һ��˯��/���ѡ��P(gu��n)�]�@ʾ�Ȳ���ָ� ���3-3���_�����f(shu��)�� | | | | | | | | | | | | | | H����(sh��)��(j��)��L��ָ�� | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
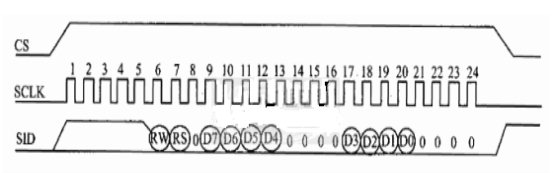
�·�D��PSB�ӵ��ƽ���M(j��n)�봮�нӿ�ģʽ�����Д�(sh��)��(j��)��SID��P3.1�ڣ����Еr(sh��)犾�SCLK��P1.6��RS�̶��Ӹ��ƽ���˞���Ͷ�������ģʽ�� �ַ��@ʾRAM��ַ�c�ַ��@ʾλ���P(gu��n)ϵ�� ���3-4 RAM��ַ�c�ַ��@ʾλ���P(gu��n)ϵ 2/3�����нӿڷ�ʽ�� ��(d��ng)ģ�K��PSB�_�ӵ��ƽ�r(sh��)��ģ�K���M(j��n)�봮�нӿ�ģʽ������ģʽʹ�ô��Д�(sh��)��(j��)��SID�c���Еr(sh��)犾�SCLK��(l��i)���͔�(sh��)��(j��)������(g��u)��2������ģʽ�� OCM4x8C߀���Sͬ�r(sh��)�������(g��)Һ���@ʾģ�K����ɶ�·��Ϣ�@ʾ���ܡ��˕r(sh��)��Ҫ����Ƭ�x�ˡ�CS����(g��u)��3�����нӿڷ�ʽ����(d��ng)��CS���Ӹ��λ�r(sh��)��ģ�K���������ղ��@ʾ��(sh��)��(j��)����tģ�K�@ʾ������ֹ��ͨ����r�£���(d��ng)ϵ�y(t��ng)�Hʹ��һ��(g��)Һ���@ʾģ�K�r(sh��)����CS�����B�ӹ̶��ĸ��ƽ�� ģ�K2�����й��������r(sh��)�����D��ʾ�� ��D3-10 2�����Еr(sh��)��D �ɈD3.12���Կ�������Ƭ�C(j��)�cҺ��ģ�K֮�g����1�ֹ�(ji��)�Ĕ�(sh��)��(j��)����24��(g��)�r(sh��)��}�_�����ȣ���Ƭ�C(j��)Ҫ�o����(sh��)��(j��)��ݔ��ʼλ���@������5��(g��)�B�m(x��)�ġ�1������(sh��)��(j��)��ʼλ����ģ�K���յ��B�m(x��)��5��(g��)��1�����t��(n��i)����ݔ�����ò��Ҵ��Ђ�ݔ����ͬ�����o��������RW��λ�����x��(sh��)��(j��)�Ă�ݔ�����x��?q��)�������RS��λ�����x���(n��i)����(sh��)��(j��)�Ĵ�����ָ��Ĵ��������ĵ�8λ�̶��顰0�����ڽ��յ���ʼλ����RW���͡�RW���ĵ�1��(g��)�ֹ�(ji��)����һ��(g��)�ֹ�(ji��)�Ĕ�(sh��)��(j��)��ָ����֞�2��(g��)�ֹ�(ji��)��(l��i)���Ђ��ͻ���ա���(sh��)��(j��)��ָ��ĸ�4λ�������ڵ�2��(g��)�ֹ�(ji��)���Д�(sh��)��(j��)�ĸ�4λ�����4λ�t�Þ顰0������(sh��)��(j��)��ָ��ĵ�4λ�����ڵ�3��(g��)�ֹ�(ji��)�ĸ�4λ�����4λҲ�Þ顰0����������һ��(g��)�ֹ�(ji��)ָ���(sh��)��(j��)�Ă��͡���Ҫע����ǣ���(d��ng)�ж���(g��)��(sh��)��(j��)��ָ��Ҫ���͕r(sh��)�����Ҫ�ȵ�һ��(g��)ָ����Ɉ�(zh��)���ꮅ���ق�����һ��(g��)ָ���(sh��)��(j��)����t����(hu��)���ָ���(sh��)��(j��)�āGʧ���@����?y��n)�Һ��ģ�K��(n��i)���](m��i)�аl(f��)��/���վ��_�^(q��)��
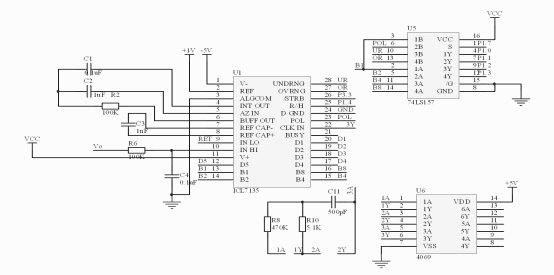
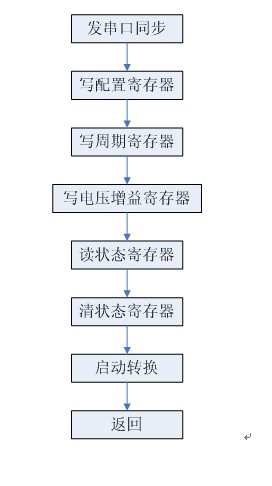
3.4��(b��o)���·���O(sh��)Ӌ(j��)�D��ϵ�y(t��ng)��(b��o)���·ԭ��D�����ڳ��d��Ƿ������ʾ��ϵ�y(t��ng)�O(sh��)Ӌ(j��)�˃ɂ�(g��)�l(f��)����O�����鳬�d��Ƿ����ָʾ����ʹϵ�y(t��ng)�������ơ���(d��ng)ϵ�y(t��ng)�Д��鳬�d��Ƿ���̕r(sh��)��ICL7135�oݔ��һ��(g��)���ƽ��̖(h��o)OR�����d����UR��Ƿ���̣�����(j��ng)���T(m��n)���γɵ��ƽ�Ķ��(q��)��(d��ng)�l(f��)����O�ܰl(f��)����ʾ�� 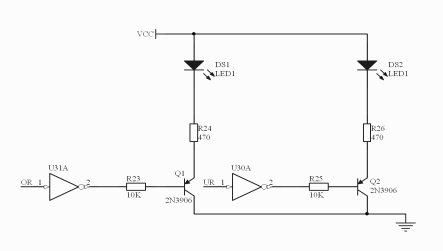 ��D3-11 ��(b��o)���·ԭ��D ��D3-11 ��(b��o)���·ԭ��D ������ ܛ���O(sh��)Ӌ(j��)ܛ�����̈D�������O(sh��)Ӌ(j��)���˷�������{(di��o)ԇ����߿ɿ��ԣ������O(sh��)Ӌ(j��)�������϶��¡�ģ�K�����Y(ji��)��(g��u)���ij����O(sh��)Ӌ(j��)�������ѿ��ľ����^(gu��)����(x��)�֣��ֽ��һ��(g��)��(g��)����ģ�K��ÿ��(g��)����ģ�K���(d��)����ÿ��(g��)ģ�K�������һ��(g��)���_���΄�(w��)����(sh��)�F(xi��n)ij��(g��)���w�Ĺ��ܡ����O(sh��)Ӌ(j��)���΄�(w��)ģ�K���ֵij�����Ҫ�г�ʼ������������ A/D�D(zhu��n)�Q�ӳ����@ʾ�ӳ����I�P(p��n)̎���ӳ��� 4.1��ʼ�������O(sh��)Ӌ(j��)���̈D��Ƭ�C(j��)ϵ�y(t��ng)��늺��M(j��n)���ʼ��������Ɇ�Ƭ�C(j��)Ƭ��(n��i)��ģ�K���O(sh��)�ú�A/D�D(zhu��n)�Q���Ĺ����O(sh��)�ó�ʼ����Ȼ���M(j��n)�������� ��D 4-1����ʼ�������O(sh��)Ӌ(j��)���̈D 4.2�������O(sh��)Ӌ(j��)���̈D��Ƭ�C(j��)��ɳ�ʼ��������M(j��n)����������������Ҫ��Ɍ�(du��)�惦(ch��)����(sh��)���xȡ����(du��)�z�y(c��)���Ĕ�(sh��)��(j��)�M(j��n)�Д�(sh��)��(j��)̎�����I̎�����@ʾ̎���ȡ� <img alt="" src="http://c.51hei.com/a/huq/a/a/8/50/50.034.jpg" _height="594" border="0" width="363">[/code]
��D4-2���������O(sh��)Ӌ(j��)���̈D 4.2���������O(sh��)Ӌ(j��)�������P(gu��n)�����O(sh��)Ӌ(j��)4.2.1�������
- uint max_weight;//���Q��
- uchar dsel;//�ֶ�ֵ
- uchar dp;//��(sh��)�c(di��n)
-
- float beilv;//����
- ulong zero_save;//��������λֵ
- }bdf;
-
- uint code num_ten[4]={1,10,100,1000};
- uchar code adcount2[4]={2,4,5};//��(sh��)��(j��)̎���M(j��n)ƽ���Δ�(sh��)
-
- uchar code tab_dsel[4]={1,2,5,10};//�ֶ�ֵ��
- //0 , 1 , 2 , 3 , 4 , 5 , 6 , 7 , 8 , 9
- uchar code tab[]={0xB7,0x03,0xD6,0xC7,0x63,0xE5,0xF5,0x83,0xF7,0xE7,
-
- //A , b , C , d , E , F , ��, - , t , P
- 0xF3,0x75,0xB4,0x57,0xF4,0xF0,0x00,0x40,0x74,0xF2,
-
- //H , L , o , J , r , n , U, =, - i
- 0x73,0x34,0x55,0x07,0x50,0x51,0x37,0x44,0x04,0x01};
- //�@ʾλ�a��
-
- //0, 1, 2, 3, 4, 5, 6
- uchar code digit[]={0xfe,0xdf,0xef,0xfd,0xfb,0xbf,0xF7};//�@ʾλ�a��
-
- sbit P_OE =P2^1;//�@ʾ����
- sbit P_LE =P2^0;
-
- sbit buz0 =P3^6;//���Q��
- sbit buz1 =P3^7;
- /******************************************************/
- bit b_follow;//����(d��ng)��λ��ۙ��(bi��o)ӛ
- bit b_serial;//���ڰl(f��)�����(bi��o)ӛ
- bit b_followdelay;//��һ�β��M(j��n)����λ��ۙ
- bit b_steady;//��(w��n)����(bi��o)ӛ
- /******************************************************/
- void (* data task)(void);//����(sh��)ָ�׃����������һ��Ҫ�����΄�(w��)
-
- uint idata fendushu;//�ֶȔ�(sh��)
-
- uchar weight_led[6] ;//�������@ʾ����
- uchar idata temp_var;
- uchar weight_dp;//С��(sh��)�c(di��n)λ��(sh��)
- uchar fu_number;//ؓ(f��)̖(h��o)�@ʾλ��
- uchar wdcount;//��(w��n)��Ӌ(j��)��(sh��)
- uchar adup_count;//����ֵӋ(j��)��(sh��)
- uchar addcount3;//�ۼӴΔ�(sh��)
- /******************************************************/
- extern void key_scan(void);//���I����
- extern void weight_disp(void);//����Ӌ(j��)�㣬���d��(b��o)��
- extern void start_set(void);//��Ƭ�C(j��)��ʼ���O(sh��)��
- extern void adc (void);//�xȡADֵ
- extern void ad_processor(void);//AD��(sh��)��(j��)�V��̎��
- extern void fun_weight(void);//�����Q�ؠ�B(t��i)
- extern void bd_start(void);//������늉���(bi��o)���x��
- extern void dy_disp(void);//늉��@ʾ
- extern void led_disp(ulong temp,uchar num);
- extern uchar get_jiaoyan(uchar *address,uchar num);//Ӌ(j��)��У�(y��n)��
- extern void neima(void);
-
- void delay60ms(uchar time);//40ms�ӕr(sh��)
- void fendu_val(void);//�ֶȔ�(sh��)�\(y��n)��
- void check_canshu(void);//�x����(sh��)����У�(y��n)�Ƿ����_
- void ver_disp(void);//�@ʾ�汾̖(h��o)
- void seg_check(void);//�P��(hu��)�z�y(c��)
- /******************************************/
- void main (void)
- {
-
- start_set(); //��Ƭ�C(j��)��ʼ��
- beep_time=3; //�_(k��i)�C(j��)�Q��
- flash_num=6; //�](m��i)���W�qλ
- spi_sys(); //adоƬ��ʼ��
- check_canshu(); //�x����(sh��)����У�(y��n)�Ƿ����_
- if(bdf.shuduval>2) //���Ǯ���ֵ����Ĭ�J(r��n)ֵ
- bdf.shuduval=1;
- addcount3=4;
- bdf_dp_temp=bdf.dp; //����С��(sh��)�c(di��n)����(bi��o)���ą���(sh��)�r(sh��)�ã�
- bdf_dsel_temp=bdf.dsel;//����ֶ�ֵ����(bi��o)���ą���(sh��)�r(sh��)�ã�
- key_scan(); //��(bi��o)�����I����
-
- switch(key_temp) //�����I̎������(sh��)
- {
- case 0xc0:b_biaoding=1;task=bd_start ; break;//
-
- default:
- bdf.dp=0;
- ver_disp();//�@ʾ�汾̖(h��o)
- seg_check();//�P��(hu��)�z�y(c��)
- fendu_val();//�ֶȔ�(sh��)�\(y��n)��
- zero_current=ad_steady;//���殔(d��ng)ǰ��λֵ
- task=fun_weight;
- break;
- }
-
- do
- { //��ѭ�h(hu��n)����
- adc(); //A/D�ɘ�
- ad_processor();//��(sh��)��(j��)̎��
- zero_follow(); //��λ��ۙ����
- neima(); //��(n��i)�aӋ(j��)��
- weight_disp(); //�����@ʾ
- key_scan(); //���I����
- (* task)(); //�΄�(w��)�ГQ����(sh��)
-
- }
- while(1);
-
-
-
- }
- /*****************************************************************/
- void fendu_val(void)//�ֶȔ�(sh��)�\(y��n)��
-
- { uchar i;
- ulong temp;
-
- temp=(ulong)bdf.max_weight*num_ten[bdf_dp_temp];
- fendushu=temp/bdf.dsel;
-
- i=fendushu/3000;
- if (i==0)
- i=1;
- half_sel_bound=5/bdf.beilv;//�낀(g��)�ֶȵ�ԭʼ�a
- follow_bound=i*half_sel_bound;//Ӌ(j��)����λ��ۙ�r(sh��)��ԭʼ�a����3000�ֶ�
- time_weight=200;
-
- }
- /*****************************************************************/
- void ver_disp(void)//�@ʾ�汾̖(h��o)���������
- {
- weight_led[0]=7;// 7
- weight_led[1]=1;// 1
- weight_led[2]=2;// 2
- weight_led[3]=17;// -
- weight_led[4]=0;// 0
- weight_led[5]=5;// 5
- fun_led=0xff;
- delay60ms(15);//40ms�ӕr(sh��)
- beep_time=3;
- led_disp(bdf.max_weight,5);//�@ʾ�������
- weight_led[0]=15;// F
- delay60ms(20);//40ms�ӕr(sh��)
4.2��̖(h��o)�ɘ��cA/D�D(zhu��n)�Q�ӳ�����O(sh��)Ӌ(j��)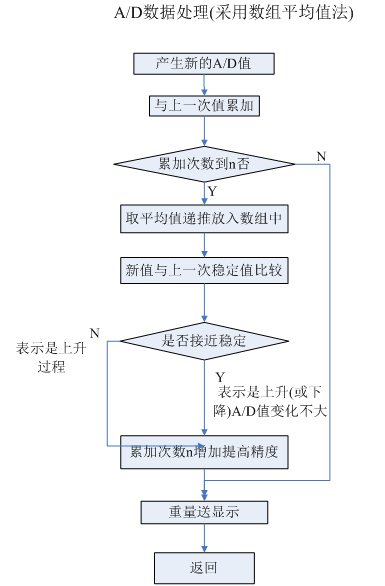
��D��4-3����̖(h��o)�ɘ��cA/D�D(zhu��n)�Q�ӳ�����O(sh��)Ӌ(j��)
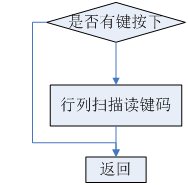
4.3 �I�P(p��n)/�@ʾ�ӳ����O(sh��)Ӌ(j��) ��D 4-4���I�P(p��n)/�@ʾ�ӳ����O(sh��)Ӌ(j��) ��D 4-5�����I�������̈D - extern bit b_keyok;//�а��I�a(ch��n)����(bi��o)ӛ
- extern bit b_longdown;//�L(zh��ng)����(bi��o)ӛ
- extern uchar key_num;//�Iֵ
- extern uchar key_temp;//�R�r(sh��)�Iֵ
- extern uchar key_count;//�I�L(zh��ng)��Ӌ(j��)��(sh��)
- extern uchar key_dly;//�Iȥ����(d��ng)�ӕr(sh��)
- extern uchar beep_time;//���Q�r(sh��)�g
- void key_scan1();////���I���_(k��i)��](m��i)�а���̎��
- /****************************************************/
- oid disp_t1(void) interrupt 3 using 1//�@ʾ�Д����
- {
- uchar temp;
- TR1 =0;
- P_OE=1;//����B(t��i)����ֹݔ��
- if((disp_number==(5-bdf.dp))&(bdf.dp!=0))//�@һλ�Ƿ���С��(sh��)�c(di��n)
- temp=0x08;//С��(sh��)�c(di��n)�δa
- else
- temp=0;
- if(disp_number==6)//ָʾ���@ʾ���ò��
- P0=fun_led;//
- else
- {
- if((disp_number==fu_number)&&b_fuhao)
- temp=temp|0x40;
-
- if((disp_number==flash_num)&b_flash)//�Ƿ����W�qλ
- P0=0x0;
- else
- P0=tab[weight_led[disp_number]]|temp;//���ȡ�δa
- }
- P_LE=1;
- P_LE=0;//573�i��δa
- P0=digit[disp_number];//��λ�a
- P_OE=0;//573ݔ����Ч
- disp_number++;
- if(disp_number==7)//�Ƿ��@ʾ���һλ
- {
- disp_number=0;
- if(beep_time)//�Ƿ�Ҫ�Q��
- {
- if(!TR0)
- {buz0=~buz1;TR0 =1;}
- beep_time--;
- }
- else
- {TR0=0;buz0=1;buz1=1;}//���Q�Еr(sh��)�øߣ��pС���
- if(key_dly)//���Iȥ����(d��ng)�ӕr(sh��)
- key_dly--;
- if(flash_num<6)
- {
- if(flash_time)//�W�qӋ(j��)�r(sh��)
- flash_time--;
- else
- { b_flash=!b_flash;flash_time=20;}//�r(sh��)�g�������W�q��(bi��o)ӛ
- }
- }
- TH1 =0xf8;
- TL1 =0x18;
- TR1 =1 ;
- }
������Word��ʽ�ęn51�����d��ַ��
 ����51��Ƭ�C(j��)����ӳӵ��O(sh��)Ӌ(j��).doc
(1.22 MB, ���d��(sh��): 223)
����51��Ƭ�C(j��)����ӳӵ��O(sh��)Ӌ(j��).doc
(1.22 MB, ���d��(sh��): 223)
2018-5-10 22:04 �ς�
�c(di��n)���ļ������d����
| 
 [��(f��)��朽�]
[��(f��)��朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664