��ϵ�y�OӋ2
1.1�OӋ�΄� 2
1.2�������� 2
1.3�Uչ���� 2
2ϵ�y����Փ�C2
2.1����ģ�K 2
2.2�@ʾģ�K 3
3 DS18B20����Փ�����cӋ��3
4�·�c�����OӋ6
4.1ϵ�y���w��D 6
4.2���w�· 6
4.3������OӋ
���Y
���1
���2
��ϵ�y�OӋ
1.1�OӋ�΄��OӋһ���֜ضȜy��ϵ�y�����Ԅӌ��F���H�ضȵĜy���c�@ʾ��
1.2����������1���y�ط���-30�桫+120�档
��2���y���`���ڡ�0.5��֮�ȡ�
��3���������@ʾ�y���Ĝضȡ�
��4���������@ʾ�y���Ĝضȵ�׃�Q�����D��
1.3�Uչ������1�����Ӝؿع��ܣ��������O�Üؿص������ޡ�
��2�����Ӝؿ؈��ܡ�
2ϵ�y����Փ�C ��ϵ�y��Ҫ������ģ�K���@ʾģ�K�����Iģ�K�����Q��ģ�K��LEDģ�K��������ģ�K�M�ɣ�����քeՓ�C�@�ׂ�ģ�K���x��
2.1����ģ�K������AT89C52��Ƭ�C��һ�N������8λ��Ƭ��Ӌ��C���Ⱥ˱��������S����ָ�����F������Ʒ��ȫ���������ܺͲ�����չ���ܣ����Atmega16�҂���AT89C52������Ϥ����оƬ�r���^�ͣ��ԃr�ȸߡ�
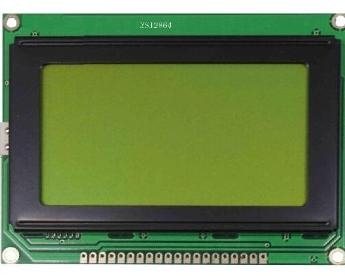
2.2�@ʾģ�K����������LCD12864�@ʾ��LCD12864��Ļ�@ʾ��āֱ�^���ҿ����@ʾ���ģ������������F��
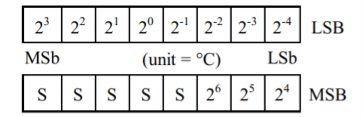
3 DS18B20����Փ�����cӋ��DS18B20 ͨ�^���̣����Ԍ��F��� 12 λ�Ĝضȴ惦ֵ���ڼĴ����У����a�a�ĸ�ʽ�惦����D1��ʾ��
�D1 DS18B20 �ضȔ�����ʽ
�Ĵ���һ�� 2 ���ֹ���LSB �ǵ��ֹ���MSB �Ǹ��ֹ������� MSb ���ֹ��ĸ�λ��LSb ���ֹ��ĵ�λ����ҿ��Կ����������M�Ɣ��֣�ÿһλ�����Ĝضȵĺ��x������ʾ�����ˡ����� S��ʾ���Ƿ�̖λ���� 11 λ���� 2 �ă磬�Á���ʾ��K�Ĝضȡ�DS18B20 �ĜضȜy�������Ǐ�-55 �ȵ�+125 �ȣ����ضȔ����ı��F��ʽ������ؓ�ضȣ��Ĵ�����ÿ��������ͬ���ߵĿ̶�һ�ӷֲ�����D 2��ʾ��
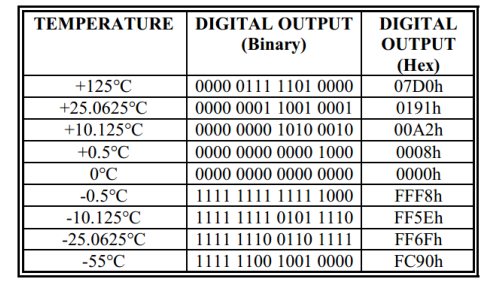
�D2 DS18B20 �ض�ֵ
���M�Ɣ������λ׃�� 1������ض�׃�� 0.0625 �ȵ�ӳ���Pϵ���� 0 �ȵĕr���Ǿ���0x0000�����ض� 125 �ȵĕr����ʮ���M���� 0x07D0�����ض������� 55 �ȵĕr�����Ĕ����� 0xFC90�����^���f���������� 0x0001 �ĕr���ǜضȾ��� 0.0625 ���ˡ�
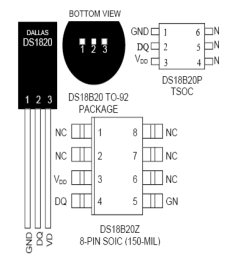
DS18B20 ���ν�B:
DALLAS ���ξ����֜ضȂ�����DS18B20��һ�N���͵ġ�һ�������������w�e��С�����m���ڶ�N���ϡ����m��늉���������������DALLAS �댧�w��˾�Ĕ��ֻ��ضȂ�����DS18B20�������ϵ�һƬ֧�֡�һ���������ӿڵĜضȂ��������ضȜy��������-55��+125 �z�϶ȣ��ɾ��̞�9λ��12 λ�D�Q���ȣ��y�طֱ��ʿ��_0.0625�z�϶ȣ��ֱ����O�������Լ��Ñ��O���Ĉضȴ惦��EEPROM �У���늺���Ȼ���档���y�ض��÷�̖�Uչ��16λ��������ʽ����ݔ�����乤���Դ�ȿ������h�����룬Ҳ���Բ��ü����Դ��ʽ�a��������DS18B20���Բ���3 ����2 �����ϣ�CPUֻ��һ���˿ھ������c�T��DS18B20 ͨ�ţ�ռ��̎�����Ķ˿��^�٣��ɹ�ʡ������������߉�·������������M��һ���y��ϵ�y�����о�·���Σ���һ��ͨ�ž������Ԓ�ܶ��@�ӵĔ��֜ض�Ӌ��ʮ�ַ��㡣
DS18B20 ���������c���£�
���صĆξ��ӿڷ�ʽ��DS18B20���c̎�����B�ӕr�H��Ҫһ�l�ھ����Ɍ��F̎�����cDS18B20���p��ͨӍ
��DS18B20֧�ֶ��c�M�W���ܣ�����DS18B20���Բ���Ψһ�������ϣ����F�M�W���c�y��
��DS18B20��ʹ���в���Ҫ�κ����Ԫ����ȫ������Ԫ�����D�Q�·����������һֻ���O�ܵļ����·��
���m��늉�����������늉�������3.0��5.5V���ڼ����Դ��ʽ�¿��ɔ��������
��y�ط�����55�桫��125�棬���Ȟ��0.5��
������C����
��y���Y��ֱ��ݔ��������̖���ԡ�һ�����������Ђ��ͽoCPU��ͬ�r�ɂ���CRCУ�λ�����ИO���Ŀ��ɔ_�m�e����
��ؓ늉����ԣ��Դ�O�Խӷ��r���ض�Ӌ������l�����������������������
�������cʹDS18B20�dz��m���c���c���h���x�ضșz�yϵ�y��
DS18B20�Ȳ��Y����Ҫ���IJ��ֽM�ɣ�64λ���ROM���ضȂ��������Ǔ]�l�ĜضȈ��|�l��TH��TL�����üĴ�����DS18B20�Ĺ��_���С����N���b��ʽ��D 4.2 ��ʾ��DQ �锵��ݔ��/ݔ�����_���_©�ο����ӿ����_�����������ڼ����Դ�£�Ҳ�����������ṩ�Դ��GND�����̖��VDD����x���VDD���_���������ڼ����Դ�r�������_��횽ӵء�
�ⲿ���b��ʽ �������·�D
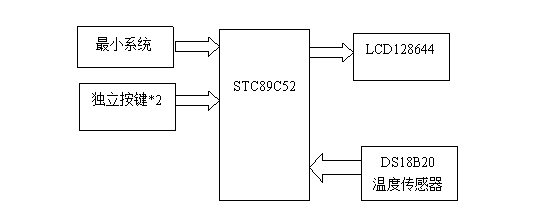
4�·�c�����OӋ4.1ϵ�y���w��Dϵ�y���w��D��D3��ʾ
�D3 ϵ�y���w��D
4.2���w�·���w�·�DҊ���2��
4.3������OӋ4.3.1������������1���܉�yԇ-30�桫+120��Ĝضȡ�
��2������S1�����ӜضȈ����ޣ�����S2�ܜp�ٜضȈ����ޡ�
4.3.2ԇ����������Ҋ���1��
���Y��ϵ�y�Ԇ�Ƭ�CSTC89C52оƬ����IJ���������LCD12864���������I��DS18B20�����C�Z���㷨���F�˺��ה��֜ض�Ӌ�OӋ����ɴ˴��OӋ�}Ŀ�е�ȫ���������ܺͲ�����չ���ܡ���ϵ�y�OӋ�^���У�����Ӳ����·���Σ���ְl�]ܛ�����̷����`������c����M��ϵ�y�OӋҪ��
�ڱ����OӋ���^���У��������S��ͻ�l�¼������y���OӋ������һ��ֹ����ǰ����ͨ�^�м��������{�����Q��һ����һ���Ć��}���������^�����҂���̵��w�����F������Ҫ�ԣ���������Լ���Q���}�����������n���OӋ�������^���У����������S�����벻�������y�����Լ��OӋ�·���M��ܛ�����g�ȵȡ����H��ˣ��ܶ���δ��Ҋ�^�Ć��}�ͬF�����_���ң��������{ԇ���^���У��r�����F���}����ÿ�ν��^�м����Ͳ��ң��K�ڿ��Ԍ��@Щ���}ᘌ��Ե��ҵ����M�к����ĸ������_�����������F�����Ĺ��ܣ����Լ�̎���y�}���^���У������W���˺ܶ��µ�֪�R��


 ����TQQ:125739409;���g����QQȺ281945664
����TQQ:125739409;���g����QQȺ281945664