|
ժҪ�����Ľ�B��һ���Ԇ�Ƭ�C(j��)AT89S51���������LED�c(di��n)��@ʾ��ϵ�y(t��ng)���O(sh��)Ӌ(j��)��ԓϵ�y(t��ng)�Ɍ�(sh��)�F(xi��n)��Ӣ���ַ����@ʾ�̈́�(d��ng)�B(t��i)��Ч�@ʾ�����ҿ���ͨ�^(gu��)��(j��)�B�ķ�ʽ��(l��i)�U(ku��)���@ʾ��Ļ�ijߴ����_(d��)�������@ʾ��(n��i)�ݵ�Ŀ�ġ�ϵ�y(t��ng)����PC�C(j��)������λ�C(j��)����λ�C(j��)���Ƭ�C(j��)�l(f��)�Ϳ����������λ�C(j��)���惦(ch��)���@ʾ���a��AT89S51��Ƭ�C(j��)���ղ�̎��PC�C(j��)�Ŀ��������Լ��@ʾ���a�����@ʾ�(q��)��(d��ng)ģ�K�(q��)��(d��ng)һ��(g��)16��16�ֱ��ʵ�LED�c(di��n)��@ʾ���Ē����@ʾ��PC�C(j��)�c��Ƭ�C(j��)֮�g��ͨ�Ų���RS��232Cͨ�Ř�(bi��o)��(zh��n)��(l��i)��(sh��)�F(xi��n)�����x�õ�AT89S51��Ƭ�C(j��)���Ѓr(ji��)���������?q��)��뷽������c(di��n)ʹ������(g��)ϵ�y(t��ng)����S�o(h��)�͙z�ޡ�����֮�⣬ԓϵ�y(t��ng)ֻռ���ˆ�Ƭ�C(j��)������I /O�ں̓�(n��i)�棬��ϵ�y(t��ng)�����˹��ܔU(ku��)չ�Ŀ��g��
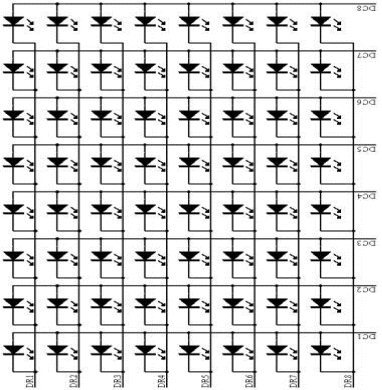
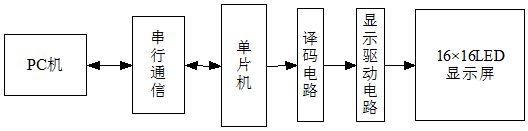
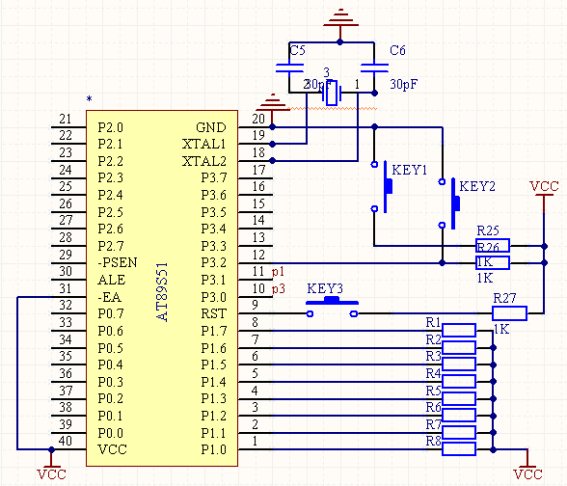
��(du��)�O(sh��)Ӌ(j��)�}Ŀ�����c(di��n)�����ߌ�(du��)Փ�ĵă�(n��i)�ݺͽY(ji��)��(g��u)�������°��ţ� ��1������������Փ�C���x�� �Ѽ��}Ŀ�����P(gu��n)�Y�ϣ�������Ŀǰͨ�õ��O(sh��)Ӌ(j��)˼����O(sh��)Ӌ(j��)�����M�������O(sh��)Ӌ(j��)�����M(j��n)�з������^����K�x������PC�C(j��)����λ�C(j��)����Ƭ�C(j��)����Ŀ�������������g�a�·���(q��)��(d��ng)�·���O(sh��)Ӌ(j��)������ ��2��������(sh��)�F(xi��n) ���O(sh��)Ӌ(j��)������ָ��(d��o)˼���x����m��������(l��i)��(sh��)�F(xi��n)�@һ˼�룬�x�������r(sh��)Ҫ�Ĺ��ܺ�늚����ԃɷ����(l��i)�x���Փ�C����(j��ng)�^(gu��)��(du��)���x���x��AT89S51��Ƭ�C(j��)����Ŀ����������ɴ����D(zhu��n)�Q��74LS164���i����74LS373���g�a�·���������O��8550��ULN2803���(q��)��(d��ng)�·������Փ���г���Ԕ��(x��)����������(sh��)����ϵ�y(t��ng)�е��B��ʹ�÷����� ��3��ܛ������ ����(j��)Ӳ�����c(di��n)���O(sh��)Ӌ(j��)Ҫ��ܛ���x��C�Z(y��)�Ծ����������ܷ֞��o�B(t��i)�@ʾ����(d��ng)�B(t��i)�@ʾ��ͨ�ŵȎׂ�(g��)����������(du��)��(d��)����ģ�K��Ȼ���������ֵ�ģ�K����(g��)�������{(di��o)ԇ�����(d��)����ģ�K��������(l��i)�� ��4���(y��n)�C�c�y(c��)ԇ �{(di��o)ԇ�֞�Ӳ���{(di��o)ԇ��ܛ���{(di��o)ԇ��ϵ�y(t��ng)(li��n)���{(di��o)ԇ�ײ���(l��i)�M(j��n)�С���Ӳ���{(di��o)ԇ�аl(f��)�F(xi��n)�І�Ƭ�C(j��)�˿��(q��)��(d��ng)�������㡢�(q��)��(d��ng)�·��������(w��n)���Ȇ�(w��n)�}����ܛ���{(di��o)ԇ�г��F(xi��n)�������Ϲ������f(xi��)�{(di��o)�Ȇ�(w��n)�}��ͨ�^(gu��)�����������ҳ��ˆ�(w��n)�}ԭ���O(sh��)�������Q�� ��5���Y(ji��)Փ �O(sh��)Ӌ(j��)��ɺ�(du��)�O(sh��)Ӌ(j��)���������Ć�(w��n)�}����(j��ng)�(y��n)��Ӗ(x��n)���Լ��Լ����뷨�M(j��n)�п��Y(ji��)�� ��2�� ����Փ�C�c�x��2.1 ϵ�y(t��ng)Ӳ�����������(sh��)��LED�@ʾ�����ڑ��⣬���Ԍ�(du��)Ӳ�����|(zh��)��Ҫ��dz��ĸߡ��鷽��z�;S�o(h��)Ӳ���·�O(sh��)Ӌ(j��)�r(sh��)��������ģ�K�����O(sh��)Ӌ(j��)������Ӳ�����O(sh��)Ӌ(j��)����ģ�K���O(sh��)Ӌ(j��)����Ҫ�M��ģ�K����������Ҫ�܉������(g��)ϵ�y(t��ng)���ݡ���D2-1��ʾ,����(j��)�@ʾϵ�y(t��ng)�Ĺ������c(di��n)�_��ϵ�y(t��ng)Ӳ�����@ʾ�����֣����Ʋ��֣�ͨ��ϵ�y(t��ng)����λ�C(j��)�IJ��ֽM�ɡ���λ�C(j��)ͨ�^(gu��)ͨ�Ų�������Ʋ��ְl(f��)�Ϳ���ָ����@ʾ��(n��i)�ݴ��a�����Ʋ��ֈ�(zh��)���@ʾָ����@ʾ���a̎��������@ʾ���ֵ��@ʾ��(n��i)�ݺ��@ʾ��ʽ[3]�� �D2-1 ϵ�y(t��ng)Ӳ���M�ɿ�D 2.1.1 �@ʾ�������������Ʋ���������(g��)ϵ�y(t��ng)�ĺ��IJ��֣��书�ܞ��c��λ�C(j��)ͨ�Ž�����λ�C(j��)�l(f��)�͵Ĕ�(sh��)��(j��)�Ϳ���ָ��̎���^(gu��)������@ʾ�����@ʾ��(n��i)�ݡ��䳣�õ�����O(sh��)Ӌ(j��)�����І�Ƭ�C(j��)��DSP����EDA���g(sh��)���N�O(sh��)Ӌ(j��)�������^���������c(di��n)�� ��1����Ƭ�C(j��) ��Ƭ�C(j��)�Ǽ�����CPU��ROM��RAM��I/ O�ڵ���Ӌ(j��)��C(j��)�����к�(qi��ng)�Ľӿ����ܣ��dz��m���ڹ��I(y��)����,����ֽ�������(MCU)����Ƭ�C(j��)Ʒ�N�Rȫ,��̖(h��o)���� CPU ��8��16��32��64λ�������RISC ���g(sh��)��Ƭ��I/O�dz��S�����еĆ�Ƭ�C(j��)������A/ D���� ���T������PWM���@ʾ�(q��)��(d��ng)������(sh��)�l(f��)�������I�P���Ƶȡ������ăr(ji��)��Ҳ�ߵͲ��ȣ��@�ӘO��؝M�����_(k��i)�l(f��)�ߵ��x�����ɡ�����֮���Ƭ�C(j��)߀���е�늉��͵��ĵ����c(di��n)���S������Ҏ(gu��)ģ�����·�İl(f��)չ��NMOS��ˇ��Ƭ�C(j��)��CMOS���棬���_(k��i)ʼ��HMOS �^(gu��)�ɡ����늉���5V ����3V��2V������1V�����������mA������A ���@�ڱ�yʽ�a(ch��n)Ʒ�д�������֮��[4]�� ��2��DSP оƬ DSP �ֽД�(sh��)����̖(h��o)̎���������˼�x��DSP��Ҫ���ڔ�(sh��)����̖(h��o)̎���I(l��ng)�dz��m�ϸ��ܶȣ��؏�(f��)�\(y��n)�㼰��(sh��)��(j��)��������̖(h��o)̎�����F(xi��n)���ѽ�(j��ng)�V����(y��ng)����ͨ�š���yʽӋ(j��)��C(j��)�ͱ�yʽ�x�������_(d��)���D���ա�����������t(y��)���O(sh��)����I(l��ng)��DSP���������Ĺ���Y(ji��)��(g��u)���࿂�����g(sh��)�Լ���ˮ���Y(ji��)��(g��u)���������c��(sh��)��(j��)�惦(ch��)�����_(k��i)��ʹ�ö࿂����ȡָ���ȡ��(sh��)��(j��)ͬ�r(sh��)�M(j��n)�У��Լ���ˮ�����g(sh��)���@ʹ���ٶ������^�����ߡ�DSP�^(q��)�e��һ��̎��������һ��Ҫ��(bi��o)־��Ӳ���˷����Լ�����ָ�һ��̎������ܛ����(sh��)�F(xi��n)�˷�,��l��(zh��)��ָ��ٶ�������DSP ����Ӳ���˷�����������ɳ˷��\(y��n)�㣬����߀���Ќ��T����̖(h��o)̎��ָ���TM320 ϵ�е�FIRS ��LMS��MACDָ���[5]�� ��3��EDA EDA(��Electronic Design Automation) ������O(sh��)Ӌ(j��)�Ԅ�(d��ng)����������Ӌ(j��)��C(j��)�鹤�ߣ���EDA ܛ��ƽ�_(t��i)�ϣ���(du��)��Ӳ�������Z(y��)��HDL ��ɵ��O(sh��)Ӌ(j��)�ļ��Ԅ�(d��ng)��߉���g��߉����(ji��n)��߉�ָ߉�C�ϼ���(y��u)����߉���ֲ�����߉���棬ֱ����(du��)���ض�Ŀ��(bi��o)оƬ�M(j��n)���m�侎�g��߉Ӱ��;������d�ȡ��O(sh��)Ӌ(j��)��ֻ����HDL �Z(y��)�����ϵ�y(t��ng)���ܵ�����������EDA���߾Ϳɵõ��O(sh��)Ӌ(j��)�Y(ji��)��,�����g��Ĵ��a���d��Ŀ��(bi��o)оƬ�Ϳ���Ӳ���ό�(sh��)�F(xi��n)������FPGA/CPLD����ͨ�^(gu��)ܛ�����̌�(du��)ԓӲ���ĽY(ji��)��(g��u)������ʽ�M(j��n)���ؘ�(g��u)����ܛ��������ஔ(d��ng)�ڸ�׃��Ӳ����ܛ���������Բ���������µ��O(sh��)Ӌ(j��)���������ҿ��Զ���(g��)�˷ֹ����й����@�ӱ�s�����_(k��i)�l(f��)���ں����Еr(sh��)�g���������ڼ��ҵ��Ј�(ch��ng)��(j��ng)��(zh��ng)�Г�ռ�șC(j��)������MCU��DSP����ͨ�^(gu��)���Ј�(zh��)��ָ���(l��i)��(sh��)�F(xi��n)�ض����ܣ����ɱ�����٣���FPGA/CPLD�t�Ɍ�(sh��)�F(xi��n)Ӳ���ϵIJ��й������ڌ�(sh��)�r(sh��)�y(c��)�غ��ّ�(y��ng)���I(l��ng)��ǰ���V韣���һ���棬F(xi��n)PGA/CPLP�����ڹ����_(k��i)�l(f��)����ܛ����(sh��)�F(xi��n)�ģ�������C(j��)�ƅs�ͼ�Ӳ���·һ�ӣ�ʮ�ֿɿ��� ���N�O(sh��)Ӌ(j��)��ʽ����^���Ѓ�(y��u)�c(di��n)�Ҷ��܉�?q��)��F(xi��n)���ƹ��ܣ�����Ƭ�C(j��)�ļ��g(sh��)�T���^���_(k��i)�l(f��)�ɱ�Ҳ�^�ͷdz��m�ϳ��W(xu��)���M(j��n)�ЌW(xu��)��(x��)��呟�ʹ�á��F(xi��n)���Ј�(ch��ng)�ϳ��õĆ�Ƭ�C(j��)��Ҫ��MCS-51��AVR��ARM��PIC�ȡ����Б�(y��ng)����V���Ć�Ƭ�C(j��)����Intel��51ϵ�У����ڮa(ch��n)ƷӲ���Y(ji��)��(g��u)������ָ��ϵ�y(t��ng)Ҏ(gu��)������֮���a(ch��n)�vʷ���ƾá�������������ă�(y��u)��(sh��)�������Ƭ�C(j��)�W(xu��)��(x��)�Ľ̲ġ���51ϵ�е�I/O�_���O(sh��)�ú�ʹ�÷dz���(ji��n)�Σ���(d��ng)ԓ�_��ݔ���_ʹ�Õr(sh��)��ֻ회�ԓ�_�O(sh��)�Þ���ƽ����(f��)λ�r(sh��)����I/O�ھ��ø��ƽ������(d��ng)ԓ�_��ݔ���_ʹ�Õr(sh��)���t����ƽ����ƽ���ɡ������ڿ��Ʋ��ַ������x�����x��51ϵ�І�Ƭ�C(j��)������Ʋ��ֵĺ��������� 2.1.2 ͨ��ϵ�y(t��ng)ͨ�Ų���Ҫ�M����O(sh��)Ӌ(j��)Ҫ����Ƿ�(w��n)�������١���(ji��n)����(sh��)�F(xi��n)����?y��n)�ͨ����r���@ʾ������λ�C(j��)�ľ��x����(hu��)���h(yu��n)������ͨ�ž��x��Ҫ���Ǻܸߡ�Ӌ(j��)��C(j��)��(sh��)��(j��)ͨ����Ҫ���ò���ͨ�źʹ���ͨ�ŃɷN��ʽ�� ��1������ͨ�� ����ͨ�ŕr(sh��)��(sh��)��(j��)�ĸ���(g��)λͬ�r(sh��)���ͣ������ֻ��ֹ�(ji��)���λ�����M(j��n)�С�����ͨ���ٶȿ죬���õ�ͨ�ž��ࡢ�ɱ��ߣ��ʲ����M(j��n)���h(yu��n)���xͨ�š� ��2������ͨ�� ����ͨ�Ŕ�(sh��)��(j��)��һλһλ�����ͣ�ֻ�ú��َ�ͨ�ž������Ђ��͵��ٶȵͣ������͵ľ��x�L(zh��ng)����˴����m�����L(zh��ng)���x���ٶ�Ҫ�ߵĈ�(ch��ng)�ϡ��ڴ��аl(f��)�͕r(sh��)����(sh��)��(j��)��һλһλ������M(j��n)�еģ���Ӌ(j��)��C(j��)��(n��i)���Ĕ�(sh��)��(j��)�Dz��еġ���ˣ���(d��ng)Ӌ(j��)��C(j��)����l(f��)�͔�(sh��)��(j��)�r(sh��)����회����Д�(sh��)��(j��)�D(zhu��n)�Q�鴮�Д�(sh��)��(j��)�ٰl(f��)�͡���֮���ֱ�회����Д�(sh��)��(j��)�D(zhu��n)�Q�鲢�Д�(sh��)��(j��)ݔ��Ӌ(j��)��C(j��)�С��@�N�D(zhu��n)�Q��������Ӳ����(sh��)�F(xi��n)Ҳ������ܛ����(sh��)�F(xi��n)������ܛ����(sh��)�F(xi��n)��(hu��)����CPUؓ(f��)��(d��n)�������������ʣ���Ŀǰ������Ӳ����(sh��)�F(xi��n)��ͨ�õ�ͨ�î�������/�l(f��)��������(ji��n)�QUART��Universal AsynchromousReceeiver/Trabsnitter��������@һ���ܵ�Ӳ���·���چ�Ƭ�C(j��)оƬ�У�UART�ѽ�(j��ng)���������У�������M�ɲ��֣���(g��u)��һ��(g��)���п�[6]�� �C���������}Ŀ�O(sh��)Ӌ(j��)�ѽ�(j��ng)�x���ˆ�Ƭ�C(j��)���_(k��i)�l(f��)��ʽ����Ƭ�C(j��)��UART�ѽ�(j��ng)�����چ�Ƭ�C(j��)��(n��i)������ͨ��ϵ�y(t��ng)�x����ͨ�Ş�ͨ�ŷ�ʽ�� 2.1.3 LED�c(di��n)��@ʾ���@ʾ���ְ�����һ�K���ٿ����@ʾһ��(g��)�h�ֵ��@ʾ�����Լ��(q��)��(d��ng)ԓ�@ʾ�����(q��)��(d��ng)�·�����چ�Ƭ�C(j��)��I/O������Ҫ����ֱ����I/O�ځ�(l��i)�(q��)��(d��ng)LED�@ʾ����������Ҫ��(du��)��Ƭ�C(j��)IO���M(j��n)�ДU(ku��)չ���ӆ�Ƭ�C(j��)����ݔ���������� LED�@ʾ������һ��(g��)һ��(g��)�İl(f��)����O���c(di��n)ꇘ�(g��u)�ɵģ�Ҫ��(g��u)�ɴ���Ļ��LED�@ʾ������Ҫ����(g��)�l(f��)����O�ܡ���(g��u)��LED��Ļ�ķ����ЃɷN��һ���Ɇ�(g��)�İl(f��)����O�����c(di��n)�B������(l��i)����D2-2��ʾ�������x��һЩ�Ɇ�(g��)�l(f��)����O�ܘ�(g��u)�ɵ�LED�c(di��n)���ģ�K��(g��u)�ɴ��LED�c(di��n)�ģ�K��Ŀǰ�Ј�(ch��ng)���ձ���õ��c(di��n)�ģ�K��8��8��16��16�N���@�ɷN��Ļ��(g��u)�ɷ���������ȱ�c(di��n)����(g��)�l(f��)����O�ܘ�(g��u)���@ʾ����(y��u)�c(di��n)���ڮ�(d��ng)��(g��)�İl(f��)����O�ܳ��F(xi��n)��(w��n)�}�r(sh��)ֻ����Qһ��(g��)���O�ܼ��ɣ��z�ijɱ��^�ͣ�ȱ�c(di��n)�����B�Ӿ�·��(f��)�s�����c(di��n)�ģ�K��(g��u)�ɵķ����s�����c֮�෴��ģ�K��(g��u)��ʡ�s�˴������B�������^(gu��)��(d��ng)һ��(g��)LED���F(xi��n)��(w��n)�}�r(sh��)ͬ��һ��(g��)ģ�K������LED����횱����Q���@�ͼӴ��˾S�ijɱ��� �ɷN��������^���Q����ȡģ�K��(g��u)�ɵķ�����(l��i)����һ��(g��)LED�c(di��n)��@ʾ�������˱���ģ�K��ȱ�c(di��n)���x���c(di��n)ꇔ�(sh��)�^С��ģ�K��(l��i)�pС���F(xi��n)�@һ��(w��n)�}���L(f��ng)�U(xi��n)�����Ԙ�(g��u)��һ��(g��)16��16��LED�c(di��n)����x���ĉK8��8�c(di��n)�ģ�K�� �D 2-2LED�c(di��n)ꇈD һ��(g��)16��16��LED�@ʾ���к��и���16֧���_�����܆ο�51��Ƭ�C(j��)�Ķ˿��(q��)��(d��ng)���Ա��Ҫ��(du��)��Ƭ�C(j��)�Ķ˿ڂ�(g��)��(sh��)�M(j��n)�ДU(ku��)չ����(j��ng)�����õĶ˿ڔU(ku��)չ�������ô����D(zhu��n)�QоƬ�M(j��n)���g�a�����õĴ����D(zhu��n)�QоƬ��74LS154��4��-16���g�a������74LS164��8λ�����D(zhu��n)�Q������74HC595�ȡ�51ϵ�І�Ƭ�C(j��)�˿ڵ��ƽ�r(sh��)������������_(d��)��������������һ�����(q��)��(d��ng)������������ƽ�r(sh��)��ݔ������H��(sh��)ʮ�̣�������С�������(sh��)�H�������_����������γɵģ��������ϛ](m��i)���(q��)��(d��ng)���������Ԇ�Ƭ�C(j��)����ֱ���(q��)��(d��ng)LED�@ʾ���@ʾ���چ�Ƭ�C(j��)���@ʾ��֮�g߀��Ҫ�����Թ��ܷŴ�λĿ�ĵ��(q��)��(d��ng)�·[7]�� 2.1.4 Ӳ���O(sh��)Ӌ(j��)������K������D2-3��ʾ����PC�C(j��)������λ�C(j��)�惦(ch��)��̎���@ʾ��(n��i)���ô���ͨ�ŵķ�ʽ���@ʾ��(n��i)�ݺͿ���ָ���ݔ?sh��)���Ƭ�C(j��)ϵ�y(t��ng)����Ƭ�C(j��)����(j��)��λ�C(j��)��ݔ��(l��i)�ă�(n��i)�ݺ�ָ��ͨ�^(gu��)�˿��g�a�U(ku��)չ���(q��)��(d��ng)4�K8��8LED�c(di��n)�ģ�K��(g��u)�ɵ�16��16��LED�c(di��n)��@ʾ�����}Ŀ���Դ˷�����ָ��(d��o)˼��չ�_(k��i)���w��Ӳ���·�O(sh��)Ӌ(j��)�� �D2-3 Ӳ���O(sh��)Ӌ(j��)���� 2.2 ϵ�y(t��ng)ܛ������ܛ�����O(sh��)Ӌ(j��)���˝M���O(sh��)Ӌ(j��)������߀���Ҫ�M�����x�����������d�;��g���O(sh��)Ӌ(j��)Ŀ��(bi��o)��Ӳ�����w�Y(ji��)��(g��u)�_������r�£�ܛ�����Է֞��������@ʾ�ӳ����N��Ч�@ʾ�ӳ���ͨ�ų�������(g��)��Ҫ���ֽM�ɡ����w�Y(ji��)��(g��u)��D2-4��ʾ�� �D2-4 ܛ�����ܽY(ji��)��(g��u)��D ܛ���ľ�����Ҫ����ܛ�������;��gܛ�������g��ɺ�߀��Ҫ���d����Ƭ�C(j��)�Ј�(zh��)�С�����ܛ��֮ǰ�������x��һ�N���m���Z(y��)���Լ����ľ����;��gܛ�������߀Ҫ�x��һ���c���x��Ƭ�C(j��)�����d�������dܛ����(l��i)�Ѿ����ij������d����Ƭ�C(j��)�Ј�(zh��)�С� ��3�� ϵ�y(t��ng)Ӳ���O(sh��)Ӌ(j��)3.1 Ӳ�����w�O(sh��)Ӌ(j��)���������ܷ��� �@ʾϵ�y(t��ng)���w�O(sh��)Ӌ(j��)��Ҫ����λ�C(j��)��ͨ��ϵ�y(t��ng)����Ƭ�C(j��)ϵ�y(t��ng)���g�a�·���@ʾ�(q��)��(d��ng)�·��16��16���c(di��n)��������ֽM�ɡ����w�������̞飺��λPC�C(j��)ͨ�^(gu��)ͨ��ϵ�y(t��ng)���Ƭ�C(j��)�l(f��)�Ϳ���ָ����@ʾ���a��(n��i)�ݣ���Ƭ�C(j��)���պ��(zh��)�п���ָ��̎���@ʾ���a���@ʾ��(n��i)��ͨ�^(gu��)I/O�ڴ���ݔ�����ҿ����g�a�·��ɴ����D(zhu��n)�Q����ݔ����������@ʾ�(q��)��(d��ng)�·�M(j��n)��늉��������̎�����_(d��)��LED�@ʾ�����@ʾ�����늉�Ҫ���M(j��n)��ʹ�@ʾ���@ʾ��(n��i)��[11]�� ����(j��)Ӳ���Ĺ��ܽY(ji��)��(g��u)�D�xȡ���m��������������Ҫ���܌�(sh��)�F(xi��n)��Ҫ��Ĺ���߀Ҫ�ܼ���������(g��)ϵ�y(t��ng)֮�С�ͨ�^(gu��)����Y�Ϻ͌�(du��)����K��Ӳ��ԭ��D��D3-1��ʾ�� 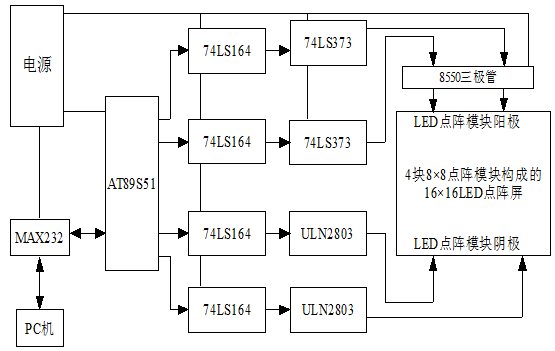 �D3-1 Ӳ��ԭ��D �D3-1 Ӳ��ԭ��D 3.2.2 ����ϵ�y(t��ng)�O(sh��)Ӌ(j��)�����·�O(sh��)Ӌ(j��)�в��õ��dž�Ƭ�C(j��)ϵ�y(t��ng)��ԓϵ�y(t��ng)���Ҫ�ǹ�����һ��(g��)��Сϵ�y(t��ng)��ָ��Ƭ�C(j��)�Ŀ��Ե���С����ϵ�y(t��ng)����AT89S51����Сϵ�y(t��ng)���������r(sh��)��·�͏�(f��)λ�·���x��һ����(sh��)����IO��������ƿڿ����ⲿ�ĸ��N�����͔�(sh��)��(j��)��ݔ��������(j��)�����x��һ���Ć�Ƭ�C(j��)�˿�������������������w�·��D3-2��ʾ�� ��ԓϵ�y(t��ng)�У�P1������Ҫ����LED�@ʾ��(sh��)��(j��)�Ŀ���ݔ�������ڶ˿ڵ��(q��)��(d��ng)������������ԓ�˿������5K����������(l��i)����(q��)��(d��ng)����������P1.5P1.6P1.7߀��(f��)�Þ�ISP���d���ܿڡ����w�ӷ��飺P1.0��P1.1��P1.4��P1.5�քe���ĉK74LS164��A�ˣ���74LS164���봮�Д�(sh��)��(j��)��(j��ng)�^(gu��)���D(zhu��n)�Q����ݔ����P1.2��P1.6�քe���к��е�74LS164��CLOCK�ˣ��a(ch��n)����λ�}�_�Ǵ��Д�(sh��)��(j��)����ݔ����P1.3��P1.7���к��е�CLEAR�ˣ���һ�M��(sh��)��(j��)��ɴ����D(zhu��n)�Q�����164оƬ�еă�(n��i)���D(zhu��n)�Q�µĔ�(sh��)��(j��)������P1.5P1.6P1.7߀��(f��)�Þ�ISP���d���ܿڡ�P2.0��164оƬ��ʹ�ܿ��ƶˣ���(d��ng)����ƽʹ���Sݔ����P2.2��P2.3���i����74LS373��OE��LE�˿����i�����Ĺ�����B(t��i)�� �˿�30��EA/VPP���ⲿ�L��(w��n)���S����ʹCPU�H�L��(w��n)�ⲿ����惦(ch��)������ַ��0000H��FFFFH����EA�˱�횱��ֵ��ƽ���ӵأ�����?y��n)�](m��i)�ДU(ku��)չ�ⲿ����惦(ch��)�����Ԍ�EA�Þ���ƽ�� �D3-2 ���Ʋ����·�D ����P3��������ܿڣ���ԓϵ�y(t��ng)�л����Dz�����ڶ����ܡ���ڶ����ܺ͌�(sh��)�H�\(y��n)�����3-1��ʾ�� ��3-1 AT89S51P3�ڵڶ����ܵđ�(y��ng)�� | | | | | �c��λ�C(j��)ͨ�ŵĔ�(sh��)��(j��)ݔ��� | | | �c��λ�C(j��)ͨ�ŵĔ�(sh��)��(j��)ݔ���� | | | �����I�Д࣬�����@ʾ��B(t��i) | | | �����I�Д࣬�����\(y��n)��ģʽ |
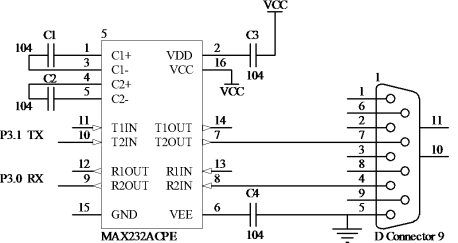
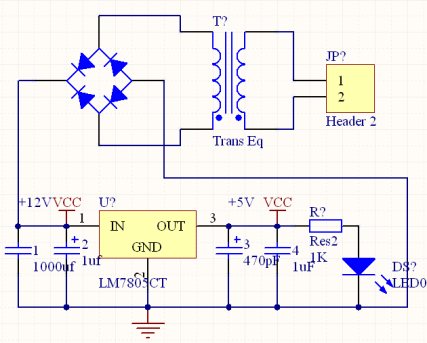
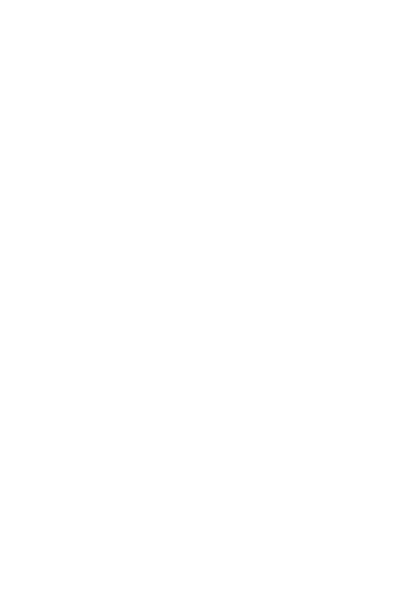
AT89S51��Ƭ�C(j��)��P1���L��(w��n)�ⲿ��(sh��)��(j��)�惦(ch��)�������惦(ch��)���r(sh��)���@�M�ھ��֕r(sh��)�D(zhu��n)�Q��ַ����8λ���͔�(sh��)��(j��)������(f��)�ã�P2�����L��(w��n)�ⲿ����惦(ch��)����16λ��ַ���ⲿ��(sh��)��(j��)�惦(ch��)���r(sh��)��P2���ͳ���8λ��ַ��(sh��)��(j��)������P1��P2�������ⲿ��(sh��)��(j��)�惦(ch��)���ͳ���惦(ch��)���ĔU(ku��)չ�ã��Ԃ��(n��i)���惦(ch��)���ͳ���惦(ch��)�������õ���r�r(sh��)ʹ��[12]�� 3.3 �g�a�·�O(sh��)Ӌ(j��)
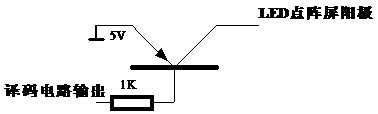
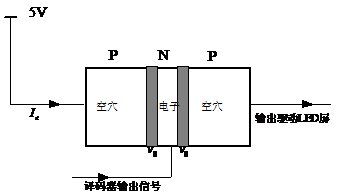
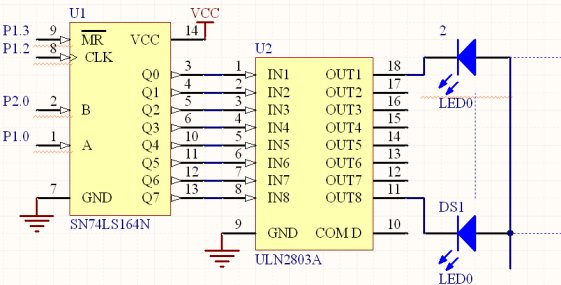
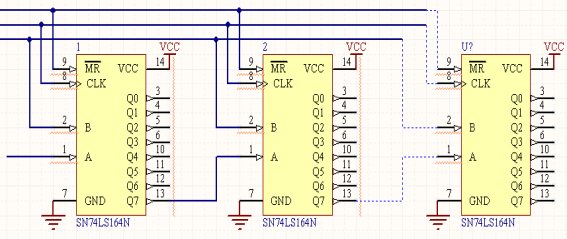
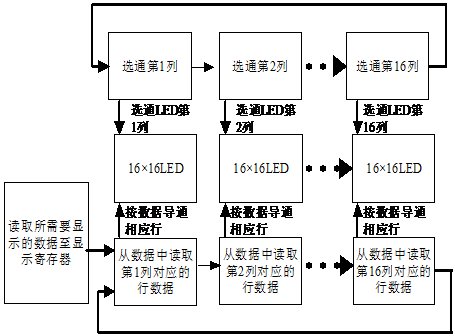
�g�a�·�Ĺ����Ǟ��˽�Q��Ƭ�C(j��)I/O�˿ڲ��㡣���g�a���������鴮���D(zhu��n)�Q��74LS164���i����74LS373�����w�·��D3-3��ʾ �D3-3 ���g�a�·�D 3.3.1 �����D(zhu��n)�Q��74LS164���g�a���õ���оƬ74LS164������������g�a�·��ȫ������Ƭ�C(j��)�Ķ˿�ݔ����(l��i)����16��16��LED�c(di��n)����@ʾ����Ҫ32��(g��)�˿ڡ����������g�a�·��H�H��Ҫ7��9��(g��)�˿ڱ�Ɍ�(sh��)�F(xi��n)�����@ʾ�����p����I/O�ڵ�ռ�Ô�(sh��)Ŀ�����Ƭ�C(j��)�U(ku��)չ���������A(y��)����(l��i)�˿��g�� 74LS164��һ��(g��)8λ��(sh��)��(j��)�Ĵ����D(zhu��n)�Q������(d��ng)����ˣ�CLEAR������ƽ�r(sh��)��ݔ���ˣ�QA��QH��������ƽ�����Д�(sh��)��(j��)ݔ��ˣ�A��B���ɿ��Ɣ�(sh��)��(j��)����(d��ng)A��B����һ��(g��)����ƽ���t��ֹ��(sh��)��(j��)ݔ�룬�ڕr(sh��)状ˣ�CLOCK���}�_������������Q0����ƽ����(d��ng)A��B��һ��(g��)����ƽ���t��һ��(g��)�����Sݔ�딵(sh��)��(j��)������CLOCK�����������Q��Q0�Ġ�B(t��i)�� ��3-1 74LS164��������(sh��) �@��Ҫ���Ƭ�C(j��)�����_ݔ���ĸߵ��ƽҪ��оƬ���R(sh��)�e������(n��i)�����ڲ��������xͨ�Ђ����@ʾ���a�ķ����������g�a�·��Ҳ������74L373�i��оƬ���@��Ҫ��74LS164оƬ��ݔ��Ҫ�M���i��оƬ�ĸߵ��ƽ�^(q��)�ַ������l��Ҫ�� 3.3.2 �i����74L373����74LS164оƬ�������i�湦�ܣ�������74LS164�M(j��n)�а�λ��(sh��)��(j��)�Ĵ����D(zhu��n)�Q�r(sh��)�����Д�(sh��)��(j��)�ĵ�һλ��(hu��)��QA������λ��QH,�ڶ�λ��(sh��)��(j��)��(hu��)��QA������λ��QG����������ڰ�λ��(sh��)��(j��)�D(zhu��n)�Q���֮ǰ74LS164оƬ��ݔ����(hu��)���F(xi��n)һ�Εr(sh��)�g�āy��ݔ�����@һ�Y(ji��)����(hu��)ͨ�^(gu��)�(q��)��(d��ng)�·���F(xi��n)���@ʾ���ϡ��Y(ji��)�������@ʾ���o(w��)��?q��)�ͨ�W�q�������@ʾ�����(n��i)�ݡ�����ڴ����D(zhu��n)�Q���ǰ����Ҫ74LS164��ݔ���ڲ��c�(q��)��(d��ng)�·��(d��o)ͨ�������x���i����74LS373��(l��i)����@һ���ܡ� 74LS373���D�i����(3S,�i�����Sݔ���лحh(hu��n)����)��373�����B(t��i)ݔ���İ�D���i����,����54/74S373��54/74LS373�ɷN��·�Y(ji��)��(g��u)��ʽ��(d��ng)���B(t��i)���S���ƶ�OE����ƽ�r(sh��)��O0~O7������߉��B(t��i)�����Á�(l��i)�(q��)��(d��ng)ؓ(f��)�d������(d��ng)OE����ƽ�r(sh��)��O0~O7�ʸ���B(t��i)�������(q��)��(d��ng)������Ҳ���鿂����ؓ(f��)�d�����i������(n��i)����߉��������Ӱ푡���(d��ng)�i�����S��LE����ƽ�r(sh��)��O�S��(sh��)��(j��)D��׃����(d��ng)LE����ƽ�r(sh��)��O���i�����ѽ����Ĕ�(sh��)��(j��)�ƽ�� ��3-2 74LS373��������(sh��)�� �ɱ��c�����^���Կ�����74LS164��ݔ���l���c74LS373��ݔ��l����ƥ�䣬��Փ�Ͽ��Ԍ�(sh��)�F(xi��n)�i������(du��)�g�a���Ĕ�(sh��)��(j��)�i�档 3.4 �(q��)��(d��ng)�·�O(sh��)Ӌ(j��)3.4.1 ���(q��)��(d��ng)�·�O(sh��)Ӌ(j��)�l(f��)����O�ܣ�LED(Light Emitting Diodes)����������ijЩ�댧(d��o)�w���ϵ�PN�Y(ji��)�У�ע����ٔ�(sh��)�d�����c����(sh��)�d���ӏ�(f��)�ϕr(sh��)��(hu��)�Ѷ���������Թ����ʽጷų���(l��i)���Ķ������ֱ���D(zhu��n)�Q����ܡ�PN�Y(ji��)�ӷ���늉����ٔ�(sh��)�d�����y��ע�룬�ʲ��l(f��)�⡣�@�N����ע��ʽ��°l(f��)��ԭ�������Ķ��O�ܽаl(f��)����O�ܣ�ͨ�QLED�� ���(q��)��(d��ng)����PNP���O��8550�ӷ���D3-4ʾ�� �D3-4 ���(q��)��(d��ng)����8550�Ľӷ� 8550��PNP�����O�ܣ���(n��i)���Y(ji��)��(g��u)��D3-5ʾ���l(f��)��Oe��5V�Դ�����O���g�a��̖(h��o)ݔ���ˣ���늘O��ݔ���(q��)��(d��ng)LED�c(di��n)�������(d��ng)�g�a���˿�ݔ������ƽ�r(sh��)���l(f��)��O�c���O늄�(sh��)���5V�� ���O�Ў�ؓ(f��)늵����Խ�^(gu��)PN�Y(ji��)�U(ku��)ɢ���l(f��)��^(q��)���l(f��)��O�a(ch��n)������ӔU(ku��)ɢ�����෴����������ڻ��O��Ӵ����U(ku��)ɢ���l(f��)��O��늘O��ӔU(ku��)ɢ�����O���γ������ ���O�Ў�ؓ(f��)늵����Խ�^(gu��)PN�Y(ji��)�U(ku��)ɢ���l(f��)��^(q��)���l(f��)��O�a(ch��n)������ӔU(ku��)ɢ�����෴����������ڻ��O��Ӵ����U(ku��)ɢ���l(f��)��O��늘O��ӔU(ku��)ɢ�����O���γ������ ����(d��ng)�g�a���˿�ݔ�����ƽ�r(sh��)�l(f��)��O�c���O֮�g��늄�(sh��)���5V�� ����(d��ng)�g�a���˿�ݔ�����ƽ�r(sh��)�l(f��)��O�c���O֮�g��늄�(sh��)���5V�� �� �� �����ڰl(f��)��O�c���O֮�g늄�(sh��)��Ĝp�ٻ��O�����l(f��)��O�U(ku��)ɢ����Ӕ�(sh��)���p�ٹʼ�늘O���Ҳ�S֮�p�١���8550���(q��)��(d��ng)�·�����ṩ�(q��)��(d��ng)������xͨ�_(k��i)�P(gu��n)�����á� �����ڰl(f��)��O�c���O֮�g늄�(sh��)��Ĝp�ٻ��O�����l(f��)��O�U(ku��)ɢ����Ӕ�(sh��)���p�ٹʼ�늘O���Ҳ�S֮�p�١���8550���(q��)��(d��ng)�·�����ṩ�(q��)��(d��ng)������xͨ�_(k��i)�P(gu��n)�����á� �D3-5 8550��(n��i)���Y(ji��)��(g��u)�D 3.4.2 ���(q��)��(d��ng)�·�O(sh��)Ӌ(j��)���(q��)��(d��ng)����ULN2803��ULN2803��һ�N��늉�������_(d��)���D����Ѓ�(n��i)���Y(ji��)��(g��u)��D��ԓ����еİ˂�(g��)NPN�_(d��)���D�B�Ӿ��w���ǵ�߉�ƽ��(sh��)���·����TTL,CMOS��PMOS���ʹ������늉��ğ����^�������ӡ�C(j��)�N���������ؓ(f��)�d�g�Ľӿڵ������������V������Ӌ(j��)��C(j��)�����I(y��)�����M(f��i)a(ch��n)Ʒ�С����������м�늘O�_(k��i)·ݔ��������˲׃���Ƶ��m(x��)����λ���O�ܡ���늘Oݔ�����ʿ��_(d��)50V��600mA[13]�� ULN2803�������(q��)��(d��ng)��(zh��)�е������x�Ĺ�������(d��ng)�xͨ����ݔ����ƽ�r(sh��)�䌦(du��)��(y��ng)��ݔݔ�����ƽ������(du��)��(y��ng)��ݔ��ȡ���������ṩ�^��Ĺ������(l��i)�������(q��)��(d��ng)�����M(j��n)�^(gu��)�@ʾ�������������w�·��D3-7��ʾ�� �D3-7 ���(q��)��(d��ng)ԭ��D 3.5 ͨ��ϵ�y(t��ng)Ӳ���O(sh��)Ӌ(j��)AT89S51��Ƭ�C(j��)����ȫ�p������UARTͨ����֧�ֆ�Ƭ�C(j��)�M(j��n)�Д�(sh��)��(j��)�Ĵ��Ђ�ݔ�����ˆ�Ƭ�C(j��)Ҫ�cPC�C(j��)�ƶ�ͨ�Ņf(xi��)�h���_���l(f��)��������߀��Ҫ��Q�Ć�(w��n)�}������̖(h��o)�ƽ��(w��n)�}��RS-232C��(bi��o)��(zh��n)Ҏ(gu��)����PC�C(j��)�l(f��)�͔�(sh��)��(j��)����TXD�ͽ��Ք�(sh��)��(j��)����RXD����EIA�ƽ�������͔�(sh��)�֡�1���r(sh��)��ݔ���ϵ��ƽ�ڣ�3����15V֮�g�����͔�(sh��)�֡�0���r(sh��)����ݔ���ϵ��ƽ�ڣ�3����15֮�g������Ƭ�C(j��)���пڲ�����߉TTL�ƽ������(sh��)�֡�1���r(sh��)�飫5V��(sh��)�֡�0���r(sh��)��-5V�����Ԇ�Ƭ�C(j��)�cӋ(j��)��C(j��)����ֱ�����B�M(j��n)��ͨ�ű�회�RS-232C�cTTL�ƽ�M(j��n)���D(zhu��n)�Q[14]�� ��ͨ�õ��ƽ�D(zhu��n)�QоƬ��MAX232ϵ�е�оƬ�Լ��ɶȸߣ��Σ�5V�Դ������ֻ�����5��(g��)С��ݼ������RS-232C�cTTL�ƽ֮�g���D(zhu��n)�Q���ɞ��Ƭ�C(j��)ϵ�y(t��ng)�еij���оƬ����ԓ�@ʾϵ�y(t��ng)�У�MAX232��ͨ��ϵ�y(t��ng)������Ҫ��Ӳ���M�ɲ���[15]���·��D3-8��ʾ�� �D3-8 ����ͨ��ϵ�y(t��ng)�·�D 3.6 �Դ�O(sh��)Ӌ(j��)��ϵ�y(t��ng)��MAX232��74LS164��74LS373��AT89S51����Ҫ5V�Ĺ��늉�����ϵ�y(t��ng)�_(k��i)�l(f��)�^(gu��)���п���ʹ����XUSB��늡��ڌ�(sh��)�H�Ĵ���ĻLED�@ʾ���O(sh��)Ӌ(j��)�У�����XUSB������@���Ќ�(sh��)�H���˕r(sh��)��Ҫ��(du��)���õ�220V�M(j��n)�н���������5Vֱ��늉����@ʾϵ�y(t��ng)��늡��·�D��D3-9��ʾ�� �D3-9 �Դԭ��D ��D��ʾ����220V�D(zhu��n)12V��׃�����M(j��n)�н�������ͨ�^(gu��)һ��(g��)��ʽ�����·�������������ֱ��늡����ͨ�^(gu��)5V���˷�(w��n)��ģ�KLM7805�ó���(w��n)����5Vݔ���� 3.7 ��(j��)�B����ĻLED�@ʾ�� Ҫ��(sh��)�F(xi��n)LED�Ĵ���Ļ�@ʾ��Ҫ���Ã�(n��i)���g�a����(j��)�B�Ͷ���(g��)��Ƭ�C(j��)ϵ�y(t��ng)��(j��)�B�ķ������g�a����(j��)�B��D3-10��ʾ ����1��(g��)74LS164��Q7�˽ӵ�2��(g��)74LS164��A�ˣ�����2��(g��)74LS164��Q7�˽ӵ�3��(g��)74LS164��A�ˣ�������Ʈ�(d��ng)N�K74LS164�༉(j��)�B�r(sh��)��׃?y��u)�һ��(g��)����ݔ��7��N��ݔ���Ĵ����D(zhu��n)�Q�����@�N��(j��)�B�ă�(y��u)�c(di��n)����һ�K��Ƭ�C(j��)����ͬ�r(sh��)���Ƹ����LED�c(di��n)��@ʾ������74LS164�ăr(ji��)��������w�ɱ��õ��˽��͡������@�N��(j��)�B����Ҳ����һ����ȱ�c(di��n)��51ϵ�еĆ�Ƭ�C(j��)�ľ����l�ʲ���74LS164��(j��)�B�^(gu��)����(hu��)����һ�Β���ĕr(sh��)�g�Ķ���(d��o)���@ʾ���F(xi��n)�W�q���Ķ˿�ݔ�����@ʾ��(sh��)��(j��)���@ʾҲҪ��������(y��ng)�ĸ�׃�� �D3-10 74LSL64��(j��)�B ��(g��u)������ĻLED�@ʾ������һ�N�����nj����^С��LED�@ʾϵ�y(t��ng)����ģ�K�M(j��n)�м�(j��)�B����D3-11��ʾ���ɪ�(d��)����LED�@ʾϵ�y(t��ng)�M��һ��(g��)���LED�@ʾϵ�y(t��ng)�����и����@ʾϵ�y(t��ng)֮�g�ڹ��ܺͿ����϶������(d��)���ģ���һ������Ļ�����֞�KС�����ٷքe���뵽����ϵ�y(t��ng)�У�����ϵ�y(t��ng)ͬ���@ʾ����Եõ�һ����Į��档ʹ���@�N��(j��)�B���k�����Ա���51��Ƭ�C(j��)�����l�ʵ͵����c(di��n)��������(sh��)�F(xi��n)����Ļ���@ʾ�����@�N������Ȼ�����y�c(di��n)��һ�Ǹ���(d��)������ϵ�y(t��ng)��ͨ�źͅf(xi��)�{(di��o)��Ҫ������ˣ����Ҫ��(sh��)�F(xi��n)�@ʾ��(n��i)�ݵČ�(sh��)�r(sh��)�Ա����Ҫ��λ�C(j��)��������@ʾ��(n��i)�݄t��������λ�C(j��)��ͨ�Ŕ�(sh��)��(j��)��������(g��)�Ć�Ƭ�C(j��)���͔�(sh��)��(j��)Ҳ��(hu��)Ӱ�����(g��)����ĸ����ٶȣ����dzɱ�����ˡ� �D3-11 ����ϵ�y(t��ng)��(g��u)������ĻLED�@ʾ�� �ڌ�(sh��)�H��(y��ng)����ͨ�����Ã�(n��i)���U(ku��)չ���ⲿ��(j��)�B(li��n)��ʹ�õķ�����(l��i)��(g��u)������ĻLED�@ʾ��Ļ�������ӆ�(g��)�@ʾϵ�y(t��ng)�@ʾ��Ļ��С��ͬ�r(sh��)����(g��)���@ʾϵ�y(t��ng)��(j��)�B��Ԕ��(x��)Ӳ��ԭ��DҊ(ji��n)���1��
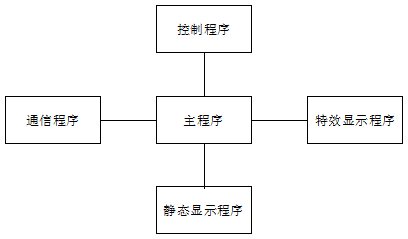
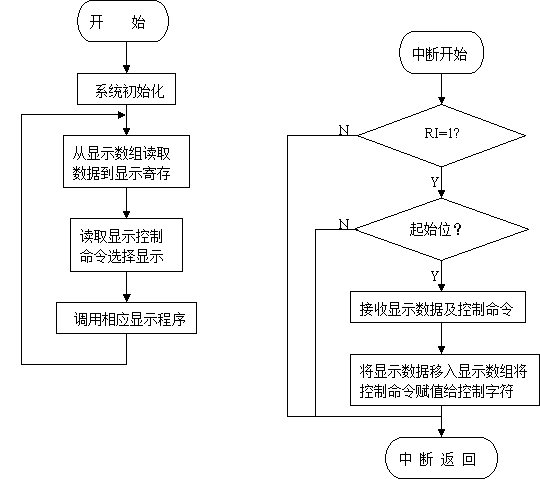
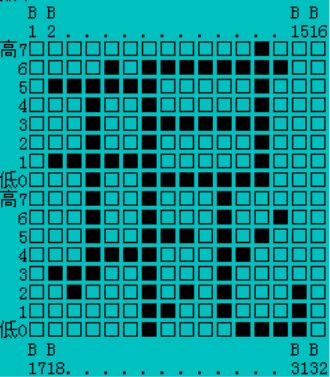
��4�� ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)4.1 �����O(sh��)Ӌ(j��)ϵ�y(t��ng)ܛ������C�Z(y��)�Ծ���������ģ�K�����O(sh��)Ӌ(j��)˼·�O(sh��)Ӌ(j��)�����ȷ���������Ҫ��(sh��)�F(xi��n)�Ĺ��ܣ�����Ҫ��(sh��)�F(xi��n)����ͨ�ţ��o�B(t��i)�@ʾ����(d��ng)�B(t��i)�@ʾ�����ܡ��书�ܽY(ji��)��(g��u)��D2-4��ʾ��ͨ�ų��������λ�C(j��)��(sh��)��(j��)�����o������̎����ͨ�^(gu��)���Ƴ����x��ͬ���@ʾ�����M(j��n)���@ʾ�� ������Ĺ���������D4-1��ʾ�� �D4-1���������̈D �����_(k��i)ʼ�r(sh��)���ȱ�회�(du��)��Ƭ�C(j��)�M(j��n)�г�ʼ�������г�ʼ���ă�(n��i)�ݰ������Д���(y��u)�ȼ�(j��)���O(sh��)�����Д��ʼ��������ͨ�ŕr(sh��)ͨ�ŷ�ʽ���x��Ͳ����ʵ��O(sh��)������IO�ڹ��ܵ��O(sh��)���ȡ���ʼ����ɺ�����M(j��n)����C(j��)��B(t��i)�ȴ��Д�İl(f��)����ԓ��������Ҫ�õ��˃ɂ�(g��)�ⲿ�Д�Դ�ʹ����Дࡣ�ⲿ�Д�Դ�ɰ��I���ƽ׃���|�l(f��)���ⲿ�Д���Ҫ�������x��LED�c(di��n)��@ʾ���Ŀ��Ʒ�ʽ���ɰ��I����߀����λ�C(j��)���ƺ��@ʾ��B(t��i)���o�B(t��i)�@ʾ߀�DŽ�(d��ng)�B(t��i)�@ʾ�������Д�����l(f��)���Д�ͽ����Д����ܛ���|�l(f��)���Д�a(ch��n)�������A(y��)�ȳ�ʼ���r(sh��)�O(sh��)�����D(zhu��n)��(zh��)���Д��ӳ����Д�����O(sh��)����LED�c(di��n)��@ʾ����Ҫ�@ʾ�ă�(n��i)�ݺ��@ʾ�ķ�ʽ������(zh��)�е��Ǹ��N�@ʾ�������O(sh��)���ķ�ʽ�̓�(n��i)���@ʾ������Ҫ�ă�(n��i)�ݡ� 4.2 �@ʾ������O(sh��)Ӌ(j��)4.2.1 LED�@ʾ�����@ʾ��ʽLED�c(di��n)����@ʾ��ʽ��Ҫ���o�B(t��i)�@ʾ�̈́�(d��ng)�B(t��i)�����@ʾ�ɷN�� ��(du��)�o�B(t��i)�@ʾ��(l��i)�f(shu��)��ÿһ��(g��)�l(f��)����O�ܶ���Ҫһ���(q��)��(d��ng)�·��һ������ݔ���Ժ���һ�����ݵ��@ʾ�������҂���׃���@ʾ��(n��i)�ݣ���Ҫ����ݔ���µ��c(di��n)ꇔ�(sh��)��(j��)���@�N��ʽϵ�y(t��ng)ԭ������(du��)��(ji��n)��һЩ����������g�a�(q��)��(d��ng)�b���ܶ࣬����������s�������ڴ���Ļ�����죬�ɱ��ߣ���ɿ���Ҳ�^�ͣ� ��һ�N��(d��ng)�B(t��i)�����@ʾ�ǰ�����(g��)LED��Ļ�ֳ����ɲ��֣�ÿһ��������@ʾ���@ʾ��һ���ֺ����@ʾ�ڶ����֡���ֱ���@ʾ�����һ�����������_(k��i)ʼ�@ʾ��һ���֣��؏�(f��)ѭ�h(hu��n)�M(j��n)�У����؏�(f��)�����ٶ��������r�£��҂������ľ���һ����(w��n)���Į��森Ҳ�����f(shu��)���Ä�(d��ng)�B(t��i)�����@ʾ��Ҫ�����M(j��n)�Ю����ˢ�£����@�N��ʽ�����@ʾ�(q��)��(d��ng)�·���؏�(f��)���ã�����Ҳ���p�٣��Ķ�ʹӲ���ɱ����ͣ�����Ļ�ϵİl(f��)����O��݆���l(f��)�⣬ʹ�Õr(sh��)�ĺ������ͣ�����Ļ�����졢�S�o(h��)Ҫ�����S�࣬�ɿ���Ҳ�����ˣ� �ɷN�@ʾ��ʽ�ı��^�ٽY(ji��)��51��Ƭ�C(j��)IO�ڔ�(sh��)������ԭ��Q�����Ä�(d��ng)�B(t��i)����ķ�ʽ�M(j��n)���@ʾ�� ��(d��ng)�B(t��i)����֞��В�����В���ɷN��ʽ�^(q��)�e�����xͨ�˺͔�(sh��)��(j��)ݔ��˷քe����߀���С���ԓ�@ʾϵ�y(t��ng)�В����@ʾ�Ĺ���ԭ����D4-2��ʾ�����xͨ��Ȼ����?g��u)�������?du��)��(y��ng)�еĔ�(sh��)��(j��)���@�ӏĵ�1�е���16��ѭ�h(hu��n)����(f��)��ֻҪ�ГQ���ٶ����Ŀ��������۵��ӕr(sh��)���ԾͿ��Կ�Ҋ(ji��n)һ����(w��n)���Į��档 �D4-2�����@ʾ����ԭ��D 4.2.2 �c(di��n)ꇔ�(sh��)��(j��)���_(d��)��ʽԓ�@ʾϵ�y(t��ng)���@ʾ��(sh��)��(j��)��ȡ�v��ȡģ��������Ĕ�(sh��)��(j��)�惦(ch��)��ʽ��D4-3�� �D4-3 �c(di��n)ꇔ�(sh��)��(j��)ԭ��D ����(sh��)��(j��)�ǿv��ģ�һ��(g��)���،�(du��)��(y��ng)һ��(g��)λ��8��(g��)���،�(du��)��(y��ng)һ��(g��)�ֹ�(ji��)���ֹ�(ji��)��λ������ϸ��µͣ�������ϵ���8��(g��)�c(di��n)�Ġ�B(t��i)�ǡ�*-----*-��(*����c(di��n)��-����c(di��n))���t�D(zhu��n)�Q����ģ��(sh��)��(j��)��0x82(B1000_0010)����D(4-3)��ʾ��һ��16��16���c(di��n)ꇮ����c(di��n)ꇔ�(sh��)��(j��)����B1B2B3����B31B32�惦(ch��)������һ������Ĕ�(sh��)��(j��)����32�ֹ�(ji��)�������@ʾ�r(sh��)�xͨ�ĵ�i�Ќ�(du��)��(y��ng)�Ĕ�(sh��)�MԪ�؞��i��i+16��(g��)Ԫ��[16]�� 4.2.3 �@ʾ������O(sh��)Ӌ(j��)�@ʾ����֞��o�B(t��i)�@ʾ���������@ʾ�������@ʾ�������@ʾ�������@ʾ��N�N�@ʾ��ʽ���������������Ƅ�(d��ng)�����{(di��o)�����o�B(t��i)�@ʾ����?y��n)��ӳ����o�B(t��i)�@ʾ�������̈D��D4-4��ʾ��
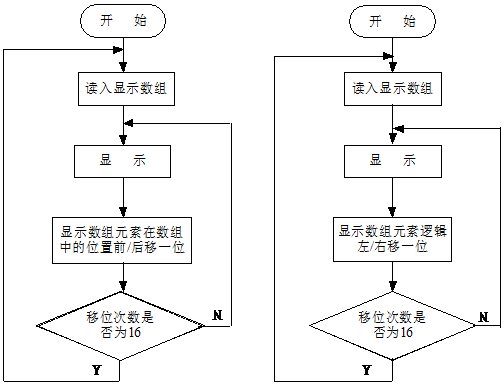
�D4-4 �o�B(t��i)�@ʾ�������̈D �@ʾ���õ����В�����@ʾ��ʽ���xͨһ�к������c��(sh��)��(j��)Ԫ�صČ�(du��)��(y��ng)�P(gu��n)ϵ��i�Ќ�(du��)��(y��ng)���Д�(sh��)��(j��)�锵(sh��)�M�еĵ�i�͵�i+16��(g��)Ԫ�ء�����(du��)��(y��ng)Ԫ�ص��ɵ�����λ���ΏĶ˿�ݔ�����w�����錢Ԫ������߉��λ�����c0X01���c�����ýY(ji��)��ͨ�^(gu��)��Ƭ�C(j��)�˿�ݔ���������D(zhu��n)�Q����A�ˣ��i�����i���������һ�Д�(sh��)��(j��)��λ���ٌ���ݔ�����������ѭ�h(hu��n)�xͨ���Ё�(l��i)�@ʾ���讋��[17]�� �D4-5 ������/�����Ƴ������̈D ��(d��ng)�B(t��i)�@ʾ����������D4-5��ʾ������(j��)�@ʾ��(sh��)��(j��)�Ĵ惦(ch��)ԭ��ͨ�^(gu��)��׃��(sh��)�HLED���c��(sh��)��(j��)߉�еķ�����(l��i)��(sh��)�F(xi��n)����������Ƅ�(d��ng)���@ʾ��(sh��)��(j��)�c�еČ�(du��)��(y��ng)�P(gu��n)ϵ�飺��i�Ќ�(du��)��(y��ng)�Ĕ�(sh��)��(j��)�锵(sh��)�M��i�͵�2��i��(g��)��(sh��)��(j��)�����Ԯ�(d��ng)ULN2803�xͨ�r(sh��)���������һ�еĔ�(sh��)��(j��)�t�ஔ(d��ng)�ڮ���������λ��ͬ������ǰһ�Д�(sh��)��(j��)�ஔ(d��ng)������һλ�����ѭ�h(hu��n)�t�a(ch��n)��һ����(w��n)���\(y��n)��(d��ng)�Į��档 �@ʾ��(sh��)�M�У���1��16��(g��)Ԫ�صĵ�8����1λLED�@ʾ���еĵ�1����8�С�ͬ����17��32��(g��)Ԫ�صĵ�8����1λLED�@ʾ���еĵ�9����16�С����Ԍ�Ԫ��?c��i)?sh��)��(j��)�M(j��n)��߉λ�Ʊ��ܮa(ch��n)�������Ƅ�(d��ng)��Ч��[18]�� 4.3 ͨ�ų�����O(sh��)Ӌ(j��)ϵ�y(t��ng)���ô����Д�ķ�ʽ�M(j��n)��ͨ�š�MCS-51��Ƭ�C(j��)���傀(g��)�Д�Դ�ɷN��ͣ�һ����ⲿ�Д�Դ����һ��ǃ�(n��i)���Д�Դ�������ɂ�(g��)���r(sh��)��/Ӌ(j��)��(sh��)����T0��T1��������Д�ʹ��пڵĽ��պͰl(f��)���ДࡣMCS-51��Ƭ�C(j��)�O(sh��)����4��(g��)���üĴ��������Д���ƣ��քe�鶨�r(sh��)�����ƼĴ�����TCON�������п��Д��������SCON�����Д����S���ƼĴ�����IE�����Д���(y��u)�ȼ�(j��)���ƼĴ�����IP�������̕r(sh��)ͨ�^(gu��)�O(sh��)�����B(t��i)��(l��i)�����Д�ϵ�y(t��ng)�� �ھ��Д����r(sh��)�����nj��Д���ƼĴ�����IE����ʼ���������λ�ֲ������EA���Д����S������λ��EA=1�r(sh��)CPU�_(k��i)�l(f��)�ДࣻEA��1�r(sh��)��CPU���������ДࡣES��ET��EX1��ET0��EX0�錦(du��)��(y��ng)�Ĵ��п��Дࡢ���r(sh��)��/Ӌ(j��)��(sh��)��1�Дࡢ�ⲿ�Д�1�Дࡢ���r(sh��)��/Ӌ(j��)��(sh��)��0�Дࡢ�ⲿ�Д�0�Д���Д����Sλ����(du��)��(y��ng)λ��1�r(sh��)���S���Д࣬��(du��)��(y��ng)λ��0�r(sh��)����ֹ���Дࡣ ��4-1 �Д����S�Ĵ�����ʽ
���Գ�ʼ���r(sh��)�O(sh��)���Д����S�Ĵ�����ֵ��0XFF��ָ��� IE=0XFF�������O(sh��)Ӌ(j��)�r(sh��)߀Ҫ���]���Д���(y��u)�ȼ�(j��)�Ć�(w��n)�}����?y��n)鲻ͬ���Д�ͬ�r(sh��)�a(ch��n)����CPU푑�(y��ng)�����ȡ�Q�ڃ�(n��i)����ԃ��� �O(sh��)�ô��ڹ�����ʽ1��������9600��Ӌ(j��)��ɵ�Ӌ(j��)��(sh��)����ֵ��ʮ���M(j��n)�Ʊ�ʾ��0XFD��ͨ�Ņf(xi��)�h���4-2��ʾ�� ��4-2 ����ͨ�Ŕ�(sh��)��(j��)�Y(ji��)��(g��u) ��(sh��)��(j��)�Y(ji��)��(g��u) | | ��2����33��(g��)�ֹ�(ji��) | | | | | | | �Д��Ƿ��_(k��i)ʼ���Ք�(sh��)��(j��) | | |
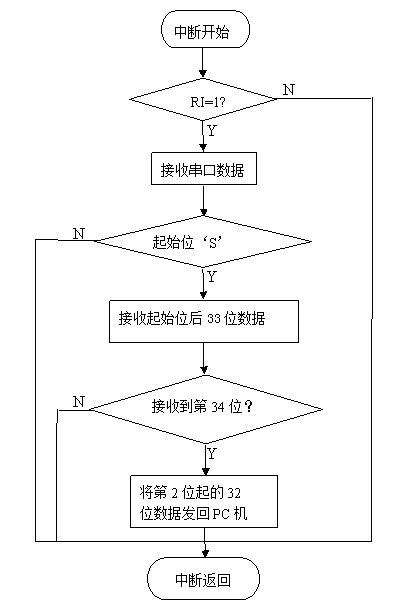
���w�����Д�������̈D��D4-6��ʾ���������������M(j��n)���˴����Д�ij�ʼ������ʼ����(n��i)�ݰ����˴��й�����ʽ�x�����ʵ��O(sh��)����Ӌ(j��)��(sh��)��ֵ���O(sh��)���������_(k��i)ʼ�M(j��n)���Д�ȴ�����(d��ng)PC�C(j��)���Ƭ�C(j��)�l(f��)�͔�(sh��)��(j��)�r(sh��)�a(ch��n)���Д�������SλRI��1����SBUF�����_�Ĵ������е�ֵݔ�뵽���������M(j��n)�Д�(sh��)��(j��)̎���������Д���(sh��)��(j��)�Ƿ��O(sh��)������ʼ��(bi��o)־λ��S������DŽt�_(k��i)ʼ������ʼλ���33��(g��)�ֹ�(ji��)�����DŽt�Д���^�m(x��)�ȴ������յ���34��(g��)�ֹ�(ji��)��㌢�յ��Ĕ�(sh��)��(j��)�l(f��)�ͻ�PC�C(j��)�M(j��n)���(y��n)�C���^�� �D4-6 ͨ�ų������̈D ����ܛ��������ɺ�횽�(j��ng)�^(gu��)���g���ܱ���Ƭ�C(j��)�R(sh��)�eʹ�á����˜pСܛ�����ĺ̓�(y��u)���y�ȣ��ȰѸ��ӳ���?q��)���һ��(g��)�ɆΪ�(d��)��(zh��)�е����������ӳ����g�](m��i)���e(cu��)�`����ݔ���Ƭ�C(j��)�M(j��n)���(y��n)�C���@���(xi��ng)��ͨ�^(gu��)���ٌ����еij������ϵ�һ���γ�һ��(g��)�����ij������M(j��n)�о��g���(y��n)�C��Ԕ��(x��)����Ҋ(ji��n)���2��
��5�� ϵ�y(t��ng)�{(di��o)ԇ
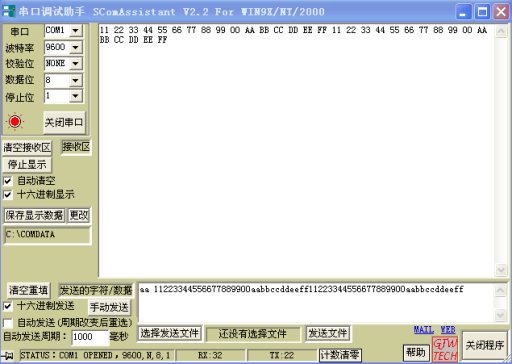
Ӳ��������ܛ�������^(gu��)�ó���(sh��)����D5-1��ʾ����(sh��)����ɺ��회�(du��)���M(j��n)���{(di��o)ԇ���z���O(sh��)Ӌ(j��)�����Ƿ�(sh��)�F(xi��n)�ˡ�ܛ��Ӳ����ɺ��_(k��i)ʼ�M(j��n)���{(di��o)ԇ���{(di��o)ԇ�ɷ֞�Ӳ���{(di��o)ԇ��ܛ���{(di��o)ԇ��ϵ�y(t��ng)(li��n)���{(di��o)ԇ���D5-1 ��(sh��)��D 5.1 ϵ�y(t��ng)Ӳ�������{(di��o)ԇ����Ӳ���{(di��o)ԇ��Ҫ���{(di��o)ԇ�����ֵĺ����Ƿ�ϸ��оƬ��ݔ��ݔ��늉��Ƿ�����O(sh��)Ӌ(j��)Ҫ�����y(c��)ԇ��Ӳ�������ܷ�����O(sh��)Ӌ(j��)���ܡ���˰�Ӳ���{(di��o)ԇ���������IJ��ֲַ���(l��i)�M(j��n)�У� ��1���y(c��)ԇ���к��c(di��n)�Ƿ��ж�·��̓���ĬF(xi��n)����ڣ� ��2��ͨ늜y(c��)ԇ����Ӳ��оƬ��ݔ��ݔ��늉��Ƿ����O(sh��)Ӌ(j��)Ҫ��ķ�����(n��i)�� ��3���y(c��)ԇISP���Ծ��Ĺ����Ƿ��܉�?q��)��F(xi��n)�� ��4���y(c��)ԇ����ϵ�y(t��ng)��ͨ�Ź����Ƿ��܉�?q��)��F(xi��n)�� ��������Ҫ���@ʾϵ�y(t��ng)���ܵĜy(c��)ԇ��Ҫܛ�����������Ӳ���{(di��o)ԇ����ֻ�y(c��)ԇ��Ƭ�C(j��)��(f��)λ�ƽ�����ܲ��֜y(c��)ԇ����ϵ�y(t��ng)(li��n)���{(di��o)ԇ���ց�(l��i)��ɡ� 5.1.1 ��·�c̓���z�y(c��) �z�y(c��)���ߞ��f(w��n)�ñ���ʹ���f(w��n)�ñ��Ķ�·��(b��o)�����ܣ�����(g��)�y(c��)ԇ���R�ăɂ�(g��)���c(di��n)�z�y(c��)�Ƿ��·�������·�D�z�y(c��)��Ҫ�B�ӵă��c(di��n)�Ƿ��·��(l��i)�z�y(c��)�Ƿ��ѽ�(j��ng)�B���ϣ��Դˁ�(l��i)�z�y(c��)̓������r���z�y(c��)������ɺ����һ��ͨ늙z�y(c��)�ų��˶�·��Σ�U(xi��n)������̓������z�y(c��)�Y(ji��)�����挍(sh��)���韩�� 5.1.2 ��늜y(c��)ԇ����ϵ�y(t��ng)�y(c��)ԇ�r(sh��)�Dz���USB�Դ��ϵ�y(t��ng)�Դ�������Դݔ�붼��5V���@ʾϵ�y(t��ng)�І�Ƭ�C(j��)���g�a�����i�������(q��)��(d��ng)�·���Դ늉���Ҫ���5V���Կ�ͬ�r(sh��)ֱ�ӽ��롣 ��늺������^���·�Ƿ����^(gu��)�ᣬ��ζ��ð���ĬF(xi��n)����F(xi��n)����(j��ng)�^(gu��)�^�죬�](m��i)���@Щ�F(xi��n)����F(xi��n)��Ȼ��y(c��)ԇ���������Դ���ӵؼ�һЩ�ƽ��(y��ng)ԓ�̶��Ķ˿ڵ�늉����y(c��)ԇ�ĽY(ji��)���飺�������Դ����4.3V��4.8V֮�g�M���������Դ늉�Ҫ��Ƭ�C(j��)�˿���δ��ؓ(f��)�d�r(sh��)�˿�늉���4.5V�� 5.1.3 �����{(di��o)ԇ���ڲ��ֵ����Þ��Ƭ�C(j��)�cPC�C(j��)֮�gͨ�ţ�Ҫ�z��Ӳ���Ƿ������������Բ��Ì�MAX232оƬ�Ć�Ƭ�C(j��)��ݔ�����cݔ���ֱ�����B���k����(l��i)�y(c��)ԇ�����w�·�D��D5-2��ʾ����MAX232�ĵ�10�˺͵�9��ֱ�Ӷ̽ӡ������ϱ�ʾ����Ƭ�C(j��)��ݔ�����cݔ���ֱ�����B����Ƭ�C(j��)�յ���(sh��)��(j��)��ͬ�r(sh��)�͌���(sh��)��(j��)�l(f��)�ͻ�PC�C(j��)������l(f��)�͵Ĕ�(sh��)��(j��)�܉��Մt�C������ͨ�Ų��ֵ�Ӳ���������ġ���19���������c��XCOM1��ӣ�ͨ�^(gu��)�����{(di��o)ԇ���ְl(f��)�Ͳ�ͬλ��(sh��)�Ĕ�(sh��)��(j��)���ڰѰl(f��)�͵Ĕ�(sh��)��(j��)�c���Ք�(sh��)��(j��)����^�� �D5-2 ����Ӳ���{(di��o)ԇ 5.2 ϵ�y(t��ng)ܛ���{(di��o)ԇ���������ѽ�(j��ng)�M(j��n)����Ӳ���{(di��o)ԇ������ܛ���{(di��o)ԇ��Ҫ��ܛ�����g�͌������܉K����քe�������(y��n)�C�书�ܵĿɌ�(sh��)�F(xi��n)�ԡ����M(j��n)�й����{(di��o)ԇǰ�����KEIL C��(du��)���г����M(j��n)�о��g�����g�ɹ����a(ch��n)�Ɉ�(zh��)�е�.hex���M(j��n)�й��ܜy(c��)ԇ�� ���Мy(c��)ԇ���ڳ���Ĺ����Ƿ����Ʋ���Ҫ�B�ӆ�Ƭ�C(j��)ϵ�y(t��ng)߀Ҫ���������{(di��o)ԇ���ߡ������{(di��o)ԇ�����x�õ��Ǵ����{(di��o)ԇ���֣��书���ǰ����O(sh��)���Ĵ��ڡ����������Ƭ�C(j��)�l(f��)�͔�(sh��)��(j��)�ͽ��Ն�Ƭ�C(j��)��PC�C(j��)�l(f��)�͵Ĕ�(sh��)��(j��)�������ܰѰl(f��)�ͺͽ��յĔ�(sh��)��(j��)��(n��i)���@ʾ�ڠ�B(t��i)�ڃ�(n��i)�����ֻҪ�O(sh��)��PC�C(j��)���Ƭ�C(j��)�l(f��)�͵ă�(n��i)�ݺ͆�Ƭ�C(j��)��PC�C(j��)�l(f��)�͵ă�(n��i)�ݾͿ���ͨ�^(gu��)�����{(di��o)ԇ�����(y��n)�C����ͨ���Ƿ��(zh��n)�_���Ƿ�M�㹦��Ҫ�� ���ڳ�����O(sh��)Ӌ(j��)�飺�O(sh��)��������λ9600����0XAA����ʼ��(bi��o)־λ,��Ƭ�C(j��)��������ʼ��(bi��o)־λ���32λʮ���M(j��n)�Ɣ�(sh��)�ٰl(f��)�͕�(hu��)PC�C(j��)���y(c��)ԇ����r(sh��)�O(sh��)�������ʞ�9600���x��1���o(w��)У�(y��n)��8λ��(sh��)��(j��)��PC�C(j��)���Ƭ�C(j��)�l(f��)�͵ă�(n��i)�ݞ�aa 11223344556677889900aabbccddeeff11223344556677889900aabbccddeeff��PC�C(j��)�յ��Ĕ�(sh��)��(j��)�� 11 22 33 44 55 66 77 88 99 00 AA BB CC DD EE FF 11 22 33 44 55 66 77 88 99 00 AA BB CC DD EE FF���y(c��)ԇ�������ڳ���ʹ����·��(sh��)�F(xi��n)���O(sh��)Ӌ(j��)Ŀ�ġ����M(j��n)�Д�(sh��)�β�ͬ��(sh��)��(j��)�İl(f��)�ͣ����յ��Ĕ�(sh��)��(j��)Ҳ�(y��n)�C���O(sh��)Ӌ(j��)Ҫ��Č�(sh��)�F(xi��n)�� �D5-3 �����{(di��o)ԇ�D ���ڳ���y(c��)ԇ�ɹ�����@ʾ�����ṩ�˜�(zh��n)�_���@ʾ��(n��i)�ݡ����µø��N�@ʾ������Д�����g�ɹ���ֻ��(li��n)��Ӳ�������(y��n)�C�书�ܵĿ����ԡ� 5.3 ϵ�y(t��ng)(li��n)���{(di��o)ԇ���Y(ji��)����(j��ng)�^(gu��)Ӳ���{(di��o)ԇ��ܛ���{(di��o)ԇ���ų���Ӳ�����B�ӆ�(w��n)�}���(y��n)�C�˴��ڹ��ܵĿɌ�(sh��)�F(xi��n)�ԡ�����ܵ�ܛ��������ڴ˻��A(ch��)���{(di��o)ԇ�(y��n)�C�书�ܵ����_�ԡ�(li��n)���{(di��o)ԇ�ľ��w�������£� ��1������һ��(g��)���c(di��n)������@ʾ�����ٽY(ji��)��Ӳ���·�\(y��n)�С��@������Ŀ�����ڙz�y(c��)�������Ƿ��܉������\(y��n)�к��@ʾ���ĸ���(g��)LED���Ƿ��Гp�ġ��Y(ji��)���@ʾ�@ʾ����ֻ��߅�dz���һ��(g��)LED�������ģ���������߉�����\(y��n)�������� ��2�����o�B(t��i)�@ʾ�ӳ����c���N��(d��ng)�B(t��i)�@ʾ����Y(ji��)��Ӳ���·�M(j��n)���{(di��o)ԇ��ϵ�y(t��ng)�\(y��n)�Еr(sh��)�@ʾ��D5-1��ʾ���@ʾ�D����^����������(d��ng)�B(t��i)�@ʾЧ��Ҳ�܉�?q��)��F(xi��n)�����@ʾ���ڃɂ�(g��)��(w��n)�}��һ�ǰl(f��)���c(di��n)���·���(hu��)���F(xi��n)һ��(g��)���������c(di��n)��Ӱ������w���@ʾЧ��������ͬһ�е�LED�����c(di��n)���Ĕ�(sh��)���c�����ȳ����ȣ������ͬһ�еğ������c(di��n)���t���ȱ�ֻ�c(di��n)���ׂ�(g��)�r(sh��)Ҫ��һ�c(di��n)�� ��3��������ͨ�ţ��@ʾ��Ӳ��(li��n)���{(di��o)ԇ�������O(sh��)����ͨ�Ņf(xi��)�h������PC�C(j��)���Ƭ�C(j��)�l(f��)����ʼ������s�������ٰl(f��)��32���ص��@ʾ��(sh��)��(j��)�����l(f��)�Ϳ����@ʾ��ʽ���@ʾ�����֡��ٰl(f��)�Ͳ�ͬ���@ʾ��(sh��)��(j��)���@ʾ�����֣��^����N�@ʾ��ʽ���\(y��n)����r���N�@ʾ��ʽ֮�g���ГQ��r���Y(ji��)�����@ʾ����(zh��)���@ʾ����ָ��@ʾ���l(f��)�͵ă�(n��i)�ݡ� 5.4 �{(di��o)ԇ�Y(ji��)��������(du��)�{(di��o)ԇ�г��F(xi��n)�Ć�(w��n)�}�M(j��n)���˷������ó�����ԭ������k���� ��1��Ӳ���Ĺ������F(xi��n)������(w��n)������Ҫ�DZ��F(xi��n)��LED�@ʾ�����(q��)��(d��ng)�·���ֺ͆�Ƭ�C(j��)ϵ�y(t��ng)���֡����w���F(xi��n)���Ƭ�C(j��)��ؓ(f��)�d��늉�������ֵ1.7V���ң��o(w��)���M���g�a�·��ݔ��Ҫ���@ʾ�r(sh��)��(hu��)��һЩ���(q��)��(d��ng)��ݔ�������O(sh��)Ӌ(j��)ָ��(bi��o) ����(d��o)�����(q��)��(d��ng)����һ�����@ʾ���ϱ��F(xi��n)���x�����c(di��n)���܉�ܺÅ^(q��)�֣��D����F(xi��n)ģ������������@һ�F(xi��n)���ԭ��?y��n)飬���ӕr(sh��)���O��8550��˸ߜ�?f��)p�����¹�������(w��n)���ͺ��ӵ��·�����ο���߀�о���8550��e������늉��^(gu��)�ߡ����k���錢��Ƭ�C(j��)ݔ���˿����5K��������裬��Q�p�����O�ܡ� ��2��̓�c(di��n)�Įa(ch��n)���cܛ�������O��늉����P(gu��n)�����k���nj�ܛ���е��ӕr(sh��)�r(sh��)�g�{(di��o)��ǡ��(d��ng)ֵ����8550��e��늉�����3V���ҡ� ��(j��ng)�^(gu��)�{(di��o)ԇ���ģ�ϵ�y(t��ng)��(sh��)�F(xi��n)���}Ŀ��Ҫ�����Ӣ���@ʾ����(d��ng)�B(t��i)�@ʾ����λ�C(j��)ͨ���c���Ƶ�Ҫ��
�Y(ji��) Փ ��(j��ng)�^(gu��)һ�Εr(sh��)�g�Ĺ������K������˻���51��Ƭ�C(j��)��LED�@ʾϵ�y(t��ng)���O(sh��)Ӌ(j��)���(xi��ng)Ŀ��Ҫ��Ĺ���ȫ���_(d��)����ͨ�^(gu��)�@���O(sh��)Ӌ(j��)�ի@�H�࣬���H�������}Ŀ�漰����ܛӲ��֪�R(sh��)߀�и�����Ҫ�Č�(sh��)�H��(j��ng)�(y��n)���^(gu��)�������l(f��)�F(xi��n)�Ć�(w��n)�}�� �����}Ŀ֮��Ļ�(li��n)�W(w��ng)�ό�(du��)LED�M(j��n)����Ԕ��(x��)���Y���ռ����ļ��g(sh��)�ͮa(ch��n)�I(y��)�ăɷ��挦(du��)LED�M(j��n)�����˽⡣ͨ�^(gu��)�˽����J(r��n)�R(sh��)��LED��һ�T��(d��ng)��(y��ng)�÷dz��V���ļ��g(sh��)������(g��)�a(ch��n)�I(y��)ÿ�궼��(hu��)�о�Įa(ch��n)ֵ���Ҽ��g(sh��)߀�ڲ���l(f��)չ�̈́�(chu��ng)��[20]�� ���O(sh��)Ӌ(j��)֮���ʹ_���˅��մ���Ļ�@ʾ���Č�(sh��)�F(xi��n)�����͌�(sh��)�H��r�O(sh��)Ӌ(j��)һ��С��Ļ��LED�c(di��n)��@ʾ�����ڲ���˴����Ĵ���Ļ�@ʾ���Y�Ϻ�_�����}Ŀ���O(sh��)Ӌ(j��)����������(g��)�O(sh��)Ӌ(j��)����AT89S51�����Ŀ�������74LS164��74LS373�M���g�a�·�����O��8550��ULN2803���к����(q��)��(d��ng)���ڌ�(sh��)�F(xi��n)�@һ�O(sh��)Ӌ(j��)���^(gu��)�����������Ć�(w��n)�}�����y�o�������ˌ��F�Ľ�(j��ng)�(y��n)����̽�Ӗ(x��n)���@Щ��(j��ng)�(y��n)�ͽ�Ӗ(x��n)�ǣ� ��1���O(sh��)Ӌ(j��)֮ǰ��(y��ng)ԓ�M(j��n)�д������Y���ռ��ͷ������_��һ��(g��)�������O(sh��)Ӌ(j��)˼·�� ��2�������x��r(sh��)ҪԔ��(x��)��x����ʹ���փ�(c��)������Ҫ���]�����Ĺ��܌�(sh��)�F(xi��n)߀Ҫ���]����������(g��)ϵ�y(t��ng)�еļ����ԣ� ��3��Ӳ����ϵ�y(t��ng)�Ľ�����횺����ͷ�(w��n)������(sh��)�ィ��֮ǰ����M(j��n)�з����@�Ӳ��ܞ�ܛ���ṩһ��(g��)�ɿ���ԇ�(y��n)ƽ�_(t��i)�� ��4��ܛ���ľ�������Ҫ��(sh��)�F(xi��n)����߀Ҫ����ă�(y��u)������(ji��n)�������x�� �S���n�}���M(j��n)�У���(du��)LED���˽�ҲԽ��(l��i)Խ���롣�J(r��n)��L(zh��ng)ED���g(sh��)Ҳ��(hu��)�M(j��n)һ���l(f��)չ��LED��(y��ng)�Ì���(hu��)���ӏV���������O(sh��)������LED�ĸ߷�(w��n)���Ժ͵��ܺģ����c�o(w��)��ͨ�ż��g(sh��)��Y(ji��)����ɳĮ��̎�������E������ѩɽ֮�(sh��)��һ�K����̫�(y��ng)�ܳ�늣�ͨ�^(gu��)�o(w��)����ݔ��ʽ�����@ʾ��(n��i)�ݵ���Ϣ����ɽ���ṩָʾ�������Ϣ����ɳĮ��·����ָ������ �O(sh��)Ӌ(j��)�Y(ji��)���ˣ����W(xu��)��(x��)߀���^�m(x��)��������ͨ�^(gu��)�˴��O(sh��)Ӌ(j��)���õ���֪�R(sh��)���ĵá���(j��ng)�(y��n)?z��i)������ܶ��?hu��)�����Ժ������������˜\��
���x �@���܉�A�M��ɮ��I(y��)�O(sh��)Ӌ(j��)������Ҫ���x�ҵ�ָ��(d��o)�ώ�***�ώ���***�ώ���***�ώ������x����?c��)ڮ��I(y��)�O(sh��)Ӌ(j��)���g��(du��)�ҵ�ָ��(d��o)�����(l��)���Ͷ���(d��o)��ͬ�r(sh��)��Ҫ���x��W(xu��)��������^(gu��)���n�̵��ώ��������x������(du��)��֪�R(sh��)���L(zh��ng)�����������ڄڄ�(d��ng)�� ��߀Ҫ���xȫ��ͬ�W(xu��)�����x������W(xu��)�����������������˸Є�(d��ng)�ġ���Ĭ�ġ������ġ����Q�����顣�����ڵČ�(sh��)�(y��n)�ҵ�ͬ�W(xu��)����ҲҪ���x�ゃ���mȻ��ҁ�(l��i)�Բ�ͬ���I(y��)��̎�r(sh��)�gҲ���L(zh��ng)������ҹ�ͬ�Đ�(��i)����ͬ��Ŀ��(bi��o)ʹ�ô�һ�����ֹ�ͬŬ���� �����Ҫ���x����ס����Ĺ���T���̂������x������Փ������ȥ���o�҂��_(k��i)�T�҂�������¶���^��߀�ЌW(xu��)У�ı����͏N�����ゃ���Ұ�ȫ��ɮ��I(y��)�O(sh��)Ӌ(j��)�ı��ϡ�
��� 1�� Ӳ��ԭ��D  

��� 2�� �O(sh��)Ӌ(j��)����
- //��������Ҫ��������ӳ����ṩ�\(y��n)��ƽ�_(t��i)���ӳ���֞��@ʾ������Ч�@ʾ����//���Iݔ���Д��ӳ���
-
- //#include<reg51.h>
- //#include <absacc.h>
- //#include <intrins.h>
- #include<AT89x52.h>
- //#include<regx52.h>
-
- #define COUNT 34
- #define W 0X01
-
- unsigned char buffer[COUNT];
- unsigned char point;
-
- sbit A1=P1^0; //���x��һ�Ќ�(du��)��(y��ng)�˿�
- sbit A2=P1^1; // �ڶ���
- sbit A3=P1^4; // ��һ��
- sbit A4=P1^5; // �ڶ���
- sbit CLK_L=P1^2; //����λ�r(sh��)� �������|�l(f��)
- sbit CLEAR_L=P1^3; //���������λ ���ƽ��Ч
- sbit CLK_H=P1^6; //����λ�r(sh��)�
- sbit CLEAR_H=P1^7; // ���������λ ���ƽ��Ч
- sbit EN=P2^0;
-
- sbit P21=P2^1;
- sbit OE=P2^2; //���B(t��i)���S���ƶ� ���ƽ��Ч
- sbit LE=P2^3; //�i�����S��
-
-
-
- unsigned char code H1[16]={1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},H2[16]={0,0,0,0,0,0,0,0,1,0,0,0,0,0,0,0}; //�քe�����У�H���У�L����Ҫ�@ʾ�Ĕ�(sh��)��(j��)
- unsigned char L1,L2,i,command,k,j;
- char z,l,m,n,x;
- unsigned char data ziku[32];
- unsigned char idata sort[32];
- unsigned int data temp;
- unsigned char code Bmp019[]= //�o�B(t��i)�@ʾ��(n��i)��
- {
- /*----------------------------------------------------------
- Դ�ļ� / ���� : ��
- �����ߣ����أ�: 16��16
- ��ģ��ʽ/��С : ��ɫ�c(di��n)�Һ����ģ���v��ȡģ���ֹ�(ji��)����/32�ֹ�(ji��)
- ��(sh��)��(j��)�D(zhu��n)�Q���� : 2007-5-31 16:26:59
- ----------------------------------------------------------*/
- 0x00,0x22,0x22,0x2A,0x2A,0x2A,0x2F,0xFA,0x2A,0x2A,0x2A,0x2B,0x2A,0x2A,0x22,0x00,
- 0x04,0x04,0x08,0x10,0x20,0xC0,0x20,0x5C,0x48,0x42,0x41,0xFE,0x40,0x40,0x40,0x00
- };
-
- //*************************************************************
- //���������
- //���ܣ���PC�C(j��)���Ք�(sh��)��(j��)����(d��ng)���՝M34λ���յ��Ĕ�(sh��)��(j��)�l(f��)�ͻ�PC�C(j��)
- //*************************************************************
- com_interrupt(void)interrupt 4 using 3
- {
- unsigned char RECEIVR_buffer;
- if(RI==1)
- {
- RECEIVR_buffer=SBUF;
- RI=0;
- TI=0;
- if(point==0)
- { if(RECEIVR_buffer=='s')
- point++;
- else
- point=0;
- }
- if(point>0&&point<35)
- buffer[point++]=RECEIVR_buffer;
- else point=0;
- }
-
- //TI=0;
- if(point==35&&RI==0)
- {
- command=buffer[34];
- point=0;
- x=0;
- for(k=2;k<34;k++)
- {
- SBUF=buffer[k];
- sort[k-2]=buffer[k];
- while(TI==0);
- TI=0;
- }
- }
-
-
- }
-
- void delay(int k) //�ӕr(sh��)����
- {
- while(k--);
- }
-
- //**********************************************************************
- //�o�B(t��i)�@ʾ����
- //���ܣ����@ʾ��(sh��)��(j��)̎�����ƴ����D(zhu��n)�Q������ݔ������LED�@ʾ
- //**********************************************************************
- void display() //�@ʾ�ӳ���
- {
- EN=1;
- P21=1;
- CLEAR_L=0;
- delay(5);
- CLEAR_L=1;
-
-
- for(i=0;i<16;i++)
- {
- CLK_L=0;
- A1=H1[i];
- A2=H2[i];
- CLK_L=1;
-
- L1=ziku[i+z];
- L2=ziku[i+16+z];
- if(i+z<0||i+z>15)
- continue;
-
- OE=1;
- LE=1;
- if(L1==0x00 && L2==0x00)
- continue;
-
-
- for(j=0;j<8;j++)
- { CLK_H=0;
- if(L1&W==1)
- A3=0;
- else
- A3=1;
- if(L2&W==1)
- A4=0;
- else
- A4=1;
-
- CLK_H=1;
-
- L1>>=1;
- L2>>=1;
- }
- OE=0;
- LE=0;
- delay(110);
-
- CLEAR_H=0;
- delay(1);
- CLEAR_H=1;
- }
-
- }
-
- //�����@ʾ
- //���ܣ�ʹ��LED�a(ch��n)���������Ƶ�Ч��
-
-
- void sdisplay_left()
- { if(m==0)
- {
- z++;
- m=30;
- }
- if(z==15)
- {
- l=0;
- z=0;
- }
- display();
- m--;
- }
- //**********************************************************************
- //�����@ʾ
- //���ܣ�ʹ��LED�a(ch��n)���������Ƶ�Ч��
- //**********************************************************************
- void sdisplay_right( )
- {
-
- if(m==1)
- {
- z--;
- m=30;
- }
- if(z==-15)
- {
- l=0;
- z=0;
- }
- display();
- m--;
-
- }
- //**********************************************************************
- //�����@ʾ
- //���ܣ�ʹ��LED�a(ch��n)���������Ƶ�Ч��
- //**********************************************************************
-
- void sdisplay_up()
- { z=0;
- l=1;
- m=0;
- for(k=0;k<16;k++)
- {
- for(n=0;n<16;n++)
- {
- temp=ziku[n];
- temp<<=8;
- temp=temp|ziku[n+16];
- temp<<=1;
- ziku[n+16]=temp;
- temp>>=8;
- ziku[n]=temp;
- }
- do
- {
- display();
- m++;
- if(m==50)
- {
- l=0;
- m=0;
- }
- else l=1;
- }
- while(l);
- }
- }
- //**********************************************************************
- //�����@ʾ
- //���ܣ�ʹ��LED�a(ch��n)���������Ƶ�Ч��
- //**********************************************************************
- void sdisplay_down()
- { z=0;
- l=1;
- m=0;
- for(k=0;k<16;k++)
- {
- for(n=0;n<16;n++)
- {
- temp=ziku[n];
- temp<<=8;
- <font color="rgb(0, 0, 0)">��������
- ��������
- �����������ڱ���ƪ�� ���´��aՈ(q��ng)��51�����d������������</font>
������Word��ʽ�ęn51�����d��ַ��
 ����51��Ƭ�C(j��)��LED�c(di��n)��@ʾ��ϵ�y(t��ng)���O(sh��)Ӌ(j��)�c��(sh��)�F(xi��n).doc
(8.96 MB, ���d��(sh��): 64)
����51��Ƭ�C(j��)��LED�c(di��n)��@ʾ��ϵ�y(t��ng)���O(sh��)Ӌ(j��)�c��(sh��)�F(xi��n).doc
(8.96 MB, ���d��(sh��): 64)
2018-4-26 14:36 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5
| 




 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664








 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��