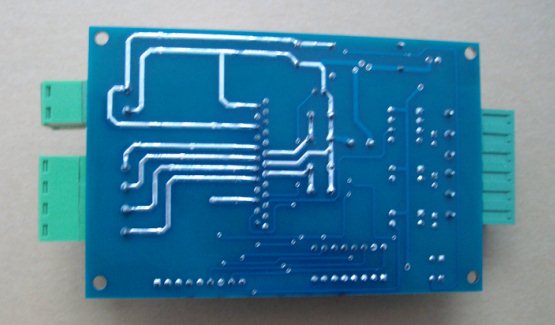
Altium Designer畫的THB6064步進電機驅動模塊的電路原理圖和PCB圖如下:(51hei附件中可下載工程文件)

0.png (54.8 KB, 下載次數: 81)
下載附件
2018-2-20 18:01 上傳
0.png (77.54 KB, 下載次數: 61)
下載附件
2018-2-20 18:02 上傳
0.png (46.61 KB, 下載次數: 59)
下載附件
2018-2-20 18:02 上傳
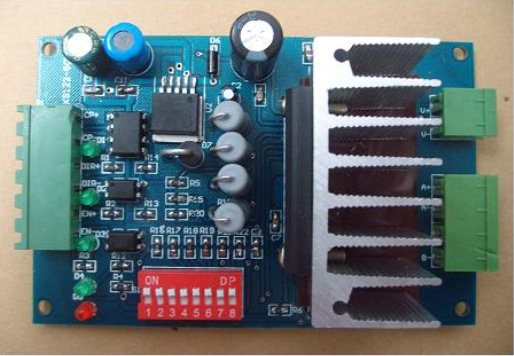
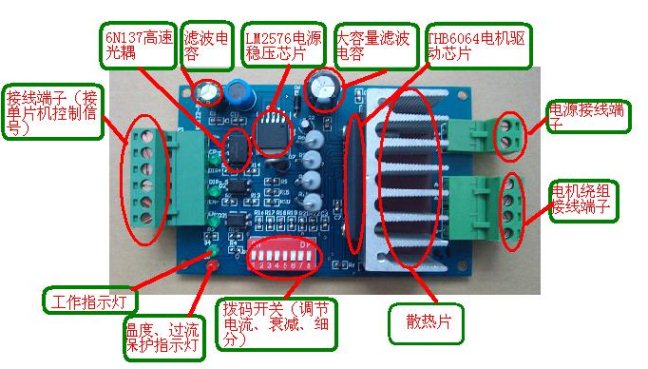
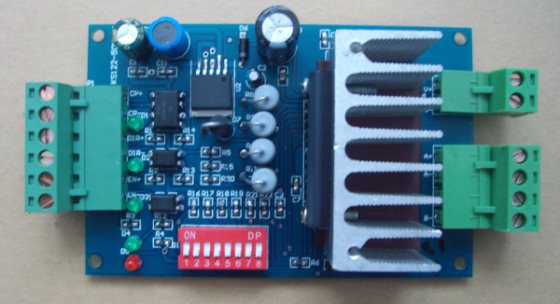
THB6064芯片與單片機控制的大功率、高細分兩相混合式步進電機驅動模塊的實物圖如下:
【標注圖片】
【步進電機控制接線圖】 用戶可根據需要采用共陽極接法或者共陰極接法。 - 共陽極接法:分別將脈沖+、方向+、使能+連接在一起,連接到控制系統的電源上,如果此電源是+5伏,可直接接入,如果此電源大于+5伏,則需外部另加限流電阻R,保證給驅動器內部光耦提供8—15mA的驅動電流。輸入信號低電平有效。
- 共陰極接法:分別將脈沖-、方向-、使能-,連接到控制系統的地端(SGND,與電源地隔離),輸入信號高電平有效。限流電阻同上
撥碼開關作用: 電機細分設定: (撥碼開關常態均為低電平,接通為高電平。) 電流衰減設定: 工作電流設定:
實物圖片:
單片機步進電機調試源程序如下:
- ////////////////////////匯誠科技////////////////////
- ///////////////////步進電機調試程序/////////////////
- #include<reg52.h>
- #define uchar unsigned char
- #define uint unsigned int
- /********************************************************
- 控制位定義
- ********************************************************/
- sbit shi_neng=P1^0; // 使能控制位
- sbit fang_xiang=P1^1;// 旋轉方向控制位
- sbit mai_chong=P1^2; // 脈沖控制位
- /********************************************************
- 延時函數
- ********************************************************/
- void delay(uint i)//延時函數
- {
- uchar j,k;
- for(j=0;j<i;j++)
- for(k=0;k<50;k++);
- }
- /********************************************************
- 主函數
- ********************************************************/
- main()
- {
- shi_neng=0; // 使能控制位
- fang_xiang=0;// 旋轉方向控制位
- mai_chong=0; // 脈沖控制位
-
- while(1)
- {
- mai_chong=~mai_chong; //輸出時鐘脈沖
- delay(5); //延時 (括號內數值越小,電機轉動速度越快)
-
- }
- }
- ////////////////////////匯誠科技////////////////////
- #include<reg52.h>
- #define uchar unsigned char
- #define uint unsigned int
- /********************************************************
- 控制位定義
- ********************************************************/
- sbit shi_neng=P1^0; // 使能控制位
- sbit fang_xiang=P1^1;// 旋轉方向控制位
- sbit mai_chong=P1^2; // 脈沖控制位
- sbit qi_dong=P2^0;// 啟動按鈕
- sbit ting_zhi=P2^1;//停止按鈕
- sbit zheng_zhuan=P2^2;//正轉按鈕
- sbit fan_zhuan=P2^3;// 反轉按鈕
- /********************************************************
- 延時函數
- ********************************************************/
- void delay(uint i)//延時函數
- {
- uchar j,k;
- for(j=0;j<i;j++)
- for(k=0;k<50;k++);
- }
- /********************************************************
- 主函數
- ********************************************************/
- main()
- {
- shi_neng=1; // 使能控制位
- fang_xiang=0;// 旋轉方向控制位
- mai_chong=0; // 脈沖控制位
-
- while(1)
- {
- mai_chong=~mai_chong; //輸出時鐘脈沖
- delay(5); //延時 (括號內數值越小,電機轉動速度越快)
- if(qi_dong==0) shi_neng=0; //啟動按鈕
- if(zheng_zhuan==0) fang_xiang=0;//正轉按鈕
- if(fan_zhuan==0) fang_xiang=1;// 反轉
- if(ting_zhi==0) shi_neng=1;//停止
- }
- }
【簡要說明】
一、 尺寸:長100mm、寬60mm、高30mm.
二、 主要芯片:THB6064、LM2576.
三、 雙全橋MOSFET驅動,低導通電阻Ron=0.4Ω(上橋+下橋)
四、 高耐壓42V,大電流4.5A(峰值,實際應用中不超過40V,4A)
五、 工作電壓:控制信號直流4.5~5.5V;
六、 自動半流鎖定功能
七、 衰減方式連續可調
八、 細分設定:(1、1/2、1\8、1\10、1/16、1\20、1\32、1/40、1\64)
九、特點:
1、具有電源指示、過流保護指示。
2、轉速可調、工作方式,工作電流、衰減方式均可通過撥碼開關調節
3、抗干擾能力強
4、具有溫度保護和過電流保護
5、可單獨控制多種規格的兩相混合式步進電機
6、可實現最大功率160W
適用場合:單片機學習、電子競賽、產品開發、畢業設計。。。
全套設計資料51hei下載地址:
| 



 [復制鏈接]
[復制鏈接]











 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩
 ,麻煩了~
,麻煩了~

