Altium Designer����L6203ֱ��늙C(j��)�����(q��)�����·ԭ��D��PCB�D���£�(51hei�����п����d�����ļ�)

0.png (55.74 KB, ���d��(sh��): 59)
���d����
2018-2-20 03:13 �ς�
0.png (29.15 KB, ���d��(sh��): 53)
���d����
2018-2-20 03:13 �ς�
0.png (51.75 KB, ���d��(sh��): 54)
���d����
2018-2-20 03:14 �ς�
L6203ģ�K�Č���D��
image001.png (437.8 KB, ���d��(sh��): 47)
���d����
2018-2-19 02:08 �ς�
��ģ�K�ĺ�Ҫ�f���� һ���ߴ磺�L66mmX��33mmX��28mm
������ҪоƬ��L6203
��������늉���������ֱ̖��4.5~5.5V;�(q��)��늙C(j��)늉�7.2~30V
�ġ����(q��)��ֱ����7.2~30V֮�g늉���늙C(j��)��
�塢���ݔ�����4A
�������ݔ������20W
�ߡ����c(di��n)��1��������ָ̖ʾ
2���D(zhu��n)�ٿ��{(di��o)
3�����ɔ_������(qi��ng)
4�������m(x��)�����o(h��)
5���ɆΪ�(d��)����һ�_ֱ��늙C(j��)
6��PWM�}��ƽ���{(di��o)�٣���ʹ��PWM��̖��ֱ��늙C(j��)�{(di��o)�٣�
7���Ɍ��F(xi��n)�����D(zhu��n)
8�����(q��)�����dz��r������w˼��������܇���(q��)��������С��������(q��)��������(qi��ng)�� ����(bi��o)ע�DƬ��
image003.png (419.24 KB, ���d��(sh��): 50)
���d����
2018-2-19 02:08 �ς�
image004.jpg (29.36 KB, ���d��(sh��): 50)
���d����
2018-2-19 02:08 �ς�
ֱ��늙C(j��)�Ŀ��ƌ��� ʹ���(q��)�������Կ���һ�_ֱ��늙C(j��)��늙C(j��)�քe��OUT1��OUT2��ݔ���EN������ݔ��PWM�}���{(di��o)����̖��늙C(j��)�M(j��n)���{(di��o)�ٿ��ơ�������o��{(di��o)�ٿɌ�ENʹ�ܶˣ��Ӹߵ��ƽ�����ƽ���ӣ����ƽֹͣ��Ҳ���Ɇ�Ƭ�C(j��)ݔ��ֱ�ӿ��ƣ����F(xi��n)늙C(j��)�����D(zhu��n)�������ˣ�ݔ����̖��IN1�Ӹ��ƽݔ���IN2�ӵ��ƽ��늙C(j��)���D(zhu��n)���������̖��IN1�ӵ��ƽ�� IN2�Ӹ��ƽ��늙C(j��)���D(zhu��n)�����Ʌ����D����
ֱ��늙C(j��)�yԇ���� ��ԭ��D��

���yԇ���� - /********************************************************************
- ���F(xi��n)����:�{(di��o)ԇ����
- ʹ��оƬ��AT89S52 ���� STC89C52
- ����11.0592MHZ
- ���g�h(hu��n)����Keil
- ���ߣ�zhangxinchun �R�\�Ƽ�
- *********************************************************************/
- #include<reg52.h>
- #define uchar unsigned char//�궨�x�o��̖�ַ���
- #define uint unsigned int //�궨�x�o��̖����
- sbit P2_0=P2^0;//����
- sbit P2_1=P2^1;//ֹͣ
- sbit P2_2=P2^2;//���D(zhu��n)
- sbit P2_3=P2^3;//���D(zhu��n)
- sbit P1_0=P1^0;//ʹ��
- sbit P1_1=P1^1;//IN1
- sbit P1_2=P1^2;//IN2
- /********************************************************************
- �ӕr����(sh��)
- *********************************************************************/
- void delay(uchar t)//�ӕr����
- {
- uchar m,n,s;
- for(m=t;m>0;m--)
- for(n=20;n>0;n--)
- for(s=248;s>0;s--);
- }
- /********************************************************************
- ������(sh��)
- *********************************************************************/
- main()
- {
- while(1)
- {
- if(P2_0==0){delay(3);if(P2_0==0)//����
- {
- P1_0=1;
- P1_1=1;
- P1_2=0;
- }}
- if(P2_1==0){delay(3);if(P2_1==0)//ֹͣ
- {
- P1_0=0;
- }}
- if(P2_2==0){delay(3);if(P2_2==0)//���D(zhu��n)
- {
- P1_1=1;
- P1_2=0;
- }}
- if(P2_3==0){delay(3);if(P2_3==0)//���D(zhu��n)
- {
- P1_1=0;
- P1_2=0;
- }}
- }
- }
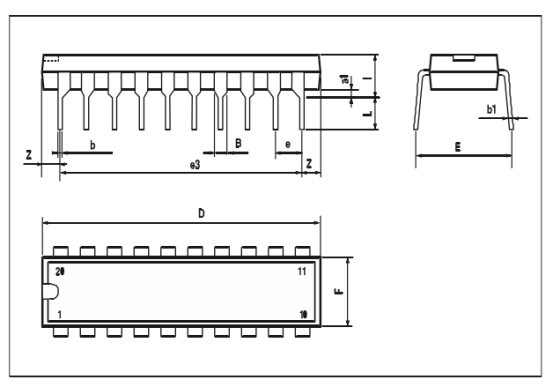
L6203 DMOS(�����ͽ���������댧(d��o)�w)ȫ�ؘ��(q��)����
- ���늉���48V
- ����ֵ���5A��L6021���2A��
- �����Чֵ��
- L6201: 1A; L6202: 1.5A; L6203/L6201PS: 4A
- RDS (ON) ���ֵ 0.3 (�Ҝ� 25 C)
- ����늉����o(h��)
- ����TTL�·
- �\(y��n)������l��100KHz
- ���
- ����߉�·ʹ��
- ��Ч
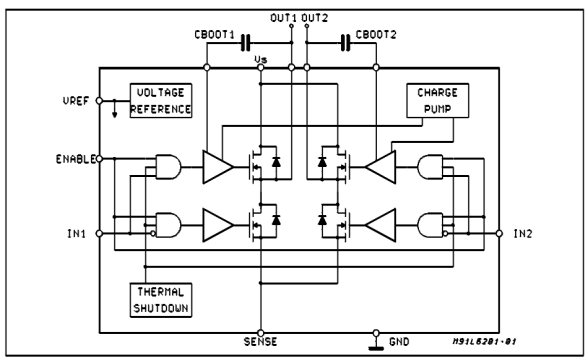
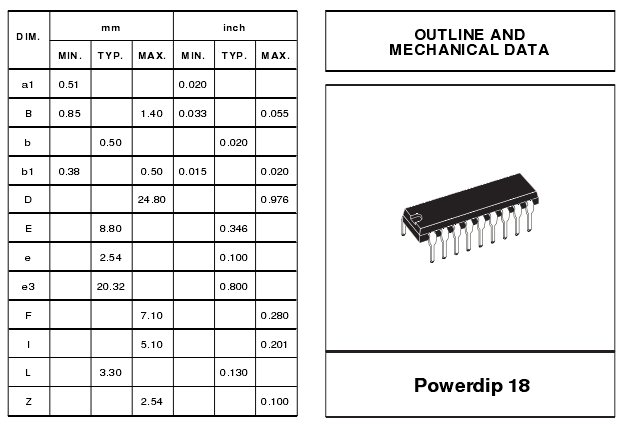
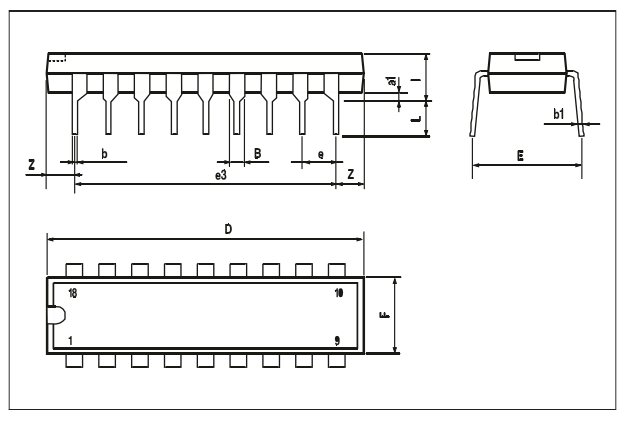
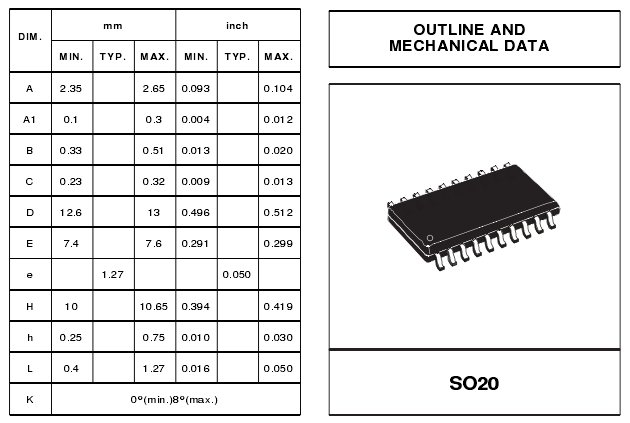
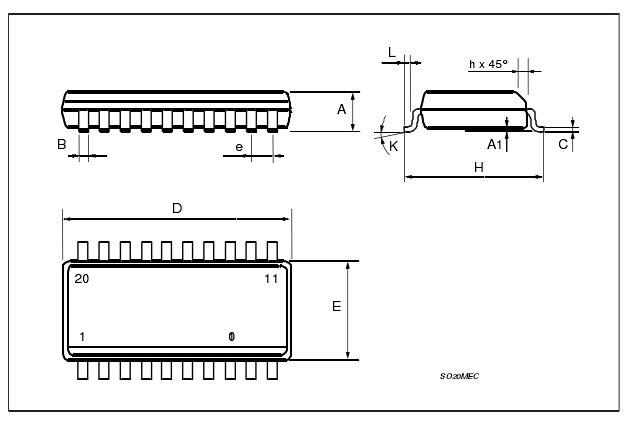
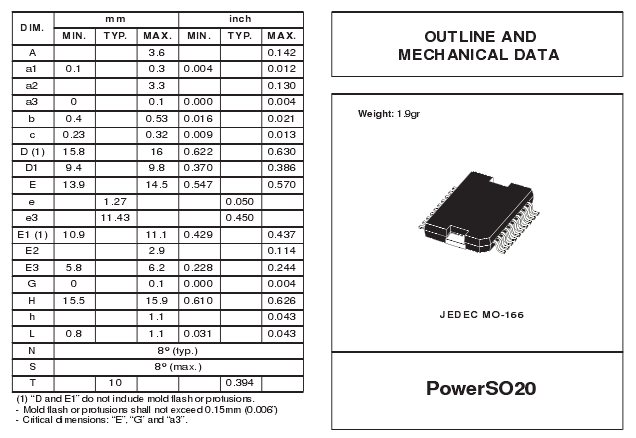
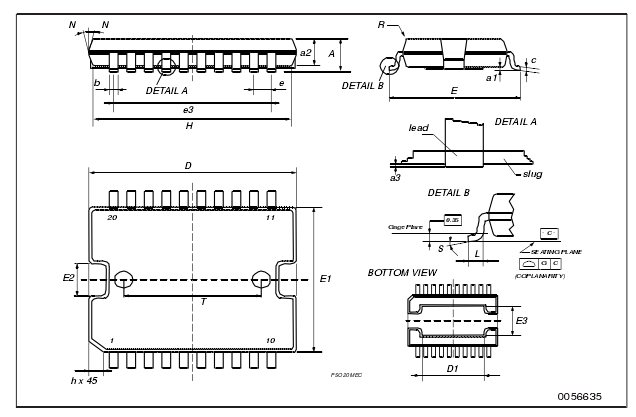
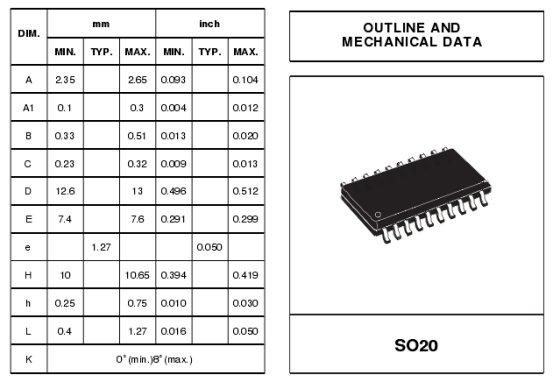
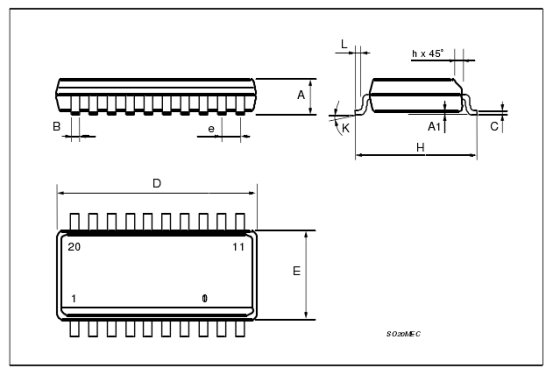
���� L6201��һ�N��(y��ng)�ö�ԴBCD(Bipolar,CMOS,DMOS)���g(sh��)������늙C(j��)��ȫ�ؘ��(q��)����оƬ���@�NоƬ�܌���(d��)����DMOS��Ч��(y��ng)���w�ܺ�CMOS�Լ����O�ܼ�����һ�KоƬ�ϡ�����ʹ��ģ�K���U(ku��)չ���g(sh��)��L6201���Ԍ��F(xi��n)߉�·�����ʼ��ă�(y��u)����DMOS��Ч��(y��ng)������42V��늉����\(y��n)�У�ͬ�r�߂��Ч�����ٵ��ГQ���ܡ��������е�TTL, CMOS andCݔ�롣ÿ����(d��)����߉ݔ���ܿ���һ���ϵ�(���)����������ʹ�ܶ˿��Կ��ƃɂ��ϵ���L6201����3�в�ͬ�ķ��b��̖�� ���(sh��)��(j��)�� L6201(SO20�����NƬ) L6201PS(PowerSO20) L6202(�p��ֱ����b18���_) L6203(Multiwatt���b) |
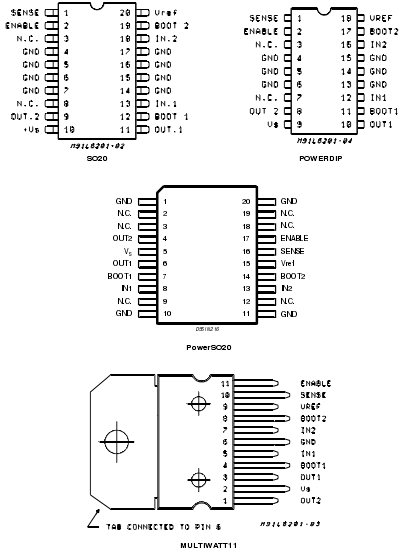
�Y(ji��)��(g��u)�D ���_�B�ӈD����ҕ��
���_���� | | | | | | | | | | | | �����裬�ṩ늙C(j��)����������� | | | | | | ���ƽ��Ч���x��IN1����IN2�ӿ� | | | |
| | | | | | | | | | | | | | | | | | | | | |
| | | | | | | | | | | | | | | | | | | | | | | | | | | ���_������e��݁��_����һ��DMOS��Ч��(y��ng)����Ч | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | ���_�����݁��_����һ��DMOS��Ч��(y��ng)����Ч | | | | | | ��(n��i)�Å���늉���ͨ�^��ݳ�늡����Ѓ�(n��i)����裬����Դݔ��2mA |
�^������~��ֵ | | | | | | | | | ��ͬ��ݔ���˵�늉�����Out1��Out2֮�g��60V | | | | | | | | �}�_ݔ����� ����L6201PS/L6202/L6203��ע1�� �C�o�؏�(f��) ���� L6201 ����6201PS/L6202/L6203 ֱ��ݔ����� ����L6201 (ע1) | | | | | | | | Boostrap Peak Voltage ���e��ݷ�ֵ늉� | | | | ������ Tpins = 90��C ���� L6201 ���� L6202 Tcase = 90��C ���� L6201PS/L6203 Tamb = 70��C ���� L6201 (ע2) ���� L6202 (ע2) ���� L6201PS/L6203 (ע2) | | | | | | |
ע1���}�_���ȃH�ܹ�(ji��)�c(di��n)��늟��迹��Ӱ푣�ԔҊ����������(sh��)���� ע2��������С��e���~Ƭ
����������(sh��) | | | | | | | | Rthj-pins Rthj-case Rthj-amb | ��(ji��)�c(di��n)���_��� max ���ֵ ��(ji��)�c(di��n)��(n��i)���� max. ���ֵ ��(ji��)�c(di��n)����� max. ���ֵ | | | | | |
��*�����b�X�ƻ�Ƭ�·��
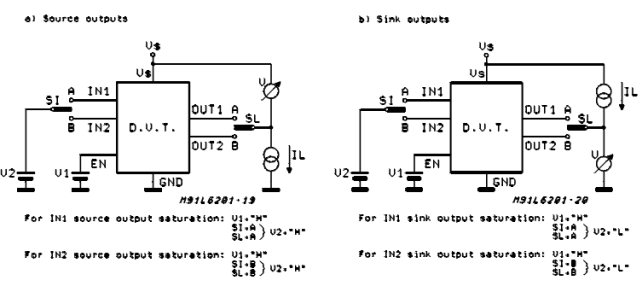
늚��������yԇ�·����(sh��)���ض�=25C ,��늉�42V������늉�0V���o�e������Ҫ�� | | | | | | | | |
| | | | | | | |
| |
| | | |
|
|
| | | | | EN = H VIN = L EN = H VIN = H IL = 0 EN = L ( �D. 1,2,3) |
| | | | | |
|
| | | | | |
|
| |
| | | |
|
| |
| |
���w�� | | | |
|
| | | | |
|
|
| | | | | | �D��9 IDS=1A L6201 IDS=1.2A L6202 IDS=3A L6201PS/03 |
| |
| | | |
| |
| | |
���O��Դ�O��©�O | | |
| |
| | | | IF=1A L6201 IF=1.2A L6202 IF=3A L6203 |
| |
| | | |
|
| |
| |
߉�ƽ
늚����ԣ��m(x��)�� оƬ����߉�r�� | | | | | | | | | |
| |
| | | | |
| |
| | | | |
| |
| | | | |
| |
| | | ��������P(gu��n)�����t�r�g | |
| |
| | | | |
| |
| | | | |
| |
| | | | |
| |
| |
��*�������ڹ��� ��**����ͬ�������еģ�L6202//03��VSD������D4��ʾ;һ��L6201��늉�ֵ��0.3V
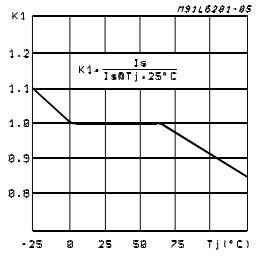
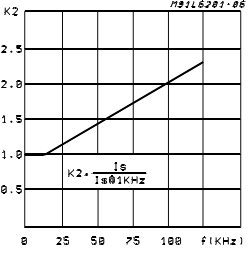
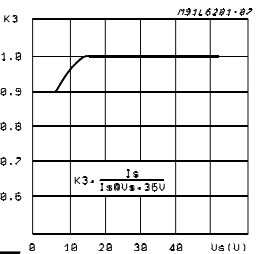
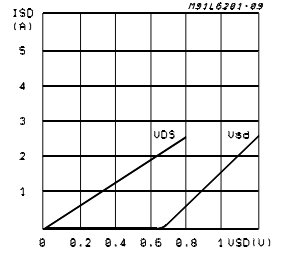
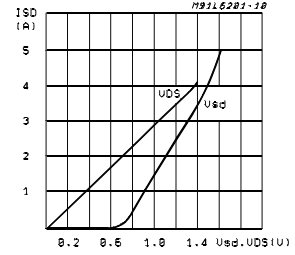
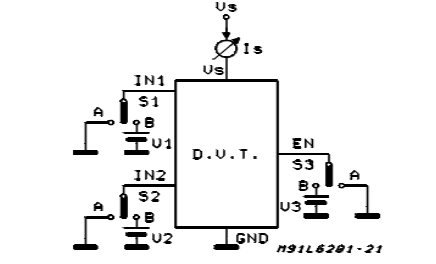
�D1�����ͺ�Tj��ʾ��D �D2�������o�B(t��i)������l�ʵ�ʾ��D �D3������Is��Vs��ʾ��D �D4������Rds��Vref��ʾ��D��Vref��Vs��Vref��
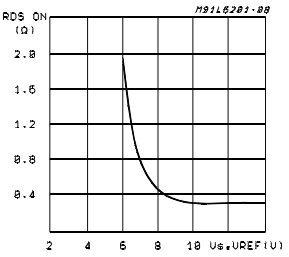
�D5��������B(t��i)��25��C��Rds����ֹ�c�ض�׃����ʾ��D
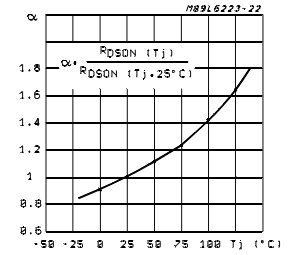
�D6��a����ͬ�������¶��O�ܵĠ�B(t��i)��L6201�� �D6��b����ͬ�������¶��O�ܵĠ�B(t��i)��L6201PS/02/03��
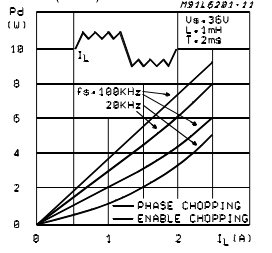
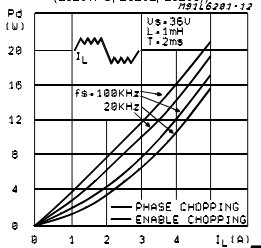
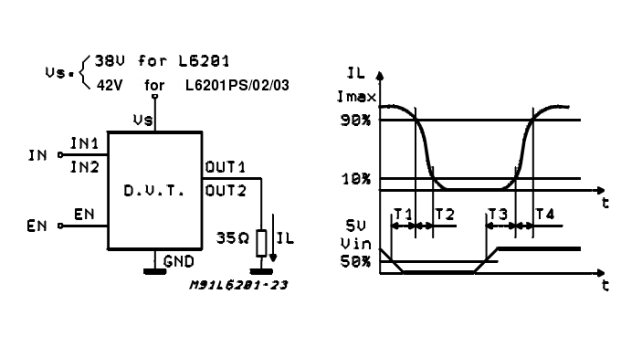
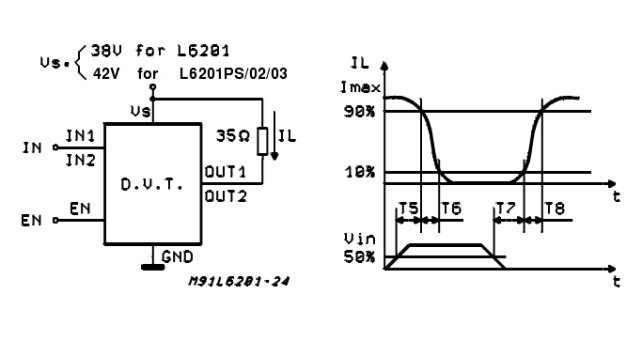
�D7��a�����������cIL��ʾ��D��L6201�� �D7��b�����������cIL��ʾ��D��L6201PS/02/03��
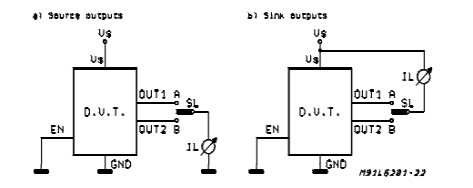
�D8��a���������ز�
�D8��b������헔ز�
�D8��c����ʹ�ܶ˔ز�
�yԇ�· �D9���늉� �D10���o�B(t��i)��� �D11��©���ʾ��D �D12��Դ������t�r�g��ݔ��ز�ʾ��D �D13����ƫ������t�r�g���ز� �·����
L6201/1PS/2/3��һ�N��(y��ng)�ö�ԴBCD(Bipolar,CMOS,DMOS)���g(sh��)������늙C(j��)�ГQ�(q��)�ӵ����Kȫ��оƬ����ԴBCD���g(sh��)�Ǽ��ɶ������߆Ϊ�(d��)��DMOS��Ч��(y��ng)���w�ܣ�����߀���MOS��/���O�ܵĿ����·��ͨ�^ʹ���@�N���g(sh��)ʹ���@�оƬ�߂��������TTL,COMS��C���ҿ��������ⲿMOS�O(sh��)����(q��)�ӆ��}��߉�(q��)�ӈD���1��ʾ��
��1 | | | | | | | Sink1��Sink2 Sink1,Source2 Source1,Sink2 Source1.Source2 | | | | ���Ј�Ч��(y��ng)���P(gu��n)�� |
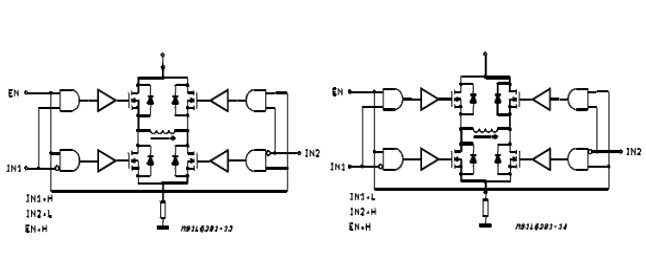
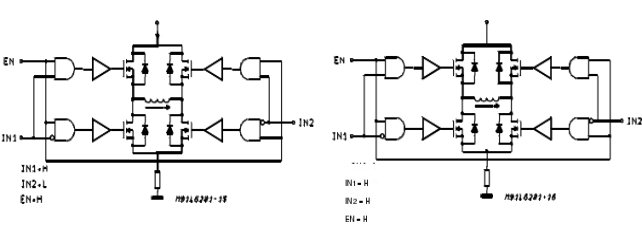
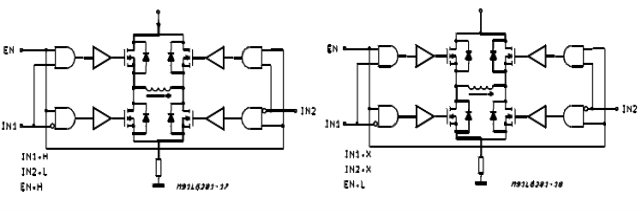
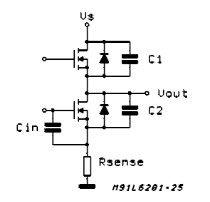
L��ʾ���ƽ H��ʾ���ƽ X��ʾ�����B(t��i) (*)INPUT1��INPUT2�ǿ������Ĕ�(sh��)��ݔ���� �mȻL6201/1PS/2/3�@�оƬ�ܱ��C����������r�İl(f��)�������Dz��ܱ�������DMOS�����ö��O�ܵă�(n��i)���Y(ji��)��(g��u)������ď�(qi��ng)����a(ch��n)���ęz�y�������@�N�F(xi��n)��Įa(ch��n)����Ҫ�������c��(ji��)�c(di��n)�M�ϵ�C1��C2�ɂ���ݳ��늣���D14������(d��ng)ݔ���и��ƽ����ƽ�D(zhu��n)�Q�ĕr��һ�ɵļ�����ע�����C1���ڵ��ƽ����ƽ�D(zhu��n)�����^����ͬ����һ�ɴ�ļ�����ע�����C2���ײ�DMOS��Ч��(y��ng)�ܵ�ݔ����ݵij�늌�(d��o)���ڼ�����֮ǰ��늘O�Ե���׃����D15���� �D14.DMOS��Ч��(y��ng)�ܵă�(n��i)���Y(ji��)��(g��u) �D15.�ڙz�y���_�ļ�������ʾ��D ���w�ܵ��\(y��n)�D(zhu��n) ��(d��o)ͨ��B(t��i) ��(d��ng)DMOS������һ��̎�ڵ�ͨ�Ġ�B(t��i)����ô�����f���RDS(ON)ʼ�K̎���ܲٿصķ������ڴ����g�Ĺ��ĵı��_(d��)ʽ�� PON = RDS (ON) IDS2 (RMS) ��ԴBCD�^�̵ĵ���B(t��i)���RDS(ON) �ڵ��ĵ���r�x���ṩ�����
�P(gu��n)���B(t��i) ��(d��ng)DOMS������һ���P(gu��n)��ĕr����ôVDS��늉�����늉�Դ��늉���ͬ�rֻ��©���IDSS���ڡ����g�Ĺ��������µĹ�ʽ�� POFF = VS IDSS �˕r�Ĺ���ʮ�ֵͣ��^��(d��o)ͨ�r��Ĺ����ǿ��Ա����Ե�
���w�� �����l(f��)�F(xi��n)�������ľ��w�ܵ�Դ�O�͜ϵ��g��(n��i)�ö��O�ܣ����O���\(y��n)����һ�N���٣����ⷽ����ГQģʽ�����´�ѭ�h(hu��n)֮ǰ��ʹ�ܶ�̎���c���ƽ�Ġ�B(t��i)��늉����������(RDS (ON))���(ID)�ij˷eֱ���_(d��)�����O�ܵ�����ƫ��늉�����(d��ng)ʹ�ܶ��ǵ��ƽ�r����Ч��(y��ng)���P(gu��n)�࣬ͬ�r�������ʩ���ڶ��O�ܡ��ڷ���(f��)ѭ�h(hu��n)���^�ɕr�ڵĹ���ȡ�Q��늉�������IJ����Լ��(q��)�ӷ�ʽ����D7(a),(b),�D8(a)��(b),(c)�� Ptrans. = IDS (t) VDS (t)
���e���
ֻ�����е�N�ϵ���10V�ĖŘO늉��²��܉�_��DMOS���w�ܵ����_�(q��)�ӡ����ڵײ��Ľӵؾ��w�܁��f�������C���������ϲ��ľ��w���@Ȼ��Ҫһ�����ߵ��(q��)��늉�����(d��ng)�_(d��)����(n��i)�ó��������_(d��)����ֵ�ĕr���ܽY(ji��)�����e������_�(q��)�ӡ����˳���܉���Ч���M(j��n)�У����e��ݵ�ֵ��(y��ng)��(d��ng)����1nF�ľ��w�ܵ�ݔ����ݡ������Ծ����������10nF�ġ�����Ծ���ݵ�ȡֵ�^С��������Ч��(y��ng)�ܵij�늲���֣�����(d��o)��RDS (ON)�ʸ���B(t��i)����һ������f���ʹ��һ�����ݿ��������ô�ڙz�y����ϕ��a(ch��n)����������
����늉� ����һ����(n��i)�������迹��늉����·���f����(y��ng)ԓ�����_�ͽӵض˷���һ����ݡ��ݿ���0.22 F��������ԝM��l�������_���Ա�����2mA��������������Ա�횼��Ա��o(h��)��
���^(q��)�r�g ���˱��o(h��)����е�ͬ����������܉��܉��·���������оƬ�ṩ���L��40ns�����^(q��)�r�g
�����ı��o(h��) �ᱣ�o(h��)�·�DZ�횾߂�ģ�һ���ڹ�(ji��)�c(di��n)�ض��_(d��)��150�z�϶ȵĕr����ô����ʧЧ�ˡ�ֻ�Ю�(d��ng)�ضȽ�����ȫ�ķ���֮��(n��i)�������(q��)������ݔ���ʹ����̖���ܱ����ơ�
��(y��ng)����Ϣ ѭ�h(hu��n)�· ʹ�ܶ��ø��ƽ�r���·��ѭ�h(hu��n)�ġ����w�ܵ�늉�������ͨ�^RDS(ON)IL�ij˷e��ʾ��늉����Ĵ�Сȡ�Q��ɺԴ�O�Ķ��O�����ԡ��mȻ�(q��)�����܂���(d��o)�ı��o(h��)��������߀���܉�ͨ�^��(n��i)�õ�ɺԴ����ݵij��늬F(xi��n)���_(d��)�z�y���_�ˡ���ô���@�ӵ�һ���O(sh��)���У��@���������κεĆ��}�ģ����z�y����܉���ܵ�늉��DZ��O(sh��)Ӌ�õġ�
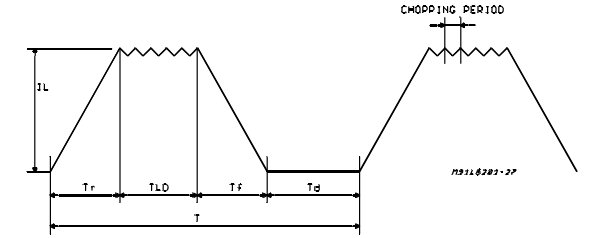
�����r�gTr(��D16.) ��늘�Č�����ϵ���ݽ�(j��ng)�����r�g����_(d��)�����ֵ���IL�r���˕r���������_(d��)ʽ�� EOFF/ON = [RDS (ON)IL2Tr] 2/3
ؓ(f��)�d�r�gTLD(��D16) �ڴ����g�Ĺ�����Ҫ�������Ҳ�����(c��)�Ĺ��ʽM�ɣ�������ĵĹ��ʣ� ELD = IL2 RDS (ON)2 Tؓ(f��)�d �����(c��)�Ĺ��ʣ� E���� = VSILTCOMfSWITCHTؓ(f��)�d ���У������(c��)��Ӌ��r�g���ڌ�(d��o)ͨ���P(gu��n)��ĕr�g���x���l�ʵ��ڔز��l��
�������r�g�����ƌ�(d��o)���½��r�g��(y��ng)ԓ����ƵĹ�ʽ�� EON/OFF = [RDS (ON)IL2 Tf] 2/3 �o�B(t��i)���� �(q��)�����ܺĵ����M�ɲ������o�B(t��i)���ģ���ʽ���£� E�o�B(t��i) = I�o�B(t��i) Vs T
�D16
һ�����ڃ�(n��i)���ܺ� ETOT = EOFF/ON + Eؓ(f��)�d + E���� + EON/OFF + E�o�B(t��i) �����ĵ�Ӌ���е�׃����̖���x�� ���ĵ����ܳ������ڕr�g Tr��ʾ �����r�g TLD��ʾ ؓ(f��)�d�(q��)�ӕr�g Tf ��ʾ�½��r�g Td��ʾ ���^(q��)�r�g T ��ʾһ���r�g�� T = Tr + TLD + Tf + Td
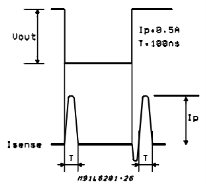
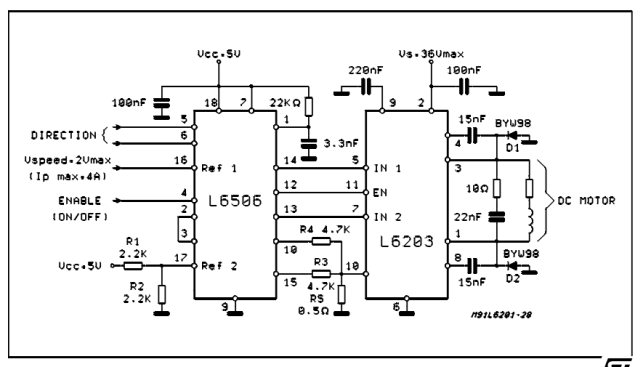
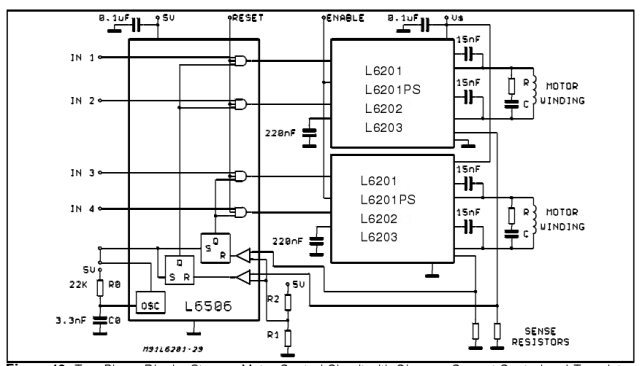
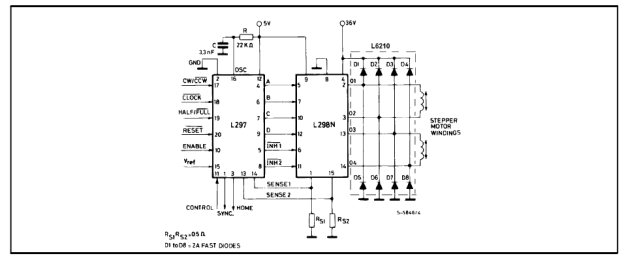
ֱ��늙C(j��)�ٶȿ��� L6201/1PS/2/3�ԏ������Hȫ��ķ��bоƬ�ͱ�����ֱ��늙C(j��)�Ŀ��ơ���Ҫ����ֱ��늙C(j��)�ٶȺͷ���Ĺ��ʼ��Ŀ��ơ���D17��ʾ��L6201/1PS/2/3�܉��(q��)����L6506���\(y��n)�ÿ猧(d��o)�Ŵ�������������������@��һ�����H�ĽM�B(t��i)�·���У�L6506ֻ��һ��Ľ�چh�õ�����һ������Á��(q��)�ӵڶ��_늙C(j��)��L6506�ęz�y����ϵ�������R��������܉�z�y�����^늙C(j��)���{(di��o)�ټ��Ƅӵ�늉�����L6506�ăɂ��z�y�˶����������RS�����L6506��ݔ����L6203��ݔ��֮�g���B���^�L��Ԓ����ô��L6203��ݔ��˼��ӵض˶�Ҫ����衣��ݔ����߀��(y��ng)ԓ����RC��������ͬ����̖��BYW98�Ķ��O��Ҳ�������B���Դ����˺ͽӵض�֮�g�����µĹ�ʽ�����Á�Ӌ�㱣�����Ĕ�(sh��)ֵ�� R VS/lp C = lp/(dV/dt) ���У�VS��Դ늉������ֵ��IP��ؓ(f��)�d��ֵ�����dv/dt�����������r�g��ݔ��늉�(һ����V/s)������Դ�]�Г���������o(h��)����ôһ���m��(d��ng)��һ�c(di��n)����ݿ��������B����L6203�Ĺ�늶����_����17̖���_������܉�ʹ��оƬ���õĹ�����늙C(j��)�ĵ�����Ͼ���2A��L6202������ͬ�������24V��늙C(j��)��
�D17���p��늙C(j��)����
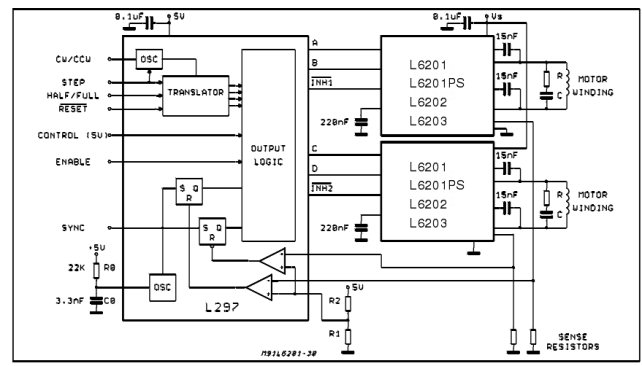
�p�O�M(j��n)늙C(j��) �p�O���M(j��n)����һƬL6506����L297���@�ɷNBCDȫ���(q��)������������һЩ�ⲿ�O(sh��)�䡣�C���������NоƬ���ܽM��һ��������̎�����·�ӿڡ���D18��19��ʾ����������ֱ���B�Ӄ�BCD�(q��)�Ә��ⲿ�U(ku��)չ�O(sh��)���õ�������С�����·:һ���ز��l���·��RC�W(w��ng)�j(lu��)�����(R1; R2)�M�ɵı��^���(q��)�ӣ�����늉��ͱ���늉���������ݵĴ�(li��n)��(ԔҊֱ��늙C(j��)���ٶȿ���)
�D18�������p�O���M(j��n)늙C(j��)�ز������·
�D19�������p�O���M(j��n)늙C(j��)�ز������w�ܿ����·
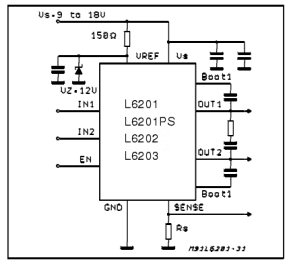
�(q��)��늙C(j��)����С늉����Ե���Ҏ(gu��)�������12V��늉�(ԔҊ늚����Ա�)����ˣ��������@��һ�����O(sh��)���m��(d��ng)�p�����R DS (ON)����ֵ���Ķ��p�����һ���Ĺ��늉����ĈD20���Կ�����
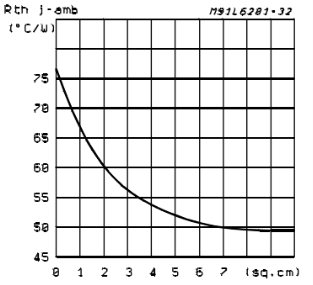
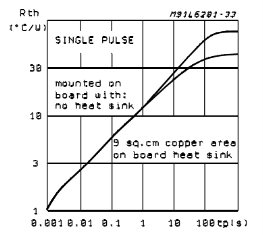
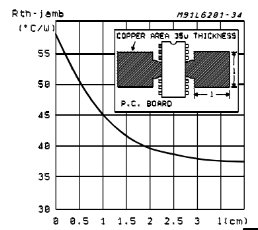
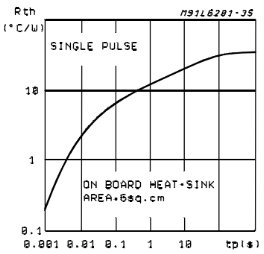
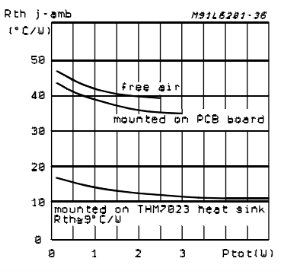
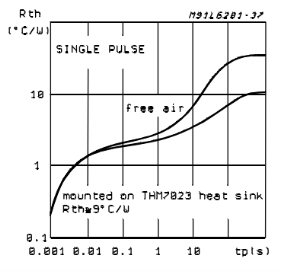
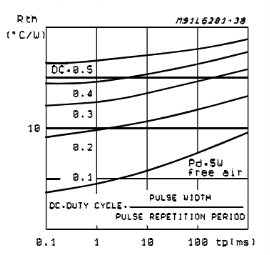
�D20L6201/1P/2/3��늉�������9��18V ������ ���ڴ���(q��)�����ĸ�Ч���ܣ���������Ҫ�����ğ�������߾��Ǻ���������P.C.B�����ɔز��·(L6201/2)�������d�ĕr��L6203��Ҫ�m��(d��ng)?sh��)Ľ��ء�ͬ�ӵ���r����(d��ng)�ز��·������L6201�ϕr����D23���D21ָ��ԓ����x��Ļ��^(q��)��e��L6201�Ĺ������������_(d��)ʽ�� RTh j-amb = (Tj max. �C Tamb max) / Ptot �D22�ܿ�����һ���}�_���ȕr�g��(n��i)���ֵ�c�ضȵ��P(gu��n)ϵ���D23��24�漰��L6202������L6203߀��һ�����ӵėl�����D25(������c�܇��ضȵ�Ӱ�)���D26(��ֵ�������}�_���ȵ��P(gu��n)ϵ)�����D27�t�dž��}�_����ֵ��
�D21.L6201��RTh J-amb�c������eʾ��D �D22���������ֵ�c���}�_ʾ��D �D23.L6202��RTh J-amb�c������eʾ��D �D24.L6202���������ֵ�c���}�_ʾ��D
�D25. Multiwatt���b�Ĺ��� �D26.L6203���������ֵ�c�؏�(f��)�}�_ʾ��D �D27.���͟�����}�_�����c���ڌ���ϵ��(sh��)
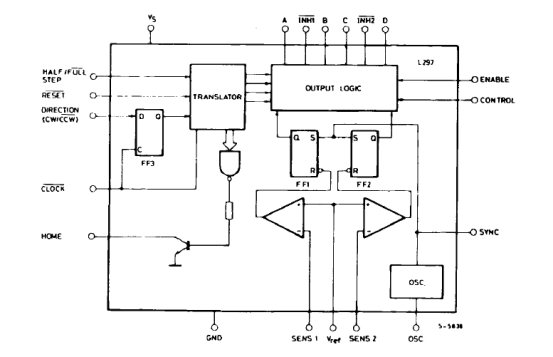
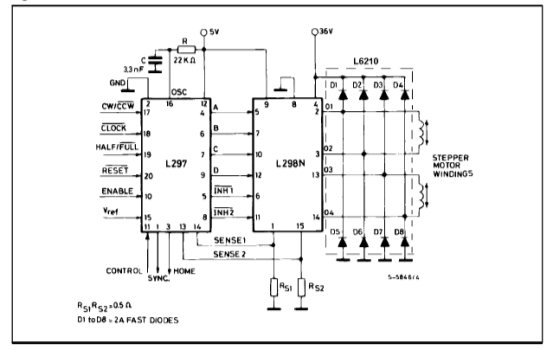
L297 ���M(j��n)늙C(j��)������
- ��Ҏ(gu��)�����(q��)��
- ��/ȫ����ʽ
- �/��r��D(zhu��n)�ӷ���
- Ҏ(gu��)�����_�P(gu��n)ؓ(f��)�d���
- �ɾ���ؓ(f��)�d���
- ����O(sh��)����
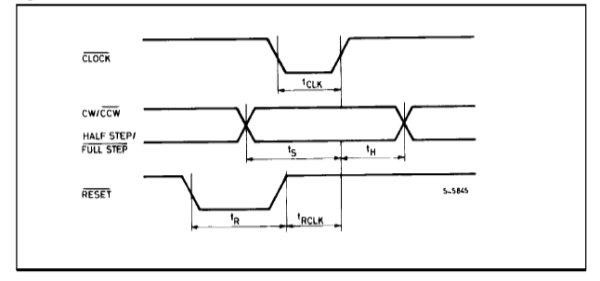
- ��(f��)λݔ��&����(zh��n)ݔ��
- ʹ�ܶ�ݔ��
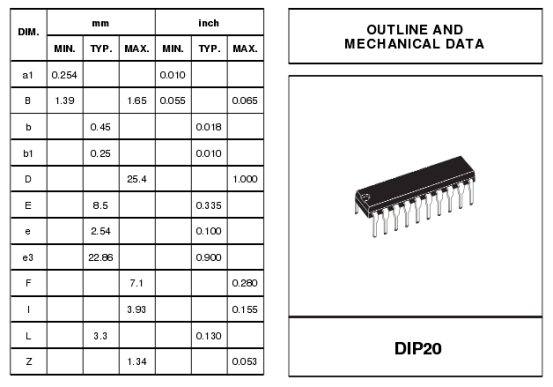
���� L297����̎�������g(sh��)�ļ����·оƬ�����������p�O�Ի������ΘO�ԵIJ��M(j��n)늙C(j��)��������늙C(j��)���ڰ벽����(bi��o)��(zh��n)�����»�����PWM�ز��·���x��ʽ�µľ�Ȧ������(q��)�ӡ��@�оƬ�����c(di��n)��ֵ��Ҫ�r���̖��늙C(j��)�����D(zhu��n)�����ݔ����̖���ԏ�̎�����ļ��ɻ��Ϳɾ��̻����\(y��n)�ã���ǿ���ʹ�ô����Ĝp�١����b���p��ֱ��(20���_)�ͱ����NƬ(20���_)��L297������һ���Kȫ����(q��)��������L298N��L293E���߄e���(q��)�������(q��)����ʹ�á�  ���(sh��)��(j��)��L297/1(�p��ֱ��20���_) L297d(�����NƬ20���_) |
�^������~��ֵ
�����p�O�Բ��M(j��n)늙C(j��)�����·
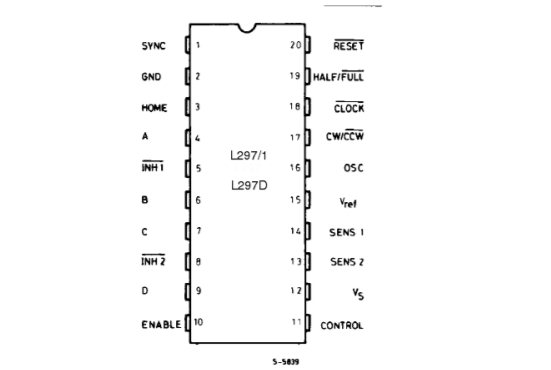
���_�D(��ҕ)
�Y(ji��)��(g��u)�D(L297/1 - L297D)
���_����L297/1 - L297D | | | | | оƬݔ���ز��� ����ʩ�r�Դݔ�����r�£�ͬ�����_ݔ���ˑ�(y��ng)�����B������L297��ͬ�����_�͔ز��������dž������_�� | | | | | | ��늘O�_·ݔ���ˡ���(d��ng)L297�ij�ʼ��(ABCD�˿���0101)�r���c�ز������B����̖��Ч�����w���\(y��n)�� | | | | | | ���ƽ��Ч���ܿ���A��B����(q��)�� �p�O��늙C(j��)�ڴ���̖�(q��)���£���Ѹ��˥�p��Ȧ�������(d��ng)Control���ǵ��ƽ�r��Ҳ�����ڔز��·�� | | | | | | | | | ���ƽ��Ч���ܿ���C��D����(q��)�� ����ͬINT1һ�� | | | | | | оƬ��ʹ�ܶˡ��õ��ƽ�r��INT1,INT2,A,B,C,��D������ʹ�� | | | ���ƶ�ȡ�Q�ڔز��� �ز������ƽ����INT1��INT2�����߸��ƽ����ABCD���� | | | | | | �z�yC��D���ؓ(f��)�d�����늉� | | | �z�yA��B���ؓ(f��)�d�����늉� | | | �ز����ą���늉����Q�������_�ķ�ֵ����늉� | | | �K�˵�RC(R��VCC�Դ�ˣ�C�ӵ�)�·�Q���˔ز����ĵȼ����˶˿��ڲ�ͬ��оƬ�ĽM�B(t��i)��һ��һ�ӡ�f1/0.69 RC | | | �r�������/�½��ؿ���ݔ�� 늙C(j��)���������D(zhu��n)����ͬ�rȡ�Q�ھ�Ȧ������� ��׃����������S�r��׃���D(zhu��n)���� | | | ���M(j��n)�r��}�_�����ƽ��Ч��һ���r��}�_�(q��)��늙C(j��)ǰ�M(j��n)һ�� | | | Half/Full���Hݔ�롣���ƽ��벽�\(y��n)�У����ƽ�������\(y��n)�С���(d��ng)L297��ż��(sh��)�Ġ�B(t��i)������늙C(j��)�x��FULL������늙C(j��)�ھ��w���攵(sh��)�r�x��FULL(HOME�ó�ʼ��B(t��i)) | | | ��(f��)λݔ�룬���ƽ��Ч����ɳ�ʼ��(ABCD�˿���0101) |
����ֵ��(sh��)��(j��) | | | | | | ��(ji��)�c(di��n)������� ���ֵ | | | |
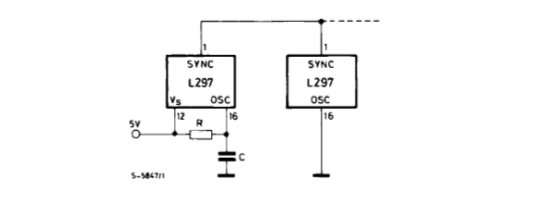
�·��B L297����Ҫ��;��늙C(j��)���(q��)���p���ֹ�(��(f��)�Ͼ��w��)�����оƬ���@�оƬ�ܵ��������ĕr���̖��������̖����(һ��Ŀ�������̎����)�����Y(ji��)�Ͽ�����̖�a(ch��n)����ͬ�Ĺ��ʼ��� ���F(xi��n)�@Щ���ܵ���Ҫ�����Ǿ��w�ܣ����w������(j��)늙C(j��)������PWM���������Ȧ�ķ����w������(j��)HALF/FULL���_���x�������N������ʽ����һ����Ҏ(gu��)��ʽ(������(d��o)�)�������(q��)��(������(d��o)�)���벽�(q��)��(������(d��o)늺̓�����(d��o)늵Ľ���)��L297�ăɷN�ДʽҲͬ���܉��(q��)�Ӱ벽������ģʽ�������̖��ֱ��������L298��ʹ�ܶˣ��ھ�Ȧ����(d��o)늵ĕr�������˥�p����(d��ng)L297��������늙C(j��)���(q��)��������ô��Ҫ�������@Щ���ϣ�A,B,C,D,INT1��INT2���ྀAB߀��CD�ǽ���ز��ģ���(d��ng)һ�M�ز��r��һ�M�e�ã��������Д����̖��������L297��L298�ĽM�B(t��i)���g(sh��)�У�������ؓ(f��)�d�Ĺ��ġ� һ����ģ�ز�������Ҫ2���p��(w��n)�B(t��i)���C��ʎ��(�|�l(f��)��)FF1��FF2���ṩ�}�_���y���z�y���(�B����SENS1��SENS2֮�g)����(d��ng)��Ȧ�ϵ�������_(d��)�ɾ��̵ķ�ֵ늉�Vref����(n��i)�õ�ͬ�����^��������2���p��(w��n)�B(t��i)���C��ʎ�������g���g��һֱ��Ч��ֱ���ز������}�_���_(d��)�ĕr�ɂ���Ȧ�ķ�ֵ늉�������ͨ�^�ą���늉�Vref�Ŀɾ��̻��팍�F(xi��n)�ġ����@���M�B(t��i)�·�У��ӵ�����ͨ�^ͬ���ز������ܺõĿ˷�����ه�������B�ӵ�SYNC���_��RC�V���W(w��ng)�j(lu��)�ͽӵص�OSC���_��
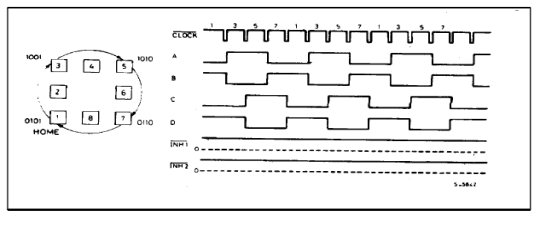
늙C(j��)�(q��)������ L297�ľ��w���ܮa(ch��n)���������У���Ҏ(gu��)�����κͰ벽��ʽ���@���N�(q��)�ӷ�ʽ�������Ό��ں�����¹�(ji��)����B�������е��@Щ��r�У����w�ܶ����ڸߵͽ���ĕr��}�_�е��Ԍ��F(xi��n)��형r����D(zhu��n)�ķ�����Ҫ�����ģ���rᘵ������형r������Ƶģ�ֻ�跭�D(zhu��n)���w�ܵĠ�B(t��i)��ABCD��0101
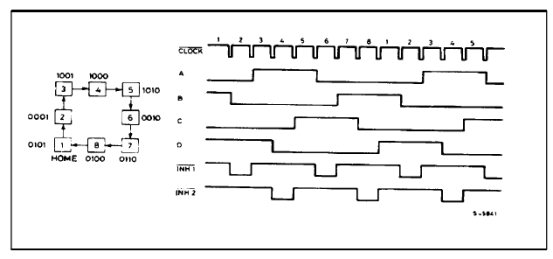
�벽�(q��)�ӷ�ʽ HALF/FULL�ø��ƽ�r���ǰ벽�(q��)��ģʽ ��Ҏ(gu��)�(q��)�ӷ�ʽ HALF/FULL�õ��ƽ�r���dz�Ҏ(gu��)�(q��)�ӷ�ʽ (Ҳ���������(q��)��) ���w�����攵(sh��)�Ġ�B(t��i) (1, 3, 5 �� 7)�� �@�N��ʽ�� INH1��INH2ݔ�����f�Ǹ��ƽ
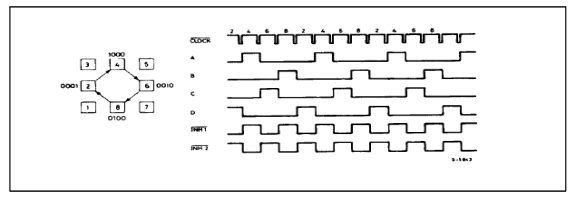
(�m(x��)) �����(q��)�ӷ�ʽ HALF/FULL�õ��ƽ�r��Ҳ�Dz����(q��)�ӷ�ʽ(Ҳ�І����(q��)��) ���w����ż��(sh��)��B(t��i)(2,4,6����8) 늚����ԈD(��Y(ji��)��(g��u)�D��ʾ����r��Tamb = 25C, Vs = 5V���o�e������) | | | | | | | | |
| |
| | | | | |
| | | | | ݔ��늉� (���_11,17,18,19,20) |
| |
|
| | | | |
| | | | ݔ����� (���_11,17,18,19,20) |
| |
| | |
| |
|
| | | | |
| | |
| | | |
|
| | | | |
| |
|
| | | |
|
| | | | | |
|
| | | | |
|
| | | | |
|
| | | | |
|
| | | | | |
|
| | |
|
| |
|
(�m(x��)) | | | | | | | | | |
|
| | | | | |
|
| | | | | |
|
| | | | ���^���O��� (���_13,14,15) |
| |
| | | | |
| |
| | | | |
| |
|
| | | |
| |
|
| | | |
| |
|
| | | |
| |
|
| | | |
| |
|
| |
�D1.
��(y��ng)����Ϣ �����p�O�Բ��M(j��n)늙C(j��)�����· �����p�O�Բ��M(j��n)늙C(j��)�ľ�Ȧ�������2A�����O�ܵĿ��������2A
�D2..
�D3.ͬ��L297s
ȫ���O(sh��)Ӌ�Y��51hei���d��ַ��
| 




 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664







 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��