
Altium Designer畫的L298N直流電機(jī)與步進(jìn)電機(jī)可編程驅(qū)動(dòng)控制模塊電路原理圖和PCB圖如下:(51hei附件中可下載工程文件)

0.png (104.98 KB, 下載次數(shù): 45)
下載附件
2018-2-20 02:40 上傳
0.png (79.25 KB, 下載次數(shù): 64)
下載附件
2018-2-20 02:40 上傳
0.png (53.87 KB, 下載次數(shù): 53)
下載附件
2018-2-20 02:41 上傳
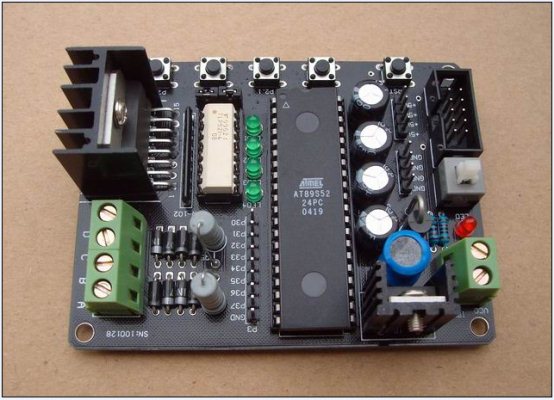
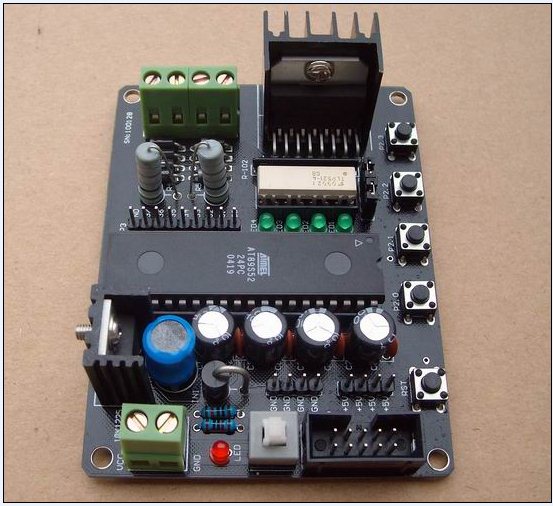
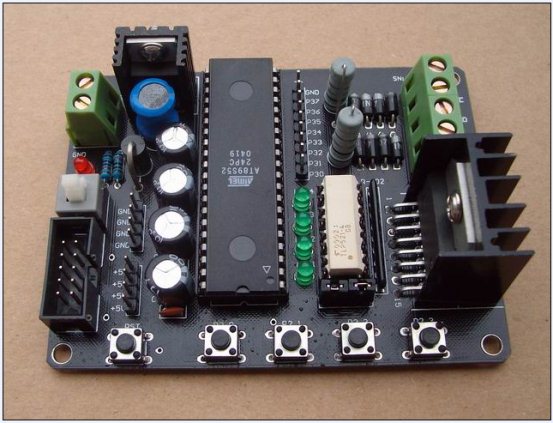
簡要說明: 一、尺寸:長88mmX寬67mmX高35mm
二、主要芯片:L298N、光電耦合器
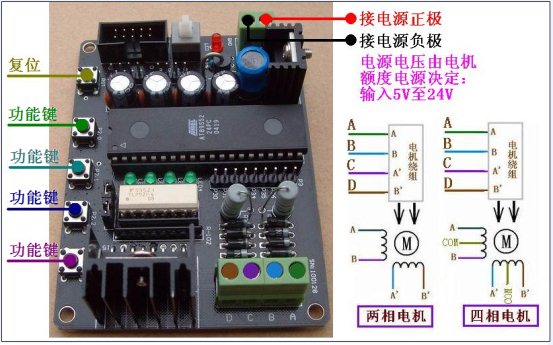
三、工作電壓:輸入電壓(5V~30V)輸入電壓的大小由被控制電機(jī)的額定電壓決定。
四、可驅(qū)動(dòng)直流(5~30V之間電壓的直流電機(jī)或者步進(jìn)電機(jī))
五、最大輸出電流2A (瞬間峰值電流3A)
六、最大輸出功率25W
七、特點(diǎn):
1、具有信號(hào)指示
2、轉(zhuǎn)速可調(diào)
3、抗干擾能力強(qiáng)
4、具有續(xù)流保護(hù)
5、可單獨(dú)控制兩臺(tái)直流電機(jī)
6、可單獨(dú)控制一臺(tái)步進(jìn)電機(jī)
7、PWM脈寬平滑調(diào)速(可使用PWM信號(hào)對(duì)直流電機(jī)調(diào)速)
8、可實(shí)現(xiàn)正反轉(zhuǎn)
9、采用光電隔離
10、P3口全部引出
11、四位LED燈指示
12、四位按鍵輸入(可以對(duì)AT89S52單片機(jī)編程實(shí)現(xiàn)任何控制)
最大特點(diǎn):可以對(duì)AT89S52單片機(jī)編程實(shí)現(xiàn)任意控制被控的直流電機(jī)或者步進(jìn)電機(jī)。
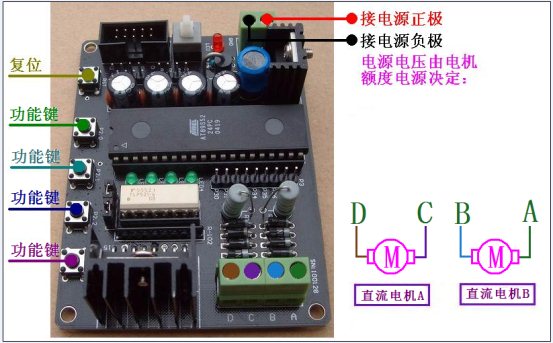
注意啦:提供例程(附帶原理圖以及說明!) 【標(biāo)注圖片】
image004.jpg (44.77 KB, 下載次數(shù): 61)
下載附件
2018-2-19 01:54 上傳
【步進(jìn)電機(jī)接線圖】 【直流電機(jī)接線圖】 實(shí)例一:步進(jìn)電機(jī)的控制實(shí)例 步進(jìn)電機(jī)是數(shù)字控制電機(jī),它將脈沖信號(hào)轉(zhuǎn)變成角位移,即給一個(gè)脈沖信號(hào),步進(jìn)電機(jī)就轉(zhuǎn)動(dòng)一個(gè)角度,因此非常適合于單片機(jī)控制。步進(jìn)電機(jī)可分為反應(yīng)式步進(jìn)電機(jī)(簡稱VR)、永磁式步進(jìn)電機(jī)(簡稱PM)和混合式步進(jìn)電機(jī)(簡稱HB)。 一、步進(jìn)電機(jī)最大特點(diǎn)是: 1、它是通過輸入脈沖信號(hào)來進(jìn)行控制的。 2、電機(jī)的總轉(zhuǎn)動(dòng)角度由輸入脈沖數(shù)決定。 3、電機(jī)的轉(zhuǎn)速由脈沖信號(hào)頻率決定。 二、步進(jìn)電機(jī)的驅(qū)動(dòng)電路 根據(jù)控制信號(hào)工作,控制信號(hào)由單片機(jī)產(chǎn)生。(或者其他信號(hào)源) 三、控制步進(jìn)電機(jī)的速度 如果給步進(jìn)電機(jī)發(fā)一個(gè)控制脈沖,它就轉(zhuǎn)一步,再發(fā)一個(gè)脈沖,它會(huì)再轉(zhuǎn)一步。兩個(gè)脈沖的間隔越短,步進(jìn)電機(jī)就轉(zhuǎn)得越快。調(diào)整單片機(jī)發(fā)出的脈沖頻率,就可以對(duì)步進(jìn)電機(jī)進(jìn)行調(diào)速。(注意:如果脈沖頻率的速度大于了電機(jī)的反應(yīng)速度,那么步進(jìn)電機(jī)將會(huì)出現(xiàn)失步現(xiàn)象)。 四、此板驅(qū)動(dòng)步進(jìn)電機(jī)測試程序 
說明:以AT89S52單片機(jī)控制單元,C語言編程! 【測試程序】 - /********************************************************************
- 匯誠科技
- 實(shí)現(xiàn)功能:正轉(zhuǎn)_反轉(zhuǎn)_減速_加速程序
- 使用芯片:AT89S52 或者 STC89C52
- 晶振:11.0592MHZ
- 編譯環(huán)境:Keil
- 作者:zhangxinchun
- 淘寶店:匯誠科技
- *********************************************************************/
- #include<reg52.h>
- /*------宏定義------*/
- #define uchar unsigned char
- #define uint unsigned int
- /*****P1.0=A ;P1.1=B ;P1.2=A' ; P1.3=B'****/
- /*******************************正轉(zhuǎn)數(shù)組**************************************************/
- code unsigned char runz[8]={0x05,0x01,0x09,0x08,0x0a,0x02,0x06,0x04}; //兩相四線八拍工作方式
- /*******************************反轉(zhuǎn)數(shù)組**************************************************/
- code unsigned char runf[8]={0x04,0x06,0x02,0x0a,0x08,0x09,0x01,0x05}; //兩相四線八拍工作方式
- uchar keycan=0; //鍵值
- int y=15;//定義轉(zhuǎn)動(dòng)速度,數(shù)值越大電機(jī)轉(zhuǎn)速越慢反之則快
- sbit P2_0=P2^0;//正轉(zhuǎn)按鍵
- sbit P2_1=P2^1;//反轉(zhuǎn)按鍵
- sbit P2_2=P2^2;//電機(jī)減速
- sbit P2_3=P2^3;//電機(jī)加速
- /********************************************************************
- 延時(shí)函數(shù)
- *********************************************************************/
- void delay(i)//延時(shí)函數(shù)
- {
- uchar j,k;
- for(j=0;j<i;j++)
- for(k=0;k<250;k++);
- }
- /********************************************************************
- 正轉(zhuǎn)運(yùn)行函數(shù)
- *********************************************************************/
- void zrun()// 正轉(zhuǎn)運(yùn)行
- {
- uchar z;
- for(z=0;z<8;z++)
- {
- P1=runz[z];
- delay(y);
- }
- }
- /********************************************************************
- 反轉(zhuǎn)運(yùn)行函數(shù)
- *********************************************************************/
- void frun()// 反轉(zhuǎn)運(yùn)行
- {
- uchar z;
- for(z=0;z<8;z++)
- {
- P1=runf[z];
- delay(y);
- }
- }
- /********************************************************************
- 主函數(shù)
- *********************************************************************/
- main()
- {
- while(1)
- {
- if(P2_0==0) //如果電機(jī)正轉(zhuǎn)按鍵按下
- {
- keycan=1; //鍵值等于1
- }
- if(P2_1==0) //如果電機(jī)反轉(zhuǎn)按鍵按下
- {
- keycan=2; //鍵值等于2
- }
- switch (keycan)
- {
- case 1: zrun(); //鍵值等于1 正轉(zhuǎn)
- break;
- case 2: frun(); //鍵值等于2 反轉(zhuǎn)
- break;
- }
- if(P2_2==0) // 電機(jī)減速
- {
- y+=2;
- }
- if(P2_3==0) // 電機(jī)加速
- {
- y-=2;
- }
- }
- }
實(shí)例二:直流電機(jī)的控制實(shí)例 使用直流/步進(jìn)兩用驅(qū)動(dòng)器可以驅(qū)動(dòng)兩臺(tái)直流電機(jī)。分別為M1和M2。引腳A,B可用于輸入PWM脈寬調(diào)制信號(hào)對(duì)電機(jī)進(jìn)行調(diào)速控制。(如果無須調(diào)速可將兩引腳接5V,使電機(jī)工作在最高速狀態(tài),既將短接帽短接)實(shí)現(xiàn)電機(jī)正反轉(zhuǎn)就更容易了,輸入信號(hào)端IN1接高電平輸入端IN2接低電平,電機(jī)M1正轉(zhuǎn)。(如果信號(hào)端IN1接低電平, IN2接高電平,電機(jī)M1反轉(zhuǎn)。)控制另一臺(tái)電機(jī)是同樣的方式,輸入信號(hào)端IN3接高電平,輸入端IN4接低電平,電機(jī)M2正轉(zhuǎn)。(反之則反轉(zhuǎn)),PWM信號(hào)端A控制M1調(diào)速,PWM信號(hào)端B控制M2調(diào)速。可參考下圖表: | | | | | | 輸入PWM信號(hào)改變脈寬可調(diào)速 | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
五、此板驅(qū)動(dòng)直流電機(jī)測試程序 
【測試程序】 - /********************************************************************
- 匯誠科技
- 實(shí)現(xiàn)功能:直流電機(jī)調(diào)試程序
- 使用芯片:AT89S52 或者 STC89C52
- 晶振:11.0592MHZ
- 編譯環(huán)境:Keil
- 作者:zhangxinchun
- *********************************************************************/
- #include<reg52.h>
- #define uchar unsigned char//宏定義無符號(hào)字符型
- #define uint unsigned int //宏定義無符號(hào)整型
- sbit P2_0=P2^0;//M1啟動(dòng)
- sbit P2_1=P2^1;//M1停止
- sbit P2_2=P2^2;//M2啟動(dòng)
- sbit P2_3=P2^3;//M2停止
- sbit P1_0=P1^0;//M1
- sbit P1_1=P1^1;//M1
- sbit P1_2=P1^2;//M2
- sbit P1_3=P1^3;//M2
- /********************************************************************
- 延時(shí)函數(shù)
- *********************************************************************/
- void delay(uchar t)//延時(shí)程序
- {
- uchar m,n,s;
- for(m=t;m>0;m--)
- for(n=20;n>0;n--)
- for(s=248;s>0;s--);
- }
- /********************************************************************
- 主函數(shù)
- *********************************************************************/
- main()
- {
- while(1)
- {
- if(P2_0==0){delay(3);if(P2_0==0)//M1啟動(dòng)
- {
- P1_0=1;
- P1_1=0;
- }}
- if(P2_1==0){delay(3);if(P2_1==0)//M1停止
- {
- P1_0=1;
- P1_1=1;
- }}
- if(P2_2==0){delay(3);if(P2_2==0)//M2啟動(dòng)
- {
- P1_2=1;
- P1_3=0;
- }}
- if(P2_3==0){delay(3);if(P2_3==0)//M2停止
- {
- P1_2=1;
- P1_3=1;
- }}
- }
- }
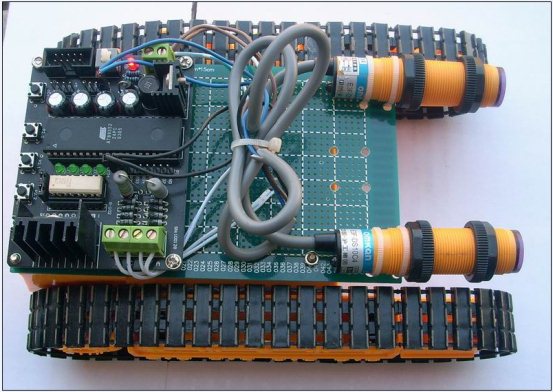
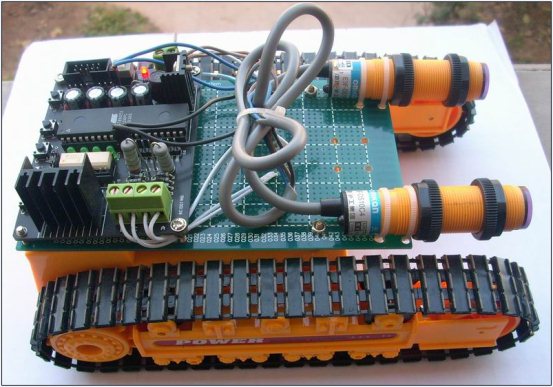
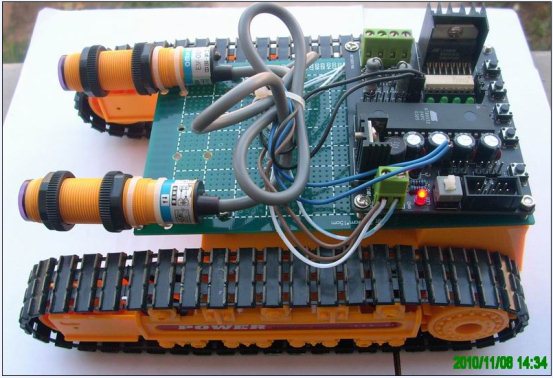
【圖片展示】 【應(yīng)用舉例】 | 











 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩
