
ǰ�ԣ�
�mȻһ·����������(j��ng)�^������IJ�иŬ�����ҽK������˱������Ϻ���W���Ą�(chu��ng)���Ŀ——�����֙C�b��늟��о����ڴ˸��x��Щ�o���^��?gu��)������ˣ��e���x�ϰֽo��ļ��g(sh��)�ϵĎ�����
�Ö|����Ȼ���ܪ������������Ҳ���w�һ�¼���(li��n)�W(w��ng)�����ܼҾӺ�һ��ѬF(xi��n)���Ƽ����~��һ�w�ĬF(xi��n)�����Ӽ�������ԛQ���l(f��)һƪ�̳̣�����������֙C���b��늟�������Ո�@������
�²�һ��:�Ϻ���WУ����(chu��ng)���Ŀ��(j��ng)�M3000Ԫ����h��W1000
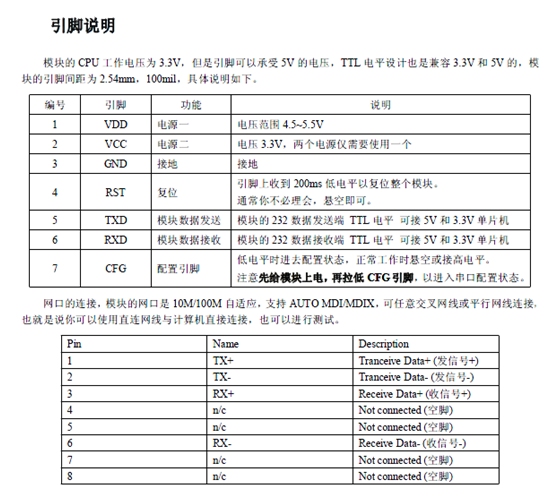
�UԒ�����f�ˣ������_ʼ��
�_�l(f��)�h(hu��n)����
����AVR128��Ƭ�C��C�Z�Ծ�������avrstudio4setup.exe4.19 + WinAVR-20100110-install.exe + vr-toolchain�������g�����档
�������ģ�
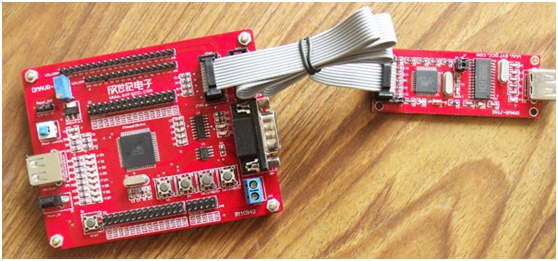
1.USB�ӿ�JTAG������+AVR128��Ƭ�C����jtag�B����X�����е�C������aͨ�^avrstudio4�@��ܛ�������M��Ƭ�C��CPU�У�����avrstudio4��ʹ���f���W(w��ng)���кܶ࣬�@�ﲻ���f������
2.SRD-5VDC-SL-C 1· 5V�^����(q��)��ģ�K ��

3.TCP232-T �����D(zhu��n)��̫�W(w��ng)�p����̫�W(w��ng)�D(zhu��n)����TCP��IP�D(zhu��n)���ڡ�RJ45�D(zhu��n)TTL��

4.�����֙Cһ��

5.늟�....
1��ϵ�y(t��ng)�OӋ��
���ܼҾ���(li��n)�W(w��ng)������
1.AVR128 PORTD�� �����^���ģ�K���������_�l(f��)����^�����ԭ��D�����B�ӷ�ʽ��
2.AVR128 Usart0 �cTCP232-TͨӍ������ָ���D(zhu��n)�QPORTD�ƽ
3.�^���ģ�K�� ���F(xi��n)��ͨ����ƣ��Mһ����������O�䣬��������늟�
4.TCP232-Tģ�K�����F(xi��n)����ͨӍ�cTCPͨӍ��ͨ����ݔ������ģʽ��Client��TCP�f(xi��)�h�������B���h�̷�����������AVR128��ָ�
�b�ض�
�����֙C��ͨ�^WEB�W(w��ng)퓻��ߑ���ܛ�������h��늟�
2��ָ��f(xi��)�h�����b�ض˰l(f��)�͵������������ɷ������V����TCP232-Tģ�K�����Ɇ�Ƭ�C�M�н����Ŀ����^�������,����_������늟���Ŀ�ģ�
1.�_��ָ�1212140400DBBF PORTDݔ�����ƽ���^���ģ�K�@�õ��λ�����_��B(t��i)�D(zhu��n)�Q���]�Ϡ�B(t��i)
2.�P(gu��n)��ָ�12121404FF9BFF PORTDݔ�����ƽ���^���ģ�K�@�õ��λ�����_��B(t��i)�D(zhu��n)�Q���]�Ϡ�B(t��i)
3.��ԃ����B(t��i)ָ�12121404AAxxxx �@ȡPORTD��B(t��i)�����ء�
����12121404�鱾�����R��TCP232-Tģ�K�ɹ��B�ӷ��ն˺l(f��)���O���O����R�� ������12121404,����ָ����12121404���^��
ʮ���M��
����
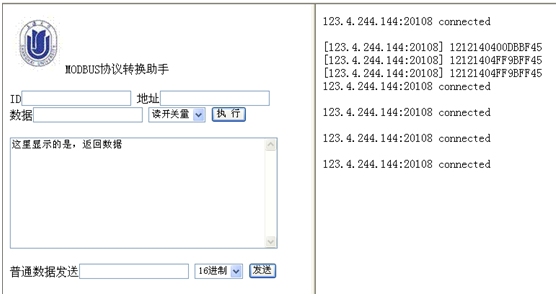
�l(f��)��1212140400DBBF
����12121404����R��00���_��ָ�DBBF��CRC�z�a���Á�z���ƶ˰l(f��)�͵�16�M�ƴ��a�ͷ��������յ���16�M�ƴ��a�Ƿ���ͬ��ԔҊ���ĵ�C������a��
����������[123.4.244.144:20108] 45
����123.4.244.144�������IP��ַ��20108�������TCP�˿ڣ�45��ʾָ���ʽ���_���������_��(zh��)��
����������[123.4.244.144:20108] 4BDBBF
4BDBBF��ʾָ����R���_������CRC�����_�����_��CRC��DBBF
����������[123.4.244.144:20108] 4B
��ָ����������e�`��
3�����ܼҾ���(li��n)�W(w��ng)�����������OӋ
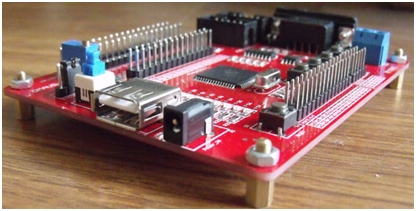
�Դ������220�D(zhu��n)5V/200mA�y(t��ng)һ��늣����������Ɇ�Ƭ�C�ṩVDD5V��VCC3.3V����Ƭ�C������5V��B(t��i)��ע����������
����TCP232-T ��Ҫ50mA���ܷ�(w��n)��������SRD-5VDC-SL-CҲ��Ҫ50mA�������_���������Բ��ê����Դ��
�����OӋ��
����������^���У�ʹ��Ӌ��CUSB��2.0����늣��Ϊ����̌���^������������������Ϊ�ʹ��TCP232-TҲ�������B�ӾW(w��ng)�j��(li��n)���{(di��o)ԇ�ĕr���^���������������ԭ������Ԟ��Ƭ�C�ṩ������ޣ�ؓ�d�����������]����Ƭ�C������Ҫ100mA����������S���ê����Դ��늣����ṩ������������ɹ���
AVR��Ƭ�C�_�l(f��)��
�Ѓɹ�늷���USB�ͪ����Դ������5V��3.3������������Ƭ�C������5V��B(t��i)��
�^���ģ�K�Դ�OӋ
ʹ��5V��늣�3���Ӿ������քe���Դ�������ƾ������λ��Ч�����Դ�ء��քe�B�ӵ��Դ����AVR��PORTD�ڣ��Դ�ء�
�^���ģ�Kݔ�����B�ӱ������O�䣬������늟��Դ���еĻ�����3���ӿڣ����g�鹫���أ�һ�˞鳣�_��B(t��i)����һ�˞鳣�]��B(t��i)������ʹ�ó��_��B(t��i)�������Ñ�ָ����F(xi��n)���_���]�̈́�����
TCP232-Tģ�K�Դ�OӋ
�Դʹ��5V��늣�����ͨӍ��TTL�ƽ��<3.3V��0��3.5-5V��1�����ڞ�-9V - +9V�ƽ����0V��0����1V��1���ɷN�ӿڲ��ܽ��e����TTL�ƽ����ֱ�ӽӆ�Ƭ�C�˿ڡ�
�����TTL�ƽ��ֱ��POARTE0��POARTE1������Ǵ���ģ�K���ӆ�Ƭ�C�_�l(f��)�崮�ڡ�����ֻʹ��2��3��5��������

4��ԭ��D
AVR�_�l(f��)��
PORTD���^���ģ�K���麆�Σ����˿�0x00����0xFF���Կ��ƶ˿��ƽ�����F(xi��n)�����^���������
PORTE��8��LED��һ���Á����_�l(f��)�^����ָʾ������B(t��i)��������K�汾�o�á�
POARTE0��POARTE1��TTL�ƽ��TCP232-Tģ�K��TXD��RXD
POARTE0��POARTE1�����OӋ�B��MAX232�D(zhu��n)�QоƬ�ͽӿڣ��������O��ͨӍ��
USART1��485�D(zhu��n)�Q��
�����Դ���_�P(gu��n)����λ�I��4���I�P��

�^���ģ�K
ݔ��ˣ��քe���Դ����PORTD����һ�������Դ��
ݔ���ˣ�ʹ�ó��_�ӿڣ�ֻ�ܿ���1�l��·���������Ñҿա�
�Դ���Դ����VDD���Դ�ؽ�GND��
TCP232-Tģ�K
? RJ45�ӿڣ��˜ʵľW(w��ng)�ڣ�ʹ��1��2��3��6�ĸ���
? ���ڶˣ�TTL�ƽ��RXD��POARTE0��POARTE1��TXD
? �Դ���Դ����VDD���Դ�ؽ�GND��
? CFG���ã���������ף������GND���tģ�K�����ڴ����O��ģʽ����푑��W(w��ng)�j�B�ӡ�
? ��λ����PORTF����λͨӍģ�K��
5��ʹ���f��
��������
��ܛ��ʹ��VB����
Modbus�f(xi��)�hҎ(gu��)���Ă�ݔý���д��п�������̫�W(w��ng)�ɷN�����д��п���Ҏ(gu��)����ASCIIģʽ��RTUģʽ�ɷN��ݔ��ʽ����ܛ����GB/T19582-2008���{�������F(xi��n)Modbus�f(xi��)�h��TCPģʽ��ASCIIģʽ��RTUģʽ֮�g��D(zhu��n)�Q������UDP�f(xi��)�h�{��TCPģʽ�����F(xi��n)�V��ͨӍ��ģ�M���𣬛]�������O��Ҳ�����{(di��o)ԇϵ�y(t��ng)���Uչ��TCPģʽ���_�l(f��)����Webserver�����F(xi��n)��3�Nģʽ�cHTTP�f(xi��)�h֮�g���D(zhu��n)�Q��ʹͨ�Þg�[��������Window ��IE����Andriod �Ğg�[�����ɞ��������

�ⲿ�ӿڣ�
RJ45 ���W(w��ng)��
J1�����ƾ���23������1�鳣�_��4�鳣�]�����Կ���250V����늉���2A�����
�Դ��5V
�_�P(gu��n)�����Դ�_�P(gu��n)
�W(w��ng)�j�ӿ��O����
����ʹ��RJ45�ھW(w��ng)�j���ã�����ܛ����������Clientģʽ��ͨ�^�о���(n��i)���W(w��ng)�j���B�ӹ��W(w��ng)SERVER������(j��)�W(w��ng)�j�h(hu��n)�����O���o�B(t��i)IP����֧��DHCP��
���O�ñ��CIP���W(w��ng)�P(gu��n)���˿�20108�����h��SERVER��ַ�Ͷ˿�8234�������OӋ����W(w��ng)�Ԅ��B�ӡ�

�����֙CTCP����ܛ��ģʽ��
���ھ���W(w��ng)�͏V��W(w��ng)�������鰲����ܛ��
�W(w��ng)���ҵ��Ђ���easytcp��ܛ�����^��ʹ���������SERVERʹ��
�����֙CWEBģʽ����̫��(w��n)������
���ڏV��W(w��ng)��������ͨ�Þg�[����֧��HTML���ɡ�HTTP�f(xi��)�h���˿�9000��
6�������OӋ
����������C�OӋ
�@��o�����Ĵ��a
//*************************************************************************
// �^���ģ�K�����OӋ
//*************************************************************************
#define Lamp_IO PORTD //�^���ģ�K���ڔ�(sh��)��(j��)��
#define Lamp_DDR DDRD //����Ĵ���
Lamp_IO=0xFF; //��(sh��)��(j��)�ڞ�ݔ��
Lamp_DDR=0xFF;
if((data_buf[RX_length-1]==0xFF) ||(data_buf[RX_length-1]==0x00))
{
usart_send(0x45); //�����յ��Ĕ�(sh��)��(j��)�ٰl(f��)��ȥ
Lamp_Display(data_buf[RX_length-1]); //��PORTD�������^���ģ�K���^������ƽ��Ч��0xFF���P(gu��n)����0x00���_��
}
//*************************************************************************
// USARTͨӍ�OӋ
//*************************************************************************
//���ڲ���ͨ����ݔ����˱���ֻ�漰USARTͨӍ���̣�ʹ��USART0��Ҳ����PORTE0��PORTE1��
//��ʼ��
#define baud 9600 //�O�ò����ʵĴ�С
#define baud_setting (uint)((ulong)F_CPU/(16*(ulong)baud)-1) //������Ӌ�㹫ʽ
#define baud_h (uchar)(baud_setting>>8) //��ȡ��λ
#define baud_l (uchar)(baud_setting) //��λ
void usart_init()
{
UCSR0A=0x00; //�α���ģʽ
UCSR0B=0xF8; //�����Д�Ͱl(f��)���Д����S
UCSR0C=(1<<UCSZ01)|(1<<UCSZ00); //��UCSRC�Ĵ���,����ͨ�şoУ8λ��(sh��)��(j��)1λֹͣλ
UBRR0H=baud_h; //�������ʵ�ֵ
UBRR0L=baud_l;
}
//�l(f��)�͔�(sh��)��(j��)
void usart_send(uchar data)
{
while( !( UCSR0A & (1<<UDRE0)) ); //�ȴ��l(f��)�;��_�����
UDR0 = data; //���յ��Ĕ�(sh��)��(j��)�ٰl(f��)����X
delay_ms(2);
}
//��(sh��)��(j��)���սY(ji��)���Д�����
SIGNAL(SIG_USART0_RECV) //�Д���ճ���
{
uchar RxTemp;
RxTemp=UDR0; //�����յ��Ĕ�(sh��)��(j��)ȡ��
usart_rx_data[RxReadIndex]=RxTemp;
if(++RxReadIndex> Rx_Buf_Size) //��������վ��_�^(q��)�������ڽ��վ��_�^(q��)���L��
RxReadIndex=0; //�t����������0
rx_flag=1;
}
//*************************************************************************
// CRC�z����
//*************************************************************************
uint get_crc(uint n)
{
uchar i,j;
CRC_word=0xffff;//�xֵ��0xffff
for(i=0;i<n;i++)
{
CRC_word^=(uint)data_buf[i];//Ӌ��CRC_word
for(j=0;j<8;j++)
{
if(CRC_word&0x0001)
{
CRC_word=CRC_word>>1;
CRC_word^=0xa001;
}
else
{
CRC_word>>=1;
}
}
}
return CRC_word;
}
�Д�
RX_length=RxReadIndex-2;//*256+data_buf[3];//ȡ��(sh��)��(j��)�L�Ȕ�(sh��)��(j��)
RX_CRC_word=data_buf[RX_length+1]*256+data_buf[RX_length];//ȡCRCУ�a
CRC_word=get_crc(RX_length);//Ӌ����Ք�(sh��)��(j��)У�a
if(CRC_word==RX_CRC_word)//У(sh��)��(j��)���^
{}
��λCRC�a��ȡ
(CRC_word%256);
(CRC_word/256);
//*************************************************************************
// ������
//*************************************************************************
int main(void)
{
system_init(); //ϵ�y(t��ng)��ʼ��
usart_init(); //usart���ڳ�ʼ������
SREG|=0x80; //�_��ȫ���Д�
while(1)
{
_delay_ms(50); //�鴮���Дʽ���t���@������Ҫ������ͨӍ��(sh��)��(j��)�٣�����O��50
if((RxReadIndex>0) && (rx_flag==1))
{
cli(); //ȫ���Д��oЧ��ͬSREG=0x00;
RX_data=&usart_rx_data[0];//ָᘽ��Ք�(sh��)�M��ַ
for(read_count=0;read_count<RxReadIndex;read_count++)//copy
{
data_buf[read_count]=*RX_data++;
usart_send(data_buf[read_count]);
}
receive_code_fun();
_delay_us(5);
RxReadIndex=0;//�����Д�Δ�(sh��)����
rx_flag=0;
sei();//�_ȫ���Д࣬ͬSREG|=0x80;
}
}
}
server����VB�OӋ
ʹ�ÿؼ�����(chu��ng)��WEB�����������ܲ�����HTTP�f(xi��)�h����(zh��)��ָ���HTML��(sh��)��(j��)����
ָ��ֻ�D(zhu��n)�l(f��)�o�ܿ��ƶˡ�
���Դ���a���£�
===========================
<html>
<head>
<title>MODBUS�{(di��o)ԇ --- �Ϻ���W ꐸ�</title>
</head>
<body>
<imgsrc="/img/shu.gif">MODBUS�f(xi��)�h�D(zhu��n)�Q����
<form name="f"action="modbus.html" method=post>
ID<input type="text"name="ID" maxlength="30" >
��ַ<input type="text" name="AD"maxlength="30" ><br>
��(sh��)��(j��)<input type="text" name="DATA_LEN"maxlength="50" >
<select name="FUNC">
<option value ="01">�x�_�P(gu��n)��</option>
<option value ="02">02</option>
<option value="03">�x�Ĵ���</option>
<option value="04">04</option>
</select>
<input type="submit"value="��(zh��)��" ></form>
<textarea rows="10"cols="50">
�@���@ʾ���ǣ����ؔ�(sh��)��(j��)
</textarea>
<form name="N"action="modbus.html" method=post>
��ͨ��(sh��)��(j��)�l(f��)��<input type="text" name="post_send_str"maxlength="80" >
<select name="hexstr">
<option value ="16">16�M��</option>
<option value ="01">�ַ���</option>
</select>
<input type="submit"value="�l(f��)��" ></form>
</form>
</body>
</html>
==================================