|
發布時間: 2017-6-3 14:49
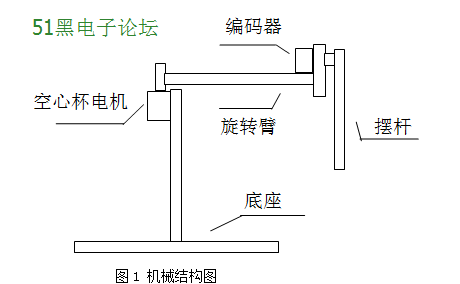
正文摘要:摘要 倒立擺控制系統是一個復雜的、不穩定的、非線性系統。本設計在研究倒立擺運動規律的基礎上,構建其運動軌跡的數學模型,使用MATLAB進行仿真分析,在對倒立擺模型認識以后,使用k60微控制器結合PID算法給出信號 ... |
|
想問一下 編碼器的線與轉軸如何處理的? |
| 樓主 MATLAB仿真怎么弄 |
| 感謝分享 |
| 是一份好的資料。 |
| 樓主有沒有程序的源碼,有償 |
學習學習 |
| APPRECITED IT |
| 最近在一直學習倒立擺相關內容,這個有很大的幫助,多謝分享 |
| 需要得資料,急需 |
| 好資料 |
| 好資料,51黑有你更精彩!!! |
| 好資料,51黑有你更精彩!!! |
 收藏
收藏 頂
頂 踩
踩

