|
發布時間: 2024-12-18 16:12
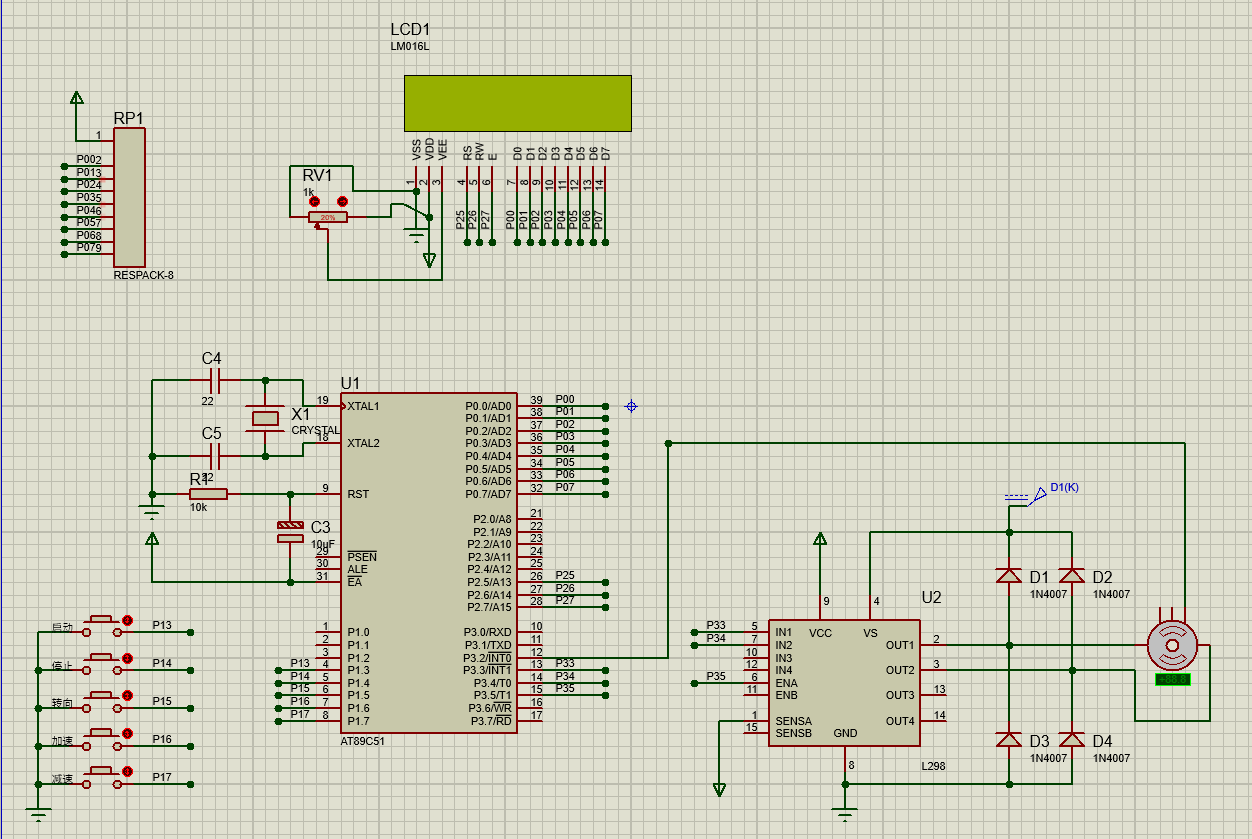
正文摘要:這是一個論壇老哥( ID:171036)20年寫的有一部分我不會調了,我想讓電機的實際轉速與目標轉速一致 /*PID的參數設置可以參照以下來進行: 參數整定找最佳,從小到大順序查; 先是比例后 ... |
|
1,你這個電機控制并不需要D項,PI控制就足夠了 2,I項需要限幅 3,過流控制不過是程序流程上的需要而已,在這個電路中意義不大 |
| PID 速度控制的目的不是使實際輸出速度等于目標速度嗎? 如果程序正確,則可能是由于比例,積分和微分系數缺乏調整。 |
| 怎么可以調節 步進電機的步數? |
| 我測試了一些,是單管控制,過沖比較嚴重,搞很久,最后就是把e限制了值,我編碼器60脈沖,只有一個信號,0.1秒一個測量周期,輸出鎖定在+—10轉,除了因為限制e的值后使提速變的比較緩慢以外,倒是可以實現空載時鎖定速度,200-3000之間都可以,目前沒有測試加載情況。因為電流還要控制,目前沒有好的限流方案用啊。 |
| 頂一下 |
 收藏
收藏 頂
頂 踩
踩

