熱門: 51單片機(jī) | 24小時必答區(qū) | 單片機(jī)教程 | 單片機(jī)DIY制作 | STM32 | Cortex M3 | 模數(shù)電子 | 電子DIY制作 | 音響/功放 | 拆機(jī)樂園 | Arduino | 嵌入式OS | 程序設(shè)計(jì)
熱門: 51單片機(jī) | 24小時必答區(qū) | 單片機(jī)教程 | 單片機(jī)DIY制作 | STM32 | Cortex M3 | 模數(shù)電子 | 電子DIY制作 | 音響/功放 | 拆機(jī)樂園 | Arduino | 嵌入式OS | 程序設(shè)計(jì)
|
發(fā)布時間: 2024-7-17 09:09
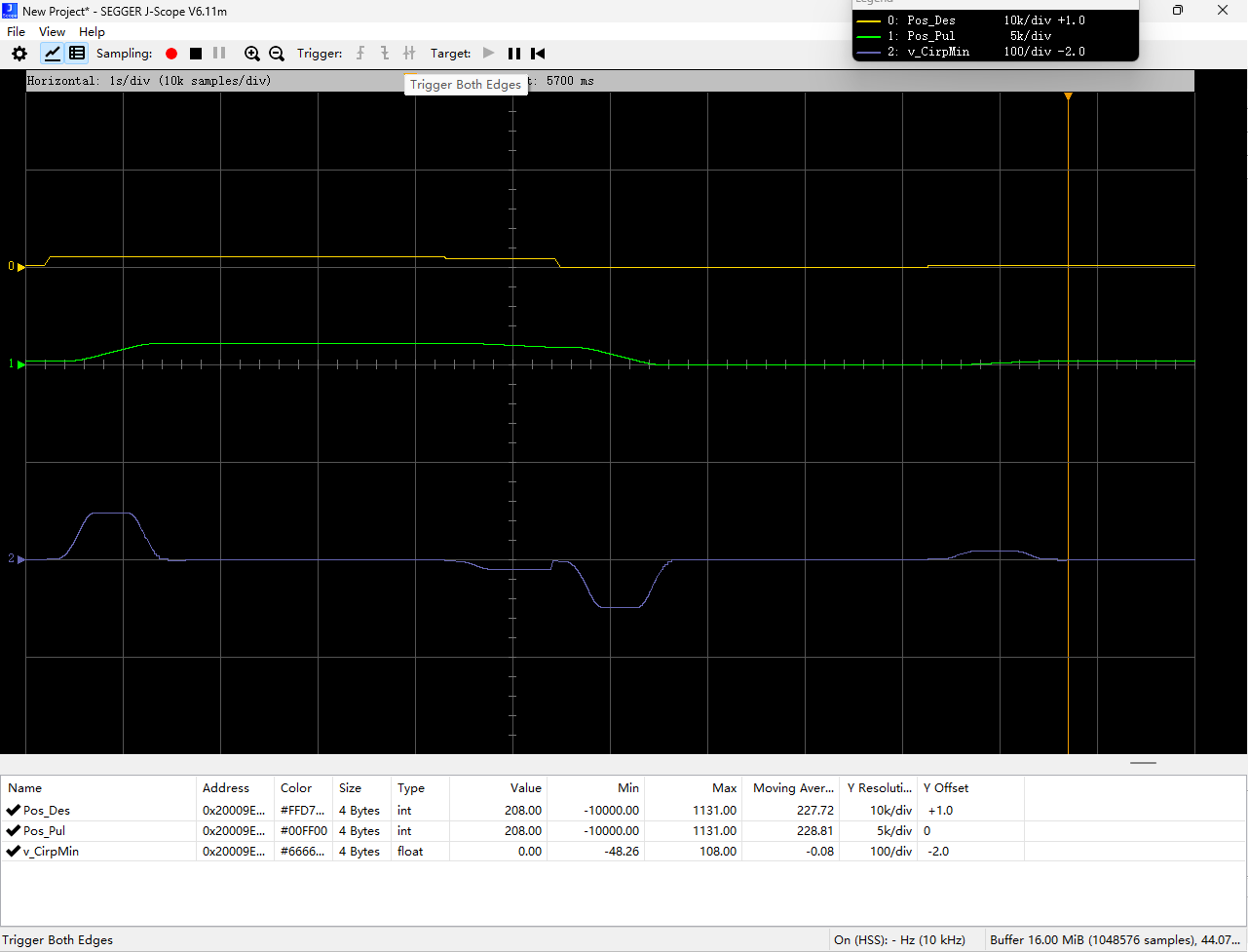
正文摘要:附圖展示了兩個較完美S曲線的速度曲線圖:控制步進(jìn)電機(jī)加減速時,要在一定時間內(nèi)運(yùn)動到指定的位置,此時速度為0無振蕩,有一定的難度,此前已經(jīng)實(shí)現(xiàn),這次在此基礎(chǔ)上,進(jìn)一步實(shí)現(xiàn)了較完美的速度曲線,對 ... |
| 頂一下 |
| 非常好。謝謝分享。對理解這個概念非常有幫助。 |
受教了,謝謝老師父 |
發(fā)表于 2025-7-23 16:42 步進(jìn)電機(jī)用法:1)按指定的頻率給脈沖,按脈沖數(shù)和方向計(jì)算當(dāng)前位置,速度恒定,沒有加減速; 2)在1)的基礎(chǔ)上,將發(fā)脈沖的頻率分成幾檔,算簡易的加減速,有明顯頓挫感; 3)在1)的基礎(chǔ)上,脈沖加減速改成漸變平滑調(diào)速,常用的是建立一個加減速數(shù)組; 4)在3)的基礎(chǔ)上,加減速數(shù)組準(zhǔn)實(shí)時生成,由當(dāng)前位置和目標(biāo)位置通過算法得到一定形狀的速度曲線(理想形狀為S型); 5)在4)的基礎(chǔ)上,附加審查加速度曲線,做到加速度也是平滑曲線,沒有跳變。 |
發(fā)表于 2025-7-24 08:47 6)在5)的基礎(chǔ)上,使用單個定時器同時控制1-4步進(jìn)電機(jī)(stm32看定時器的CCR數(shù)量,有的定時器是4路,有的定時器是2路,有的沒有) |
ColeYao 發(fā)表于 2025-7-24 08:47 你撇了這么%,跟PID有個毛關(guān)系? |
powerdruy 發(fā)表于 2025-7-23 16:42 步進(jìn)電機(jī)目標(biāo)位置自己知道,實(shí)際位置是給脈沖一步一步走出來的,到哪里了自己也很清楚,當(dāng)前位置偏差、速度和加速度都能計(jì)算出來,還要啥傳感器,嫌錢多嗎!  |
ColeYao 發(fā)表于 2025-7-23 12:14 你給步進(jìn)電機(jī)加了傳感器?那為啥不直接用BLDC了 |
rundstedt 發(fā)表于 2025-7-23 09:54 是,您說的對,步進(jìn)電機(jī)和PID控制就是馿唇和馬嘴,不過我就不明白了,我都沒放源碼,您就能判斷出來,真是高人啊! |
| 步進(jìn)電機(jī)是低成本方案,用開環(huán)控制,PID是閉環(huán)控制,你是怎么做到把驢唇安裝到馬嘴上面的? |
Powered by 單片機(jī)教程網(wǎng)

 收藏
收藏 頂
頂 踩
踩
