|
發(fā)布時間: 2023-12-11 09:22
正文摘要:目前是要做一個三軸云臺,有陀螺儀 + 空心杯電機,我理解的環(huán)是,陀螺儀獲取角度,鏡頭中點的固定角度設(shè)置為目標(biāo)角度,然后根據(jù)這個角度今天PID控制驅(qū)動電機,但是沒辦法獲取電機的轉(zhuǎn)速還 ... |
|
這種是需要很多經(jīng)驗的,并不是新手用來上手的項目 1,電路要有堵轉(zhuǎn)檢測,不然,角度沒有達到時,如果你用按著鏡頭不讓它動,電機就會一直在增大電流,最終不是短路保護了就是燒電機了,或者是燒電源了 2,有刷電機不好控制力矩,直接控制PWM的占空比就可以了 3,要有正反轉(zhuǎn)控制 4,PI控制就可以了,不需要PID的,可以使用三環(huán)控制,把其中的電流環(huán)換成PWM占空比就可以了,速度環(huán)和位置環(huán)還是要的 5,項目更多的工作量是調(diào)試過程,PID代碼來去就那么點,參數(shù)調(diào)節(jié)才是讓人頭痛的 |
|
沒有用過陀螺儀, 不知道其性能如何, 下面僅供參考: 1. 你PWM的條件條件是什么(一般是占空比), PID的輸出直接和改變量關(guān)聯(lián)自然就能控制PWM, 但是占空比代表什么, 取決于你的電機的控制方法是什么. 1.2. 電機的速度可以通過陀螺儀的變化計算得到, 例如 控制x軸的電機, x軸轉(zhuǎn)動的角度的變化量就是陀螺儀x軸分量上的dθ/dt就是轉(zhuǎn)動速度. 但是這也取決于你的陀螺儀的安裝點與電機軸的機械結(jié)構(gòu)上的相對關(guān)系. 這樣電機的轉(zhuǎn)速就可以得到了, 此轉(zhuǎn)速可以作為PID的反饋輸入. --- 但是我不知道陀螺儀的檢測會不會有很大滯后, 是否適于做為速度反饋, 這個要你自己計算評估. 2. 手的干擾可以認(rèn)為電機負(fù)載發(fā)生變化, 可以通過電路檢測電機的電流得到, 當(dāng)你檢測到電機的負(fù)載變大時, 就加大輸出, 負(fù)載減少時, 就減少輸出, 這樣手一松開, 就會立即相應(yīng)減少輸出, 也就不會突然沖過頭了. 我對陀螺儀也不是很了解, 希望以上對你有方向上的幫助. |
|
1、首先根據(jù)角度反饋確定電機運動方向 2、使用pwm與電機速度關(guān)聯(lián),角度相差越大速度越塊,反之亦然 3、當(dāng)角度相差近似為零時,速度也就接近為零 4、可以先不考慮積分只考慮比例和微分,調(diào)試通過后可以適當(dāng)增加積分或不考慮積分 |
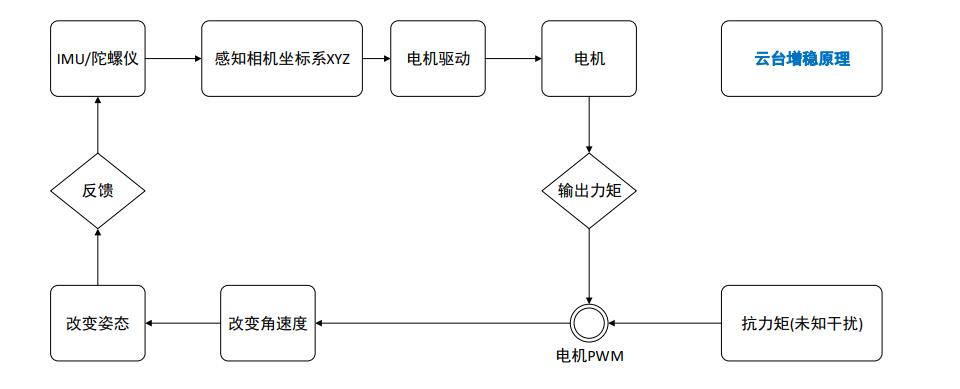
| 我的理解是:1.流程應(yīng)該是:應(yīng)該是獲取角度-》再計算需要修正的參數(shù)-》計算修正參數(shù)需要電機驅(qū)動量-》驅(qū)動電機,姿態(tài)變化-》再獲取角度。2.計算給電機的驅(qū)動參數(shù)時可以使用PID方式,它計算結(jié)果是PWM值,這樣會比較平滑,不用也可以的。3.僅靠陀螺儀很難對準(zhǔn)目標(biāo)啊,應(yīng)該還有其他傳感器吧。 |
| 算法是不是需要加反饋延時程序,反應(yīng)速度和延遲控制 |
Powered by 單片機教程網(wǎng)

 收藏
收藏 頂
頂 踩
踩
