| 具體情況長什么樣啊 |
發表于 2022-4-23 23:26 怎么了?? |
| 太強了 |
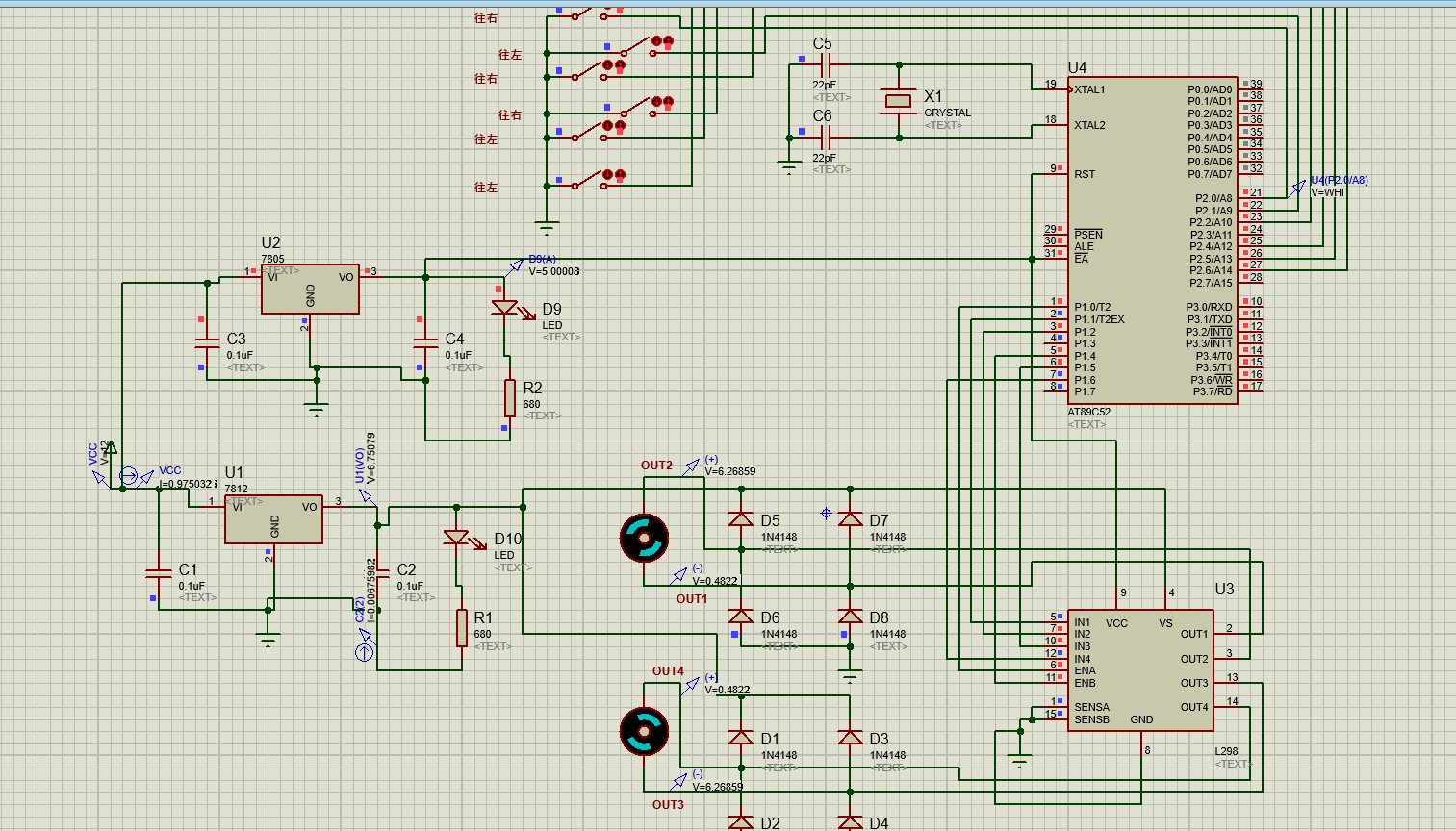
empor 發表于 2020-6-9 10:09 應該是一個六路循跡 |
| 牛逼,水晶雕刻技法 |
empor 發表于 2020-6-9 10:09 我覺得是一個 |
| 這倆個輪胎怎么相反 |
| 這是光電對管循跡的嗎 |
lose2836 發表于 2022-4-22 19:25 我能問你一些問題嗎,你昨天還在,希望你能看見消息 |
請問能有這個程序的注釋講解嗎 |
摸魚怪啊啊 發表于 2021-12-30 13:32 就是我仿真開始是,兩個輪一個是順時針,一個是逆時針轉動 |
zxcvbnm5280 發表于 2021-11-27 15:48 不懂,剛來看見 |
|
這個為什么仿真開始兩個輪胎是相反轉的 |
| 輪胎是怎么來的 能簡單說下嗎? |
| 感謝分享~ |
| 這是幾個尋跡的智能小車啊? |
 收藏
收藏 頂
頂 踩
踩

