|
發布時間: 2019-4-15 18:09
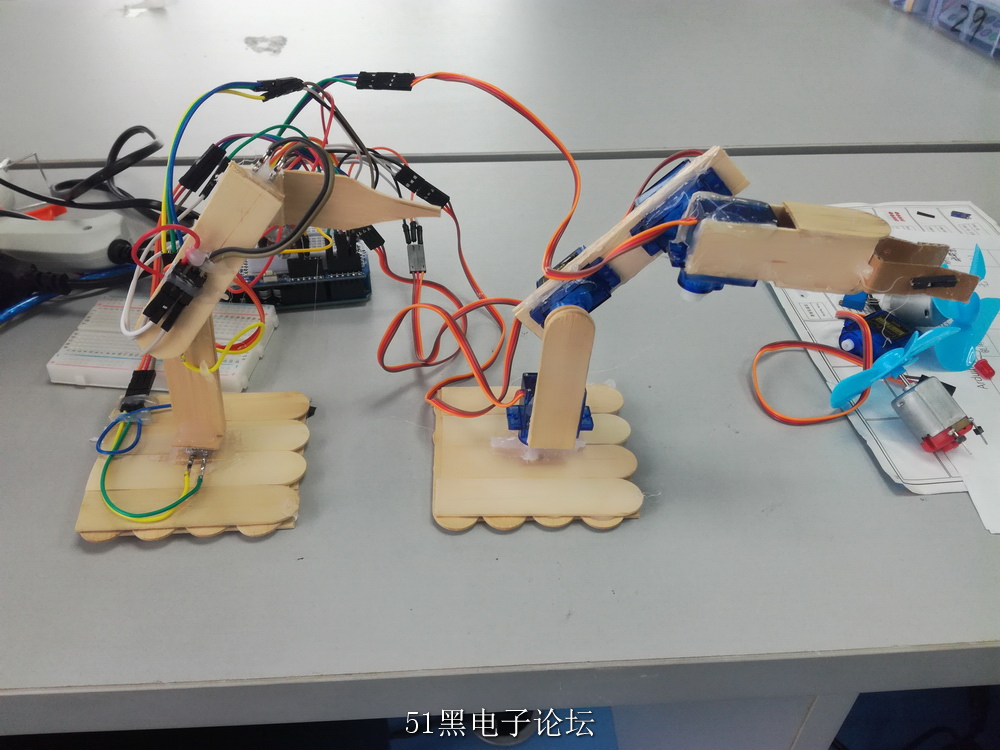
正文摘要:本帖最后由 cj52 于 2019-4-19 00:06 編輯 前段時間在知乎上看到有用Arduino做機械臂的,自己也做了一個來玩玩。 基本原理很簡單,就是電位器(藍白可調電阻)來控制舵機。 制作2個機械臂,從機械臂的關節處用 ... |
|
本帖最后由 cj52 于 2020-1-30 10:52 編輯 有問題的代碼是因為那些數組后面少了下標i,這個論壇的編輯器把i識別成斜體變換了,所以有問題的代碼后面都是斜體,而且i不見了,改動只需要在angle0 angele1等這些數組后面加上方括號,里面再加上i即可 |
半成品,。代碼不全,實驗沒用成功。一動不動 |
|
樓主的電路圖接的是上拉電阻,那boolean playmode = false; //設置運行模式,初始化為學習 和下面的那些模式是不是得改一下? 我改了才可以運行。我是小白,講得不一定對 |
cj52 發表于 2019-4-18 16:04 我編譯的時候也是顯示這個錯誤 |
小白了,技能 發表于 2020-5-27 18:53 因為按鍵就是這樣工作的啊。。你看看我置頂的原理圖就知道了 沒有按的時候是4腳是高電平,讀出來就是1,按了之后4腳接地就是0啊 |
| 大佬你用的按鍵是哪種按鍵, |
|
大佬能加一下你QQ嗎請教按鍵問題,為神魔串口監視器一直讀出來按鍵值是1,一直按著才是0. |
| 樓主好厲害 |
| 好厲害,支持支持 |
熱心市民王先生2 發表于 2020-2-16 18:10 按鍵沒接對哦,要用微動按鍵,你可以把 Serial.println(key_value); 這句加一下。就可以知道你按鍵對不對了。 |
|
初來咋到,請多關照,向大師們致敬! |
cj52 發表于 2020-3-18 13:35 好的,謝謝啦 |
熱心市民王先生2 發表于 2020-3-17 14:46 接線對不對? 滑動變阻器是不是沒有引入AD口?因為藍白可調電阻從最小的阻值到最大的阻值剛好轉了一圈,所以隨動的原理是將藍白可調電阻作為角度傳感器,把它的阻值與旋轉角度對應起來,通過AD采樣電阻上的電壓,就知道大概轉了多少角度,然后把這個角度換算成舵機的PWM值,再去控制舵機,這樣就能隨動了。你可以先自己寫一小段代碼在面包板上測試一下,用一個滑動變阻器來控制一個舵機旋轉,我覺得這個挺有意思的。。可以發散到其他許多地方,比如遠程控制等,你不妨也拓展拓展,做一些有意思的東西,不必拘泥于這一個機械臂。 |
cj52 發表于 2020-1-27 19:02 已經按照你說的添加了下標了,編譯也沒有問題,但現在不按按鍵,舵機根本就不能隨動 |
小張總 發表于 2020-3-2 11:52 沒有呢 |
小張總 發表于 2020-3-2 14:26 哈哈哈 我會回復圖片了 已經回復在一樓 |
小張總 發表于 2020-3-2 14:26 可以啊 但我不知道怎么回復圖片。。。  |
|
建議上傳到優酷,方便觀看 這個操作方式挺新奇的 |
cj52 發表于 2020-1-27 18:37 接線圖可以發一下嗎?請問 |
熱心市民王先生2 發表于 2020-2-16 18:12 你好,請問問題解決了嗎,能分享一下資料嗎? |
| 程序編譯時沒問題了,只是下載到板子里不能隨動,麻煩解答一下,謝謝 |
| up主你好,我把數組名都改了,下載了不能跟著電位計隨動,只能長按按鍵的時候才能隨動,能不能解答一下,謝謝 |
s7club 發表于 2019-10-23 06:18 已經回復在一樓,謝謝 |
cd5566 發表于 2019-9-5 21:19 已經回復在一樓,謝謝 |
彭大偉 發表于 2019-7-19 02:07 問題已經回復在一樓,謝謝 |
lucq7896 發表于 2019-12-15 18:27 已經在一樓回復了 |
|
快一年沒有上到這個論壇了,今天閑來無事登上來才發現這個帖子都有4000多的瀏覽了,有點小激動。看到很多朋友都說有編譯問題,才把這里的代碼復制來測試了一遍找到了問題所在,錯誤的具體原因和改動方法已經回復在一樓了,有需要的朋友可以看看 |
本帖最后由 cj52 于 2020-1-29 16:42 編輯 探索軟件 發表于 2019-4-16 20:00 先跟你道個歉,上次我說測試沒問題是因為我用的是我電腦中的代碼測試,沒有用這里的代碼。快一年沒有上這個論壇了,今天上來發現有很多朋友都說這個問題,我把這里的代碼復制過去編譯,發現確實有問題。不知道怎么從電腦上傳到這里就漏了一些東西,就是數組名后面的下標掉了,錯誤的地方就變成了把數組名(也就是指針)賦給float變量,所以出錯了,改動只需在數組名(angle0,angle1,angle2,angle3)后面加上下標即可 |
weixiao_99 發表于 2019-12-4 19:42 可以啊 |
weixiao_99 發表于 2019-12-4 19:42 改到哪里了?可以把改的地方再發一次嗎?謝謝 |
|
請把改動的發一下嗎? 謝謝 |
|
Arduino:1.8.9 (Windows 7), 開發板:"Arduino/Genuino Uno" The sketch name had to be modified. Sketch names must start with a letter or number, followed by letters, numbers, dashes, dots and underscores. Maximum length is 63 characters. C:\Users\Administrator\Documents\Arduino\jiqibi_xuexi_001\jiqibi_xuexi_001.ino: In function 'void loop()': jiqibi_xuexi_001:63:16: error: cannot convert 'float [30]' to 'float' in assignment temp[0]=angle0; //暫存當前動作角度值 ^ jiqibi_xuexi_001:64:16: error: cannot convert 'float [30]' to 'float' in assignment temp[1]=angle1; ^ jiqibi_xuexi_001:65:16: error: cannot convert 'float [30]' to 'float' in assignment temp[2]=angle2; ^ jiqibi_xuexi_001:66:16: error: cannot convert 'float [30]' to 'float' in assignment temp[3]=angle3; ^ In file included from sketch\jiqibi_xuexi_001.ino.cpp:1:0: jiqibi_xuexi_001:69:32: error: invalid operands of types 'float' and 'float [30]' to binary 'operator-' dif[0] = abs(angle0[j]-angle0); //下一動作與當前動作做差分 ^ D:\A |
| 作者你好請問能私聊問你些事情嗎? |
| 動手能力真強啊,底座感覺太單薄了,保持平衡會有問題 |
彭大偉 發表于 2019-7-19 02:47 改到哪里了?可以把改的地方再發一次嗎?謝謝。。。 |
| 改動的哪里代碼啊 ? |
探索軟件 發表于 2019-4-16 20:00 加我好友qq 1595141562 我剛剛改了一下代碼,就好了。 |
| 數組不能復制 |
| 問題,同一樓編譯出錯 |
 收藏
收藏 頂
頂 踩
踩

