只需一步,快速開始
熱門: 51單片機 | 24小時必答區(qū) | 單片機教程 | 單片機DIY制作 | STM32 | Cortex M3 | 模數(shù)電子 | 電子DIY制作 | 音響/功放 | 拆機樂園 | Arduino | 嵌入式OS | 程序設計
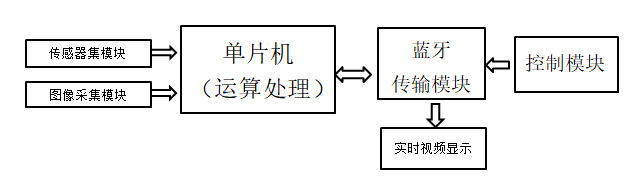
基于上述框圖設計分析,可實現(xiàn)一款集沿垂直墻面或頂層攀爬,具備避障與實時畫面?zhèn)鬏敼δ転橐惑w的多功能搜救機器人設計。各階段具體實施方案如下:1、實現(xiàn)機器人吸附墻壁功能擬使用真空負壓原理,使機器人內(nèi)部產(chǎn)生 ...
小黑屋|51黑電子論壇 | 管理員QQ:125739409;技術交流QQ群281945664
Powered by 單片機教程網(wǎng)

 收藏
收藏 頂
頂 踩
踩
