USB��Universal Serial Bus����һ�N���͵�ͨ�ô��п��������ǿ��ٵġ��p��ġ�ͬ���ġ����ԟ��ܵġ��ӑB(t��i)�B���҃r������Ĵ��нӿڡ����ǻ����@һ���c(di��n)���F(xi��n)�ںܶ��Ӌ(j��)��C(j��)���O(sh��)����USB�ӿڡ��������������@һ����USB�ӿځ��O(sh��)Ӌ(j��)��λ�C(j��)�c��λ�C(j��)ϵ�y(t��ng)֮�g��ͨ�š��������͵�һ��ʽ��(sh��)�֜ضȂ������y���ضȣ���ͨ�^USB�ӿں�Ӌ(j��)��C(j��)�ˑ�(y��ng)��ܛ���M(j��n)��ͨ�š�
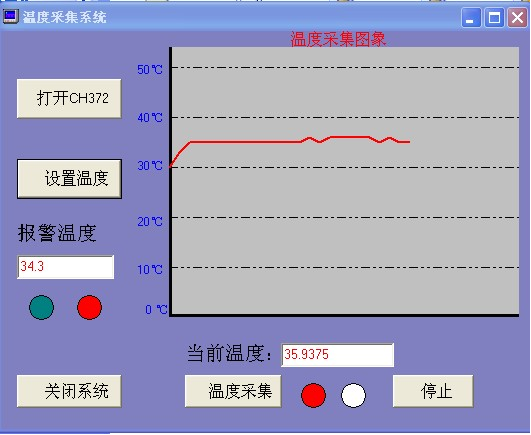
�������Ƚ�B�˱�ϵ�y(t��ng)���P(gu��n)�ı���֪�R�Լ�USB��ͨ�Ņf(xi��)�h���M(j��n)����B�ضȿ��ƵĻ������x���������USB�O(sh��)��оƬCH372��һ��ʽ��(sh��)�֜ضȂ�����DS18B20�͆�Ƭ�C(j��)AT89C51���_�l(f��)����USB�ضȿ���ϵ�y(t��ng)���ɼ��ĜضȔ�(sh��)��(j��)ͨ�^USB�ӿ��ς�����λPC�C(j��)�ϣ������Ñ�(y��ng)��ܛ�������M(j��n)��̎������λ�C(j��)��(y��ng)��ܛ����C ++ builder ���������\(y��n)��CH372�ӿ�оƬ�ĄӑB(t��i)朽ӎ콨������λ�C(j��)����λ�C(j��)֮�g��ͨ�řC(j��)�ơ���λ�C(j��)���ɼ����ĜضȔ�(sh��)��(j��)��PC�C(j��)���@ʾ�����������@ʾ��(sh��)�r�ضȲɼ��D��
���⣬��(y��ng)��ܛ�����Ԍ���λ�C(j��)�M(j��n)�МضȘO���O(sh��)�õȺ��ο��ƹ��ܣ���(d��ng)�ɼ����Ĝضȳ��^ijһ�O(sh��)���O�ޜضȣ��t��ϵ�y(t��ng)�M(j��n)�Ј�������λ�C(j��)߀����ĔU(ku��)չ����һ�����YԴ��
�P(gu��n)�I�~�� AT89C51��USB�f(xi��)�h�� �ضȲɼ� ��һ��ʽ�ضȂ����� ��CH372
Abstract
USB (Universal Serial Bus) is a kind of new Universal Serial Bus, it is a serial bus which is very fast, dual channel, synchronous, can be pulled and plugged with the power on (Hot Swap), can be connected dynamically and very cheap. Because of this characteristic, nowadays, a great many type of computers have USB interface. The project presented in this dissertation used this new USB interface to design the communication between upper computer and down computer system. With the one wire temperature sensor, I measure the temperature and communicate with the computer application through the USB interface.
At the beginning of this dissertation, some basic knowledge about the system and communication protocol of USB (Universal Serial Bus) will be described, and later, introduced the basic meaning of temperature control, This dissertation also brought forward this idea: to develop the temperature control system which is base on the USB, and those tools the system will need are USB device chip CH372, one wire digital temperature sensor DS18B20 and single chip AT89C51.The temperature system got will upload to the upper computer's application through USB interface. The upper computer's application is programmed in the environment of C++ builder; the software I programmed used the DLL (dynamic link library) of CH372 and built the communication system between upper computer and down computer. The upper computer will display the temperature got by the sensor, and display the data on the screen of the PC, and display the temperature acquisition graphics simultaneously.
Besides, the applications on the upper computer can control the down computer to set the temperature limits, things like this, when the temperature exceed a temperature set in advanced, the system will alert. The down computers also keep some resources for future extensions.
Keywords: AT89C51; USB specification; temperature acquisition; one wire temperature sensor; CH372
Ŀ �
���� 1
1 ����֪�R 1
2 ϵ�y(t��ng)���� 2
2.1 ϵ�y(t��ng)������ 2
2.2 ϵ�y(t��ng)�Ĺ��� 2
2.3 ϵ�y(t��ng)�_�l(f��)ƽ�_ 2
3 ϵ�y(t��ng)���w�O(sh��)Ӌ(j��) 3
3.1 ϵ�y(t��ng)���w����D 3
3.2 ϵ�y(t��ng)�������^ 3
3.2.1ϵ�y(t��ng)�ɷN���з��� 3
3.2.2������K�x�� 4
4 ϵ�y(t��ng)Ӳ���O(sh��)Ӌ(j��) 5
4.1 ����̎����----AT89C51 5
4.2 �ضȂ�����DS18B20 8
4.3 �ضȲɼ�ģ�K�·�O(sh��)Ӌ(j��) 13
4.4 ϵ�y(t��ng)�ӿ�ģ�K�·�O(sh��)Ӌ(j��) 15
4.4.1 USB���� 15
4.4.2 USBоƬ�x�� 16
4.4.3 USB�O(sh��)��˽ӿ��O(sh��)Ӌ(j��) 18
4.5 ϵ�y(t��ng)Ӳ�����w��(sh��)�F(xi��n) 20
5 ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��) 20
5.1 ܛ���O(sh��)Ӌ(j��)���� 20
5.2 ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��) 21
5.2.1��λ�C(j��)��ܛ���O(sh��)Ӌ(j��) 21
5.2.2��λ�C(j��)��ܛ���O(sh��)Ӌ(j��) 24
6 ϵ�y(t��ng)�{(di��o)ԇ 25
6.1 Ӳ���{(di��o)ԇ 25
6.2 ܛ���{(di��o)ԇ 26
6.2.1 ��λ�C(j��)��ܛ���{(di��o)ԇ 26
6.2.2 ��λ�C(j��)��ܛ���{(di��o)ԇ 27
6.2.3 ��λ�C(j��)����λ�C(j��)(li��n)�C(j��)�{(di��o)ԇ 28
6.3 ϵ�y(t��ng)����ָ��(bi��o) 29
7 ϵ�y(t��ng)�ĺ��β����f�� 29
8 ���Y(ji��) 29
�x�o 31
�����īI(xi��n) 32
��� 33
����
�ض��ǹ����r(n��ng)�I(y��)���a(ch��n)����Ҫ�h(hu��n)�����أ��������r(n��ng)�I(y��)�����a(ch��n)������Ҫ��Ӱ푣����Ԍ����M(j��n)�М�(zh��n)�_���ٵĜy�����M(j��n)��̎���Ǿ��к��������Ҫ���x���y���ض�ģ�K�Ƿ����_�����١����r�Q�������r(n��ng)�I(y��)���a(ch��n)�Įa(ch��n)Ʒ���|(zh��)���Ƿ�����A(y��)���O(sh��)Ӌ(j��)��Ҫ���ڮ�(d��ng)����������,�|(zh��)������I(y��)����Ļ����������S�����ض�Ҫ��ܸߵĹ����r(n��ng)�I(y��)���a(ch��n)��I(y��)�ќضȜy������ϵ�y(t��ng)��������I(y��)����Ļ�����
���Ј��������漤�ҵĉ�����ǰ����I(y��)�ѽ�(j��ng)���R��Ҫ�������Լ���I(y��)�ĸ����������ͱ�횲����¼��g(sh��)����I(y��)�a(ch��n)Ʒ�M(j��n)���|(zh��)���ȸ�����Ĺ����������ض�Ҫ���(y��n)��Įa(ch��n)Ʒ���y���a(ch��n)Ʒ���a(ch��n)�h(hu��n)���Ĝضȵļ��g(sh��)�Q����ϵ�y(t��ng)�ܷ����沢�^�m(x��)�l(f��)չ�����Ժܶ�I(y��)���a(ch��n)��I(y��)���dz���ҕ�ضȿ���ϵ�y(t��ng)��
���ض��M(j��n)�вɼ������͵�PC�C(j��)��(sh��)�r̎������ǰ�������õ���Ӌ(j��)��C(j��)�Ĵ��нӿڣ����@һ��ʽӋ(j��)��C(j��)�ӿڴ���������ȱ�ݡ�����ӿ�Ҏ(gu��)�y(t��ng)һ���ǹ���ʽ�ӿڡ�ռ���YԴ��ȵ��@���ǘӵ�ȱ�c(di��n)���S��Ӌ(j��)��C(j��)�İl(f��)չ��USB��ͨ�ô��п������ӿ���һ�NӋ(j��)��C(j��)��(y��ng)���I(l��ng)������ͽӿڣ�USB�ӿڵij��F(xi��n)��Ӌ(j��)��C(j��)�˽ӿڵļ��g(sh��)�ش�׃�����������Compaq��Digital Equipment��IBM��Intel��Microsoft ��NEC��Northern Telecom 7�ҹ�˾��1994������ģ���2000�������˸��M(j��n)�������USB2.0�汾���S���@һ�汾�������USBԽ��Խ���У�Ŀǰ���ѽ�(j��ng)�ɞ���һ�N��(bi��o)��(zh��n)�ӿڣ��F(xi��n)���Ј��ϵ�����PC�C(j��)���ٷ�֮��֧��USB�ӿڣ����Č������@һUSB�ӿځ팦�ɼ����ĜضȌ�(sh��)�r��ݔ��
����USB�ӿڵĜضȿ���ϵ�y(t��ng)����ͨ�^�ضȂ��������F(xi��n)���ض��M(j��n)�Мy������������̎��������Ƭ�C(j��)����ͨ�^USB�ӿڌ�(sh��)�r�Ă��oӋ(j��)��C(j��)��Ӌ(j��)��C(j��)����ܛ������(j��)�ѽ�(j��ng)�O(sh��)Ӌ(j��)�õ�Ҫ�����M(j��n)�Ј�����(y��ng)��̎��������Ӌ(j��)��C(j��)���g(sh��)����Ƭ�C(j��)���g(sh��)���ضȂ��������g(sh��)�ĿƼ��a(ch��n)��m���ڹ��I(y��)����Ҫ���ض��M(j��n)�Ќ�(sh��)�r���ľ��_��̎����
1 ����֪�R
��USB�a(ch��n)��֮ǰ�����O(sh��)�cPC�C(j��)��ͨ����Ҫ��ͨ�^PC�C(j��)���������ṩ�ĸ��N�ӿځ�
��(sh��)�F(xi��n)����ISA�ӿڡ�PCI�ӿڡ����нӿڵȣ��@Щ��ʽ�Ľӿڴ������ܶ�ȱ�c(di��n)���ǹ���ʽ�ӿڡ��w�e�ӿ�Ҏ(gu��)�y(t��ng)һ�����Â��y(t��ng)��I/Oģʽ�ȵȡ����˿˷���ʽ�ӿ��@Щȱ�c(di��n)��PC�C(j��)�����̺��Ñ�������Ҫһ�N���͵����O(sh��)�B�ӷ�ʽ���@�rUSB��(y��ng)�\(y��n)����������һ�N���١����١��p��ͬ�������r����֧�֟��ܹ��ܵĴ��нӿڡ�
����1995�꣬���ѽ�(j��ng)��PC�C(j��)����USB�ӿ��ˣ�������ȱ��ܛ����Ӳ���O(sh��)���֧�֣��@ЩPC�C(j��)��USB�ӿڶ��e��δ�á�1998����S��ܛ��Windows 98�Ѓ�(n��i)���ˌ�USB�ӿڵ�֧��ģ�K������USB�O(sh��)����՝u���࣬USB�ӿڲ������M(j��n)�ˌ�(sh��)���A�Ρ�
�@���꣬�S������֧��USB�Ă�����X���ռ���USB�ɞ�PC�C(j��)�Ę�(bi��o)��(zh��n)�ӿ��ѽ�(j��ng)�Ǵ����څ�������C(j��)(host)�ˣ������Ƴ���PC�C(j��)��100%֧��USB���������O(sh��)(device)�ˣ�ʹ��USB�ӿڵ��O(sh��)��Ҳ�c�վ��������电(sh��)�a���C(j��)������x���Α�U���Ŏ���ܛ�(q��)���D���O(sh��)�䡢��ӡ�C(j��)���I�P�����(bi��o)�ȵȡ�����USB���П��Ρ�����ʽ�ӿڡ��y�����㡢��(bi��o)��(zh��n)�y(t��ng)һ�������B�Ӷ����O(sh��)����@�ӵă�(y��u)�c(di��n)����ʹUSB���ڿ��ٵİl(f��)չ��
���Č������@һ����Ӌ(j��)��C(j��)�ӿځ��O(sh��)Ӌ(j��)�ضȿ���ϵ�y(t��ng)��
2 ϵ�y(t��ng)����
����������USB�ӿڵĜضȿ���ϵ�y(t��ng)�ڹ��I(y��)�ϵđ�(y��ng)���M(j��n)�з���������Bϵ�y(t��ng)�����c(di��n)�������Լ�ʹ�õ����_�l(f��)���ߡ�
2.1 ϵ�y(t��ng)������
����ԓϵ�y(t��ng)����USB�ӿڣ����Ծ���USB�Č�(sh��)�r���͔�(sh��)��(j��)���c��λ�C(j��)�M(j��n)����Ϣ����������λ�C(j��)�ֿ����B���ڻ�(li��n)�W(w��ng)�ϣ������h(yu��n)�̵�PC�C(j��)Ҳ�������û�(li��n)�W(w��ng)���ضșz�yϵ�y(t��ng)�M(j��n)�в鿴�ȸ��N������ԓϵ�y(t��ng)�������M(j��n)�ĜضȂ����������Ԍ��ضȿ��ٵ��M(j��n)�з���(y��ng)���ќضȔ�(sh��)��(j��)������λ�C(j��)�M(j��n)�г���̎�픵(sh��)��(j��)���M(j��n)���c��λ�C(j��)ͨ�š����ā��f��ԓϵ�y(t��ng)�������c(di��n)���c(di��n)��
�������ˆT�����h(yu��n)�x���a(ch��n)�h(hu��n)��ͨ�^Ӌ(j��)��C(j��)�����M(j��n)�в鿴̎����
�����c(di��n)�ضȜy����
��ȫ���z�y�ضȣ��������ڛ]�й����ˆT�ą��c�����a(ch��n)�h(hu��n)���M(j��n)�к���̎����
�������a(ch��n)�h(hu��n)���Ĝض��M(j��n)���O(sh��)Ӌ(j��)�O�ޜضȣ�һ�����^�O�ޜضȣ�ϵ�y(t��ng)�������M(j��n)�Ј���ֹͣ���a(ch��n)�h(hu��n)���Ĺ�����
���y���ض��`����^���_����0.5���(n��i)��
2.2 ϵ�y(t��ng)�Ĺ���
ԓϵ�y(t��ng)��Ҫ�����¹��ܣ�
��1�����ض��M(j��n)�Йz�y������ԓϵ�y(t��ng)�����h(yu��n)�x�������a(ch��n)�h(hu��n)������r�£������M(j��n)�МضȜy����
��2�����F(xi��n)���ض��M(j��n)�Ќ�(sh��)�r�ɼ�������PC�C(j��)���@ʾ������
��3����PC�C(j��)�ό�(sh��)�r�����ضȈD�����ˆT����X�ϱ����ֱ�^�ĵõ�ϵ�y(t��ng)�ضȈD��
��4�����ε�ϵ�y(t��ng)���ƣ�ͨ�^Ӌ(j��)��C(j��)�ϵđ�(y��ng)��ܛ�����Ԍ��ض��O(sh��)�ã�һ�����^�O�ޜضȣ��l(f��)�����M(j��n)��֪ͨ�����ˆT���ٵČ����a(ch��n)�F(xi��n)���M(j��n)�и��N����(y��ng)�������@�ӿ��Է�ֹ�ضȳ����O�ޜضȣ�
��5������λ�C(j��)�˵đ�(y��ng)��ܛ�����ṩϵ�y(t��ng)ʹ�Î������Ñ���������ԓ��������ϵ�y(t��ng)�M(j��n)�в�����
2.3 ϵ�y(t��ng)�_�l(f��)ƽ�_
����ϵ�y(t��ng)��Ҫ�õ����_�l(f��)���ߞ飺keil C�� C++ builder��Protel��Ӌ(j��)��C(j��)����������
Keil C��Ŀǰ��������õ�MC-51��Ƭ�C(j��)�ąR����C�Z�Ե��_�l(f��)���ߡ�֧�օR����c�Z���Լ���Ͼ��̡�ͬ�r�߂书��(qi��ng)���ܛ�������Ӳ�����档C++ builder ��Ӌ(j��)��C(j��)���Z��C++���^���õľ��̹��ߣ����nj���һ�N��ҕ����Ӌ(j��)��C(j��)�Z�ԡ� Protel����������õ�Ӳ���·�D�����Ĺ��ߡ�
3 ϵ�y(t��ng)���w�O(sh��)Ӌ(j��)
3.1 ϵ�y(t��ng)���w����D
����(j��)ǰ��ķ�����֪��ϵ�y(t��ng)Ҫ��(sh��)�F(xi��n)���Ϲ��ܣ���������ײ��ֽM�ɣ��ضȲɼ���Ԫ����λ�C(j��)�ضȳ���̎���Ԫ��USB�O(sh��)��ӿڡ���λ�C(j��)��(y��ng)�ó���
ϵ�y(t��ng)�ĽY(ji��)��(g��u)ԭ��D��D3.1��

�D3.1ϵ�y(t��ng)���w��(sh��)�F(xi��n)�ĽY(ji��)��(g��u)ԭ��D
�ضȂ�������Ԫ�����a(ch��n)�ضȭh(hu��n)���M(j��n)�Мy�������y���ضȂ��o��λ�C(j��)����Ƭ�C(j��)������Ƭ�C(j��)���ɼ����Ĝض��M(j��n)�г���̎����̎���˵Ĕ�(sh��)��(j��)ͨ�^USB�ӿ��ς��oPC�C(j��)��λ�C(j��)������λ�C(j��)����(sh��)�r���@ʾ�ɼ����Ĝضȣ����Ҫ���F(xi��n)���h(hu��n)���M(j��n)��̎�����t��λ�C(j��)���l(f��)�������(j��ng)�^USB�ӿڂ��͵���λ�C(j��)����λ�C(j��)����(j��)���ܵ��Ĕ�(sh��)��(j��)�������M(j��n)�з������M(j��n)������̎������ȸ��N������
3.2 ϵ�y(t��ng)�������^
���ڱ�ϵ�y(t��ng)���������x���Ǹ���(j��)�ضȂ��������x��
Ŀǰ�Ј����ЃɷN��������ģ�M�������͔�(sh��)�ּ��ɂ������������x��ͬ�Ă����������в�ͬ�ķ���������o���ɷN��ͬ�ķ������������M(j��n)�з�������K�x������һ�N������
3.2.1ϵ�y(t��ng)�ɷN���з���
����1���x��ģ�M������
���^ģ�M�����������ε��f���ǂ����������y�������|(zh��)�Б�(y��ng)�����S���z�y�IJ�ͬ������ͬ�ķ���(y��ng)�����@һ����(y��ng)����Ҏ(gu��)�ɵģ�������Ҏ(gu��)�ɵ�ݔ��ģ�M��̖�����چ�Ƭ�C(j��)�ǔ�(sh��)����̖ϵ�y(t��ng)��ֻ���R�e��(sh��)����̖�������@�N����Ҫ�����Æ�Ƭ�C(j��)���ض���̖�M(j��n)��̎������회���ģ�Mݔ������(sh��)�ֻ���Ҳ�����fҪ����ݔ����ģ�M늉�������D(zhu��n)�Q�ɔ�(sh��)����̖���@ôһ����ϵ�y(t��ng)Ҫ����ģ�M��̖�D(zhu��n)�Q�ɔ�(sh��)����̖��̎���Ԫ��ͨ������(sh��)�F(xi��n)�@һ���ܵ���A/D�D(zhu��n)�Q�����Ј������@һA/D�D(zhu��n)�Q���в�����͡������x���@һ����Ҳ�ǿ�����Ч�����ٵ��O(sh��)Ӌ(j��)����ϵ�y(t��ng)��
�D3.2�o��ʹ��ģ�M�������@һ�������O(sh��)Ӌ(j��)ԭ��D��

�D3.2 ����1�ĽY(ji��)��(g��u)ԭ��D
����2���x��(sh��)�ւ�����
�����S��Ӌ(j��)��C(j��)���w�ٰl(f��)չ�Լ���Ƭ�C(j��)�������ռ��������M(j��n)���˔�(sh��)�֕r�����˂���̎�����y��̖�r�����뵽������Ϣ̎��������Ƭ�C(j��)��Ӌ(j��)��C(j��)��������ݔ����(sh��)����̖������X̎���Ă������������^�Ĕ�(sh��)�ւ�������
��(sh��)�ւ������ǽ�����ų��F(xi��n)�IJ��õ��V���đ�(y��ng)���ڌ�(sh��)�`��(d��ng)�У����^��(sh��)�ւ��������M(j��n)һ�����v�����nj�ģ�M�������a(ch��n)������̖��(j��ng)�^�Ŵ�A/D�D(zhu��n)�Q�����Ի������V̎����׃�ɼ���Ĕ�(sh��)����̖������ģ�M�������ϼ��딵(sh��)��̎���Ԫ��������(sh��)�ֆ�Ԫ������һ�KоƬ�ϣ�����ݔ�����ǔ�(sh��)����̖�����ڔ�(sh��)��̎��C(j��)����ֱ���M(j��n)��̎����
�D3.3�o�����Ô�(sh��)�ւ������O(sh��)Ӌ(j��)�ķ����D��

�D3.3 ����2�ĽY(ji��)��(g��u)ԭ��D
3.2.2������K�x��
�����ѽ�(j��ng)����˃ɷN���������挦�@���ط����M(j��n)�з�������������x��
�����������������İl(f��)չ���҂�֪����������δ���İl(f��)չ�Ќ��������µķ���l(f��)չ����1����߾��Ȱl(f��)չ���S���Ԅӻ����a(ch��n)�̶ȵIJ�����ߣ�����������Ҫ��Ҳ�ڲ�����ߣ�������Ƴ������`���ȸߡ����_�ȸߡ�푑�(y��ng)�ٶȿ졢���Q�Ժõ����͂������Դ_�����a(ch��n)�Ԅӻ��Ŀɿ��ԡ�Ŀǰ�����a(ch��n)�������f��֮һ���ϵĂ������ďS�Ҟ锵(sh��)���٣���a(ch��n)��Ҳ�h(yu��n)�h(yu��n)���ܝM��Ҫ��2����߿ɿ��ԡ����ضȷ����l(f��)չ���������Ŀɿ���ֱ��Ӱ푵�����O(sh��)��Ŀ��ɔ_�����ܣ����Ƹ߿ɿ��ԡ����ضȷ����Ă��������������Եķ�����ߜضȷ����v���Ǵ��n�}���ւ������乤����������-20�桫70�棬��܊��ϵ�y(t��ng)��Ҫ�����ض���-40�桫85�淶��������܇偠t�Ȉ���Ҫ�������������-20�桫120�棬��ұ���������ȷ��挦�������Ĝض�Ҫ����ߣ���˰l(f��)չ���d���ϣ����մɣ��Ă�����������ǰ;����3�����ͻ��l(f��)չ�����N���ƃx���O(sh��)��Ĺ���Խ��Խ��Ҫ����������w�e��ռλ��ԽСԽ�ã���������������w�eҲ��ԽСԽ�ã��@��Ҫ��l(f��)չ�µIJ��ϼ��ӹ����g(sh��)��Ŀǰ���ù���������Ă������w�e�ѽ�(j��ng)��С������y(t��ng)�ļ��ٶȂ��������������K�͏��ɵ��Ƴɵģ��w�e�^��(w��n)���Բ����Ҳ�̣������ü���ȸ��N��(x��)�ӹ����g(sh��)�ƳɵĹ���ٶȂ������w�e�dz�С�����Q�Կɿ��Զ��^�á���4�������ļ��oԴ���l(f��)չ��������һ�㶼�Ƿ������������D(zhu��n)���������r�x���_�Դ����Ұ��F(xi��n)�����h(yu��n)�x늾W(w��ng)�ĵط�����������늳ع�늻���̫��ܵȹ�늣��_�l(f��)���ĵĂ��������oԴ�������DZ�Ȼ�İl(f��)չ�����@�Ӽȿ��Թ�(ji��)ʡ��Դ�ֿ������ϵ�y(t��ng)������Ŀǰ�����ēp��оƬ�l(f��)չ�ܿ죬��TI2702�\(y��n)��Ŵ������o�B(t��i)����ֻ��1.5mA��������늉�ֻ��2~5V����5�������ܻ���(sh��)�ֻ��l(f��)չ��������һ�㶼�Ƿ������������D(zhu��n)���������r�x���_�Դ����Ұ��F(xi��n)�����h(yu��n)�x늾W(w��ng)�ĵط�����������늳ع�늻���̫��ܵȹ�늣��_�l(f��)���ĵĂ��������oԴ�������DZ�Ȼ�İl(f��)չ�����@�Ӽȿ��Թ�(ji��)ʡ��Դ�ֿ������ϵ�y(t��ng)������Ŀǰ�����ēp��оƬ�l(f��)չ�ܿ죬��TI2702�\(y��n)��Ŵ������o�B(t��i)����ֻ��1.5mA��������늉�ֻ��2~5V��
����ģ�M���������]�а�ģ�M�D(zhu��n)���锵(sh��)��̎���Ԫ������һ�KоƬ�ϣ��@�ӱ؎�����Йz�y��Ԫ���w�e��ȸ��������Ӱ푣����ߣ�ģ�M�D(zhu��n)���ɔ�(sh��)�ֆ�ԪҲ��Ҫ��Ƭ�C(j��)�����M(j��n)��̎�����@�ӕ����M(f��i)�r�g���YԴ�������@��һ���҂�֪����(sh��)�ւ�������δ���،�ȡ��ģ�M�������������S����(sh��)�ւ������İl(f��)չ���F(xi��n)���Ј��ϔ�(sh��)�ւ���Ҳ������ô�F������ϵ�y(t��ng)���ضȾ��ȵ�Ҫ���Ǻܸߣ������x������
4 ϵ�y(t��ng)Ӳ���O(sh��)Ӌ(j��)
4.1 ����̎����----AT89C51
AT89C51������Atmel ��˾���a(ch��n)�ģ���һ�N��4K�ֹ�(ji��)�W�q�ɾ��̿ɲ���ֻ�x�惦����FPEROM��Falsh Programmable and Erasable Read Only Memory���ĵ�늉���������CMOS8λ��Ƭ�C(j��)��ԓ��������ATMEL���ܶȷ���ʧ�惦�����켼�g(sh��)���죬�c���I(y��)��(bi��o)��(zh��n)��MCS-51ָ���ݔ�����_����ݡ����Č���AT89C51��Ƭ�C(j��)�����ν�B��
��1�� AT89C51�����c(di��n)
AT89C51�������ׂ����c(di��n)��
������̎����CPU��
��AT89C51�cMCS-51ϵ�еĆ�Ƭ�C(j��)��ָ��ϵ�y(t��ng)�����_����ȫ���ݣ�
��Ƭ��(n��i)��4k�ֹ�(ji��)�ھ����؏�(f��)���̿��������惦����
��ȫ�o�B(t��i)����,��������:0Hz��24MHz��
����������惦�����ܣ�
��128��8�(n��i)��RAM��
��32λ�p��ݔ��ݔ������
���ɂ�ʮ��λ���r��/Ӌ(j��)��(sh��)��
���傀�Д�Դ,�ɼ��Д���(y��u)�ȼ���
��һ��ȫ�p���Į������пڣ�
��2��AT89C51�ĽY(ji��)��(g��u)�D��D4.1
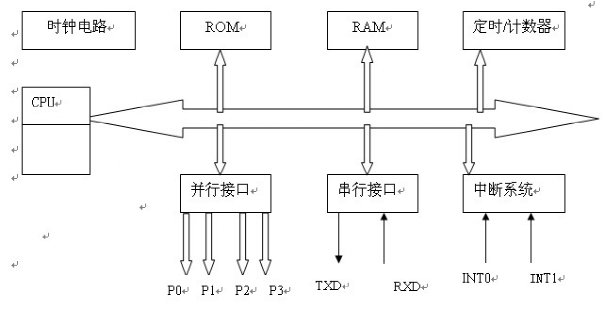
�D4.1 89C51�ĽY(ji��)��(g��u)�D
���ψD��֪��AT89C51��Ҫ��CPU���惦����I/O�˿ڵȎײ��ֽM�ɡ�
��3��AT89C51��������
AT89C51��һ�N�͓p�ġ������ܡ�CMOS��λ̎������Ƭ��(n��i)��4k�ֹ�(ji��)���ھ����؏�(f��)���̡����ٲ������ٌ������Ĵ惦�������؏�(f��)����/����1000�Σ���(sh��)��(j��)����r�g��ʮ�ꡣ���cMCA-51ϵ�І�Ƭ�C(j��)��ָ��ϵ�y(t��ng)�����_����ȫ���ݣ����H����ȫ����MCS-51ϵ�І�Ƭ�C(j��)��������ʹϵ�y(t��ng)�����S��MCS-51ϵ�Юa(ch��n)Ʒ�]�еĹ��ܡ�
AT89C51�ɘ�(g��u)�������Ć�Ƭ�C(j��)��С��(y��ng)��ϵ�y(t��ng)���sСϵ�y(t��ng)�w�e������ϵ�y(t��ng)�Ŀɿ��ԣ�����ϵ�y(t��ng)�ijɱ���ֻҪ�����L��С��4K���Ă�I/O��ȫ���ṩ�o�Ñ�������5V늉�����,���Ҳ����r�g�H��10���룬�H��8751/87C51�IJ����r�g�İٷ�֮һ,�c8751/87C51��12V늉�������ȣ����דp���������]�ЃɷN�Դ��Ҫ�Č��r������оƬ���m���S��Ƕ��ʽ�����I(l��ng)����늉���������2.7V~6V����ȫ�o�B(t��i)�����������l�ʌ���0Hz��24MHz֮�g����8751/87C51��51ϵ�е�6MHz��12MHz�������`����,ϵ�y(t��ng)�ܿ�Ҳ������
AT89C51оƬ�ṩ��������惦�����ܣ��ṩ�˷����`����ɿ���Ӳ�����ֶΣ�����ȫ���C�����ϵ�y(t��ng)�������ơ�P0�������B(t��i)�p���,ͨ�Q��(sh��)��(j��)������,��?y��n)�ֻ��ԓ����ֱ�����ڌ��ⲿ�惦�����x/��������
��4��AT89C51���_���ܼ��f��
�D4.2��AT89C51�����_

�D4.2
�ٿھ���P0��P1��P2��P3�ڡ�
P0�������B(t��i)�p��ڣ�ͨ�Q��(sh��)��(j��)�����ڣ���һ��8λ©���_·�p��I/O�ڣ�ÿ�_������8TTL�T�������(d��ng)P1�ڵĹ��_��һ�Ό�1�r�������x�����ݔ�롣P0�܉������ⲿ����(sh��)��(j��)�惦���������Ա����x�锵(sh��)��(j��)/��ַ�ĵڰ�λ����FIASH���̕r��P0 ������ԭ�aݔ��ڣ���(d��ng)FIASH�M(j��n)��У�(y��n)�r��P0ݔ��ԭ�a���˕rP0�ⲿ��횱����ߡ���?y��n)�ֻ��ԓ����ֱ�����ڌ��ⲿ�惦�����x/��������P0��Ҳ����ݔ���ⲿ�惦���ĵ�8λ��ַ�������Ƿ֕rݔ��,�ʑ�(y��ng)���ⲿ���i�������˵�ַ��(sh��)��(j��)�i�棬��ַ�i����̖��ALE��
P1���nj��T���Ñ�ʹ�õ�I/O��,�ǜ�(zh��n)�p��ڡ�P1����һ����(n��i)���ṩ��������8λ�p��I/O�ڣ�P1�ھ��_���ܽ���ݔ��4TTL�T�����
P2���Ǐ�ϵ�y(t��ng)�U(ku��)չ�r����8λ��ַ���á����U(ku��)չ�ⲿ�惦���r,P2��Ҳ���������Ñ�I/O�ھ�ʹ��,P2��Ҳ�ǜ�(zh��n)�p��ڡ�
P3�����p���ܿ�,ԓ�ڵ�ÿһλ���ɪ�(d��)���ض��x���һI/O���ܻ�ڶ����ܡ������һ����ʹ�Õr����ͬP1�ڡ�P3�ڵĵڶ��������4.1��ʾ��
�ڿ��ƿھ�:PSEN(Ƭ���xȡ����)��ALE(��ַ�i�����)��EA(Ƭ��惦���x��)��RESET(��(f��)λ����);
���Դ���r犣�VCC��VSS��XTAL1��XTAL2������������
��4.1 P3�ڵĵڶ�����

�ܲ�������
����惦�����ܡ�AT89C51оƬ����惦��������Ӳ������,�܉���Ч�ر��Cϵ�y(t��ng)�������ƺ�ܛ��������(f��)��,���ܵȼ��O(sh��)��Ҋ���2��
����ģʽ��AT89C51���gЪ�͵�늃ɷN����ģʽ���gЪģʽ����ܛ�����O(sh��)�õ�,��(d��ng)���������Ȼ̎�ڹ�����B(t��i)�r,CPU�ɸ���(j��)������r�m�r���M(j��n)��˯�ߠ�B(t��i),��(n��i)��RAM����������ļĴ���ֵ�����ֲ�׃���@�N��B(t��i)�ɱ��κ�һ���Д����Kֹ��ͨ�^Ӳ����(f��)λ��
���ģʽ��VCC늉������Դ����,��ʎ��ֹͣ���,CPUֹͣ��(zh��)��ָ�ԓоƬ��(n��i)RAM������ܼĴ���ֵ���ֲ�׃,ֱ�����ģʽ���Kֹ��ֻ��VCC늉��֏�(f��)����������������������ʎ����(w��n)����ʎ��,ͨ�^Ӳ����(f��)λ���ģʽ�ɱ��Kֹ��
4.2 �ضȂ�����DS18B20
�ضȂ�������ԓϵ�y(t��ng)�Ĝy���������ضȂ������ĺÉ�ֱ��Ӱ푵��y���Y(ji��)�������Ա��Č����ضȂ��������x��Ԕ��(x��)��B������(j��)�����O(sh��)Ӌ(j��)Փ�ĵ�Ҫ��������Ҫ��ȣ���(j��ng)�^���������ěQ���x��(sh��)�֜ضȂ�����DSB8B20�����挢�o���B��
��1�� DS18B20�ĸ���
DS18B20��DALLAS��˾���a(ch��n)��һ��ʽ��(sh��)�֜ضȂ�����������3���_TO��92С�w�e���b��ʽ���ضȜy�������飭55�桫��125��,�ɾ��̞�9λ��12λA/D�D(zhu��n)�Q���ȣ��y�طֱ��ʿ��_(d��)0.0625�棬���y�h(hu��n)���Ĝض��÷�̖�U(ku��)չ��16λ��(sh��)������ʽ����ݔ�����乤���Դ�ȿ����h(yu��n)�����룬Ҳ�ɲ��ü����Դ��ʽ�a(ch��n)��������DS18B20���Բ�(li��n)��3����2�����ϣ�CPUֻ��һ���˿ھ������c�T��DS18B20ͨ�ţ�ռ��̎�����Ķ˿��^�٣��ɹ�(ji��)ʡ������������߉�·���������c(di��n)ʹDS18B20�dz��m�����h(yu��n)���x���c(di��n)�ضșz�yϵ�y(t��ng)��
��2��DS18B20�ă�(n��i)���Y(ji��)��(g��u)
�D4.3��DS18B20�ă�(n��i)���Y(ji��)��(g��u)�D

�D4.3 DS18B20�ă�(n��i)���Y(ji��)��(g��u)
�ɈD��֪��DS18B20��Ҫ��4���ֽM�ɣ�64λROM���ضȂ��������Ǔ]�l(f��)�Ĝ�
���|�l(f��)��TH��TL�����üĴ�����DS18B20�Ĺ��_������D4.4��ʾ��

�D4.4 DS18B20���_����
DS18B20��3�����_�f�����£�
DQ�锵(sh��)����̖ݔ�룯ݔ���ˡ���©�O�_·һ���ӿڡ�Ҳ�ڼ����Դ�Ӿ���ʽ�r���o�O(sh��)���ṩ�Դ��
GND���Դ�ء�
VDD����ӹ���Դݔ��ˣ��ڼ����Դ�Ӿ���ʽ�r�ӵأ���
DS18B20��64λROM�������O(sh��)���Ψһ���дa����DS18B20�ĵ�ַ���дa��ÿһ��DS18B20�ĵ�ַ���дa�Dz�ͬ�ģ��@�ӾͿ��Ԍ�(sh��)�F(xi��n)һ�������ϒ�Ӷ���DS18B20�������W�棨scratchpad������2���ֹ�(ji��)�ĜضȼĴ����������˜ضȂ������Ĕ�(sh��)��ݔ����ԓ�W��߀�ṩ�ˌ����ޣ�TH�������ޣ�TL���ij���(bi��o)�Ĵ��������üĴ�����һ���ֹ�(ji��)�����L����TH��TL�����üĴ�����EEPROM������ϵ�y(t��ng)��늕r���Ա��攵(sh��)��(j��)��
DS18B20����DALLAS�Ćο������ƅf(xi��)�h����(sh��)�F(xi��n)�����Æξ�������̖�ڿ������M(j��n)��ͨ�š��������е��O(sh��)��ͨ�^©�O�_·�ˣ�DQ�_���B�ڿ����ϣ����ƾ���Ҫһ����s5K������衣���@һ��������ϵ�y(t��ng)�У�������ͨ�^Ψһ��64λ��ַ���дa�R�e���L�������ϵ����������ڵ�ַ���дa��ͬ�������B���ڿ����ϵ�DS18B20�����f�ǟo�� ��
��3��DS18B20�ļĴ���
DS18B20�惦���M���Y(ji��)��(g��u)���4.2��ʾ��
��4.2 �惦���ĽM���D
�����W�棨��늠�B(t��i)��
| �ֹ�(ji��)0 | �ضȵ��ֹ�(ji��) |
| �ֹ�(ji��)1 | �ضȸ��ֹ�(ji��) |
| �ֹ�(ji��)2 | �ߜ؈��Ñ��ֹ�(ji��)��1�� |
| �ֹ�(ji��)3 | �͜؈��Ñ��ֹ�(ji��)��2�� |
| �ֹ�(ji��)4 | ���üĴ��� |
| �ֹ�(ji��)5 | ������FFH�� |
| �ֹ�(ji��)6 | ������0CH�� |
| �ֹ�(ji��)7 | ������10H�� |
| �ֹ�(ji��)8 | CRCУ�(y��n) |
�ֹ�(ji��)0���ֹ�(ji��)1�քe�����ضȼĴ�����LSB��MSB���@Щ�ֹ�(ji��)��ֻ�x�ģ��ֹ�(ji��)2���ֹ�(ji��)3�ṩ��TH�����ވ��|�l(f��)�Ĵ�������TL�����ވ��|�l(f��)�Ĵ��������L�����ֹ�(ji��)4�����üĴ攵(sh��)��(j��)���ֹ�(ji��)5��6��7������������(n��i)��ʹ�ã����ܱ��Č�����(d��ng)�x�r���@Щ�ֹ�(ji��)����ȫ1ֵ���ֹ�(ji��)8��ֻ�x�ģ������ֹ�(ji��)0���ֹ�(ji��)��CRCУ�(y��n)��
�����W��ĵ��Ă��ֹ�(ji��)�������üĴ�������M���Y(ji��)��(g��u)���±�4.3��ʾ��
��4.3 ���üĴ���
Bit7 bit6 bit5 bit4 bit3 bit2 bit1 bit0
| 0 | R0 | R1 | 1 | 1 | 1 | 1 | 1 |
��4.4 �y�طֱ�������
| R1 | R1 | �ֱ��� | ����D(zhu��n)�Q�r�g |
| 0 | 0 | 9bit | 93.75ms |
| 0 | 1 | 10bit | 187.5ms |
| 1 | 0 | 11bit | 375ms |
| 1 | 1 | 12bit | 750ms |
��4��DS18B20���x���r��
�L��DS18B20��������£�
----��ʼ����
----ROM����������κ���Ҫ�Ĕ�(sh��)��(j��)���Q����
----DS18B20�ĺ���(sh��)����������κ���Ҫ�Ĕ�(sh��)��(j��)���Q����
ÿһ���L��DS18B20�r���Ҫ�����@һ���������е��κ�һ�����Eȱ�ٻ��y��DS18B20������푑�(y��ng)��
�ٳ�ʼ���r��
��ʼ���r����D4.5��

�D4.5 DS18B20��ʼ���r��
�����cDS18B20��ͨ�Ŷ�Ҫ���ȳ�ʼ�����Ķ������M(j��n)����һ���Ĺ������������l(f��)����(f��)λ�}�_��DS18B20�Դ����}�_푑�(y��ng)���D4.5�o������������(d��ng)DS18B20�l(f��)�������}�_����(f��)λ푑�(y��ng)�r����ָʾ������ԓDS18B20�ѽ�(j��ng)�ڿ����ϲ���(zh��n)��ò�����
���x/���r��
�������ڌ��r��(sh��)��(j��)��DS18B20�����x�r���DS18B20���x��(sh��)��(j��)��ÿһ�������r�����һ����(sh��)��(j��)λ��
�x/���r��Ҋ�D4.6

��a�����r��

��b���x�r��
�D4.6 DS18B20�����r��D
�ی��r��
�ЃɷN��͵Č��r��1�r��͌�0�r�������Ì���1���r��?q��)�߉�?�� ��DS18B20���Ì���0���r��?q��)�߉�?����DS18B20�����Ќ��r���횳��m(x��)60��s��ÿһ�����r��֮�g���Ҫ������1��s�Ļ֏�(f��)�r�g���ɷN��͵Č��r�Ŀ������ѿ��������_ʼ��
��a(ch��n)������1���ĕr���ڌ���������֮���������������15��s��(n��i)ጷſ���������ጷź�5K��������茢�����ƽ̧�ߡ���a(ch��n)������0���r���ڿ������ͺ������������r���(n��i)��횳��m(x��)���ƿ�������ƽ������60��s����
DS18B20�ڿ������l(f��)�����r����15-60��s�ĕr�g��(n��i)�ɘӿ���������ڲɘӴ������g������ߣ���1���ͱ�����DS18B20������ڲɘӴ������g����ƽ���t��0���ͱ�����DS18B20��
���x�r��
��(d��ng)�����l(f��)���x�r��r��DS18B20���l(f��)�͔�(sh��)��(j��)���������������x�r���횳��m(x��)����60��s��ÿһ���x�r��֮�g���������1��s�Ļ֏�(f��)�r�g���x�r��Ŀ����O(sh��)�䌢������������1��s��ጷſ����_ʼ�������������x�r���DS18B20�_ʼ�ڿ����ς��͡�1�����ߡ� 0����DS18B20ͨ�^���ֿ�����߰l(f��)�͡�1�������������Ͱl(f��)�͡�0�����l(f��)�͡�0���r��DS18B20��60��s�rጷſ����� �l(f��)�͡�1�� �r�����������������ƽ���e��B(t��i)����DS18B20ݔ���Ĕ�(sh��)��(j��)�چ��ӕr����½��غ�15��s��Ч����ˣ�����������ڕr���_ʼ��15��s��(n��i)ጷſ�����Ȼ��ɘӿ�����B(t��i)��
ͨ�^�x/���r���������l(f��)�����������DS18B20�M(j��n)���x��������
��5��DS18B20�ij�������
��SKIP ROM [CCH]
�������������@һ����ͬ�r�L�������ϵ������O(sh��)�������Ҫ�l(f��)��ROM���дa��Ϣ������������ʹ�����ϵ�����DS18B20ͬ�r�M(j��n)�Мض��D(zhu��n)�Q��
��SEARCH ROM [F0]
��(d��ng)ϵ�y(t��ng)�_ʼ��늕r������������R�e���������ЏęC(j��)��ROM���дa���Դ_���ęC(j��)�Ĕ�(sh��)Ŀ����������͡���������Ҫ��(zh��)�� search ROMѭ�h(hu��n)����β����R�e���еď��O(sh��)�䡣���ֻ��һ���Č��O(sh��)���ڿ����ϣ���ʹ�ú��ε�Read ROM�����ڴ�Search ROM��ÿһ��Search ROM����֮���횷��ص���(w��)���еIJ��E����ʼ������
��READ ROM[33]
�@һ����ֻ���ڿ�����ֻ��һ���O(sh��)��ĕr��ʹ�ã���ʹ�ÿ��������Բ���Search ROM����Ϳ����x���ęC(j��)��64λROM���дa����(d��ng)����һ���ęC(j��)�O(sh��)���ڿ����ϕr�����߀ʹ��ԓ����������е��O(sh��)����D푑�(y��ng)ԓ�O(sh��)�䣬�@�ӌ��a(ch��n)����(sh��)��(j��)�_ͻ��
��CONVRTT [44]
�@һ�����_ʼһ�Μض��D(zhu��n)�Q��׃�Q֮��(sh��)��(j��)�����ڕ�������2���ֹ�(ji��)�ضȼĴ����У�DS18B20�ص����Ŀ��e��B(t��i)������O(sh��)�乤���ڼĴ�늉�ģʽ���t�@һ����l(f��)�ͺ�10��s֮��(n��i)������׃�Q���g����������ڿ������܉����^��(qi��ng)�����������DS18B20���ⲿ�Դ��늣���ôConvert T�������������l(f��)���x�r������ض�׃�Q�����M(j��n)�У���ô���ء�0��������ѽ�(j��ng)�ꮅ���t���ء�1����
��WRITE SCTATCHPAD [4EH]
�@һ����ʹ�ÿ��������Ԍ�3���ֹ�(ji��)��(sh��)��(j��)��DS18B20�ļĴ����С���һ�ֹ�(ji��)��(sh��)��(j��)
��TH�Ĵ����У��ڶ��ֹ�(ji��)����TL�У���3�ֹ�(ji��)�������üĴ����С���(sh��)��(j��)�������Чλ�Ȱl(f��)�͡�����3�ֹ�(ji��)����ڿ������l(f��)����(f��)λ���ߔ�(sh��)��(j��)�Gʧ֮ǰ���ꡣ
��READ SCRTCHPAD[BEH]
�@һ����ʹ�ÿ����������x�Ĵ����ă�(n��i)�ݡ���(sh��)��(j��)�����_ʼ���ֹ�(ji��)0�����λ��ֱ���Ĵ����ĵ�9�ֹ�(ji��)���x�����κΕr�����ֻ�貿�ּĴ�����(sh��)��(j��)�����������ԽY(ji��)���x������
�����ѽ�(j��ng)��B�˔�(sh��)�֜ضȂ�������ԭ�������挢����DS18B20�O(sh��)Ӌ(j��)�ضȲɼ�ģ�K�·��
4.3 �ضȲɼ�ģ�K�·�O(sh��)Ӌ(j��)
�����ѽ�(j��ng)��B��AT89C51�͔�(sh��)�֜ضȂ�����DS18B20����֪�R�����挢�����������O(sh��)Ӌ(j��)��ϵ�y(t��ng)�ĜضȲɼ��·��DS18B20�B�ӵ���Ƭ�C(j��)�ķ����ܺ��Σ����ЃɷN�����B�ӵ��·�ϣ�������Դ��ʽ�ͼ����Դ��ʽ���@��ʹ�õ���ϵ�y(t��ng)�ṩ������Դ��ʽ���������ü����Դ��ֻҪVCC��DQ��GND�B�ӵ���Ƭ�C(j��)���Դ���O��һ��I/O�˿ڡ��Դ�ؾͿ����ˡ�����Ҫע�������DQ��(sh��)��(j��)����Ҫ��һ��4.7K��������裬�@һ���DZ��Ҫ�ӵģ��oՓ���ǽ���P1��߀��P0�ڣ��@�c(di��n)�eע�⣬�e���ѡ�֮�����Դ�ɶ�֮�g�ӂ�0.01U����ݣ��@�ӵ�������Ҫ�ǞV����
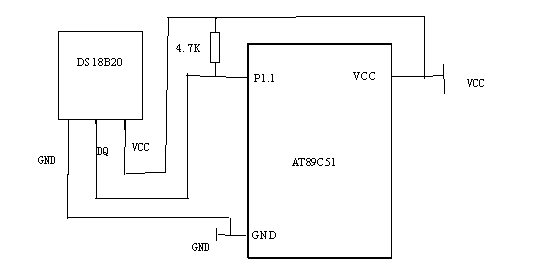
�D4.7 ��Ƭ�C(j��)��DS18B20�ӿڈD
�ɈD4.7��֪DS18B20�������ⲿ�Դ��늷�ʽ����Ƭ�C(j��)���ò���P1.1���cDS18B20ͨ�š��������(j��)��Ƭ�C(j��)�ij�ʼ���r����x���r����DS18B20�͆�Ƭ�C(j��)֮�g���x���������@��ֻ�o�˜ضȵ��xȡ����λ�C(j��)���ֳ����ڸ���нo����
�@���e���ѵ���DS18B20���r��Ҫ��ܸߣ�����Ҫ��ܸߣ����Գ�����ӕr���Ƿ����x��(sh��)��(j��)�dz��P(gu��n)�I�����á�
DS18B20�x����(sh��)��(j��)�������£�
void delaym(int time) //�ӕr��(time*2+2)us
{ int s;
for(s=0;s<time; s++)
}
void write_bite(unit8 bite) //��һλ��(sh��)��(j��)λ
{ DQ=0;
if(bite==1)
DQ=1; //�����"1",DQ=1;
delaym(29);//�ӕr60us�ṩDS18B20�ɘ�
DQ=1; //ጷ�DQ
}
unit8 read_bite(void) //�xһλ��(sh��)��(j��)λ
{ DQ=0; //������DQ�����_ʼ�x�r��
delaym(0); //�ӕr2us
DQ=1; //ጷ�DQ;
delaym(1); //�ӕr4us�����x��(sh��)��(j��)
return(DQ);
}
void write_byte(unit8 dat) //��һ�ֹ�(ji��)��(sh��)��(j��)
{ unit8 i;
unit8 temp;
for(i=0;i<8;i++)
{ temp=dat>>1; //����һλ
temp&=0x01;
write_bite(temp);
}
}
unit8 read_byte(void)
{ unit8 i,value=0;
for(i=0;i<8;i++)
{ if(read_bite())
value|=0x01<<i;//�xһ�ֹ�(ji��)��(sh��)��(j��)��һ���x�r���xһλ��������λ
delaym(29) ; //�ӕr60us��������xһλ��֮�����x��һλ
}
return(value);
}
unit8 DS18B20_RESET(void)
{ unit8 data;
DQ=0;
delaym(239); //����DQ��480us
DQ=1;
delaym(35);
da=DQ;
delaym(211);
return (data);//��оƬ��(y��ng)��data=0,�o�tdata=1
}
4.4 ϵ�y(t��ng)�ӿ�ģ�K�·�O(sh��)Ӌ(j��)
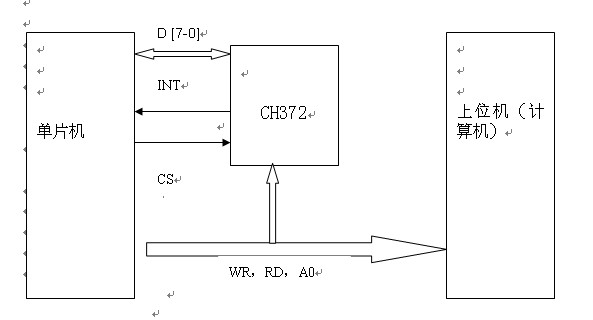
��ϵ�y(t��ng)�IJɼ�ģ�K�ɼ�����(sh��)��(j��)���Ҫ��(j��ng)�^CH372������λ�C(j��)��(y��ng)��ܛ�����܌�(sh��)�F(xi��n)������λ�C(j��)�ĸ��N��������CH372��USB�ӿ�оƬ����λ�C(j��)����λ�C(j��)ͨ�ŵ�Ҫͨ�^CH372�ӿ�оƬ����ɣ����Ӌ(j��)��C(j��)���B�Ӻܺ��Σ������@һ������Ҫ��Ӳ����(sh��)�F(xi��n)��CH372�͆�Ƭ�C(j��)AT89C51���B�ӆ��}��
4.4.1 USB����
USB��Universal Serial Bus��������O(sh��)���cӋ(j��)��C(j��)�M(j��n)���B�ӵ����ͽӿڣ���һ�N���͵�ͨ�ô��Ϳ����ӿڣ�USB���м��弴�á����ܡ��ӿ��w�eС����(ji��)ʡϵ�y(t��ng)�YԴ����ݔ�ɿ����ṩ�Դ�����õļ����ԡ�����ԇͨ�ŵȃ�(y��u)�c(di��n)��
��USB�a(ch��n)��֮ǰ���ⲿ�O(sh��)���Ӌ(j��)��C(j��)��ͨ����Ҫ��ͨ�^Ӌ(j��)��C(j��)�������ṩ�ĸ��N�ӿڣ�����ISA�ӿڡ�PCI�ӿڡ�PS/2�ӿڡ����нӿڣ����нӿڵȣ��@Щ�ӿڣ������@���ǘӵ�ȱ�ݣ�����ӿ�Ҏ(gu��)�y(t��ng)һ���������Ȟ��˿˷���������O(sh��)���ȱ�ݣ�P�����̺��Ñ�������Ҫһ�N���͵����O(sh��)�ӿڣ�USB�������@�ӵĭh(hu��n)���®a(ch��n)���ģ�����һ�N���١��p��ͬ�������r����֧�֟��ܹ��ܵĴ��нӿڡ�
USB��һ�N���͵Ľӿڣ���ô���ض�������ͨ�Ř�(bi��o)��(zh��n)��Ҳ�����҂����f�ąf(xi��)�h�����溆�ν�BUSB��ͨ�Ņf(xi��)�h��
һ��ģ����K���Ñ������USBϵ�y(t��ng)��USB�O(sh��)���B�ӵ����C(j��)�ĺ����B�ӣ������_���ˆT���f���@���B�ӿɷ֞������ӴΣ����܌ӡ�USB�O(sh��)��ӡ�USB�����ӿڌӣ���ÿһ�Ӷ������C(j��)��USB�O(sh��)��IJ�ͬ����ģ�K�M�ɡ�����������ĈD�́����ݡ��D4.8���@�N��ͨ�řC(j��)�Ƶĺ�����

�D4.8 USBͨ�ŌӴ�ģ��
�ɈD��һ��USB�O(sh��)������������ģ�K�M�ɣ�USB�����ӿڡ�USB߉�O(sh��)�䡢���܆�Ԫ��USB�����ӿ���USB�O(sh��)���еĴ������棨SIE����USB߉��Ԫ��������һ�����c(di��n)�ļ��ϣ����܆�Ԫ�͑�ܛ���������ӿڵļ��ϡ�
USB��ݔ��Ͱ���������ݔ��ͬ����ݔ���Д���ݔ�Ϳ��Ƃ�ݔ��ÿ�N��ݔ��͵Ă�ݔ�ٶȡ��ɿ����Լ���(y��ng)�÷�������ͬ�����Ƃ�ݔ�ɿ�������ߵģ����ٶ�������ͬ����ݔ�ٶȿ죬�M�㌍(sh��)�r�ԣ����ɿ��Ե͡��ھ��w��(y��ng)���У����c(di��n)��ݔ��Ϳɸ���(j��)��ݔ�ٶȺͿɿ����x��
��USBͨ�Ņf(xi��)�h�У����C(j��)ȡ�ý^�����ә�(qu��n)�����O(sh��)��ֻ���ǡ� �������¡���ͨ�^һ���������ʽ���O(sh��)��Ո�����ͨ�š�USB�O(sh��)��Ո�������(bi��o)��(zh��n)Ո�S��Ո����O(sh��)���Ո���O(sh��)���ö�e�ǘ�(bi��o)��(zh��n)Ո��������ɵģ��S��Ո�����Ñ����x��Ո���O(sh��)���Ո�����ض���USB�O(sh��)��l(f��)����Ո�����纣���������ӡ�C(j��)�HID���˙C(j��)�ӿڣ���̼��������O(sh��)��Ո������ѭһ���ĸ�ʽ������Ո����͡��O(sh��)��Ո��ֵ���������L�ȡ�
4.4.2 USBоƬ�x��
USB�Ă�ݔ�ٶȿɷ֞���٣�1.5Mbps����ȫ��(12Mbps)���٣�480Mb/s��,����ݔ�ٶȁ��֣����x���USBоƬ�����Ҫ�У����٣�1.5Mbps����ȫ��(12Mbps)�����x��Philips��˾��PDIUSBD12��Cypress��˾��EZ-USB2100ϵ���Լ����a(ch��n)��CH372оƬ�� ���٣�480Mbps�����xPhilips��˾��ISP1581��Cypress��˾��USB�ӿ�оƬCY7C68013��
����ϵ�y(t��ng)Ҫ��ݔ?sh��)����ʱ��^�٣����������x��ȫ�ٵ�USB�ӿ�оƬ�����ڇ��a(ch��n)��оƬ�ѽ�(j��ng)�������D(zhu��n)���ټ����Y�ϱ��^�Rȫ���@��ϵ�y(t��ng)�O(sh��)Ӌ(j��)���x���USB�ӿ�оƬ�LJ��a(ch��n)оƬCH372��
оƬ��B��
CH372���Ͼ��ߺ��������˾���a(ch��n)������USB�ӿ�оƬ������8λ��(sh��)��(j��)�������x������Ƭ�x���ƾ��Լ��Д�ݔ�������Է���ؒ�ӵ���Ƭ�C(j��)/DSP/MCU/MPU�ȿ�������ϵ�y(t��ng)�����ϣ���������USBͨ�Ņf(xi��)�h���Ñ�����]���漰�����_�ţ���ôֻҪ�˽�оƬ����ͨ�÷��Ϳ��Կ��ٵ��O(sh��)Ӌ(j��)USB�O(sh��)�䡣����CH372�M(j��n)��USB�O(sh��)���ͨ���O(sh��)Ӌ(j��)�������µķ���D4.9
�D4.9 CH372�͆�Ƭ�C(j��)����B��
����o��CH372�����_�D���D4.10�����������
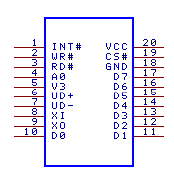
�D4.10 CH372���_
CH372оƬռ�Ãɂ���ַλ����(d��ng)A0 ���_����ƽ�r�x������˿ڣ����Ԍ��������(d��ng)A0���_����ƽ�r�x��(sh��)��(j��)�˿ڣ������x����(sh��)��(j��)����Ƭ�C(j��)ͨ�^8 λ���пڌ�CH372 оƬ�M(j��n)���x�������в���������һ������a�����ɂ�ݔ�딵(sh��)��(j��)�����ɂ�ݔ����(sh��)��(j��)�M�ɣ����������Ҫݔ�딵(sh��)��(j��)����������]��ݔ����(sh��)��(j��)������������E���£�
����A0=1 �r������˿ڌ���������a��
�����ԓ�������ݔ�딵(sh��)��(j��)���t��A0=0 �r���Ό���ݔ�딵(sh��)��(j��)��ÿ��һ���ֹ�(ji��)��
�����ԓ�������ݔ����(sh��)��(j��)���t��A0=0 �r�����xȡݔ����(sh��)��(j��)��ÿ��һ���ֹ�(ji��)��
��������ɣ����ԕ�ͣ�����D(zhu��n)�����^�m(x��)��(zh��)����һ�����
CH372���������4.5��
�� 4.5 CH372����
| ���a | �������Q | ݔ�딵(sh��)��(j��) | ݔ����(sh��)��(j��) | ������; |
| 05H | RESET_ALL |
| ����40mS�� | ��(zh��)��Ӳ����(f��)λ |
| 06H | CHECK_EXIST | ���┵(sh��)��(j��) | ��λȡ�� | �yԇ������B(t��i) |
| 12H
| SET_USB_ID
| VID �ֹ�(ji��) PID �ֹ�(ji��) |
| �O(sh��)��USB�ďS��VID��PID |
| 15H
| SET_USB_MODE | ģʽ���a | ����20uS�� ������B(t��i) | �O(sh��)��USB����ģʽ |
| 22H | GET_STATUS |
| �Д��B(t��i) | �@ȡ�Д��B(t��i)��ȡ��Ո�� |
| 28H
| RD_USB_DATA
|
|
| �Į�(d��ng)ǰUSB�Д�Ķ��c(di��n)���_�^(q��)�xȡ��(sh��)��(j��)�K��ጷŮ�(d��ng)ǰ���_�^(q��) |
| 2AH
| WR_USB_DATA5
|
|
| ��USB���c(di��n)1���ς����_�^(q��)���딵(sh��)��(j��)�K |
| 2BH
| WR_USB_DATA7
|
|
| ��USB���c(di��n)2���ς����_�^(q��)���딵(sh��)��(j��)�K |
4.4.3 USB�O(sh��)��˵Ľӿ��O(sh��)Ӌ(j��)
CH372оƬ�ڱ��ض��ṩ��ͨ�õı��Ӳ��нӿڣ�������8λ�p��(sh��)��(j��)����D7��D0���x�xͨݔ�����_RD#�����xͨݔ�����_WR#��Ƭ�xݔ�����_CS#���Д�ݔ�����_INT#�Լ���ַݔ�����_A0��ͨ�^���Ӳ��нӿڣ�CH372 оƬ���Ժܷ���ؒ�ӵ����N8λ��Ƭ�C(j��)��DSP��MCU ��ϵ�y(t��ng)�����ϣ����ҿ����c��������������档CH372оƬ��RD#��WR#���Էքe�B�ӵ���Ƭ�C(j��)���x�xͨݔ�����_�͌��xͨݔ�����_��CS#�ɵ�ַ�g�a�·�(q��)�ӣ����ڮ�(d��ng)��Ƭ�C(j��)���ж�����������r�M(j��n)���O(sh��)���x��INT#ݔ�����Д�Ո���ǵ��ƽ��Ч�������B�ӵ���Ƭ�C(j��)���Д�ݔ�����_������ͨI/O ���_����Ƭ�C(j��)����ʹ���Дʽ���߲�ԃ��ʽ�@֪�Д�Ո��(d��ng)WR#����ƽ����CS#��RD#��A0 ������ƽ�r��CH372 �еĔ�(sh��)��(j��)ͨ�^D7��D0ݔ������(d��ng)RD#����ƽ����CS#��WR#��A0 ������ƽ�r��D7��D0�ϵĔ�(sh��)��(j��)������CH372 оƬ�У���(d��ng)RD#����ƽ����CS#��WR#������ƽ��A1 ����ƽ�r��D7��D0 �ϵĔ�(sh��)��(j��)����������a����CH372оƬ�С�CH372 оƬ��VD+��VD-���_��(y��ng)ԓֱ���B�ӵ�USB �����ϡ��������оƬ��ȫ�����ӱ��U������늸У���ô��ֱ����Ч��(li��n)��葪(y��ng)ԓ��5��֮��(n��i)��
USB���x���ķN��ݔ��ͣ����Ƃ�ݔ�����ݔ���Д���ݔ��ͬ����ݔ���Ͼ��ߺ㹫˾��USB�ӿ�оƬCH372֧�ֿ��Ƃ�ݔ��������ݔ���Д���ݔ��CH372��Ҫ�ЃɷN��(sh��)��(j��)����ݔ��ʽ������(sh��)��(j��)����ʽ��Ո��(y��ng)��ʽ������Ո��(y��ng)��ʽ���E���£�
�� Ӌ(j��)��C(j��)��(y��ng)�ÌӰ����ȼs���ĸ�ʽ����(sh��)��(j��)Ո��l(f��)�ͽoCH372оƬ��
�� CH372 оƬ���Дʽ֪ͨ��Ƭ�C(j��)��
�� ��Ƭ�C(j��)�M(j��n)���Д����(w��)���@ȡCH372���Д��B(t��i)��������
�� ������ς����tጷŮ�(d��ng)ǰUSB ���_�^(q��)��Ȼ���˳��Д����
�� ����������t�Ĕ�(sh��)��(j��)�����_�^(q��)���xȡ��(sh��)��(j��)�K��
�� �������յ��Ĕ�(sh��)��(j��)�K����(zh��n)�䑪(y��ng)��(sh��)��(j��)��Ҳ�������˳��Д������̎����
�� ��Ƭ�C(j��)����(y��ng)��(sh��)��(j��)�����������c(di��n)���ς����_�^(q��)�У�Ȼ���˳��Д����
�� CH372 оƬ����(y��ng)��(sh��)��(j��)���ؽoӋ(j��)��C(j��)��
�� Ӌ(j��)��C(j��)��(y��ng)�Ìӽ��յ���(y��ng)��(sh��)��(j��)��
�@�N��ݔ��ʽ�DZ���Ҫ��Ӌ(j��)��C(j��)��l(f��)��푑�(y��ng)�ſ����M(j��n)�еġ��ڱ���ϵ�y(t��ng)�O(sh��)Ӌ(j��)�У�����ͨ�^��Ӌ(j��)��C(j��)�l(f��)�������λ�C(j��)����(j��)������M(j��n)�и��N�����������O(sh��)Ӌ(j��)�ضȣ��ɼ��ضȵȡ�
����ϵ�y(t��ng)����Ҫ��ô��I/O�ڣ����Ա���ϵ�y(t��ng)�O(sh��)Ӌ(j��)�Ć�Ƭ�C(j��)�˲���Ҫ�U(ku��)չ��ֱ���ö�Ƭ�C(j��)��I/O�˿ڣ�ֵ��ע�����MCU���U(ku��)չ����ôP0ֻ�ܿ�ֻ������I/O��ʹ�ã����������锵(sh��)��(j��)/��ַ�˿ڏ�(f��)�á��@һ�c(di��n)���ע�⣬��P0������ͨI/Oʹ�ñ���Ҫ���������1K��10K���ҡ���tϵ�y(t��ng)���o���\(y��n)�У��@�c(di��n)�e����Ҫע��ĵط���
��KCH372�c��Ƭ�C(j��)AT89C51֮�g���B�ӈD�����D4.11

4.11 CH372��89C51���B�ӈD
�D��P2����CH372оƬ8λ�p��(sh��)��(j��)����ͨ�Ŷ˿ځ�ʹ�á�P1��P0�˿�������ͨ��I/O�ڣ�USB ��������һ��5V �Դ����һ����D+��D-����(sh��)��(j��)��̖����ͨ����+5V �Դ���Ǽtɫ���ӵؾ��Ǻ�ɫ��D+��̖���ǾGɫ��D-��̖���ǰ�ɫ��USB �����ṩ���Դ����������_(d��)��500mA��һ����r�£����ĵ�USB �a(ch��n)Ʒ����ֱ��ʹ��USB �����ṩ��5V �Դ�����USB �a(ch��n)Ʒͨ�^������늷�ʽ�ṩ�����Դ����ôCH372 ��(y��ng)ԓ�c��Ƭ�C(j��)һ��ʹ��ԓ�����Դ���Ҕ��_USB�������Դ�������Ҫͬ�rʹ��USB �������Դ����ô����ͨ�^��ֵ�s��1�������R1 �B��USB ������5V �Դ���cUSB �a(ch��n)Ʒ��5V �����Դ�����҃��ߵĽӵؾ�ֱ�����B�ӡ�
CH372 ��CS#�̶�����ƽ��һֱ̎��Ƭ�x��B(t��i)���چ�Ƭ�C(j��)�����У����Կ��Ƹ���I/O���_ģ�M���ڕr���cCH372 �M(j��n)�Д�(sh��)��(j��)���Q���������P05��P06��P07���x�������
�D4.11�У����x���R2 �������Դ��늺�늽����C5 �е���ܼ��rጷŵ���ʹVCC ���r�½���0V���_�����´�ͨ늕rCH372 �܉�ɿ�����늏�(f��)λ�����C3 ����CH372 ��(n��i)���Դ��(ji��)�c(di��n)���C3 ��������0.01��F �Ī�(d��)ʯ����l��Ƭ��ݣ������EMI �]��Ҫ����ô����ʡ��C3�����C4��C5�����ⲿ�Դ���C4 ��������0.1��F�Ī�(d��)ʯ����l��Ƭ��ݡ����wX1�����C1 ��C2 ����CH372�ĕr���ʎ�·��X1���l����12MHz��C1��C2��������15pF-30pF �Ī�(d��)ʯ����l��Ƭ��ݡ�
����ϵ�y(t��ng)�O(sh��)Ӌ(j��)��USB�ӿ�Ӳ���O(sh��)Ӌ(j��)�ѽ�(j��ng)��ɡ����ґ�(y��ng)�ò��ֵ�Ӳ���O(sh��)Ӌ(j��)Ҳ�ѽ�(j��ng)��ɣ��¹�(ji��)���o�����wӲ���O(sh��)Ӌ(j��)���·�D��
4.5 ϵ�y(t��ng)Ӳ�����w��(sh��)�F(xi��n)
��λ�C(j��)�đ�(y��ng)�ò�����DS18B20��DS18B20�ɼ����ض���̖�����D(zhu��n)�Q�ɔ�(sh��)����̖Ȼ��ݔ������Ƭ�C(j��)AT89C51����Ƭ�C(j��)����(sh��)����̖�M(j��n)��̎����Ȼ��̎���Ĕ�(sh��)��(j��)ͨ�^USB�ӿ�оƬ������λ�C(j��)��USB�O(sh��)���(q��)�ӳ�����λ�C(j��)����USB�����(q��)�ӳ�����܁���USB�O(sh��)���(q��)�ӳ���Ĕ�(sh��)��(j��)����Ӌ(j��)��C(j��)�˵đ�(y��ng)��ܛ���M(j��n)�и��N��������֮��Ӌ(j��)��C(j��)�Ŀ�������ͨ�^USB�����ӿڣ��ѿ�������ͨ�^USBоƬ������Ƭ�C(j��)�����ڱ�ϵ�y(t��ng)�ѽ�(j��ng)��Ӌ(j��)��C(j��)���������a�^�����Ԇ�Ƭ�C(j��)���܁�����λ�C(j��)��������M(j��n)���Д࣬�Ķ�������ͬ��푑�(y��ng)��
Ӳ���·���w��(sh��)�F(xi��n)�·�D�ڸ����нo����
5 ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)
��ϵ�y(t��ng)�M(j��n)��ܛ���O(sh��)Ӌ(j��)������λ�C(j��)ܛ���O(sh��)Ӌ(j��)����λ�C(j��)ܛ���O(sh��)Ӌ(j��)����λ�C(j��)ܛ���O(sh��)Ӌ(j��)����ʹ�ÅR���Z�Ժ͆�Ƭ�C(j��)C�Z�ԣ���λ�C(j��)�O(sh��)Ӌ(j��)���Բ��õĺܶ�Ӌ(j��)��C(j��)���Z�ԣ�����VC++��Delphi��C++ builder�ȣ����@���x��C++ builder��������λ�C(j��)����������λ�C(j��)������Ҫ�ЅR���Z�ԡ�PL/M�Z�Ժ�C�Z�ԡ��R���Z���Ј�(zh��)��Ч�ʸߡ��ٶȿ졢�cӲ���Y(ji��)�Ͼo�ܵ����c(di��n)��������I/O�˿ڹ���r��ʹ�ÅR���Z���п�ݡ�ֱ�^�ă�(y��u)�c(di��n)������ʹ�ÅR���Z�������ڸ��Z�ԣ������Ƭ�C(j��)C�Z�ԁ��v���y��Ҫ��ܶ࣬���҅R���Z�ԵijʬF(xi��n)���x�Ե͡��_���Բ������λ�C(j��)�ij����O(sh��)Ӌ(j��)�x���Ƭ�C(j��)C�Z�ԡ����溆�ν�B����ܛ���O(sh��)Ӌ(j��)�ľ��̹��ߡ�
5.1 ܛ���O(sh��)Ӌ(j��)�_�l(f��)����
Keil C51�dž�Ƭ�C(j��)�ľ���ܛ����������Keil Software��˾��Ʒ��51ϵ�м��݆�Ƭ�C(j��)C�Z��ܛ���_�l(f��)ϵ�y(t��ng)���c�R����ȣ�C�Z���ڹ����ϡ��Y(ji��)��(g��u)�ԡ����x�ԡ��ɾS�o(h��)���������@�ă�(y��u)�ݣ�����W(xu��)���á����^�R���Z�Ժ���ʹ��C���_�l(f��)���w��������̡� Keil C51ܛ���ṩ�S���Ď캯��(sh��)����(qi��ng)��ļ����_�l(f��)�{(di��o)ԇ���ߣ�ȫWindows���档������Ҫ��һ�c(di��n)��ֻҪ��һ�¾��g�����ɵąR�����a�������w����Keil C51���ɵ�Ŀ��(bi��o)���aЧ�ʷdz�֮�ߣ�����(sh��)�Z�����ɵąR�����a�ܾo�����������⡣���_�l(f��)����ܛ���r�����w�F(xi��n)���Z�Եă�(y��u)�ݡ�
C++ builder��Inprise��˾1998 ���Ƴ��ģ�����?q��)���?2λWindows�����O(sh��)Ӌ(j��)�_�Ź��ߣ�C++ builder���H�^����Delphiʹ�ú��㡢����(qi��ng)��Ч�ʸߵ����c(di��n)��������߀�Y(ji��)����C++�Z�Ե����Ѓ�(y��u)�c(di��n)�� C++ builder�����f�������ֹ�����(qi��ng)������W(xu��)��Windows�_�l(f��)����֮һ��C++ builder 6���зdz��Ѻõļ����_�l(f��)�h(hu��n)�����ṩһ�ٶ���VCL�M����ʹ�_�l(f��)�ˆT����Ҫ̫��ĕr�g���a�����܌�(sh��)�F(xi��n)�ܶ���(f��)�s�Ĺ��ܡ����ľ��g�� �܉��Ԅ��г�VCL�M���Č��Ժͷ���������T�x�������ֹ�ݔ���(f��)�s�Ĵ��a����ʽ��?y��n)��@Щ��(y��u)�c(di��n)�����Ա���ϵ�y(t��ng)�O(sh��)Ӌ(j��)�x�� C++ builder������λ�C(j��)ܛ���O(sh��)Ӌ(j��)���_�l(f��)���ߡ�
5.2 ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)
ϵ�y(t��ng)Ҫ���ض��M(j��n)�вɼ������ȱ��������λ�C(j��)����λ�C(j��)����Ƭ�C(j��)���l(f��)�������Ƭ�C(j��)����(j��)���յ����������(j��)�A(y��)�ȵ�Ҏ(gu��)�t����ͬ������������ͬ��̎����Ȼ���̎���Y(ji��)���l(f��)����λ�C(j��)����λ�C(j��)���յ��ضȔ�(sh��)��(j��)����(j��)�ضȔ�(sh��)��(j��)������(sh��)��(j��)�ɼ��D���@����ϵ�y(t��ng)Ҫ��(sh��)�F(xi��n)���ܣ�����(j��)�@һҪ���O(sh��)Ӌ(j��)��ϵ�y(t��ng)��ܛ����
ϵ�y(t��ng)���wģ�K���̈D��D5.1
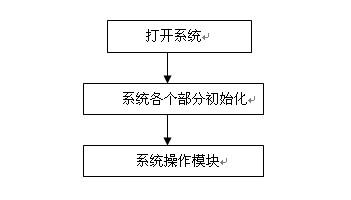
�D5.1 ϵ�y(t��ng)���wģ�K�D
����քe�O(sh��)Ӌ(j��)��λ�C(j��)����λ�C(j��)�ij������̈D��
5.2.1��λ�C(j��)��ܛ���O(sh��)Ӌ(j��)
��Ƭ�C(j��)�˵đ�(y��ng)�ó�����Ҫ��(sh��)�F(xi��n)�Ĺ��ܾ��nj�DS18B20�M(j��n)�вɼ��ضȣ��Ѳɼ����Ĝض�ͨ�^USB�ӿ�оƬ�ς���Ӌ(j��)��C(j��)�˵đ�(y��ng)�ó���
��λ�C(j��)�ij����O(sh��)Ӌ(j��)���̈D5.2


�D5.2 ��λ�C(j��)�ij����O(sh��)Ӌ(j��)���̈D
��λ�C(j��)�ij������̈D�а�����Ƭ�C(j��)��DS18B20�͆�Ƭ�C(j��)��ͨ�����̈D���Լ���Ƭ�C(j��)��USB�O(sh��)��ӿ�оƬ��ͨ�����̈D��
����DS18B20�͆�Ƭ�C(j��)��ͨ�����̈D���D5.3
�@���dž�Ƭ�C(j��)��θ���(j��)DS18B20�����ԁ����������M(j��n)�Мض��D(zhu��n)�Q�����xȡ�ضȡ��ќضȔ�(sh��)��(j��)�����چ�Ƭ�C(j��)�ˡ�

�D5.3 DS18B20�ij������̈D
��Ƭ�C(j��)�ȳ�ʼ��DS18B20�ضȂ������������(f��)λ��Ȼ��DS18B20�ĕr����x�����DS18B20����(j��)�����M(j��n)�в�������Ƭ�C(j��)��DS18B20��ͨ���^����Ҫ�飺��Ƭ�C(j��)��DS18B20��(f��)λ�����^�x��ϵ��̖��������0xCC���DS18B20�������Ӝض��D(zhu��n)�Q���ٴΏ�(f��)λ�����x�ض�����0xBE���x���ضȡ��@���dž�Ƭ�C(j��)��DS18B20��ͨ���^�̣����õ��ĜضȆ�Ƭ�C(j��)���M(j��n)��̎�����ќضȔ�(sh��)��(j��)������λ�C(j��)����λ�C(j��)��(sh��)�r�@ʾ�ض�ֵ�����˱����f��DS18B20�͆�Ƭ�C(j��)�g��ͨ���^�̣�����o���x��DS18B20�ضȵij���
unsigned int readtemperature(void) //�x�ض�
{ unit8 a=0,b=0;
unit8 c,d;
unsigned int t=0;
float tt=0;
c=DS18B20_RESET();
write_byte(0xCC); // ���^�x��̖��̖�IJ���
write_byte(0x44); // ���Ӝض��D(zhu��n)�Q
d=DS18B20_RESET();
write_byte(0xCC); //���^�x��̖��̖�IJ���
write_byte(0xBE); //�xȡ�ضȼĴ�����ǰ�ɂ����ǜض�
a=read_byte();
b=read_byte();
t=b;
t<<=8;
t=t|a;
return(t); }
��Ƭ�C(j��)�x���ضȺ����Ĺ������dž�Ƭ�C(j��)��CH372оƬ��ͨ�š�CH372�ѽ�(j��ng)������USBͨӍ�f(xi��)�h������ֻҪ֪��CH372��Ƭ�C(j��)֮�g��ͨ���^�̣��ͺܷ���Č���������ͨ�����̈D���D5.4��CH372��89C51�ij������̈D��
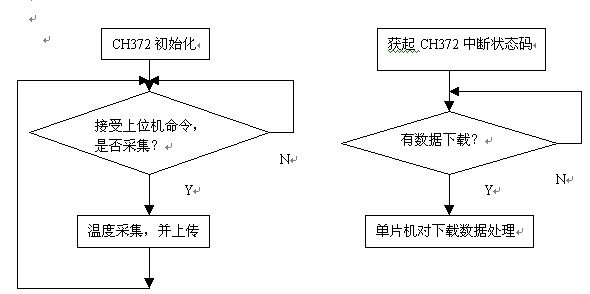
��1����Ƭ�C(j��)��CH372�ς���(sh��)��(j��) ��2�� ���d��(sh��)��(j��)����Ƭ�C(j��)
�D5.4 ��Ƭ�C(j��)��CH372��ͨ�����̈D
�ς���(sh��)��(j��)��ͨ�^��ԃDS18B2�Ƿ��D(zhu��n)�Q�꣬�D(zhu��n)�Q�꣬�t�ς�����t�ȴ�����λ�C(j��)�đ�(y��ng)��ܛ������λ�C(j��)�l(f��)�͔�(sh��)��(j��)��CH372�Ķ��c(di��n)���������܁�������Ӌ(j��)��C(j��)�Ĕ�(sh��)��(j��)��ͨ�^�Д���֪ͨ��Ƭ�C(j��)����Ƭ�C(j��)�_ʼ�����Փ�(j��)�����M(j��n)��̎����
5.2.2 ��λ�C(j��)ܛ���O(sh��)Ӌ(j��)
��λ�C(j��)���܁�����λ�C(j��)�Ĕ�(sh��)��(j��)������(j��)��(sh��)��(j��)�M(j��n)�в�������(sh��)�F(xi��n)���N���ܡ���һ�c(di��n)���Ҫע����ǣ�Ҫ���ÄӑB(t��i)�B�ӎ��֪�R�����ܴ��_USB�O(sh��)�䣬�Ķ��M(j��n)��ͨ�ţ������ھ�����(y��ng)��ܛ��ǰ��һ��Ҫ�˽�C++ builder �ӑB(t��i)�B�ӎ��ʹ�á�����CH372�(q��)�ӳ����ṩ�ĄӑB(t��i)�B�ӎ�����VC�����ģ�C++ builderҪ������PC�C(j��)��CH372��ͨ�ţ����Ҫʹ��VC�����ĄӑB(t��i)�B�ӎ죬��C++ builder����ֱ��ʹ��VC�����ĄӑB(t��i)�B�ӎ졣�P(gu��n)���@�c(di��n)�����{(di��o)ԇ�����������f�����@��ֻ��B��λ�C(j��)ܛ�����w�O(sh��)Ӌ(j��)����ă�(n��i)�ݡ�
����o����λ�C(j��)�ij������̈D5.5��

�D5.5 ��λ�C(j��)���̈D
�@������λ�C(j��)ܛ�����O(sh��)Ӌ(j��)˼�룬���w��(sh��)�F(xi��n)�ڳ������Ќ��M(j��n)һ���f����
6 ϵ�y(t��ng)�{(di��o)ԇ
ǰ����¹�(ji��)���ѽ�(j��ng)������ϵ�y(t��ng)�M(j��n)�����O(sh��)Ӌ(j��)�����nj���Ӳ�����f���@ֻ�����һ���ֵĹ��� ��Ӳ��ϵ�y(t��ng)����������(zh��n)�����{(di��o)ԇ���ܶ���r�£��·�D������Փ�����_�ģ����Ԍ�(sh��)�F(xi��n)�ģ����������ĵ��ˌ�(sh��)�H�У������F(xi��n)�ܶ���r����������ô�ӣ���Ҫ��һ�c(di��n)�ǽY(ji��)���O(sh��)Ӌ(j��)��Փ֪�R������ϵ�y(t��ng)�����{(di��o)ԇϵ�y(t��ng)��
6.1 Ӳ���{(di��o)ԇ
ϵ�y(t��ng)Ӳ���·�����Ǻ�(f��)�s�����{(di��o)ԇ�б���Ҫע�������c(di��n)����t�������F(xi��n)ϵ�y(t��ng)��������(w��n)����r����(y��n)�ص�Ԓ����CH372оƬ���ģ��@���·�e��Ҫ�ĵط�������o��Ӳ���{(di��o)ʽ�������Ć��}���������ν�Q��
��1��CH372��WR��RD��A0��̖�����Ɇ�Ƭ�C(j��)89C51��P0���ṩ�ģ�P0������I/O��ʹ�ã����Ҫ��������裬�ܶ��Y�ό�����1K-10K��������裬���@���ڱ�ϵ�y(t��ng)�Dz����_�ġ�
��(sh��)�H���ڱ�ϵ�y(t��ng)��P0�ڵ�����F������30K-125K������x��100K��������衣��?y��n)����ֻ�?0K����ô����CH372��оƬ�������500uA���h(yu��n)�h(yu��n)���^��оƬҎ(gu��)����������160uA���@�ӿ϶�������оƬ�������@���������ķ�����һ��Ҫ����(j��)оƬ�ą���(sh��)���O(sh��)Ӌ(j��)�������������Y�����f���x��1K-10K���@�c(di��n)Ҫ�eע�⡣
��2����CH372�ĞV�����0.1uF�У���(li��n)һ��5K-10K����衣�@�ӵ�������ϵ�y(t��ng)�ڔ�늕r��������е���ܼ��r��ጷŵ���ʹVCC���r���½���0V���_���·��ʹ��ͨ늕rCH372�܉����늏�(f��)λ��
��������@����裬������r�£�һ����λ�C(j��)ͨ늣�оƬ�ܾò��@ʾ��������λ�C(j��)��Ҫ�^�Õr�g���_�J(r��n)�ӿ�оƬ�����ԑ�(y��ng)ԓ��5K-10K����裬�@��ϵ�y(t��ng)��һ�����M(j��n)��
��3�����þ����}��USB�ӿ�оƬCH372�͆�Ƭ�C(j��)��Ҫ��Ҫ������ܹ�������CH372�ľ�������12M����Ƭ�C(j��)���Ժ�CH372����ͬһ������������12M���@�ӵă�(y��u)�c(di��n)�ǿ��Թ�(ji��)�s���ϣ����Dz�����PCB�Ű棬߀�������оƬ���ˣ�Ҳ�������X����Dz���CH372�ģ�߀�dž�Ƭ�C(j��)���ˣ������@��]��Ƭ�C(j��)��CH372���ܹ��þ�����Ӳ���{(di��o)ԇ��
��4��DS18B20�Ľӷ���DS18B20�B�ӵ���Ƭ�C(j��)�Ľӷ��ܺ��Σ��@�������Ҫע���һ�c(di��n)�ǣ�DS18B20����P11��ͨ�Ŷ˿ڣ�����횽�4.7K��������衣P1����I/O�����(q��)���ⲿ�·�r,һ�㶼���ý��������ģ����@����Ҫ������衣�@һ�c(di��n)Ҳ��Ҫע�⡣��tDS18B20��������(w��n)�����п����иɔ_��
����ϵ�y(t��ng)�{(di��o)ԇӲ����Ҫ���F(xi��n)�Ć��}�����������ᵽ�ģ�ֻҪ����(j��)��Փ���������C�ό�(sh��)�H��(y��ng)�ã�������������_��Ӳ�����@�Ӟ����ܛ���{(di��o)ԇ�p�ٺܶ��韩����t������ܛ���{(di��o)ԇ�ĕr���F(xi��n)���}�п�����ܛ�����}��������Ӳ�����}���������̎����ܲ����㣬�軨�ܶ��r�g��
6.2 ܛ���{(di��o)ԇ
��ϵ�y(t��ng)��ܛ���{(di��o)ԇ��Ҫ����λ�C(j��)�˵�ܛ���{(di��o)ԇ����λ�C(j��)�˵�ܛ���{(di��o)ԇ��
6.2.1 ��λ�C(j��)��ܛ���{(di��o)ԇ
��λ�C(j��)��ܛ���{(di��o)ԇ��Ҫ�փɲ��֣���Ƭ�C(j��)��CH372Z�r�g��ͨ�š���Ƭ�C(j��)�c�ضȂ�����DS18B20��ͨ�š�
��1����Ƭ�C(j��)��CH372֮�g��ͨ��
�@һ�����DZ������Ҫ�{(di��o)ԇ�����ģ� ��?y��n)�Ҫ�����@һ����ͨ�^Ӌ(j��)��C(j��)�����@ʾ����Ƭ�C(j��)�͜ضȂ�����֮�g��ͨ�š�
Ӳ���������þ�����������P0������CH372��WR��RD��A0��������ͨ�^ܛ������P0����̖���_(d��)������CH372���x��������x����(sh��)��(j��)��ֻҪע��CH372���x���r�gҪ��Ϳ��Ժܿ쌍(sh��)�F(xi��n)����Ƭ�C(j��)��P2��������CH372�Ĕ�(sh��)��(j��)�ڣ����������l(f��)�ͺͽ���CH372�Ĕ�(sh��)��(j��)��
�@���e��(qi��ng)�{(di��o)��һ�c(di��n)��CH372�ij�ʼ�����������ʼ�����ɹ�����X�o���R�eӲ�������ڌ��o���M(j��n)�С����Գ�ʼ��������ע���һ�c(di��n)������o��CH372�ij�ʼ������
#define VID 0x8888 //�S��ID
#difine PID 0x9999 //�a(ch��n)ƷID
CH372_Init() //��ʼ��CH372
{ int i;
CH372_WR_CMD_PORT(CMD_SET_USB_ID); //�O(sh��)��USB�O(sh��)��VID��PID
CH372_WR_DATA_PORT(VID&0xff); //����S��ID�ĵ��ֹ�(ji��)
CH372_WR_DATA_PORT(VID>>8); //����S��ID�ĸ��ֹ�(ji��)
CH372_WR_DATA_PORT(PID&0xff); //����a(ch��n)ƷID�ĵ��ֹ�(ji��)
CH372_WR_DATA_PORT(PID>>8); //����a(ch��n)ƷID�ĸ��ֹ�(ji��)
CH372_WR_CMD_PORT(CMD_SET_USB_MODE); //�O(sh��)��CH372����ģʽ
CH372_WR_DATA_PORT(2);//����ģʽ2
for( i=200;i>0;i--) //20us�r�g��(f��)λ
if (CH372_RD_DATA_PORT==CMD_RET_SUCCESS) //��(f��)λ�ɹ�
break;
}
���⣬CH372�����Ԃ���64���ֹ�(ji��)��ÿһ���x������(sh��)ÿһ�β�����ֻ��һ���ֹ�(ji��)��Ҫ�x�������ֹ�(ji��)���@��ʹ�õ���ѭ�h(hu��n)�ķ�����
CH372��ʼ���ɹ�����λ�C(j��)�B�ӵ�PC�C(j��)�ϣ����b��CH372�(q��)�ӳ����PC�C(j��)�Ϳ����R�eӲ��������@���ֹ���֮�����M(j��n)���Ϟ�C(j��)����λ�C(j��)(li��n)�ϵ��{(di��o)ԇ,Ȼ�����{(di��o)ԇDS18B20��DS18B20֮�g��ͨ�š�
��2����Ƭ�C(j��)��DS18B20֮�g��ͨ��
��Ƭ�C(j��)Ҫ����(j��)DS18B20�ĕr��Ҫ����x��Ҫ����xȡ�ضȔ�(sh��)��(j��)������DS18B20��һ��ʽ��(sh��)�֜ضȂ����������r��Ҫ����^�ߣ��ӕr�����`��t�����x����(sh��)��(j��)��߀��Ҫ�����L��DS18B20�������������@���ٴ��f���L��DS18B20��������£��ٳ�ʼ������ROM�����DS18B20�ĺ���(sh��)���
��֮���@���־�����Ҫע��ľ����ӕr����Ĝ�(zh��n)�_�ԡ�������DS18B20�IJ���������ќضȔ�(sh��)�ւ�����Ƭ�C(j��)��
6.2.2 ��λ�C(j��)��ܛ���{(di��o)ԇ
��λ�C(j��)�ľ��̹�����C++ builder����Ҫ��VCL�ؼ���ʹ�á���Ҫ�Ѓɂ�ģ�K�M�ɣ�ͨ��ģ�K�͈D��̎��ģ�K������ͨ��ģ�Kؓ(f��)؟(z��)̎����λ�C(j��)����λ�C(j��)֮�g��ͨ�ţ��D��̎��ģ�Kؓ(f��)؟(z��)�ضȲɼ��D��
����ͨ��ģ�K����Ҫ���{(di��o)��CH372�ĄӑB(t��i)�B�ӎ죬�����ڏS�ҵ�CH372�ӑB(t��i)�B�ӎ���ʹ��Visual C���������ģ�C++ builder ����ֱ���\(y��n)�ã���t�����г��e��Ϣ������Ҫ��(j��ng)�^һ����̎����
̎���@һ���}��Ҫ�ЃɷN�������@ʽ�B�ӷ���ʹ��C����Builder���ṩ�Č�(d��o)������ɹ��ߡ������@ʾ�B�ӌ�����ϵ�y(t��ng)�ж���{(di��o)�ÄӑB(t��i)�B�ӎ�Ķ�������(sh��)�ܲ����㣬�@���x��ʹ��C����Builder���ṩ�Č�(d��o)������ɹ��ߡ����E���£�
(1)��C����Builder�ṩ��implib.exe������������ԓ�ӑB(t��i)�죨xxx.dll���Č�(d��o)��죨xxx.lib�����������£�
����implib ch372.lib ch372.dll��
ch372.dll�����ЄӑB(t��i)�죬ch372.lib��Ҫ���ɵČ�(d��o)��졣�ɴ����ɵČ�(d��o)���ch372.lib��ʽ�cC����Builder�_�l(f��)ƽ�_�����ݵģ�
(2)�ڄӑB(t��i)����^�ļ�ch372.h�У�����ݔ������(sh��)�����f�����Z�����£�
���� extern _stdcall HANDLE WINAPI CH375OpenDevice(
ULON GiIndex );// ָ��CH372
�O(sh��)����̖,0����(y��ng)��һ���O(sh��)��
(3)Ȼ������[ʽ朽ӷ������������ɵČ�(d��o)��죨ch372.lib���������f�����^�ļ�(ch372.h)���뵽C����Builder��(y��ng)�ó���Ĺ����(xi��ng)Ŀ�У��M(j��n)�о��g���B�ӡ�
���ڈD��̎��ģ�K����(y��ng)��ܛ������(j��)���ܵ��Ĝضȣ�����C++ builder�ڴ��w�Ϯ����ӑB(t��i)�B�ӈD����Ҫ���ô��wCanvas���ԁ팍(sh��)�F(xi��n)��
6.2.3 ��λ�C(j��)����λ�C(j��)(li��n)�C(j��)�{(di��o)ԇ
��λ�C(j��)����Ƭ�C(j��)����CH372��ʼ���ɹ�֮����λ�C(j��)���܉��R�e��λ�C(j��)�O(sh��)�䣨USB�O(sh��)�䣩����λ�C(j��)�{(di��o)ԇ����Ҳ������ɣ��Ǿ��M(j��n)��ϵ�y(t��ng)���w�{(di��o)ԇ��
���w�{(di��o)ԇ��Ҫ��������
��1���yԇ��Ƭ�C(j��)��PC�C(j��)�ܷ�����ͨ�ţ�
�@�����õķ������£�����λ�C(j��)�ij����O(sh��)Ӌ(j��)һ������λ�C(j��)�l(f��)�͵��ַ���(sh��)�M�����硰1214����Ȼ����PC�C(j��)���M(j��n)�в��������Ƿ��ܳɹ����ܔ�(sh��)�M������ܣ��t�f����Ƭ�C(j��)��������λ�C(j��)�l(f��)����(sh��)��(j��)�����Єt����λ�C(j��)����λ�C(j��)���P(gu��n)���ֵij�����PC����λ�C(j��)�l(f��)�͔�(sh��)��(j��)�������λ�C(j��)�܉�ɹ�������ͬ�Ĕ�(sh��)��(j��)��PC�C(j��)�ϣ��t�f���Ϟ�C(j��)����λ֮�g��ͨ���ѽ�(j��ng)�ɹ���
��2���yԇ��Ƭ�C(j��)�ܷ�DS18B20�������xȡ�ضȣ�
�������һ�������M(j��n)���@һ���{(di��o)ԇ��ǰ���ѽ�(j��ng)�ᵽ��DS18B20�Č��r��Ҫ��ܸߣ�һ��Ҫ��(zh��n)�_�����Ұ�DS18B20�������M(j��n)�в�������Ӳ���·ԭ��]���e����r�£�����ض��x�����_�����ߟo���xȡ�ضȣ�ֻ���dz��F(xi��n)�ɷN�e�`��һ�Ǖr���}���]�а���DS18B20�ĕr�ȁ팦���M(j��n)�в��������dž�Ƭ�C(j��)�L��DS18B20������}����Ƭ�C(j��)�]�Ї�(y��n)�����L��DS18B20�����?q��)���l(f��)�������Ƭ�C(j��)�L��DS18B20������@���ٴ�������ʼ����ROM���DS18B20�ĺ���(sh��)���
�@һ���ֳ��F(xi��n)�ăɂ����}������r�³��F(xi��n)���Ǖr���}�������eע���Ƭ�C(j��)����DS18B20�ľ��_�ӕr��
��3���ɼ��ضȣ�
������ͨ����������Բɼ���(sh��)��(j��)��̎������?y��n)�ϵ�y(t��ng)�ɼ��^������λ�C(j��)ÿ�l(f��)��һ�l�ɼ������λ�C(j��)���ς�һ�ΜضȔ�(sh��)��(j��)�������@һ����Ҫ�{(di��o)ԇ������λ�C(j��)Ҫ�g�����L�r�g���r����λ�C(j��)�l(f��)�Ͳɼ����ʹϵ�y(t��ng)�ܿ��ٲɼ��ضȲ��ς�������ֹ�l(f��)���x���ț_ͻ��
6.3 ϵ�y(t��ng)����ָ��(bi��o)
ϵ�y(t��ng)����ָ��(bi��o)��Ҫ�ǣ�
��1���y���ض��`��С�ڻ��ߵ���0.5�棻
��2���ض��@ʾ�ֱ��ʞ�0.0625�棻
��3���y���ضȷ�����0�桫70�棻
��4�����п��ƈ��ܡ�
7 ϵ�y(t��ng)�ĺ��β����f��
���Ñ�ʹ�ñ�ϵ�y(t��ng)�������Ԍ����M(j��n)�����µĺ��β�����
��1�����ȴ��_USB�O(sh��)�䣻����λ�C(j��)ܛ���ϴ��_USB�O(sh��)�䣬��������λ�C(j��)����λ�C(j��)��ͨ�řC(j��)�ơ�ʹ�ñ�ϵ�y(t��ng)������Ҫ���_USB�O(sh��)�䡣
��2����Ӌ(j��)��C(j��)�˵đ�(y��ng)��ܛ���M(j��n)�Мض��xȡ�������������õ�ԓ�h(hu��n)���ضȵČ�(sh��)�r�ضȣ�
��3����������λ�C(j��)��ݔ��O�ޜضȣ���λ�C(j��)�јO�ޜضȰl(f��)�͵���λ�C(j��)�����ұ�������λ�C(j��)��һ�����^���t��
��4����λ�C(j��)��(y��ng)��ܛ���ṩ��(sh��)�rʹ�Î������ܡ�����Ñ���֪����ô��ʹ��ܛ�����t����ͨ�^���������ܿ���ʹ�ñ�ϵ�y(t��ng)ܛ����
8 ���Y(ji��)
�ڴ˴ή��I(y��)�O(sh��)Ӌ(j��)���_�l(f��)�^���У����XC �Z�ԣ���Ƭ�C(j��)C�Z�Ժ�C++�����쾚�̶����(xi��ng)Ŀ�_�l(f��)���P(gu��n)�I���S�����}�䌍(sh��)ԭ���϶��Ƿdz�����Ė|������һЩ�Y���϶������ҵ������Լ����}Ŀ�У�Ҫ����Ҳ���nj�ԭ�������ĜضȲɼ��������Ƭ�C(j��)����ˣ��_�l(f��)��������]�ж��ل�(chu��ng)���ԣ��]�ж��ٸ����֪�R��Ҫ�߂�ăH�nj�C �Z�Ե��쾚���Լ��W(xu��)����Q�����Ć��}��
�����@�ή��I(y��)�O(sh��)Ӌ(j��)����һ���w�����nj���Ӳ�����O(sh��)Ӌ(j��)����Ӳ����ϻ��������P(gu��n)�����ϵġ���������ϵ�y(t��ng)Ӳ���wϵ��ͬ��������Ҫһ����׃ͨ�����Ͳ���ֻ������ʾ���������á����籾ϵ�y(t��ng)��Ƭ�C(j��)��������裬���϶��fһ���õ���1K-10K�����nj�(sh��)�H���@��ϵ�y(t��ng)���Dz��m�õģ������1K-10K�������M(j��n)��CH372��������^���@���_�����������оƬ�����P(gu��n)��оƬ�ą���(sh��)�ܶ���r�£��O(sh��)Ӌ(j��)�ˆT�����ں�����������ֻ�{���ϵ�֪�R���O(sh��)Ӌ(j��)�·�������˼�(x��)��(ji��)���@���DZ���ϵ�y(t��ng)�O(sh��)Ӌ(j��)�д��ڵĆ��}��
��ϵ�y(t��ng)�O(sh��)Ӌ(j��)���õĂ�����DS18B20���ӕrҪ��ܸߣ��������{(di��o)ԇ���^���У��ضȟo���@ʾ���z��Ӳ���·��ܛ�����}���]�аl(f��)�F(xi��n)�����}����(d��ng)�r����Ҫ���]���ǜضȂ�����DS18B20оƬ�ѽ�(j��ng)���ˣ���(j��ng)�^��η������X��оƬ�ŵ�һ��ʹ�ã��ĵĿ����Ժ�С����һ���ضȂ��������r��Ҫ��ܸߣ����Ԝضȟo���x�����ȿ��]����Ƭ�C(j��)�o�����_����DS18B20�ĕr���xȡ�ضȡ����_��(sh��)�x���˜ضȔ�(sh��)��(j��)����Ƭ�C(j��)���ӕr����һ�㌦ϵ�y(t��ng)���f��Ҫ���Ǻܾ��_�����DZ����O(sh��)Ӌ(j��)�sҪ��dz���(y��n)���@�c(di��n)���ע�⡣
֮�⣬��λ�C(j��)��(y��ng)��ܛ���ľ���������C++ builder , ����(n��i)�ܶ��Y�϶��ǽ�B�Ķ��ǻ����ؼ���ʹ�ã��漰�����D���Y�ϱ��^�٣��e�Ǯ��ӑB(t��i)�D��ϵ�y(t��ng)ֻ�����������w������ϵ�y(t��ng)�ĜضȲɼ��D����C ++�ĄӑB(t��i)�B�ӆ��}�����Ǖ��Ͻ�B���ǘӣ������������������˲��ن��}���B���e�`�ȵȡ�
�x �o
���ȣ���Ҫ���x�ҵČ�(d��o)�����ώ������@�ή��I(y��)�O(sh��)Ӌ(j��)�������^���У����o�c�ҘO��Ď�����
��(j��ng)�^�@�ή��I(y��)�O(sh��)Ӌ(j��)��ʹ���������\(y��n)���˴�W(xu��)��W(xu��)���ĺܶ���Փ֪�R����(y��ng)�õ���(sh��)�Hϵ�y(t��ng)���O(sh��)Ӌ(j��)�У��@�ή��I(y��)�O(sh��)Ӌ(j��)�����f��һ����(sh��)��(zh��n)��һ����Փ�c��(sh��)�`���ЙC(j��)�Y(ji��)�ϣ��@�ή��I(y��)�O(sh��)Ӌ(j��)�v��3���£�ͨ�^3���µĕr�g�ˣ��Ҳ���ČW(xu��)��(x��)��֪�R�������|�������Ҽ��W(xu��)���ã����ώ����@�ﮅ�I(y��)�O(sh��)Ӌ(j��)�^���о��������Ć��}�o�����_��Ч������(d��o)��ʹ���܉���������ꮅ�I(y��)�r�g�����ΌW(xu��)��(y��n)֔(j��n)��֪�R�Y�����B(t��i)�ȟ����J(r��n)�棬�o����������̵�ӡ�����������@��dz��ĸ��x�ҵČ�(d��o)�����ώ���Ҳ���x�W(xu��)У�o�����@�ӵ�һ��呟��ęC(j��)�������x���ή��I(y��)�O(sh��)Ӌ(j��)�нo����?gu��)��������е��ώ���ͬ�W(xu��)��
�����īI(xi��n)
[1] ������.����C�Z�Ծ���--MS-51��Ƭ�C(j��)�����͑�(y��ng)��[M] .���A��W(xu��)������ .2003.1
[2] ϯ�l(w��i)��.C++ builder 6�����O(sh��)Ӌ(j��)�c��(sh��)��[M] .ұ�I(y��)������.2003.6
[3] �����d.Borland C++ Builder 5 ��(sh��)�����v[M] . ���A��W(xu��)������.2001.6
[4] �ו�ƽ.��Ƭ�C(j��)���䑪(y��ng)��[M].��ӿ�Ҋ��W(xu��)������. 2003.3
[5] ꐆ���. Ӌ(j��)��C(j��)USB�ӿڼ��g(sh��)[M] �Ͼ���W(xu��)������. 2003.1
[6] ��� ���.C++ builder��(sh��)�ü��g(sh��)�c��(j��ng)�䰸��[M].���A��W(xu��)������. 2002.11
[7] ������ ��Ӣ��.USB2.0ԭ���c�����_�l(f��)[M].�������I(y��)������.2002.3
[8] ɳռ�� �����.���ɻ����܂�����ԭ���c��(y��ng)��[M].��ӹ��I(y��)������.2004.1
[9] �����I(y��).�����·/Ӌ(j��)��C(j��)Ӳ�������Z��VHDL�ߵȽ̳�[M].���A��W(xu��)������.2003.6
[10] Universal Serial Bus Specification Revision 1.1. Compaq Computer Corporation��Intel
Corporation��Microsoft Corporation��NEC Corporation: September 23, 1998.
�� �
1.protelԭ��D

1PCB�D

2��ϵ�y(t��ng)���ֳ���
(1)��λ�C(j��)���ֳ���D
#include <reg51.h>
#include <string.h>
#include "ch372.h"
#define uchar unsigned char
#define uint unsigned int
#define VID 0x8888
#define PID 0x9999
#define USBCMD_WR 100 //��(sh��)��(j��)
#define USBCMD_RD 101 //�O(sh��)�Èض�
#define DS18B20 102 //�z�y�Ƿ��МضȂ�����
#define CH375PORT P2
sbit CH375_WR=P0^5; //����CH372�Č���(sh��)��(j��)��̖
sbit CH375_RD=P0^6; //����CH372���x��(sh��)��(j��)��̖
sbit CH375_A0=P0^7; //����CH372�Č�������̖
data uchar buffer[64];
data uchar USBCMD;
bit UsbRecvOk;
sbit LED0=P1^1;
sbit LED1=P1^2;
sbit DQ=P1^0;
static float bwendu;
//DS18B20�ij���
void delaym(uchar time) //�ӕr��(time*2+3)us
{
for(;time>0;time--);
}
uchar read_byte(void)
{uchar i,value=0;
for(i=0;i<8;i++)
{value>>=1;
DQ=0; //������DQ�����_ʼ�x�r��
DQ=1; //ጷ�DQ;
delaym(1);
if(DQ) value|=0x80;
delaym(6); //�xȡ�r�g�g϶,Ҫ����1us
}
return (value);
}
void write_byte(uchar value)
{ uchar i;
for(i=0;i<8;i++)
{DQ=0;
DQ=value&0x01; //ÿ�Ό�1λ,ͨ�^val���Ƶõ�
delaym(5); //�ӕr34us(15~60us�ɘӕr�g)
DQ=1;
value>>=1;
}
delaym(5); //2�Ό��ĕr�g�g϶Ҫ����1us
}
uchar DS18B20_RESET(void)
{uchar da;
DQ=0;
delaym(29); //����DQ��480us
DQ=1;
delaym(3); //�ȴ�15~60us
da=DQ;
delaym(25);
return (da);//��оƬ��(y��ng)��da=0,�o�tda=1
}
unsigned int readtemperature(void) //�x�ض�
{ uchar a=0,b=0; // c��ضȵ�С��(sh��)����?
unsigned int t=0;
DS18B20_RESET();
write_byte(0xCC); // ���^�x��̖��̖�IJ���
write_byte(0x44); // ���Ӝض��D(zhu��n)�Q
DS18B20_RESET();
write_byte(0xCC); //���^�x��̖��̖�IJ���
write_byte(0xBE); //�xȡ�ضȼĴ����ȣ������x9���Ĵ����� ǰ�ɂ����ǜض�
a=read_byte();
b=read_byte();
t=b;
t<<=8;
t=t|a;
return(t);
}
void Delayms(uint m)
{
uint i;
while(m-->0)
for (i=0; i<500; i++);
}
void CH375_CMD(uchar x) //��CH372������
{
CH375_A0=1;
CH375PORT=x;
CH375_WR=0;
CH375_WR=1;
}
void CH375_DAT_WR(uchar x) //��CH372����(sh��)��(j��)
{
CH375_A0=0;
CH375PORT=x;
CH375_WR=0;
CH375_WR=1;
}
uchar CH375_DAT_RD() //��CH372�x��(sh��)��(j��)
{
uchar x;
CH375_A0=0;
CH375PORT=0xff;
CH375_RD=0;
x=CH375PORT;
CH375_RD=1;
return x;
}
void CH375_Init( ) //CH372��ʼ��
{
CH375_CMD(CMD_SET_USB_ID); //�� VID��PID
CH375_DAT_WR(VID&0xff);
CH375_DAT_WR(VID>>8);
CH375_DAT_WR(PID&0xff);
CH375_DAT_WR(PID>>8);
CH375_CMD(CMD_SET_USB_MODE);
CH375_DAT_WR(2);
}
void LoadUpData( uchar data *Buf, uchar Len ) //��(sh��)��(j��)
{
uchar i;
CH375_CMD(CMD_WR_USB_DATA7);
CH375_DAT_WR(Len);
for ( i=0; i<Len; i++ )
CH375_DAT_WR(Buf[i]); /* ���d��(sh��)��(j��) */
}
void CH375Interrupt( ) interrupt 0 using 1
{
unsigned char Status;
unsigned char length, i;
EX0 = 0;
CH375_CMD(CMD_GET_STATUS);
Status = CH375_DAT_RD();
switch(Status)
{
case USB_INT_EP2_OUT: /* �������c(di��n)���ɹ� */
CH375_CMD(CMD_RD_USB_DATA);
length = CH375_DAT_RD();
if(length>64) length=64;
for(i=0; i<length; i++)
buffer[i] = CH375_DAT_RD();
LED1=0;
UsbRecvOk=1;
USBCMD=buffer[0];
break;
case USB_INT_EP2_IN:
LED1=0;
CH375_CMD(CMD_UNLOCK_USB);
break;
case USB_INT_EP1_IN:
CH375_CMD(CMD_UNLOCK_USB);
break;
}
EX0 = 1;
}
void main( )
{ uint wendu;
float tt;
uchar a,b;
uchar reset; //DS18B20��(f��)λ�ɹ�
uint k;
EA=1; EX0 = 1;
CH375_CMD(CMD_RESET_ALL);
Delayms(50);
CH375_Init();
UsbRecvOk=0;
LED0=1;
LED1=0;
while(1)
{ k++;
if(UsbRecvOk)
{
UsbRecvOk=0;
switch(USBCMD)
{
case USBCMD_RD:
wendu=readtemperature(); //�x�ض�
b=wendu&0x0f;
a=(wendu>>4)&0xff;
buffer[0]=a; //�ض�����(sh��)����
buffer[1]=b; //�ض�С��(sh��)����
LoadUpData(buffer,3); //�ς��ض�
tt=a+b*0.0625;
break;
case USBCMD_WR: //�O(sh��)�Èض�
bwendu=buffer[1]+buffer[2]*0.1;
break;
case DS18B20 : //�z�y�Пo�ضȂ�����
reset=DS18B20_RESET();
buffer[0]=reset;
LoadUpData(buffer,3);
}
}
if(tt>=bwendu)
LED0=0;
else
LED0=1;
}
}
��2����λ�C(j��)���ֳ���
//----------------------------------------------------------------------
#ifndef Unit1H
#define Unit1H
//----------------------------------------------------------------------
#include <Classes.hpp>
#include <Controls.hpp>
#include <StdCtrls.hpp>
#include <Forms.hpp>
#include <ExtCtrls.hpp>
//----------------------------------------------------------------------
class TForm1 : public TForm
{
__published: // IDE-managed Components
TButton *Button1;
TButton *Button2;
TButton *Button3;
TEdit *Edit1;
TEdit *Edit2;
TButton *Button4;
TLabel *Label1;
TLabel *Label2;
TShape *Shape1;
TShape *Shape2;
TShape *Shape3;
TButton *Button5;
TTimer *Timer1;
TTimer *Timer2;
TShape *Shape4;
TLabel *Label3;
TLabel *Label4;
TLabel *Label5;
TLabel *Label6;
TLabel *Label7;
TLabel *Label8;
TLabel *Label9;
TLabel *Label10;
void __fastcall Button4Click(TObject *Sender);
void __fastcall Button1Click(TObject *Sender);
void __fastcall Button3Click(TObject *Sender);
void __fastcall Button2Click(TObject *Sender);
void __fastcall Button5Click(TObject *Sender);
void __fastcall Timer1Timer(TObject *Sender);
private: // User declarations
public: // User declarations
__fastcall TForm1(TComponent* Owner);
ULONG index ;
float baojing; //����O(sh��)�õĈض�
unsigned char sent[64],jieshou[64];
unsigned long length;
unsigned int image[64];
unsigned int x1,y1; //����(bi��o)
};
//----------------------------------------------------------------------
extern PACKAGE TForm1 *Form1;
//----------------------------------------------------------------------
#endif
//----------------------------------------------------------------------
#include <vcl.h>
#pragma hdrstop
#include "Unit1.h"
#include "CH375DLL.H"
//----------------------------------------------------------------------
#pragma package(smart_init)
#pragma resource "*.dfm"
TForm1 *Form1;
//----------------------------------------------------------------------
__fastcall TForm1::TForm1(TComponent* Owner)
: TForm(Owner)
{ Form1->Timer1->Enabled=false; //�P(gu��n)���r��
Form1->Timer2->Enabled=false;
baojing=50;
}
//----------------------------------------------------------------------
void __fastcall TForm1::Button4Click(TObject *Sender)
{
Form1->Close(); //�P(gu��n)�]����
CH375CloseDevice(0);//�P(gu��n)�]CH372
}
//----------------------------------------------------------------------
void __fastcall TForm1::Button1Click(TObject *Sender)
{ length=64;
if(LoadLibrary("CH375DLL.DLL")==NULL)
ShowMessage("�o�����dDLL�ļ�");
if ( CH375OpenDevice(0) == INVALID_HANDLE_VALUE )
ShowMessage("�o�����_CH372") ;
else
ShowMessage("�ɹ����_CH372");
sent[0]=102;
CH375WriteData(0,&sent,&length); //�l(f��)�͙z�y�ضȂ�����������
CH375ReadData(0,&jieshou,&length); //�����Փ�(j��)
if(jieshou[0])
ShowMessage("�o���z�y���ضȂ�����");
Form1->Timer1->Enabled=false;
Form1->Label9->Canvas->Pen->Width=6; //��ϵ�y(t��ng)����(bi��o)�S
Form1->Label9->Canvas->MoveTo(0,0); Form1->Label9->Canvas->LineTo(0,270);
Form1->Label9->Canvas->MoveTo(0,270); Form1->Label9->Canvas->LineTo(350,270);
Form1->Label9->Canvas->Pen->Width=1;
Form1->Label9->Canvas->Pen->Style=psDashDotDot;
Form1->Label9->Canvas->MoveTo(0,220); Form1->Label9->Canvas->LineTo(350,220);
Form1->Label9->Canvas->MoveTo(0,170); Form1->Label9->Canvas->LineTo(350,170);
Form1->Label9->Canvas->MoveTo(0,120); Form1->Label9->Canvas->LineTo(350,120);
Form1->Label9->Canvas->MoveTo(0,70);
Form1->Label9->Canvas->LineTo(350,70);
Form1->Label9->Canvas->MoveTo(0,20); Form1->Label9->Canvas->LineTo(350,20);
x1=0;
y1=30;
}
//----------------------------------------------------------------------
void __fastcall TForm1::Button3Click(TObject *Sender)
{
Form1->Timer1->Enabled=true;
}
//----------------------------------------------------------------------
void __fastcall TForm1::Button2Click(TObject *Sender)
{ float j;
unsigned int t1,t2;
unsigned long length=64;
unsigned char value,i;
unsigned char n,m;
i=StrToInt(Edit1->GetTextLen());
if(i==0)
ShowMessage("Ոݔ�딵(sh��)��(j��)");
else
j=StrToFloat(Edit1->Text);
if(j>50)
value=Application->MessageBox(" ���O(sh��)�õĈض��ѽ�(j��ng)���^���ޜضȣ�50", "information", 5);
switch(value)
{ case 4: Edit1->Text=InputBox("�ض�","Ոݔ��ض�","");
break;
case 2: break;
}
j=StrToFloat(Edit1->Text);
baojing=j;
t1=(int)(j);
t2=(int)(j*10);
m=(char) t1; //����(sh��)����
n=(char)(t2%10); //��(sh��)����
sent[0]=101;
sent[1]=m;
sent[2]=n;
if(CH375WriteData(0,&sent,&length))
Form1->Shape1->Brush->Color=clTeal; //���ɹ�
else ShowMessage("�o���O(sh��)�Èض�");
}
//----------------------------------------------------------------------
void __fastcall TForm1::Button5Click(TObject *Sender)
{
Form1->Timer1->Enabled=false; //���_���r��
}
//----------------------------------------------------------------------
void __fastcall TForm1::Timer1Timer(TObject *Sender)
{
unsigned char a,b,c,i;// a��ض�����(sh��)���֣�b��ض�С��(sh��)����
unsigned long len=64;
float wendu;
sent[0]=101;
CH375WriteData(0,&sent,&len) ;
if(CH375ReadData(0,&jieshou,&len))
{ a=jieshou[0]; //a�ضȵ�����(sh��)����
b=jieshou[1]; //b����(sh��)����
wendu=(float)(a+b*0.0625);
Edit2->Text=FloatToStr(wendu);
Form1->Shape2->Brush->Color=clRed;
if(wendu>=baojing)
Form1->Shape4->Brush->Color=clRed;
else
Form1->Shape4->Brush->Color=clWhite;
if(c>0.5)
a=a+1; //�������룻
Form1->Label9->Canvas->Pen->Width=2; //���ӑB(t��i)�D��
Form1->Label9->Canvas->Pen->Color=clRed;
Form1->Label9->Canvas->MoveTo(x1,270-y1*5);
Form1->Label9->Canvas->LineTo(x1+10,270-a*5);
y1=a;
x1=x1+10;
if(x1>350)
{ Form1->Label9->Refresh();
x1=0,y1=30;
Form1->Label9->Canvas->Pen->Color=clBlack; //���®�����(bi��o)
Form1->Label9->Canvas->Pen->Width=6;
Form1->Label9->Canvas->MoveTo(0,0); Form1->Label9->Canvas->LineTo(0,270);
Form1->Label9->Canvas->MoveTo(0,270); Form1->Label9->Canvas->LineTo(350,270);
Form1->Label9->Canvas->Pen->Width=1;
Form1->Label9->Canvas->Pen->Style=psDashDotDot;
Form1->Label9->Canvas->MoveTo(0,220); Form1->Label9->Canvas->LineTo(350,220);
Form1->Label9->Canvas->MoveTo(0,170); Form1->Label9->Canvas->LineTo(350,170);
Form1->Label9->Canvas->MoveTo(0,120); Form1->Label9->Canvas->LineTo(350,120);
Form1->Label9->Canvas->MoveTo(0,70); Form1->Label9->Canvas->LineTo(350,70);
Form1->Label9->Canvas->MoveTo(0,20); Form1->Label9->Canvas->LineTo(350,20);}
}
else
{Form1->Timer1->Enabled=false;
ShowMessage("���ղ��ɹ�"); }
}
//----------------------------------------------------------------------
3��λ�C(j��)��(y��ng)��ܛ��