
































 06.�љC(j��)�����Ѽӹ��õIJ���(l��i)����ģ��
06.�љC(j��)�����Ѽӹ��õIJ���(l��i)����ģ��  07.��һ���N�Ϗ�(qi��ng)���p���z
07.��һ���N�Ϗ�(qi��ng)���p���z  08.�ʹ��ӹ��ĈAƬ�دB��һ��
08.�ʹ��ӹ��ĈAƬ�دB��һ�� 09.���C��ȫ�غ�
09.���C��ȫ�غ� 10.�@��5.0mm�Ŀ�
10.�@��5.0mm�Ŀ� 11.����6.2mm���@�^��һ�¿ij��^Ч����ȥ����߅�������
11.����6.2mm���@�^��һ�¿ij��^Ч����ȥ����߅������� 12.늙C(j��)���������
12.늙C(j��)��������� 13.�_(k��i)ʼ�@β�܊A�ݽz��
13.�_(k��i)ʼ�@β�܊A�ݽz�� 14.ȫ�����
14.ȫ����� 15.����
15.���� ���ˣ�늙C(j��)�̶�Ƭ���ꡣ����ԓ�ӹ�Ӳ�PƬ�ˣ��������õęC(j��)����Ӳ�PƬ��ģ�ߣ��ѱPƬ���p���zճ��һ��M���غϣ�Ȼ�����_(t��i)�@�_(k��i)�ݿס��@���IӲ�P�r(sh��)�](m��i)ע�⣬�I���˂��f(shu��)�е�IBM�����P �����濴����(l��i)���X�PƬһ�ӣ��@�וr(sh��)�Űl(f��)�F(xi��n)����(du��)�ţ������@�^�r(sh��)��Ȼ�@����ȥ��һʹ�ţ��PƬ���ˣ�������(l��i)һ���������P ��My god!!!16.�ӹ�Ӳ�PƬ�r(sh��)�����F(xi��n)�����⡣��Ȼ�I���˂��f(shu��)�е�IBM�����P
���ˣ�늙C(j��)�̶�Ƭ���ꡣ����ԓ�ӹ�Ӳ�PƬ�ˣ��������õęC(j��)����Ӳ�PƬ��ģ�ߣ��ѱPƬ���p���zճ��һ��M���غϣ�Ȼ�����_(t��i)�@�_(k��i)�ݿס��@���IӲ�P�r(sh��)�](m��i)ע�⣬�I���˂��f(shu��)�е�IBM�����P �����濴����(l��i)���X�PƬһ�ӣ��@�וr(sh��)�Űl(f��)�F(xi��n)����(du��)�ţ������@�^�r(sh��)��Ȼ�@����ȥ��һʹ�ţ��PƬ���ˣ�������(l��i)һ���������P ��My god!!!16.�ӹ�Ӳ�PƬ�r(sh��)�����F(xi��n)�����⡣��Ȼ�I���˂��f(shu��)�е�IBM�����P
 18.���τ������ֱ���
18.���τ������ֱ���  19.늙C(j��)�̶������b��ɵĘ���
19.늙C(j��)�̶������b��ɵĘ���  20.��߅����450�ֱ�_��
20.��߅����450�ֱ�_��  21.늙C(j��)�̶�������
21.늙C(j��)�̶�������  22.���c(di��n)����
22.���c(di��n)����  23.�X(ju��)�ò��^(gu��)�a��Ԓ���ف�(l��i)��(g��)��(c��)��
23.�X(ju��)�ò��^(gu��)�a��Ԓ���ف�(l��i)��(g��)��(c��)�� 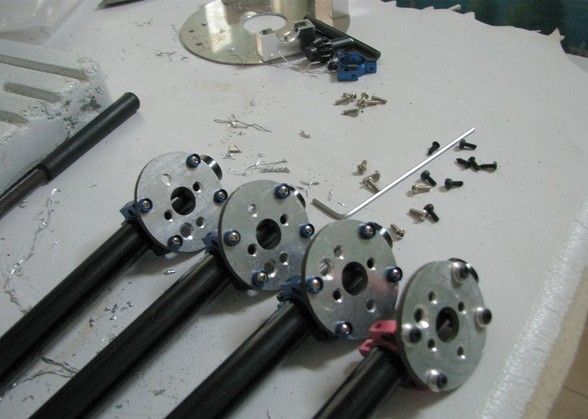
 24.����β�܊A�Ĺ̶���r
24.����β�܊A�Ĺ̶���r  25.�Q��(g��)�Ƕ�
25.�Q��(g��)�Ƕ� 26.����һ�C(j��)���ϵ�Ӳ�PƬ�b�ϣ�����Ч����
26.����һ�C(j��)���ϵ�Ӳ�PƬ�b�ϣ�����Ч����  27.��ԭ�C(j��)�ܵ�Ӳ�PƬ���C(j��)���b����(l��i)������Ч����
27.��ԭ�C(j��)�ܵ�Ӳ�PƬ���C(j��)���b����(l��i)������Ч���� 28.���S�ġ��C(j��)�^��
28.���S�ġ��C(j��)�^�� 29
29 30.
30. 31.��ҕ
31.��ҕ 32.��ҕ�����w��������ɣ��F(xi��n)��ֻ��Ӳ�PƬ��
32.��ҕ�����w��������ɣ��F(xi��n)��ֻ��Ӳ�PƬ��  �](m��i)�k��߀��ȥһ������Ј�(ch��ng)�����I�ɉK�fӲ�P���������߶�ʮһ�s����_(k��i)���������˿ښ⣬�@�����X�PƬ��33.��������s���A��(qi��ng)�����I��3��(g��)Ӳ�P
�](m��i)�k��߀��ȥһ������Ј�(ch��ng)�����I�ɉK�fӲ�P���������߶�ʮһ�s����_(k��i)���������˿ښ⣬�@�����X�PƬ��33.��������s���A��(qi��ng)�����I��3��(g��)Ӳ�P 34.��8��9���£�����ɫ߀���ã�����40G
34.��8��9���£�����ɫ߀���ã�����40G  35.�������߶�ʮһ�����_(k��i)�������f(shu��)
35.�������߶�ʮһ�����_(k��i)�������f(shu��) 36.���dž��w�PƬ��
36.���dž��w�PƬ�� 37.�PƬ�����(l��i)�ˣ��@�ص����X�P
37.�PƬ�����(l��i)�ˣ��@�ص����X�P 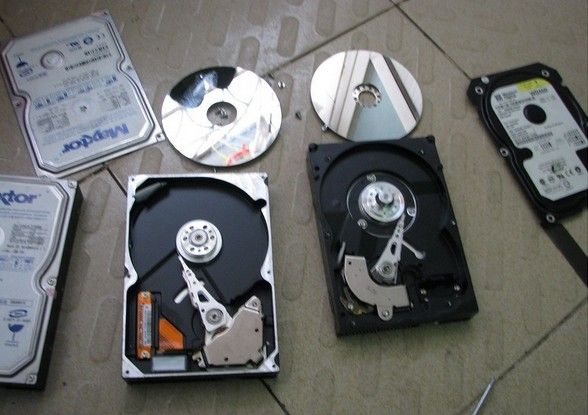 38.���U��IBM�����P
38.���U��IBM�����P  39.�_(k��i)��
39.�_(k��i)�� 40.�N���p���z
40.�N���p���z 41.�ѱPƬ�دB�ź�42.�ٷŵڶ����PƬ
41.�ѱPƬ�دB�ź�42.�ٷŵڶ����PƬ  43.�ӹ��õij�Ʒ
43.�ӹ��õij�Ʒ  44.�@��߅�������˳��^̎��
44.�@��߅�������˳��^̎�� 











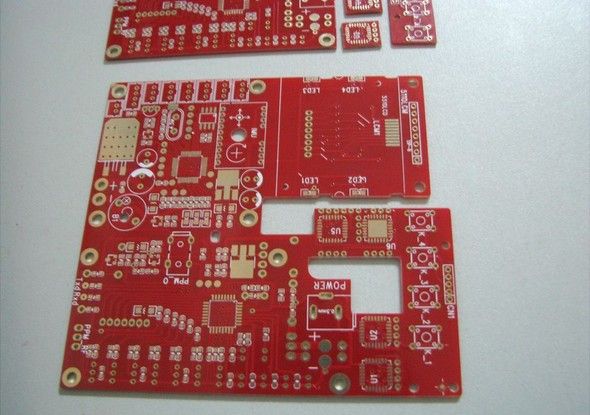
 ��2.�ĈDƬ�õ��o������
��2.�ĈDƬ�õ��o������  3.���հ�����
3.���հ����� 4.���棬�õ� 31136G
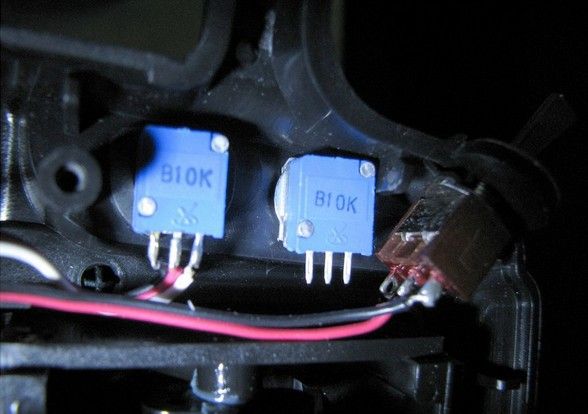
4.���棬�õ� 31136G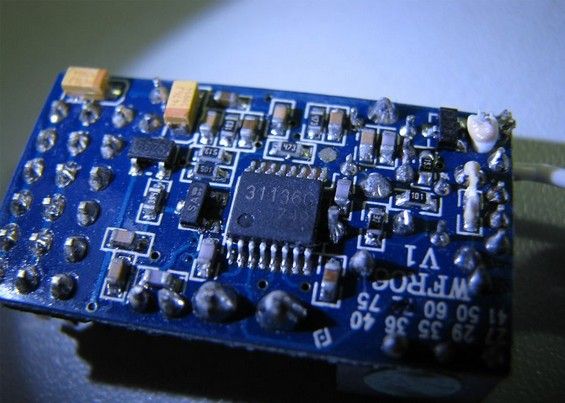 ��5.�쾀ݔ��˵ļӸо�Ȧ(С늸�)���ɜp���쾀���L(zh��ng)��
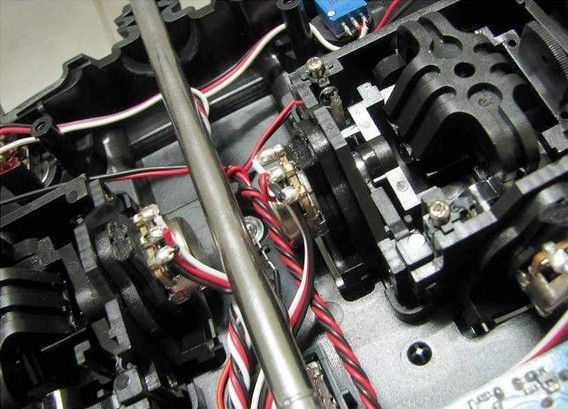
��5.�쾀ݔ��˵ļӸо�Ȧ(С늸�)���ɜp���쾀���L(zh��ng)��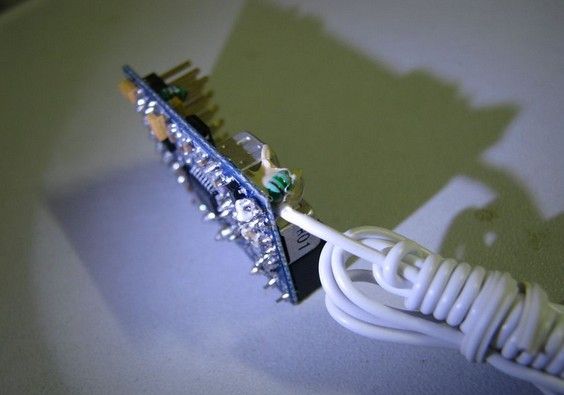 ��6.���߅��6ͨ��PWM��ݔ�����x��裬PPM��̖(h��o)��߉�D(zhu��n)�QоƬVHC164��1��2���_
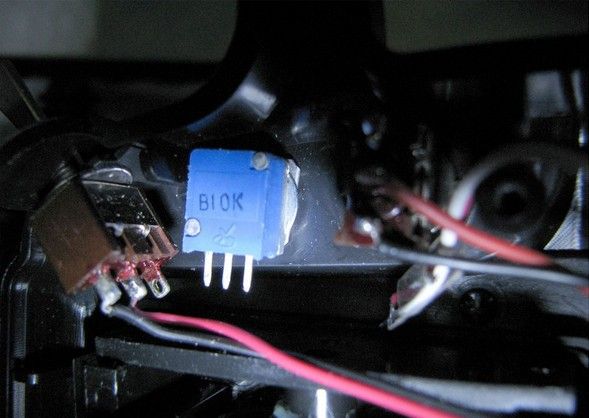
��6.���߅��6ͨ��PWM��ݔ�����x��裬PPM��̖(h��o)��߉�D(zhu��n)�QоƬVHC164��1��2���_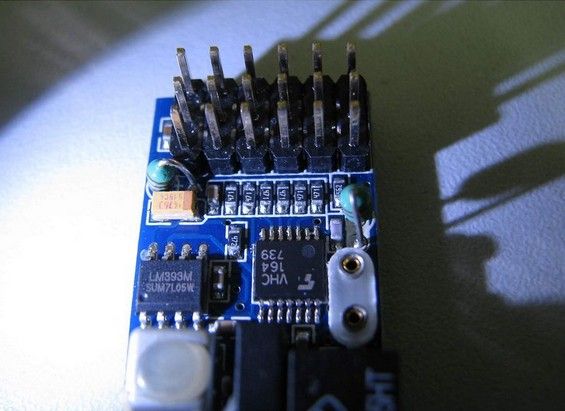 7.PPM��̖(h��o)�Ľ��ՙC(j��)��6ͨ����������ݔ�����x��躸����(l��i)
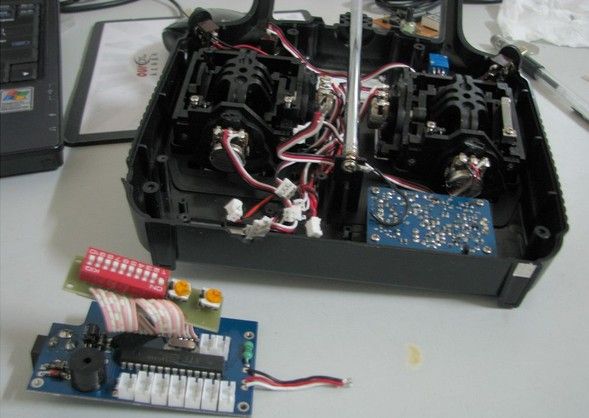
7.PPM��̖(h��o)�Ľ��ՙC(j��)��6ͨ����������ݔ�����x��躸����(l��i)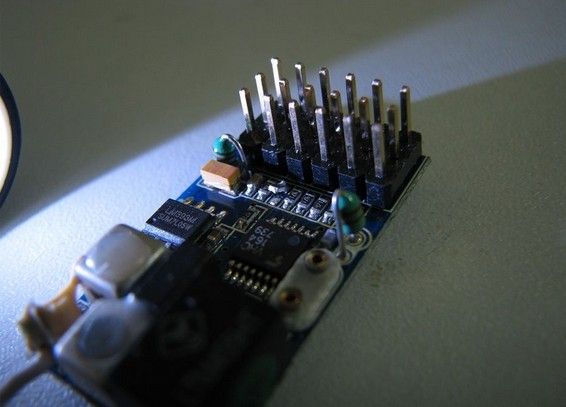 ��8.������ɡ��鰲ȫ��Ҋ(ji��n)���F��늺���
��8.������ɡ��鰲ȫ��Ҋ(ji��n)���F��늺���  9.�Q��(g��)�Ƕ�
9.�Q��(g��)�Ƕ� 10.���f(w��n)�ñ�y(c��)���Bͨ
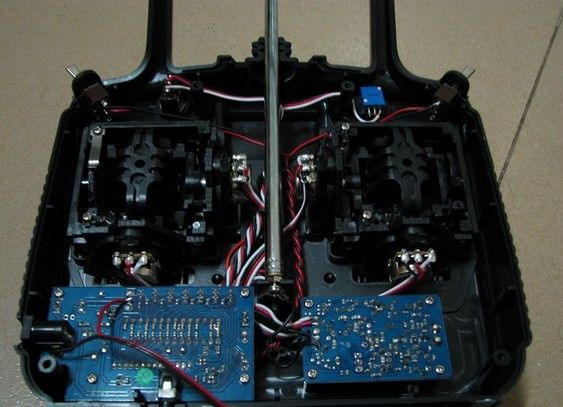
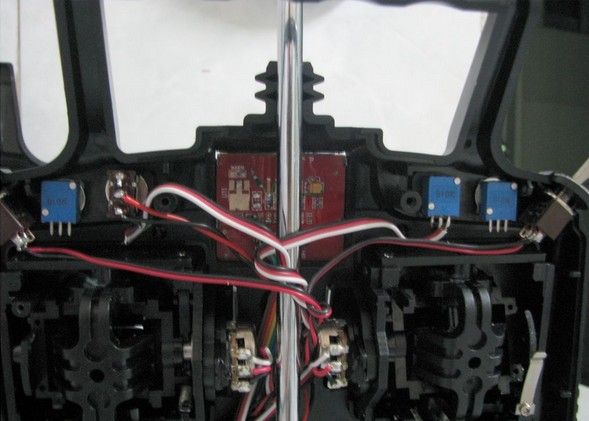
10.���f(w��n)�ñ�y(c��)���Bͨ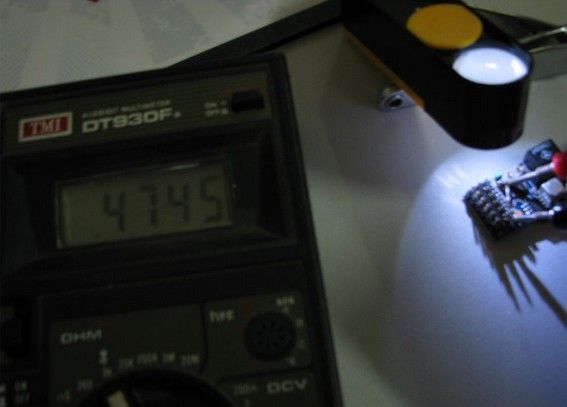 ��11.���S�Ҷ�����Ϲ�����4λ��DT930F+
��11.���S�Ҷ�����Ϲ�����4λ��DT930F+  ���@���ֹ�����S�w�����ęC(j��)�ܺ��b�����P(gu��n)�DƬ���N���ˣ��R�R��������һ�c(di��n)�DƬ���f(shu��)���C(j��)е�Y(ji��)��(g��u)��(du��)��λ���������_(d��)�ˁ�(l��i)�f(shu��)��������������Ҳ�Ͳ����M(f��i)������ �������������S�w�����C(j��)�ܺ�������P(gu��n)�O(sh��)������Ѵ�ɣ�����(l��i)�����S���`�겿��---�w��+��{(di��o)�ˡ���ʲô��{(di��o)Ҳ�������S���`�겿����?��?y��n)����SҪ�õ���{(di��o)��߀��������ͬ�ġ������������꣬�� (t��ng)����������(l��i)���������f(shu��)�w�صĺ��ĽM�ɺʹ��ԭ�������S�w��������(du��)�ڳ�Ҏ(gu��)��ģ��(l��i)�f(shu��)�������(f��)�s�ľ�����Ӳ����ˡ�֮�������w�еúܷ�(w��n)����ȫ����ӿ��Ʋ��ֵĹ��ڡ��ڳ�Ҏ(gu��)�̶����w�C(j��)�ϣ����݃x���dz���������������(du��)�ٿ��y�ȴ��c(di��n)��ֱ�C(j��)�ϣ���������Ԅ�(d��ng)��(w��n)��ϵ�y(t��ng)��Ҳֻ���iβ���õ����݃x�����S�w�����c�䲻ͬ�ĵط��DZ��������݃x���@�������Ҫ��Ȼ�o(w��)���w�У���Մ�����w��(w��n)�ˡ�����Ҫ�У�߀����3�S��(X��Y��Z)�����У��@�����S�w�����ęC(j��)е�Y(ji��)��(g��u)����(d��ng)���M�����ԛQ���ġ��ڴ˻��A(ch��)�����o��3�S���ٶȂ��������@6��(g��)���ɶȣ��ͽM�����w���ˑB(t��i)��(w��n)���Ļ������֣�Ҳ���P(gu��n)�I���IJ���---�T�Ԍ�(d��o)��ģ�K����(ji��n)�QIMU���w���е��ˑB(t��i)�Мy(c��)ȫ���@��(g��)IMU�ˣ���Ҋ(ji��n)��������ģ�͵ĺ��IJ������������f(shu��)�f(shu��)��{(di��o)�����S�w�������Ă�(g��)��(�����M(f��i)Ԓ:em15: )���Ƀ�����(du��)��ʮ�ֽ���Y(ji��)��(g��u)���ژ����D(zhu��n)���Ϸ����D(zhu��n)�ͷ��D(zhu��n)���@�ӿɵ���ģ�����������D(zhu��n)��ÿ��(g��)����ֱ����С��ͨ����10�����ҡ��Ă�(g��)���D(zhu��n)��(d��ng)�r(sh��)���x�����Ƿ�ɢ�ġ�����ֱ�C(j��)�Ę���ֻ��һ��(g��)�ܮa(ch��n)�����е��x�����γ��������|(zh��)�đT���x���������֙C(j��)�������ܿ�Ă�(c��)����������ͨ���õ��Ķ�C(j��)������̖(h��o)�����l�ʺܵ͡����S�����܉���ٷ���(y��ng)���ԑ�(y��ng)��(du��)�ˑB(t��i)׃��������h�ƣ���Ҫ�߷���(y��ng)�ٶȵ���{(di��o)����Ҏ(gu��)PPM��{(di��o)�ĸ����ٶ�ֻ��50Hz���ң��M�㲻���@�N��������Ҫ���ٶȣ���PPM��{(di��o)MCU��(n��i)��PID��(w��n)�ٿ��ƣ��܌�(du��)��Ҏ(gu��)��ģ�ṩ혻����D(zhu��n)��׃�����ԣ��������S�ϾͲ����m�ˣ����S��Ҫ���ǿ��ٷ���(y��ng)��늙C(j��)�D(zhu��n)��׃�����ø��ٌ�����{(di��o)��IIC�����ӿڂ��Ϳ�����̖(h��o)�����_(d��)��ÿ��װ���ǧ�ε�늙C(j��)�D(zhu��n)��׃���������S�w�Еr(sh��)���ˑB(t��i)�r(sh��)���܉ַ�(w��n)������ʹ�ܵ�����ͻȻ�_�������f��Ȼ�o(w��)�����������ǂ�(g��)�Є�(d��ng)��+��(sh��)���ɣ�������������Ƿ�ѣ��x���r(sh��)�����c(di��n)�����ĵġ���ݡ������߀�o�ώ��ˡ�߀���ÈDƬ�f(shu��)Ԓ�ɣ��@�Ӂ�(l��i)��ֱ���c(di��n)����������(l��i)��IIC������{(di��o)���@��(g��)Ҳ������ͨ�^(gu��)�y(c��)ԇ���������Ʋ������ɹ��ġ���ǰ����һ��(g��)�����аl(f��)�^(gu��)��һ�r(sh��)�Ҳ����ˡ����S�w���������C(j��)����+3S䇾�늳�ͨ����800g���£���ͣ���������^(gu��)12A����?j��n)���ÿ��(g��)��{(di��o)��Ҳ��3��4A��������]�����ܳ��F(xi��n)�ęC(j��)���ˑB(t��i)���(d��ng)�B(t��i)׃������r����(g��)��{(di��o)���ṩ25A�ķ�ֵ���������ˡ�������������{(di��o)ֻ����6��(g��)MOS�ܣ��y(c��)ԇ�^(gu��)���C(j��)���m(x��)���20A ����20��犣���{(di��o)�������ã��@�ӵı��F(xi��n)��ȫ�����S���ˡ��ٴ������](m��i)�l���y(c��)ԇ�ˣ��ҵ�ֱ���Դֻ���ṩ��20A���������N����(sh��)�(y��n)�r(sh��)����{(di��o)���ӈDƬ��* ��{(di��o)�y(c��)ԇ�壬�����_(d��)2212A늙C(j��)��KV930
���@���ֹ�����S�w�����ęC(j��)�ܺ��b�����P(gu��n)�DƬ���N���ˣ��R�R��������һ�c(di��n)�DƬ���f(shu��)���C(j��)е�Y(ji��)��(g��u)��(du��)��λ���������_(d��)�ˁ�(l��i)�f(shu��)��������������Ҳ�Ͳ����M(f��i)������ �������������S�w�����C(j��)�ܺ�������P(gu��n)�O(sh��)������Ѵ�ɣ�����(l��i)�����S���`�겿��---�w��+��{(di��o)�ˡ���ʲô��{(di��o)Ҳ�������S���`�겿����?��?y��n)����SҪ�õ���{(di��o)��߀��������ͬ�ġ������������꣬�� (t��ng)����������(l��i)���������f(shu��)�w�صĺ��ĽM�ɺʹ��ԭ�������S�w��������(du��)�ڳ�Ҏ(gu��)��ģ��(l��i)�f(shu��)�������(f��)�s�ľ�����Ӳ����ˡ�֮�������w�еúܷ�(w��n)����ȫ����ӿ��Ʋ��ֵĹ��ڡ��ڳ�Ҏ(gu��)�̶����w�C(j��)�ϣ����݃x���dz���������������(du��)�ٿ��y�ȴ��c(di��n)��ֱ�C(j��)�ϣ���������Ԅ�(d��ng)��(w��n)��ϵ�y(t��ng)��Ҳֻ���iβ���õ����݃x�����S�w�����c�䲻ͬ�ĵط��DZ��������݃x���@�������Ҫ��Ȼ�o(w��)���w�У���Մ�����w��(w��n)�ˡ�����Ҫ�У�߀����3�S��(X��Y��Z)�����У��@�����S�w�����ęC(j��)е�Y(ji��)��(g��u)����(d��ng)���M�����ԛQ���ġ��ڴ˻��A(ch��)�����o��3�S���ٶȂ��������@6��(g��)���ɶȣ��ͽM�����w���ˑB(t��i)��(w��n)���Ļ������֣�Ҳ���P(gu��n)�I���IJ���---�T�Ԍ�(d��o)��ģ�K����(ji��n)�QIMU���w���е��ˑB(t��i)�Мy(c��)ȫ���@��(g��)IMU�ˣ���Ҋ(ji��n)��������ģ�͵ĺ��IJ������������f(shu��)�f(shu��)��{(di��o)�����S�w�������Ă�(g��)��(�����M(f��i)Ԓ:em15: )���Ƀ�����(du��)��ʮ�ֽ���Y(ji��)��(g��u)���ژ����D(zhu��n)���Ϸ����D(zhu��n)�ͷ��D(zhu��n)���@�ӿɵ���ģ�����������D(zhu��n)��ÿ��(g��)����ֱ����С��ͨ����10�����ҡ��Ă�(g��)���D(zhu��n)��(d��ng)�r(sh��)���x�����Ƿ�ɢ�ġ�����ֱ�C(j��)�Ę���ֻ��һ��(g��)�ܮa(ch��n)�����е��x�����γ��������|(zh��)�đT���x���������֙C(j��)�������ܿ�Ă�(c��)����������ͨ���õ��Ķ�C(j��)������̖(h��o)�����l�ʺܵ͡����S�����܉���ٷ���(y��ng)���ԑ�(y��ng)��(du��)�ˑB(t��i)׃��������h�ƣ���Ҫ�߷���(y��ng)�ٶȵ���{(di��o)����Ҏ(gu��)PPM��{(di��o)�ĸ����ٶ�ֻ��50Hz���ң��M�㲻���@�N��������Ҫ���ٶȣ���PPM��{(di��o)MCU��(n��i)��PID��(w��n)�ٿ��ƣ��܌�(du��)��Ҏ(gu��)��ģ�ṩ혻����D(zhu��n)��׃�����ԣ��������S�ϾͲ����m�ˣ����S��Ҫ���ǿ��ٷ���(y��ng)��늙C(j��)�D(zhu��n)��׃�����ø��ٌ�����{(di��o)��IIC�����ӿڂ��Ϳ�����̖(h��o)�����_(d��)��ÿ��װ���ǧ�ε�늙C(j��)�D(zhu��n)��׃���������S�w�Еr(sh��)���ˑB(t��i)�r(sh��)���܉ַ�(w��n)������ʹ�ܵ�����ͻȻ�_�������f��Ȼ�o(w��)�����������ǂ�(g��)�Є�(d��ng)��+��(sh��)���ɣ�������������Ƿ�ѣ��x���r(sh��)�����c(di��n)�����ĵġ���ݡ������߀�o�ώ��ˡ�߀���ÈDƬ�f(shu��)Ԓ�ɣ��@�Ӂ�(l��i)��ֱ���c(di��n)����������(l��i)��IIC������{(di��o)���@��(g��)Ҳ������ͨ�^(gu��)�y(c��)ԇ���������Ʋ������ɹ��ġ���ǰ����һ��(g��)�����аl(f��)�^(gu��)��һ�r(sh��)�Ҳ����ˡ����S�w���������C(j��)����+3S䇾�늳�ͨ����800g���£���ͣ���������^(gu��)12A����?j��n)���ÿ��(g��)��{(di��o)��Ҳ��3��4A��������]�����ܳ��F(xi��n)�ęC(j��)���ˑB(t��i)���(d��ng)�B(t��i)׃������r����(g��)��{(di��o)���ṩ25A�ķ�ֵ���������ˡ�������������{(di��o)ֻ����6��(g��)MOS�ܣ��y(c��)ԇ�^(gu��)���C(j��)���m(x��)���20A ����20��犣���{(di��o)�������ã��@�ӵı��F(xi��n)��ȫ�����S���ˡ��ٴ������](m��i)�l���y(c��)ԇ�ˣ��ҵ�ֱ���Դֻ���ṩ��20A���������N����(sh��)�(y��n)�r(sh��)����{(di��o)���ӈDƬ��* ��{(di��o)�y(c��)ԇ�壬�����_(d��)2212A늙C(j��)��KV930 * ȫ��ʹ��N-MOS��TO-220���b
* ȫ��ʹ��N-MOS��TO-220���b 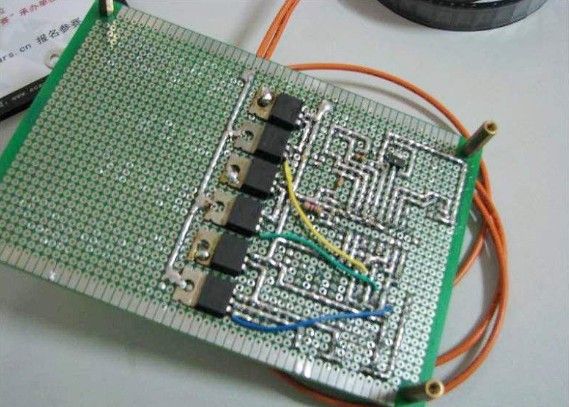 * �y(c��)ԇ�õ�15V20Aֱ���Դ
* �y(c��)ԇ�õ�15V20Aֱ���Դ  �����(l��i)����� �������������{(di��o)����������{(di��o)���õĸ��l늽���ݣ���ǰ�](m��i)���|�^(gu��)�@Щ�|�������Ե�߀�и��l����@���¡�����{(di��o)�������Зl�w�������Á�(l��i)�y(c��)ԇ�ģ�����ʹ��������������1.��{(di��o)�庸������
�����(l��i)����� �������������{(di��o)����������{(di��o)���õĸ��l늽���ݣ���ǰ�](m��i)���|�^(gu��)�@Щ�|�������Ե�߀�и��l����@���¡�����{(di��o)�������Зl�w�������Á�(l��i)�y(c��)ԇ�ģ�����ʹ��������������1.��{(di��o)�庸������ 2.��{(di��o)�巴��
2.��{(di��o)�巴�� 3.���m(x��)������_(d��)14A����
3.���m(x��)������_(d��)14A���� 4.��{(di��o)�庸������
4.��{(di��o)�庸������ 5.��{(di��o)�巴��
5.��{(di��o)�巴�� 6.��{(di��o)PCB���ĉKһ��
6.��{(di��o)PCB���ĉKһ��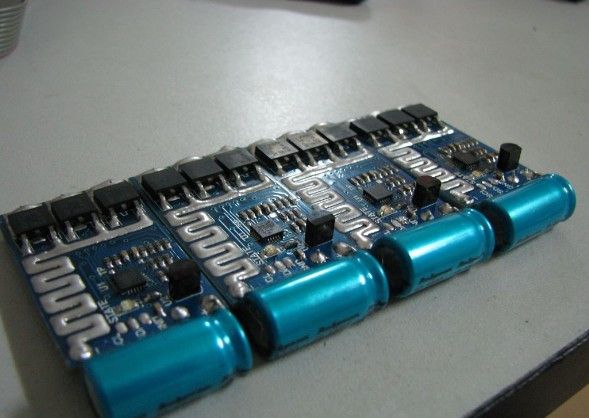 �w�ذ�Ҳ���깤��ԓ���ψDƬ�ˡ��w�ذ�ĺ��ľ���IMU�T��(d��o)ģ�K�����NIMU�İɡ�IMU�����S���݃x�����S���ٶ�Ӌ(j��)�f(xi��)ͬ�M�ɣ�������(g��)�w�ذ���������ģ�͵ĺ��ģ�����������߂��w�з�(w��n)��������l���������w�����ܵ�����������w�،�(sh��)�F(xi��n)�ijɹ��ʣ����݃x�x����MEMS��ˇ��LISY300AL��300��/��Мy(c��)���̣�����늉�3V3�����w�ص�CPU����늉�һ�£���ADC�ɼ����݃x��ݔ����̖(h��o)�����ٶ�Ӌ(j��)��IIC�ӿڵ�LIS3LV02DQ��ÿ��(g��)�Мy(c��)�S�����O(sh��)���S�L��(d��ng)�|�l(f��)���ܣ��Á�(l��i)�Мy(c��)�w�����ˑB(t��i)�L�D(zhu��n)�����w��ʧ�ؕr(sh��)���|�l(f��)������b�ã�ʹ�w������ȫ��ꑡ��˹���������x�(xi��ng)������һ߅���������ȏ��(ji��n)�εĹ����������ڂ�(g��)�����������ܲ��������̫�࣬����Ŀ��(bi��o)̫�ߌ�(du��)����ʧȥ���ġ�7.IMUģ�KPCB�ߴ�
�w�ذ�Ҳ���깤��ԓ���ψDƬ�ˡ��w�ذ�ĺ��ľ���IMU�T��(d��o)ģ�K�����NIMU�İɡ�IMU�����S���݃x�����S���ٶ�Ӌ(j��)�f(xi��)ͬ�M�ɣ�������(g��)�w�ذ���������ģ�͵ĺ��ģ�����������߂��w�з�(w��n)��������l���������w�����ܵ�����������w�،�(sh��)�F(xi��n)�ijɹ��ʣ����݃x�x����MEMS��ˇ��LISY300AL��300��/��Мy(c��)���̣�����늉�3V3�����w�ص�CPU����늉�һ�£���ADC�ɼ����݃x��ݔ����̖(h��o)�����ٶ�Ӌ(j��)��IIC�ӿڵ�LIS3LV02DQ��ÿ��(g��)�Мy(c��)�S�����O(sh��)���S�L��(d��ng)�|�l(f��)���ܣ��Á�(l��i)�Мy(c��)�w�����ˑB(t��i)�L�D(zhu��n)�����w��ʧ�ؕr(sh��)���|�l(f��)������b�ã�ʹ�w������ȫ��ꑡ��˹���������x�(xi��ng)������һ߅���������ȏ��(ji��n)�εĹ����������ڂ�(g��)�����������ܲ��������̫�࣬����Ŀ��(bi��o)̫�ߌ�(du��)����ʧȥ���ġ�7.IMUģ�KPCB�ߴ�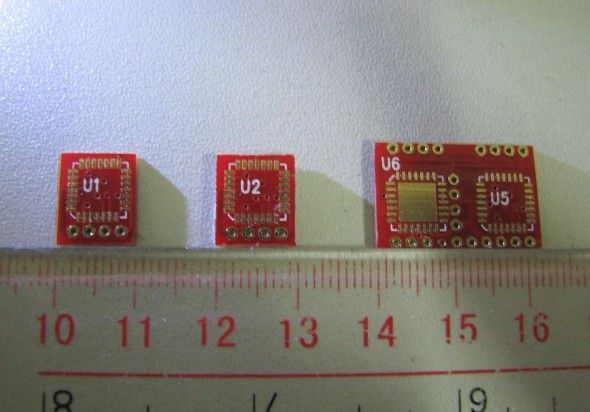 8.IMUģ�K�M�b�õĘ���
8.IMUģ�K�M�b�õĘ���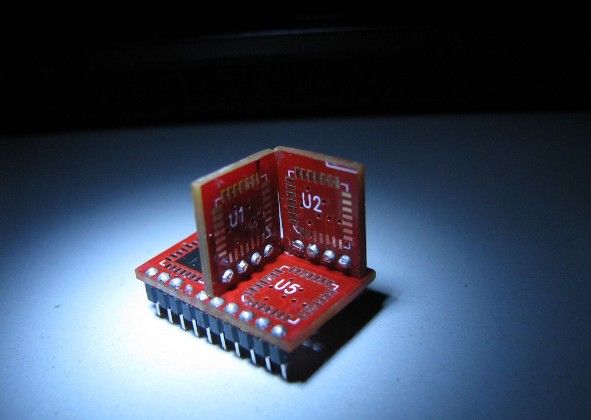 9.�@߅�Ǽ���Ӌ(j��)
9.�@߅�Ǽ���Ӌ(j��) ���x�͵�ST���݃x��(d��ng)�r(sh��)�Ј�(ch��ng)�ϛ](m��i)�F(xi��n)؛���ҵ�һ�Ҵ�؛��˾ֱ�ӏ�STԭ�S�I�M(j��n)���r(ji��)����F���ڱ����o(w��)�������еȴ������L(zh��ng)�ăɂ�(g��)���ں������õ��ˡ�10.ST���݃xоƬ
���x�͵�ST���݃x��(d��ng)�r(sh��)�Ј�(ch��ng)�ϛ](m��i)�F(xi��n)؛���ҵ�һ�Ҵ�؛��˾ֱ�ӏ�STԭ�S�I�M(j��n)���r(ji��)����F���ڱ����o(w��)�������еȴ������L(zh��ng)�ăɂ�(g��)���ں������õ��ˡ�10.ST���݃xоƬ  11.LISY300AL
11.LISY300AL  12.MEMS���S���݃x
12.MEMS���S���݃x 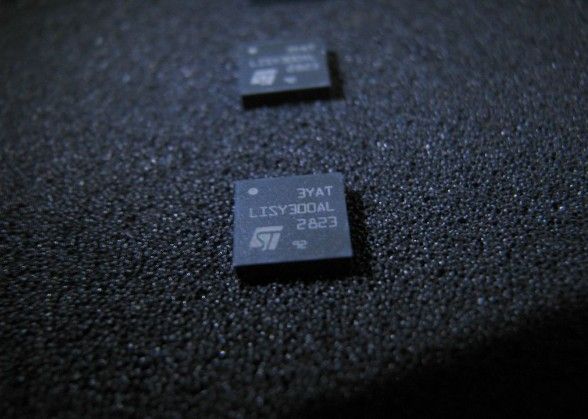 13.LGA28���b
13.LGA28���b 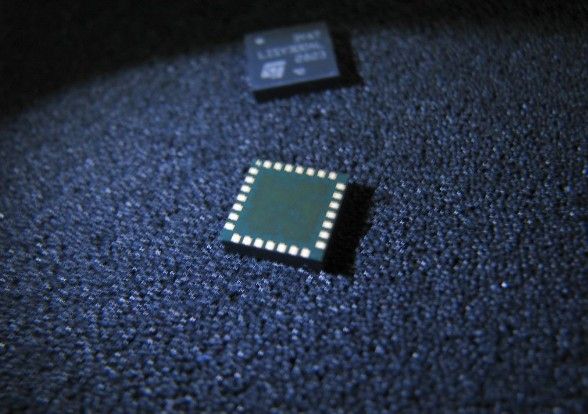 14.3�S���݃x��ģ�M�S��
14.3�S���݃x��ģ�M�S�� 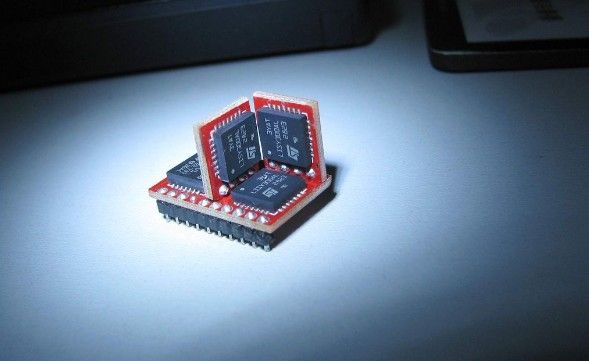 15.3�S����Ӌ(j��)��ʹ��IIC�ӿ�
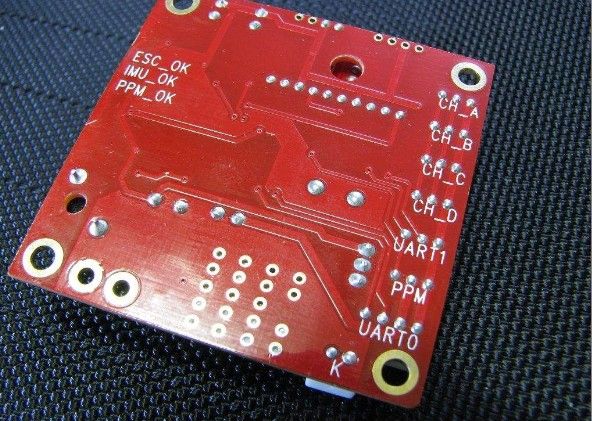
15.3�S����Ӌ(j��)��ʹ��IIC�ӿ�  ȫ���깤���w�ذ塣 ���Ͻӿڹ�Ӌ(j��)��4·��{(di��o)��1·PPMݔ�롢2·UARTͨ�Ŵ��ڣ��ɽӔ�(sh��)����_(t��i)��GPS������һ·�ɿص�11Vݔ�����Á�(l��i)�Ӹ���LED�l(f��)��l��ҹ�����á� ���Q����������Ҫ����ʾ���ã�늳ص�늕r(sh��)��ͨ�^(gu��)�l(f��)�����Ѳ�������Ҫ��ꑸ��Q늳��ˡ�16. �w�ذ����Ч���D
ȫ���깤���w�ذ塣 ���Ͻӿڹ�Ӌ(j��)��4·��{(di��o)��1·PPMݔ�롢2·UARTͨ�Ŵ��ڣ��ɽӔ�(sh��)����_(t��i)��GPS������һ·�ɿص�11Vݔ�����Á�(l��i)�Ӹ���LED�l(f��)��l��ҹ�����á� ���Q����������Ҫ����ʾ���ã�늳ص�늕r(sh��)��ͨ�^(gu��)�l(f��)�����Ѳ�������Ҫ��ꑸ��Q늳��ˡ�16. �w�ذ����Ч���D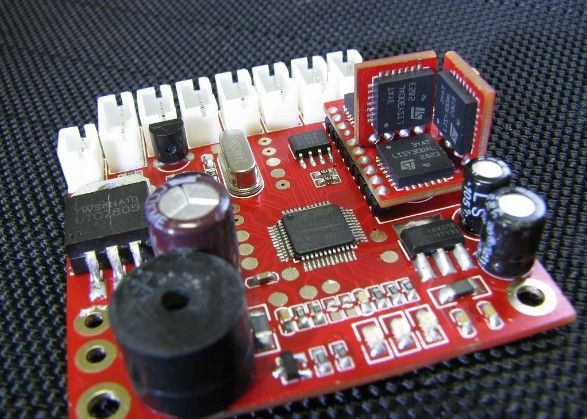




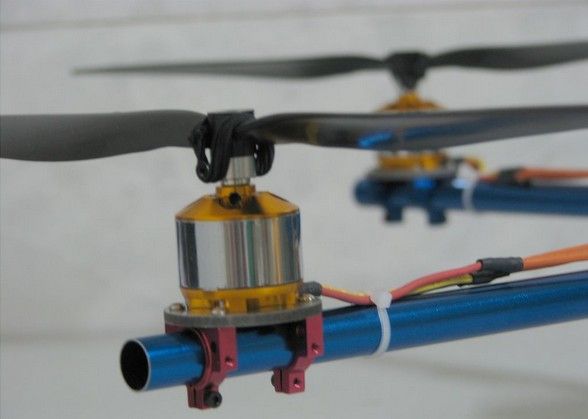
 ���b��ɵĘ���
���b��ɵĘ���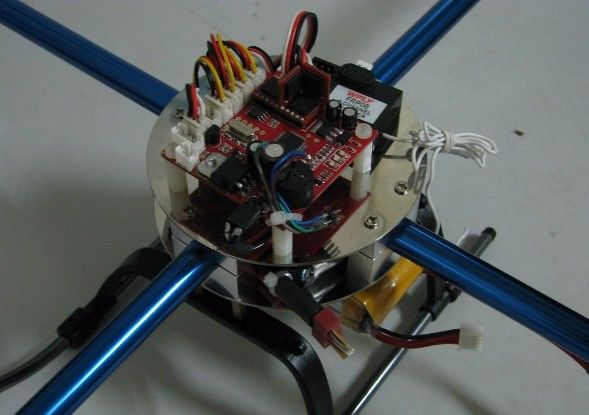 늳ؒ������ļ����棬�Ï�������ħ�g(sh��)�N�̶�
늳ؒ������ļ����棬�Ï�������ħ�g(sh��)�N�̶�  �������Ă�(g��)�����_�ܣ���ֹ�^(gu��)��ˤ�C(j��)
�������Ă�(g��)�����_�ܣ���ֹ�^(gu��)��ˤ�C(j��) ����(g��)�D�ρ�(l��i)�ɣ��ܶ��˸㲻�������S�w������������D(zhu��n)�w�С�Ҫע����ǣ�4��(g��)���փɽM��һ�M������һ�M�������ɽM�����F(xi��n)�D(zhu��n)�ٲ��ô��(d��ng)ƽ��͛](m��i)�ˣ��w������(du��)��ʬF(xi��n)���w���D(zhu��n)��������(j��)�����������D(zhu��n)�ٲ�ͬ����(sh��)�F(xi��n)����������
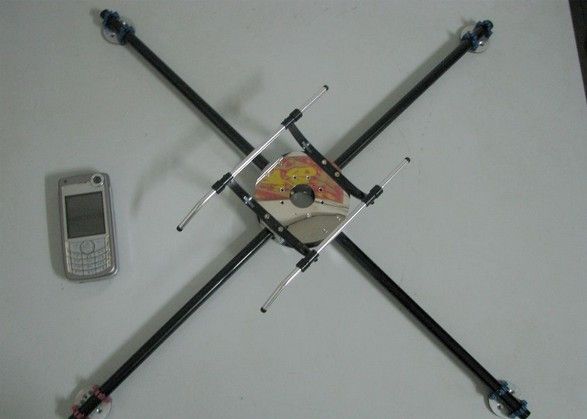
����(g��)�D�ρ�(l��i)�ɣ��ܶ��˸㲻�������S�w������������D(zhu��n)�w�С�Ҫע����ǣ�4��(g��)���փɽM��һ�M������һ�M�������ɽM�����F(xi��n)�D(zhu��n)�ٲ��ô��(d��ng)ƽ��͛](m��i)�ˣ��w������(du��)��ʬF(xi��n)���w���D(zhu��n)��������(j��)�����������D(zhu��n)�ٲ�ͬ����(sh��)�F(xi��n)���������� ǰ���������С�^(q��)�@���(ch��ng)�w���S����(d��ng)�r(sh��)��2��(j��)���ҵ��L(f��ng)�����w�ڶ��K늳ؕr(sh��)�](m��i)���ƺø߶ȣ������˂�(g��)�B�m(x��)���D(zhu��n)ƽ�w�Ą�(d��ng)�������S���L(f��ng)�����h�h(yu��n)�ˣ��ۿ���Ҫײ�ϘǷ��ˣ�һ�r(sh��)�鼱�y�����_���](m��i)���ƺá����Sײ�Ϸ��Ӻ��4�Әǵĸ߶�ֱ�ӵ���(l��i)��ˤ����ˮ������ϣ��C(j��)��ˤ�p��(y��n)�ء����ҵ����w�ذ塢��{(di��o)��늙C(j��)��늳ض��](m��i)�܂����@����������������һ����p�ęC(j��)�ܣ�ģ��MK�ĽY(ji��)��(g��u)�����X(ju��)�@�Ӻ�(ji��n)�εIJŌ�(sh��)�ã����ֱ��������ęC(j��)�ܣ�����Ư��������r(ji��)̫�F�ˡ�ˤ�ĵęC(j��)�ܣ��^(gu��)�����ٿ����ܷ��ޏ�(f��)������02.̼�w���S�w����
ǰ���������С�^(q��)�@���(ch��ng)�w���S����(d��ng)�r(sh��)��2��(j��)���ҵ��L(f��ng)�����w�ڶ��K늳ؕr(sh��)�](m��i)���ƺø߶ȣ������˂�(g��)�B�m(x��)���D(zhu��n)ƽ�w�Ą�(d��ng)�������S���L(f��ng)�����h�h(yu��n)�ˣ��ۿ���Ҫײ�ϘǷ��ˣ�һ�r(sh��)�鼱�y�����_���](m��i)���ƺá����Sײ�Ϸ��Ӻ��4�Әǵĸ߶�ֱ�ӵ���(l��i)��ˤ����ˮ������ϣ��C(j��)��ˤ�p��(y��n)�ء����ҵ����w�ذ塢��{(di��o)��늙C(j��)��늳ض��](m��i)�܂����@����������������һ����p�ęC(j��)�ܣ�ģ��MK�ĽY(ji��)��(g��u)�����X(ju��)�@�Ӻ�(ji��n)�εIJŌ�(sh��)�ã����ֱ��������ęC(j��)�ܣ�����Ư��������r(ji��)̫�F�ˡ�ˤ�ĵęC(j��)�ܣ��^(gu��)�����ٿ����ܷ��ޏ�(f��)������02.̼�w���S�w���� 03.�e���e(cu��)�ˣ��ǃɂ�(g��)
03.�e���e(cu��)�ˣ��ǃɂ�(g��) 04.���ļ��������ݽz�̶�
04.���ļ��������ݽz�̶� 05.�Q��(g��)�Ƕ�
05.�Q��(g��)�Ƕ� 06.�@��Ҫ�b늳أ��ݽz���^(gu��)��(l��i)�b
06.�@��Ҫ�b늳أ��ݽz���^(gu��)��(l��i)�b 07.�C(j��)�ܵă���
07.�C(j��)�ܵă���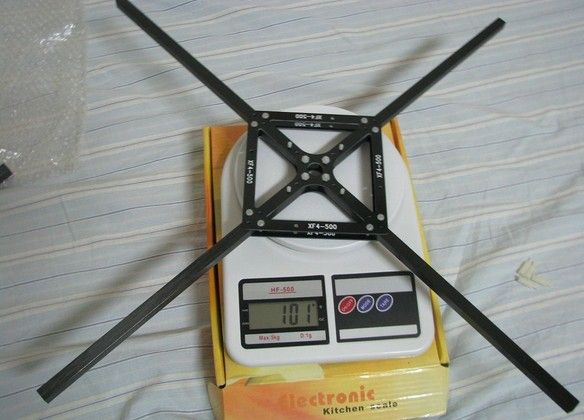 08.�ɂ�(g��)һ�������
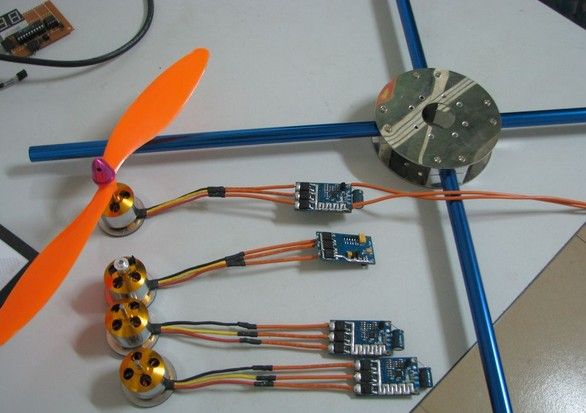
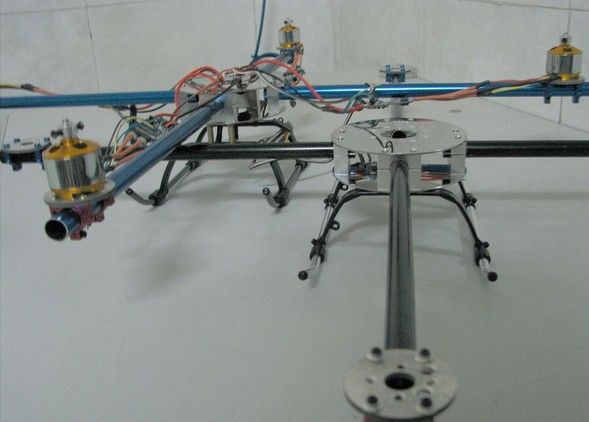
08.�ɂ�(g��)һ�������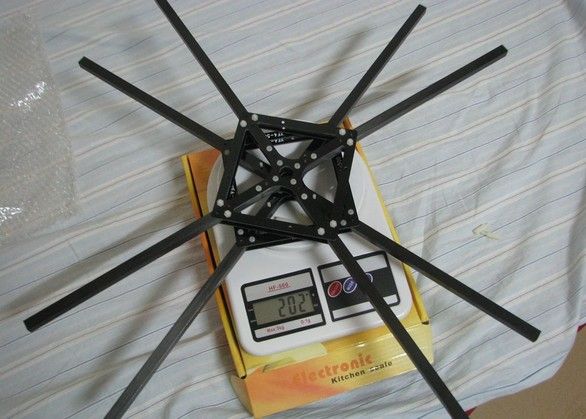 ��09.���I��XXD2212늙C(j��)
��09.���I��XXD2212늙C(j��) ��10.�b��늙C(j��)�������
��10.�b��늙C(j��)������� ��11.�º�����{(di��o)��
��11.�º�����{(di��o)�� ��12.�º�����{(di��o)��
��12.�º�����{(di��o)�� 13.�b����{(di��o)���w�ذ�
13.�b����{(di��o)���w�ذ� ��14.�w�ذ�
��14.�w�ذ� 15.�b���ˣ���늿���Ч��
15.�b���ˣ���늿���Ч�� ��16.��(l��i)��(g��)�����x��
��16.��(l��i)��(g��)�����x�� �C(j��)���·���֏ص��깤�ˣ�ʣ���_�ܕ��r(sh��)�](m��i)�뵽�÷������](m��i)������ȥ���������҃�(n��i)ԇ�w�������C(j��)���Пo(w��)��(w��n)���Ԇ�(w��n)�}�����w2��犺�������(bi��o)�����݃x�����c(di��n)���ٴ��w���У�һ�r(sh��)����ײ���˵��ӣ�Сըһ�£�ϴ�·۴��ӑK����Ƥ���������������M(j��n)����Z�S�B�m(x��)���D(zhu��n)ƽ�w�y(c��)ԇ��Ч����֮ǰ�д���M(j��n)�����u�U�ٿ��ָ��`�������S����(y��ng)��(d��ng)�����������L(f��ng)����Ҳ�����@��ߡ���ͣ���F(xi��n)߀��̫�M�⣬�b��?z��)o������r�����L(zh��ng)�ܱ���5��6�벻Ư�ƣ����^�m(x��)Ŭ�����������C(j��)SD���ĵ����o(w��)�������w���^(gu��)�̡����������˵IJ���ˮƽ����������҃�(n��i)�y(c��)ԇƫ���ж�Ч���ܝM�⣬���g̫С���B�m(x��)����ˮƽ���D(zhu��n)�Ą�(d��ng)���](m��i)���y(c��)ԇ���´��a���������늟o(w��)�b����̖(h��o)�澯���w�����b����̖(h��o)�Gʧ�r(sh��)�澯���w�C(j��)�ص�ˮƽ�ˑB(t��i)��(zh��)���Ԅ�(d��ng)�����(d��ng)�����@��(g��)������Ҫ������y(c��)ԇ���y(c��)ԇ�ĵ�ҕ�l��ܛ�������D(zhu��n)RM������(l��i)�ĈD��K���̶ã�ԇ��N�N������ʽ���ھW(w��ng)�����˺Î�ҕ�l���ھ�ܛ����Ҫô�����ã�Ҫô�D(zhu��n)����(l��i)�ĈD��һ����Ϳ��һֱ�ϵ����죬����Ū�����c(di��n)���ӡ����ҵ�ȫ���ٙC(j��)�����b����(l��i)�ˣ�����̼�w�����ѣ�������̫�F�����қ](m��i)�з��εģ�߀���X�܁�(l��i)�Ì�(sh��)�ڣ�
�C(j��)���·���֏ص��깤�ˣ�ʣ���_�ܕ��r(sh��)�](m��i)�뵽�÷������](m��i)������ȥ���������҃�(n��i)ԇ�w�������C(j��)���Пo(w��)��(w��n)���Ԇ�(w��n)�}�����w2��犺�������(bi��o)�����݃x�����c(di��n)���ٴ��w���У�һ�r(sh��)����ײ���˵��ӣ�Сըһ�£�ϴ�·۴��ӑK����Ƥ���������������M(j��n)����Z�S�B�m(x��)���D(zhu��n)ƽ�w�y(c��)ԇ��Ч����֮ǰ�д���M(j��n)�����u�U�ٿ��ָ��`�������S����(y��ng)��(d��ng)�����������L(f��ng)����Ҳ�����@��ߡ���ͣ���F(xi��n)߀��̫�M�⣬�b��?z��)o������r�����L(zh��ng)�ܱ���5��6�벻Ư�ƣ����^�m(x��)Ŭ�����������C(j��)SD���ĵ����o(w��)�������w���^(gu��)�̡����������˵IJ���ˮƽ����������҃�(n��i)�y(c��)ԇƫ���ж�Ч���ܝM�⣬���g̫С���B�m(x��)����ˮƽ���D(zhu��n)�Ą�(d��ng)���](m��i)���y(c��)ԇ���´��a���������늟o(w��)�b����̖(h��o)�澯���w�����b����̖(h��o)�Gʧ�r(sh��)�澯���w�C(j��)�ص�ˮƽ�ˑB(t��i)��(zh��)���Ԅ�(d��ng)�����(d��ng)�����@��(g��)������Ҫ������y(c��)ԇ���y(c��)ԇ�ĵ�ҕ�l��ܛ�������D(zhu��n)RM������(l��i)�ĈD��K���̶ã�ԇ��N�N������ʽ���ھW(w��ng)�����˺Î�ҕ�l���ھ�ܛ����Ҫô�����ã�Ҫô�D(zhu��n)����(l��i)�ĈD��һ����Ϳ��һֱ�ϵ����죬����Ū�����c(di��n)���ӡ����ҵ�ȫ���ٙC(j��)�����b����(l��i)�ˣ�����̼�w�����ѣ�������̫�F�����қ](m��i)�з��εģ�߀���X�܁�(l��i)�Ì�(sh��)�ڣ� ����ˢ늙C(j��)���������w����������Ʒ�w�������b��(sh��)�F(xi��n)���w�з�(w��n)�����ֿ����p��Ó�ء���ĭ�Ė|�|��������(l��i)���а�ȫ�� ���r��߀�И����o(h��)Ȧ����ˢ늙C(j��)+�p�ٽM��Ч���ஔ(d��ng)���e(cu��)��һ�K�M늵� 3S 1500mA 늳ؿ��Գ��m(x��)�w��18��犡��ł�(g��)��ˢ�ij���(l��i)�o��ғQ�Q���X(ju��)���������b��ɵ���ˢ늙C(j��)���������w����
����ˢ늙C(j��)���������w����������Ʒ�w�������b��(sh��)�F(xi��n)���w�з�(w��n)�����ֿ����p��Ó�ء���ĭ�Ė|�|��������(l��i)���а�ȫ�� ���r��߀�И����o(h��)Ȧ����ˢ늙C(j��)+�p�ٽM��Ч���ஔ(d��ng)���e(cu��)��һ�K�M늵� 3S 1500mA 늳ؿ��Գ��m(x��)�w��18��犡��ł�(g��)��ˢ�ij���(l��i)�o��ғQ�Q���X(ju��)���������b��ɵ���ˢ늙C(j��)���������w����
 ɭ�ִ���ܲ��ܷ����¿��ƴ��a������
ɭ�ִ���ܲ��ܷ����¿��ƴ��a������| �gӭ���R (http://www.raoushi.com/bbs/) | Powered by Discuz! X3.1 |