第八屆全國大學生“飛思卡爾”杯智能汽車競賽
競速比賽規則與賽場紀律
參賽選手須使用競賽秘書處統一指定的競賽車模套件,采用飛思卡爾半導體公司的8位、16位、32位微控制器作為核心控制單元,自主構思控制方案進行系統設計,包括傳感器信號采集處理、電機驅動、轉向舵機控制以及控制算法軟件開發等,完成智能車工程制作及調試,于指定日期與地點參加各分(省)賽區的場地比賽,在獲得決賽資格后,參加全國決賽區的場地比賽。參賽隊伍的名次(成績)由賽車現場成功完成賽道比賽時間來決定,參加全國總決賽的隊伍同時必須提交車模技術報告。大賽根據道路檢測方案不同分為電磁、光電平衡與攝像頭三個賽題組。使用四輪車模通過感應由賽道中心電線產生的交變磁場進行路經檢測的屬于電磁組;使用四輪車模通過采集賽道圖像(一維、二維)或者連續掃描賽道反射點的方式進行進行路經檢測的屬于攝像頭組;使用指定兩輪車模保持車體直立行走的車模屬于平衡組。
競賽秘書處制定如下比賽規則適用于各分(省)賽區比賽以及全國總決賽,在實際可操作性基礎上力求公正與公平。
一、器材限制規定
1. 須采用統一指定的車模。本屆比賽指定采用三種車模,分別用于三個賽題組:
| 編號 | 車模外觀和規格 | 賽題組 | 供應廠商 |
| A型車模 | 
車模:G768 電機:RS380-ST/3545, 舵機:FUTABA3010 | 電磁組 | 東莞市博思電子數碼科技有限公司 |
| B型車模 | 車模型號 電機:540,伺服器:S-D5 | 攝像頭組 | 北京科宇通博科技有限公司 |
| D型車模 | 電機RN-260
| 光電平衡車組 | 東莞市博思電子數碼科技有限公司 |

各賽題組車模運行規則:
(a)電磁組:四輪車模正常運行。
車模使用A型車模。車模運行方向為:轉向輪在前,動力輪在后,如圖1所示:
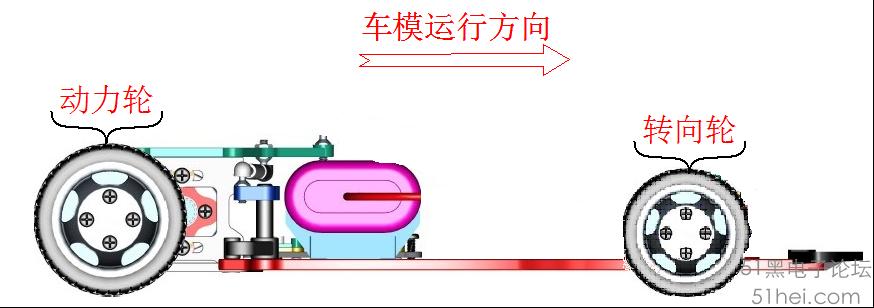
圖1電四輪車模運行模式
(b) 攝像頭組:車模反方向運行。
車模使用B型車模。車模運行方向為:動力輪在前,轉向輪在后,如圖2所示:
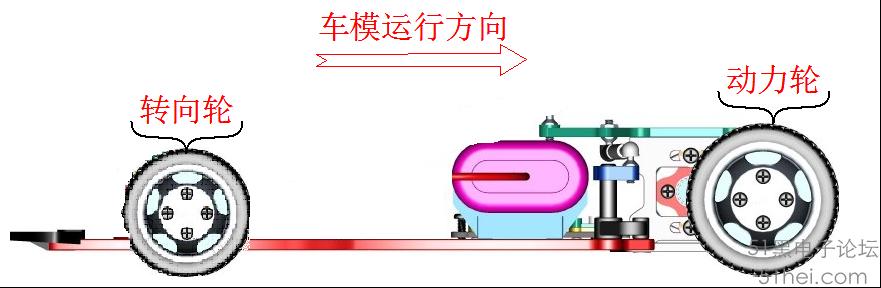
圖2攝車模運行模式
(3)光電平衡組:車模直立行走。
使用D型車模。車模運行時只允許動力輪著地,車模直立行走。車模運行方向應按照圖3所示:
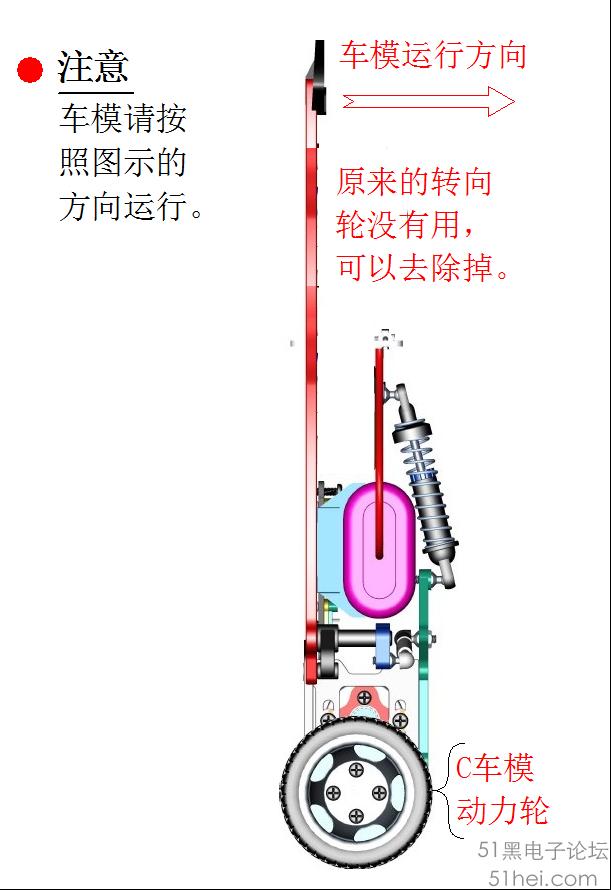
圖3光平衡組車模運行模式
l細節及改動限制見附件一。
2. 須采用飛思卡爾半導體公司的8位、16位、32位處理器作為唯一的微控制器。
l有關細節及其它電子器件使用的限制見附件二;
3. 三個賽題組使用傳感器限制:
l參加電磁賽題組不允許使用光學傳感器獲得道路的光學信息,但是可以使用光電碼盤測量車速;
l參加光電平衡組的車模可以使用光電傳感器、指定型號的線性CCD傳感器進行道路檢測,禁止使用激光傳感器。
光電平衡組若采用線性CCD,需使用TexasAdvanced Optoelectronic Solution公司的TSL1401系列的線性CCD,如下圖所示:
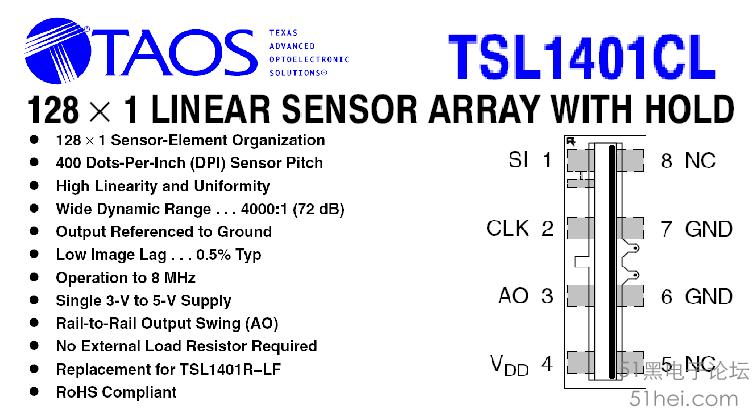
圖4線陣CCD型號
l參加攝像頭賽題組可以使用光電管作為輔助檢測手段;
l非電磁組的賽道沒有電磁信號;
4. 其他事項
l如果車模中禁止改動的部件發生損壞,需要使用相同型號的部件替換;
l攝像頭組車模改裝完畢后,車模尺寸不能超過:250mm 寬和400mm長。電磁組車模改裝完畢后,車模尺寸寬度不超過250mm,長度沒有限制。
二、有關賽場的規定
1. 賽道基本參數(不包括拐彎點數、位置以及整體布局)見附件三;
2. 比賽賽道實際布局將在比賽當日揭示,在賽場內將安排采用與制作實際賽道相同的材料所做的測試賽道供參賽隊進行現場調試;
三、裁判及技術評判
競賽分為分賽區(省賽區)和全國總決賽兩個階段。其中,全國總決賽階段是在全國競賽組委會秘書處指導下,與決賽承辦學校共同成立競賽執行委員會,下轄技術組、裁判組和仲裁委員會,統一處理競賽過程中遇到的各類問題。
全國和分賽區(省賽區)競賽組織委員會工作人員,包括技術評判組、現場裁判組和仲裁組成員均不得在現場比賽期間參與任何針對個別參賽隊的指導或輔導工作,不得泄露任何有失公允競賽的信息。在現場比賽的時候,組委會可以聘請參賽隊伍帶隊教師作為車模檢查監督人員。
在分賽區(省賽區)階段中,裁判以及技術評判由各分賽區(省賽區)組委會參照上述決賽階段組織原則實施。
四、分賽區、總決賽比賽規則
分賽區和總決賽的比賽規則相同,都具有電磁組、光電平衡組和攝像頭組三各賽題組比賽。三個賽題組比賽原則上在同一個場館同時進行,所遵循的比賽規則也基本相同的。三個賽題組分別獨立進行成績排名。
分賽區和總決賽的現場比賽均包括初賽與決賽兩個階段。下面列出的現場預賽、決賽階段的比賽規則適用于各分賽區及總決賽的三個賽題組。
1.初賽與決賽規則
1) 初賽階段規則
i. 比賽場中有三條賽道。
ii. 參賽隊根據比賽題目分為三個組,并以抽簽形式決定組內比賽次序。
iii. 比賽分為兩輪,三個賽題組同時在三個賽道上進行比賽,每支參賽隊伍可以在每輪比賽之前有10分鐘的現場調整時間。在此期間,參賽隊伍只允許對賽車的硬件(不包括微控制器芯片)進行調整。第二輪比賽在同一賽道沿逆向進行。
iv. 在每輪比賽中,選手首先將賽車放置在起跑區域內賽道上,賽車至少靜止兩秒鐘后自動啟動。光電平衡組車模需要等選手離開車模至少兩秒鐘后自動啟動運行,在此期間車模必須停留在起跑線后一米的起跑區內。
v. 每輛賽車在賽道上跑一圈,以計時起始線為計時點,跑完一圈后賽車需要自動停止在起始線之后三米之內的賽道內,如果沒有停止在規定的區域內,比賽計時成績增加1秒。電磁組和攝像頭組的車模停止時至少保證有三個車輪接觸賽道,光電平衡組需要保證兩個車輪接觸賽道。光電平衡組車模停止運行時不要求保持平衡直立狀態,可以傾斜在賽道上。
vi. 每輛賽車以在兩個單輪成績中較好的一個作為賽車最終初賽成績;計時由電子計時器完成并實時顯示。
vii. 根據參賽隊伍數量,由比賽組委會根據成績選取一定比例的隊伍晉級決賽。
viii. 晉級決賽的賽車在決賽前有10分鐘的調整時間。在此期間,參賽隊伍只允許對賽車的硬件(不包括微控制器芯片)進行調整。技術評判組將對全部晉級的賽車進行現場技術檢查,如有違反器材限制規定的(指本規則之第一條)立即取消決賽資格,由后備首名晉級代替。
ix. 由裁判組申報組織委員會批準公布決賽名單。
x. 全部車模在整個比賽期間都統一放置在車模的展示區內。
2)決賽階段規則
i. 參加決賽隊伍按照預賽成績進行排序,比賽順序按照預賽成績的倒序進行。
ii. 決賽的比賽場地使用一個賽道。決賽賽道與預賽賽道形狀不同,占地面積會增大,賽道長度會增加。電磁組可能另外單獨鋪設跑道。
iii. 每支決賽隊伍只有一次比賽機會,在跑道上跑一圈,比賽過程與要求同預賽階段。
iv. 計時由電子計時器完成并實時顯示。
v. 預賽成績不記入決賽成績,只決定決賽比賽順序。沒有參加決賽階段比賽的隊伍,預賽成績為最終成績,參加該賽題組的排名。
2. 比賽過程規則
按照比賽順序,裁判員指揮參賽隊伍順序進入場地比賽。同一時刻,一個場地上只有一支隊伍進行比賽。
在裁判員點名后,每隊指定一名隊員持賽車進入比賽場地。參賽選手有60秒的現場準備時間。準備好后,裁判員宣布比賽開始,選手將賽車放置在起跑區內,即賽車的任何一部分都不能超過計時起始線。賽車應在起跑區靜止兩秒鐘以上,然后自動出發。賽車應該在30秒之內離開出發區,沿著賽道跑完一圈。由計時起始線傳感器進行自動計時。賽車跑完一圈且自動停止后,選手拿起賽車離開場地,將賽車放置回指定區域。
如果比賽完成,由計算機評分系統自動給出比賽成績。
3.比賽犯規與失敗規則
比賽過程中,由比賽現場主裁判根據統一的規則對于賽車是否沖出跑道進行裁定。賽車前兩次沖出跑道時,由裁判員取出賽車交給比賽隊員,立即在起跑區重新開始比賽。選手也可以在賽車沖出跑道后放棄比賽。
比賽過程中出現下面的情況,算作模型車沖出跑道一次。
l 裁判點名后,30秒之內,參賽隊沒有能夠進入比賽場地并做好比賽準備;
l 比賽開始后,賽車在30秒之內沒有離開出發區;
l 賽車在離開出發區之后60秒之內沒有跑完一圈;
比賽過程中如果出現有如下一種情況,判為比賽失敗:
l 賽車沖出跑道的次數超過兩次;
l 比賽開始后未經裁判允許,選手接觸賽車;
l 決賽后,賽車沒有通過現場技術檢驗。
如果比賽失敗,則不計成績。
比賽禁止事項:
l 不允許在賽車之外安裝輔助照明設備及其它輔助傳感器等;
l 選手進入比賽場地后,除了可以更換電池之外,不允許進行任何硬件電路和軟件的更換。但是可以手工改動電路板上的撥碼開關或者電位器等;
l 比賽場地內,除了裁判與1名隊員之外,不允許任何其他參賽人員進入場地;
l 不允許其它干擾賽車運動的行為;
l 不允許賽車的任何傳感器或者部件損毀跑道;
l 不允許車模設計方案抄襲,各個參賽隊伍所設計的硬軟件需要相互之間有明顯的不同。
4.比賽組織說明:
1) 現場正式比賽前,每個參賽隊伍都有現場環境適應性調試階段。調試跑道與比賽跑道形狀不一定一樣。
2) 比賽開賽之前,所有車模都由比賽組委會收集并存放在同一保管區域,直到比賽結束。
3) 在比賽期間,大賽組委會技術組將根據情況對參賽車模進行技術檢查。如果違反了比賽規則的禁止事項,大賽組委會有權取消參賽隊伍的成績。
五. 其他
1. 比賽過程中有其他作弊行為的,取消比賽成績;
2. 參加預賽并晉級決賽的隊伍人員不允許改變;
3. 參加全國總決賽的隊伍中的隊員最多只允許改變一名隊員。
3. 本規則解釋權歸比賽組織委員會和競賽秘書處所有。
第八屆全國大學生“飛思卡爾”杯智能汽車競賽組織委員會
全國大學生智能汽車競賽秘書處
2012年10月14
附件一:智能競賽車模的規定
1) 禁止改動車底盤結構、輪距、輪徑及輪胎;如有必要可以對于車模中的零部件進行適當刪減。
2) 禁止采用其它型號的驅動電機,禁止改動驅動電機的傳動比;
3) 禁止改造車模運動傳動結構;
4) 禁止改動舵機,但可以更改舵機輸出軸上連接件;
5) 禁止改動驅動電機以及電池,車模前進動力必須來源于車模本身直流電機及電池;
6) 禁止增加車模地面支撐裝置。在車模靜止、動態運行過程中,只允許車模原有四個車輪對車模起到支撐作用。對于光電平衡組,車模直立行走,在比賽過程中,只允許原有車模兩個后輪對車模起到支撐作用。
7) 為了安裝電路、傳感器等,允許在底盤上打孔或安裝輔助支架等。
附件二:電路器件及電路制作限制
1) 本著進一步限制克隆車的原則,同一組別不同隊伍之間需要采用飛思卡爾不同系列的微控制器,以從軟件設計上避免克隆車問題。
2) 飛思卡爾不同系列的微控制器包括,32位Kinetis系列;32位ColdFire系列;32位MPC56xx系列;DSC系列;16位微控制器,8位微控制系列系列。
3) 核心控制模塊可以采用組委會提供的K10、9S12G128、MPC5604B,也可以選用2)中所述飛思卡爾公司微控制器自制控制電路板。每臺車模除了8位微控制系列可以允許同時使用兩片之外,其它系列的微控制器則只能使用一片。
4) 除了上述規定的微控制器之外不得使用輔助處理器以及其它可編程器件;
5) 伺服電機數量不超過 3個。除了原車模配置的轉向舵機之外,新增加的舵機的型號必須是由廣東博思公司提供的舵機FUTABA3010或者由北京科宇通博科技有限公司提供的S-D5舵機。
6) 傳感器數量不超過16個:光電傳感器接受單元計為1個傳感器,發射單元不計算;CCD傳感器計為1個傳感器;磁場傳感器在同一位置可以有不同方向傳感器,計為一個傳感器。對于車模的車速和姿態進行檢測的傳感器也計算在內。
7) 在平衡組中,如果選用加速度器,則必須選擇飛思卡爾公司的MMA7260,MMA7660,MMA7360,MMA8450,MMA8451等系列的加速度器。如果選用陀螺儀,則必須選擇村田公司的ENC-03系列的陀螺儀。
注:關于加速度傳感器和陀螺儀選型的規定有可能會由于市場貨源問題放寬,請關注競賽網站上的更新信息。
8) 光電平衡組如果使用線陣CCD則必須使用Texas Advanced Optoelectronic Solution公司的TSL1401系列的線性CCD。
9) 直流電源使用大賽指定的電池;
10) 禁止使用DC-DC升壓電路直接為驅動電機以及舵機提供動力;
11) 全部電容容量和不得超過2000微法;電容最高充電電壓不得超過25伏;
12) 本競賽智能車中,除單片機最小系統的核心子板、加速度計和陀螺儀集成電路板、攝像頭、舵機自身內置電路外,所有電路均要求為自行設計制作,禁止購買現成的功能模塊。如果自制電路采用PCB印制電路板,必須在銅層(TopLayer或BottomLayer)醒目位置放置本參賽隊伍所在學校名稱、隊伍名稱、參賽年份,對于非常小的電路板可以使用名稱縮寫,名稱在車模技術檢查時直接可見。
可以選擇參數:
1) 開發軟件可以選擇CodeWarrior調試軟件,也可以另行選擇;
2) 開發調試硬件可以選擇秘書處統一推薦的 BDM工具,也可以另行選擇;
3) 電路所使用元器件(傳感器、各種信號調理芯片、接口芯片、功率器件等)種類與數量都可以自行設計選擇。
附件三:賽道基本參數(不包括拐彎點數目、位置以及整體布局)
1) 賽道路面用專用白色KT基板制作,在初賽階段時,跑道所占面積在5m×7m左右,決賽階段時跑道面積可以增大。
賽道寬度不小于45cm。賽道與賽道的中心線之間的距離不小于60cm。如下圖所示:
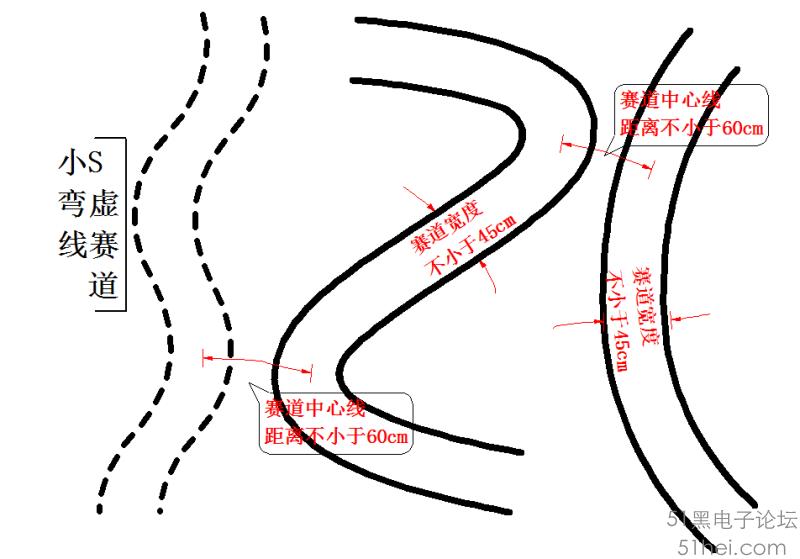
圖5賽道寬度及間距
2) 鋪設賽道地板顏色不作要求,它和賽道之間可以但不一定有顏色差別。
3) 跑道表面為白色,賽道兩邊有黑色線,黑線寬25mm±5,沿著賽道邊緣粘貼。
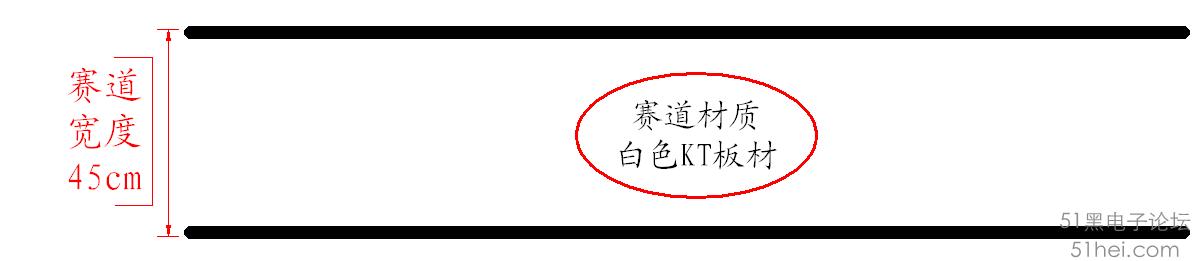
圖6賽道顏色及邊線
4) 在賽道中的小S彎道上會出現虛線賽道。每段虛線賽道的長度不超過2米。小S彎道由若干段圓弧組成。圓弧的半徑范圍在50至60厘米,圓弧的對應的角度小于60°。虛線由長度為10厘米,寬度2.5厘米的黑線段相間10厘米組成。虛線賽道的規格參見下圖:
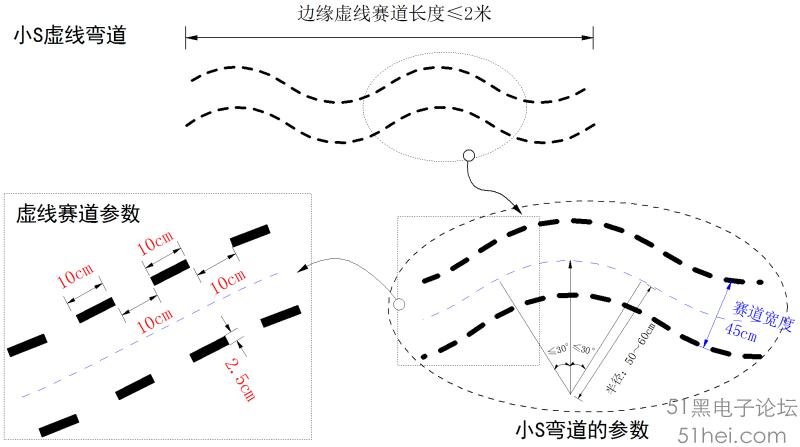
圖7 小S虛線賽道
虛線段區只會出現在攝像頭組和光電平衡組的賽道上,電磁組沒有虛線 段區。賽道上最多出現兩段虛線區域。
5) 直徑0.1-0.8mm漆包線,其中通有20kHz,100 mA的交變電流。頻率范圍20k±1k,電流范圍(100±20mA)。
6) 跑道中心線最小曲率半徑不小于50cm。
7) 在三個組別的賽道直線區會有長度不超過1米的路障區域。賽道上最多出現兩段路障區域。
圖8道中的路障區示意圖
路障是由單層KT板裁切而成。路障的長度與賽道的寬度一樣,路障的寬度為10厘米,高度小于0.5厘米,間隔為10厘米。具體參數見下圖所示:
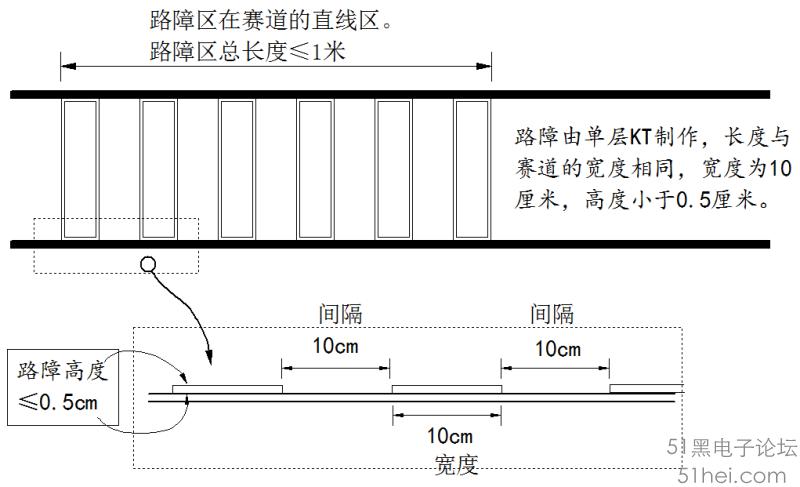
圖9中的路障區
8) 跑道可以交叉,交叉角為90°。交叉路口黑色邊緣線如下圖所示:
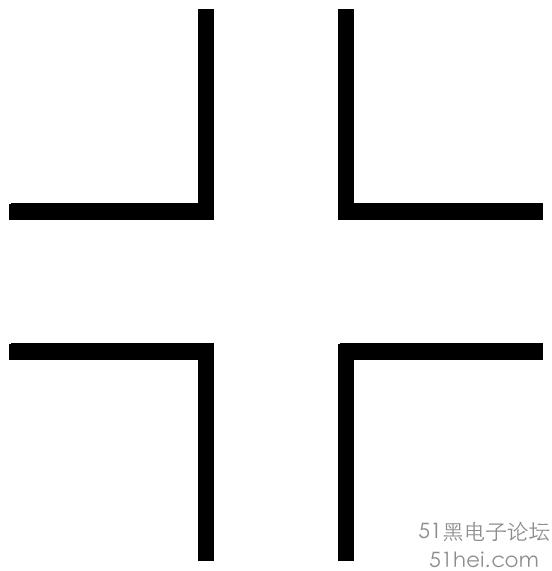
圖10十字路口
9) 賽道直線部分可以有坡度在15°之內的坡面道路,包括上坡與下坡道路。電磁組的賽道沒有坡道。
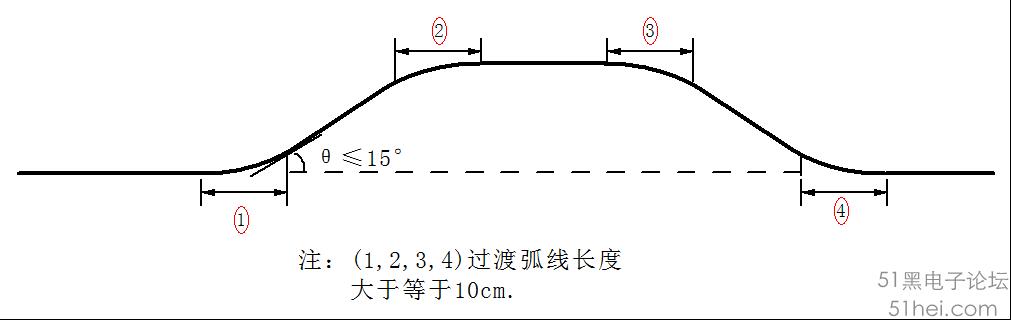
圖11中的坡道
10) 賽道有一個長為1m的出發區,如下圖所示,計時起始點兩邊分別有一個長度10cm黑色計時起始線,賽車前端通過起始線作為比賽計時開始或者結束時刻。黑線起始線的寬度與賽道邊線寬度一致。在黑色計時起始線中間安裝有永久磁鐵,每一邊各三只。磁鐵參數:直徑7.5 - 15mm,高度1-3mm,表面磁場強度3000-5000高斯。
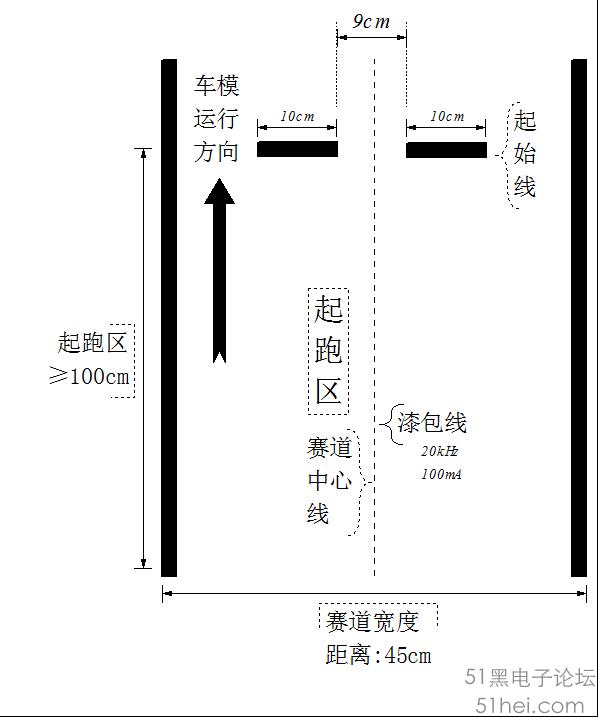
圖12的起跑區
起跑線附近的永磁鐵的分布是在跑道中心線兩邊對稱分布。相應的位置如下圖所示:
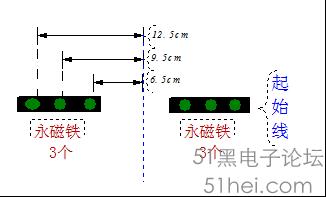
圖13跑線下的永磁體安放位置
終于到我們了,加油!