��(bi��o)�}: ��c/os<->STM32���� [��ӡ���(y��)]
����: 51��fan �r(sh��)�g: 2016-1-31 01:01
��(bi��o)�}: ��c/os<->STM32����
P80:��c/os��r(sh��)� Ӳ�����r(sh��)���Дࣨʹ����STM32�е�Systick�Дࣩÿ�a(ch��n)��һ�Σ���c/os��r(sh��)犾͕�(hu��)�M(j��n)��һ��ϵ�y(t��ng)�Д����(w��)����OSTickISR()��,ϵ�y(t��ng)�Д����(w��)����ͨ�^(gu��)�{(di��o)��OSTimeTick()��(l��i)���ϵ�y(t��ng)ÿ��(g��)�r(sh��)犹�(ji��)����Ҫ��ɵĹ�����������vÿ��(g��)�΄�(w��)���ƉK�����ӕr(sh��)����(sh��)�p1�ȣ���
P87:�^�Ӻ���(sh��)
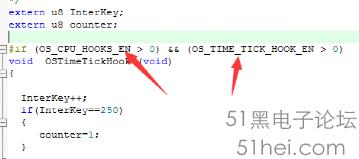
�^�Ӻ���(sh��)��ʹ�ã���O(sh��)STimerTickHook��������
��Ҫ��os_cfg.h�а��@�ɂ�(g��)��#define��>0��
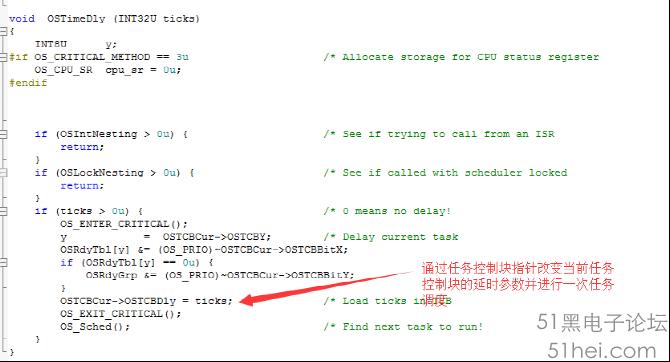
P88:OSTimeDly��OSTimeDly�����OSTCBCur->OSTCBDly���΄�(w��)�ӕr(sh��)�Ĵ������Č�(xi��)�벢�M(j��n)��һ���΄�(w��)�ГQ��
����c/os��ĕr(sh��)�OSTimeTick()����ô�cSTM32��SysTick�P(gu��n)(li��n)����(l��i)�ģ�
��(zh��n)Ş�_(k��i)�l(f��)�����׳�������main()����delay_init()��delay.c�£�����(sh��)����ԭ���a���£�
void delay_init()
{
#ifdef OS_CRITICAL_METHOD //���OS_CRITICAL_METHOD���x��,�f(shu��)��ʹ��ucosII��.
u32 reload;
#endif
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8); //�x���ⲿ�r(sh��)� HCLK/8
fac_us=SystemCoreClock/8000000; //��ϵ�y(t��ng)�r(sh��)犵�1/8
#ifdef OS_CRITICAL_METHOD //���OS_CRITICAL_METHOD���x��,�f(shu��)��ʹ��ucosII��.
reload=SystemCoreClock/8000000; //ÿ��犵�Ӌ(j��)��(sh��)�Δ�(sh��) ��λ��K
reload*=1000000/OS_TICKS_PER_SEC;//����(j��)OS_TICKS_PER_SEC�O(sh��)������r(sh��)�g
//reload��24λ�Ĵ���,���ֵ:16777216,��72M��,�s��1.86s����
fac_ms=1000/OS_TICKS_PER_SEC;//����ucos�����ӕr(sh��)�����ن�λ
SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk; //�_(k��i)��SYSTICK��
SysTick->LOAD=reload; //ÿ1/OS_TICKS_PER_SEC���Д�һ��
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //�_(k��i)��SYSTICK
#else
fac_ms=(u16)fac_us*1000;//��ucos��,����ÿ��(g��)ms��Ҫ��systick�r(sh��)犔�(sh��)
#endif
}
��Ҋ(ji��n)delay_init()�_(k��i)����STM32��SYSTICK�Д࣬�����^�m(x��)��SYSTICK���Д����(w��)����ͬ��Ҳ��delay.c�������a���£�
void SysTick_Handler(void)
{
OSIntEnter(); //�M(j��n)���Д࣬�����H�H�nj��Д��Д��Ӕ�(sh��)�Ƿ��_(d��)��255��tOSIntNesting++
OSTimeTick(); //�{(di��o)��ucos�ĕr(sh��)犷���(w��)����
OSIntExit(); //�|�l(f��)�΄�(w��)�ГQܛ�Д�
}
�l(f��)�F(xi��n)OSTimeTick(); �� SYSTICK���Д����(w��)�����{(di��o)�ã��F(xi��n)�ڦ�c/os��ĕr(sh��)�OSTimeTick()���cSTM32��SysTick�P(gu��n)(li��n)������(l��i)��
OSIntExit (void)�����ó��ˈ�(zh��)����OSIntNesting--֮�� ߀�M(j��n)����һ���Д༉(j��)�΄�(w��)�{(di��o)��OSIntCtxSw() ��
��OSIntCtxSw()�ГQ�΄�(w��)��ԭ����
Step1��SIntCtxSw()�|�l(f��)��һ��ܛ���Д࣬���a����
;/**************************************************************************************
;* ����(sh��)���Q(ch��ng): OSIntCtxSw
;* ��������: �Д༉(j��)�΄�(w��)�ГQ(�䌍(sh��)���M(j��n)����һ��ܛ���Д�)
;* �� ��(sh��): None
;* �� �� ֵ: None
;***************************************************************************************/
OSIntCtxSw
PUSH {R4, R5}
LDR R4, =NVIC_INT_CTRL ;�|�l(f��)PendSV���� (causes context switch)
;NVIC_INT_CTRL����ܛ���Д���ƼĴ���
LDR R5, =NVIC_PENDSVSET ;NVIC_PENDSVSET���|�l(f��)ܛ���Д��ֵ.
STR R5, [R4] ;��R5�е���?j��n)?sh��)��(j��)��(xi��)����R4���ַ�Ĵ惦(ch��)���оͰl(f��)����PendSV�Д�
POP {R4, R5}
BX LR
NOP
Step2:��(zh��)������step���(hu��)�M(j��n)��ܛ���Д����(w��)����(sh��)�����a(��os_cpu_aasm��)����
;/**************************************************************************************
;* ����(sh��)���Q(ch��ng): OSPendSV
;*
;* ��������: ԓ����(sh��)��(sh��)�H�������cpu���Ĵ����ĉ��������΄�(w��)�ї���cpu���M(j��n)��;
;* �� ��(sh��): None
;*
;* �� �� ֵ: None
;***************************************************************************************/
PendSV_Handler ;ܛ���Д����(w��)����(sh��)
CPSID I ; Prevent interruption during context switch
MRS R0, PSP ; PSP is process stack pointer �������PSP�ї�,�t���Ժ��Ա���Ĵ���,����CM3��(qu��n)���е��p�ї�-�ײ�ע
CBZ R0, PendSV_Handler_Nosave ; Skip register save the first time
SUBS R0, R0, #0x20 ; Save remaining regs R4-11 on process stack
STM R0, {R4-R11}
LDR R1, =OSTCBCur ; OSTCBCur->OSTCBStkPtr = SP; =OSTCBCur����ȡ��OSTCBCur
����ַ�����΄�(w��)���ƉK�Ķї���
LDR R1, [R1]
STR R0, [R1] ; R0 is SP of process being switched out
����(d��ng)�R��^(q��)���φ�Ƭ�C(j��)�Д�
����OSIntExit��(du��)�΄�(w��)���{(di��o)�������R��^(q��)���M(j��n)�еġ���ô�M(j��n)�����R��^(q��)��ǡ�Æ�Ƭ�C(j��)�l(f��)�����Еr(sh��)��(hu��)����(hu��)��Ɇ�Ƭ�C(j��)�Д��ʧЧ�أ�
---�˕r(sh��)��(d��ng)Ȼ��������R��^(q��)�ij���Ȼ���˳��R��^(q��)�r(sh��)��Ƭ�C(j��)��(hu��)�Ԅ�(d��ng)��(zh��)���Д����(w��)����(sh��)����?y��n)��mȻ���R��^(q��)ϵ�y(t��ng)�o��Ƭ�C(j��)�P(gu��n)�]�˿��Д࣬�����Д�߀�Ǖ�(hu��)����Ƭ�C(j��)���յģ�ֻ�����R��^(q��)�r(sh��)�Д��](m��i)���|�l(f��)��
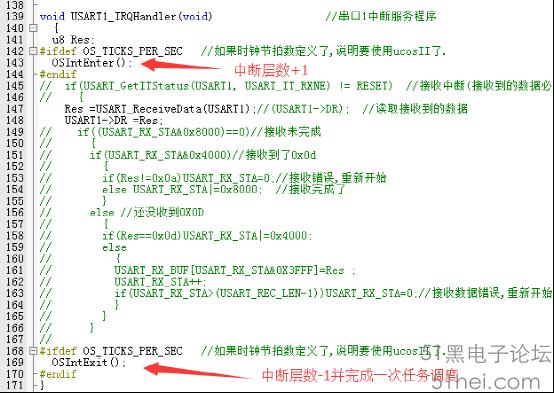
������ucos��ʹ��stm32���Д�ֻҪ���㱼����ʽ���üĴ����������M(j��n)����˳��Д����(w��)����(sh��)��ֻ��Ҫ���Д��Ӕ�(sh��)+1��-1�����³����Դ���1���������ɣ�
/**********************USART1�Ĵ�������***********************/
void uart_init(u32 bound)
{
//GPIO�˿��O(sh��)��
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //ʹ ��USART1��GPIOA�r(sh��)��Լ���(f��)�ù��ܕr(sh��)�
//USART1_TX PA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //��(f��)������ݔ��
GPIO_Init(GPIOA, &GPIO_InitStructure);
//USART1_RX PA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//����ݔ��
GPIO_Init(GPIOA, &GPIO_InitStructure);
//Usart1 NVIC ����
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//��ռ��(y��u)�ȼ�(j��)3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //�Ӄ�(y��u)�ȼ�(j��)3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQͨ��ʹ��
NVIC_Init(&NVIC_InitStructure); //����(j��)ָ���ą���(sh��)��ʼ��VIC�Ĵ���
//USART ��ʼ���O(sh��)��
USART_InitStructure.USART_BaudRate = bound;//һ���O(sh��)�Þ�9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//���L(zh��ng)��8λ��(sh��)��(j��)��ʽ
USART_InitStructure.USART_StopBits = USART_StopBits_1;//һ��(g��)ֹͣλ
USART_InitStructure.USART_Parity = USART_Parity_No;//�o(w��)��żУ�(y��n)λ
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//�o(w��)Ӳ����(sh��)��(j��)������
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //�հl(f��)ģʽ
USART_Init(USART1, &USART_InitStructure); //��ʼ������
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//�_(k��i)����
USART_Cmd(USART1, ENABLE); //ʹ�ܴ���
}
/***************/**********************�����(w��)����(sh��)*******************************************/
���΄�(w��)�Ē����c�֏�(f��)
/***********************************�΄�(w��)�Ē����c�֏�(f��)*******************************************/
����OSTaskSuspend(INT8U prio) ����ǒ�������t����(sh��)�� OS_PRIO_SELF
�֏�(f��)��OSTaskResume(INT8U prio)
��������ͻ֏�(f��)�ɹ��t���أ�OS_NO_ERROR,���ɹ��t����ֵҊ(ji��n)���̲ܽ�P47��
���뼉(j��)�ӕr(sh��)�ͺ��뼉(j��)�ӕr(sh��)�ą^(q��)�e
�뼉(j��)�ӕr(sh��)�ͺ��뼉(j��)�ӕr(sh��)����ʹ����ϵ�y(t��ng)�r(sh��)犣������뼉(j��)�ӕr(sh��)�H�H�������ӕr(sh��)��(ch��ng)�ϣ���DS18B20�������뼉(j��)�ӕr(sh��)���ӕr(sh��)��ͬ�r(sh��)߀�l(f��)�����΄�(w��)�{(di��o)�ȡ��@�ɂ�(g��)�ӕr(sh��)����ʹ����ϵ�y(t��ng)�r(sh��)�����ô�������أ�
����SysTick��һ��(g��)�pӋ(j��)��(sh��)����delay_us���Ì�(sh��)�r(sh��)��ԃ(x��n)���r(sh��)��SysTick->VAL; ͨ�^(gu��)��(du��)�ȳ�ʼֵ�Ͷ��r(sh��)ֵ֮�g�IJ��(l��i)Ӌ(j��)���Ƿ��_(d��)�����r(sh��)�r(sh��)�L(zh��ng)��delay_usֻ�džμ����ӕr(sh��)���ӕr(sh��)���g����(hu��)�M(j��n)���΄�(w��)�{(di��o)�ȡ���delay_ms��ʹ����SysTick�Д࣬���Д��Е�(hu��)��(zh��)��һ���΄�(w��)�{(di��o)�ȡ�
��OSTaskStkInit()
�f(shu��)֮ǰ߀�ǵ����f(shu��)һ���΄�(w��)�ГQ����?y��n)��ʼ���΄?w��)�ї����Ǟ��΄�(w��)�ГQ����(w��)�ġ����a�������\(y��n)�Еr(sh��)��һ��һ������(zh��)�У���ô�����ܵ���һ��(g��)�΄�(w��)��������(sh��)����(zh��)���أ����ȴ�ҿ��Ի���һ���Д��^(gu��)�̣���(d��ng)�Д�l(f��)���r(sh��)��ԭ��(l��i)����(sh��)��(zh��)�еĵط�������Ӌ(j��)��(sh��)��PC��̎������B(t��i)�Ĵ���������ͨ�üĴ���������(d��ng)ǰ���a�ĬF(xi��n)��(ch��ng)�������浽������ȥ�ˣ�Ȼ���_(k��i)ʼȡ�Д��������ܵ��Дຯ��(sh��)�����(zh��)�С���(zh��)�������أ���ص�ԭ��(l��i)����(sh��)��(zh��)�еĵط���ԓ��ô�k�أ�ֻҪ�ї��б����ԭ��(l��i)����(sh��)��(zh��)�е���Ϣ�֏�(f��)���ɣ��ї��б���Ĵ��a�F(xi��n)��(ch��ng)�����x�ocpu�ĸ���(g��)�Ĵ�������һ�оͶ���ȥ�ˣ�����ʲô�¶��](m��i)�l(f��)��һ�ӡ��@��(g��)�^(gu��)�̴�ґ�(y��ng)ԓ�����^��Ϥ���΄�(w��)�ГQ���@��ʲô�P(gu��n)ϵ��ԇ��һ�£������3��(g��)����(sh��)foo1(), foo2(), foo3()���DŽ����Д࣬�F(xi��n)��(ch��ng)���浽������ȥ�ˣ����Д�ؕr(sh��)���c(di��n)���_���{(di��o)�ȳ�������ã�������Ă�(g��)���Ă�(g��)���Dz��Ǿ����˺���(sh��)���΄�(w��)���ГQ�ˡ������@�(y��ng)ԓ���c(di��n)����OSTaskStkInit()�������˰ɣ������΄�(w��)��(chu��ng)������(sh��)�{(di��o)�ã�����Ҫ���_(k��i)ʼ�r(sh��)���ڗ�������ԓ�΄�(w��)�����Д�һ�ӵļ����P(gu��n)���΄�(w��)�ГQ��ԭ�����ώ���(sh��)�е�3.06��(ji��)�н�B����
��ô�Д�����ǂ�(g��)ʲô�����أ���9.1.1�н�B��xPSR��PC��LR��R12��R3-R0���Ԅ�(d��ng)���浽���еģ�R11-R4�����Ҫ���棬ֻ���ֹ����档���OSTaskStkInit()�Ĺ����������΄�(w��)�Լ��ė��б���cpu�����мĴ������@Щֵ��R1-R12���](m��i)ʲô���x���@��������(y��ng)�Ĕ�(sh��)�ִ�̖(h��o)����R1��0x01010101����Ҫ�Ƿ����{(di��o)ԇ��
�����ׂ�(g��)��
xPSR = 0x01000000L��xPSR Tλ����24λ����1����t��һ�Έ�(zh��)���΄�(w��)�r(sh��)Fault��
PC�϶���ָ���΄�(w��)��ڣ�
R14 = 0xFFFFFFFEL�����4λ��E����һ��(g��)�Ƿ�ֵ����ҪĿ���Dz�ʹ��R14�����΄�(w��)�Dz��ܷ��صġ�
R0���ڂ��f�΄�(w��)����(sh��)�ą���(sh��)����˵���p_arg��
OS_STK *OSTaskStkInit (void (*task)(void *p_arg), void *p_arg, OS_STK *ptos, INT16U opt)
{
OS_STK *stk;
(void)opt; /* 'opt' is not used, prevent warning */
stk = ptos; /* Load stack pointer */
/* Registers stacked as if auto-saved on exception */
*(stk) = (INT32U)0x01000000L; /* xPSR */
*(--stk) = (INT32U)task; /* Entry Point */
/* R14 (LR) (init value will cause fault if ever used)*/
*(--stk) = (INT32U)0xFFFFFFFEL;
*(--stk) = (INT32U)0x12121212L; /* R12 */
*(--stk) = (INT32U)0x03030303L; /* R3 */
*(--stk) = (INT32U)0x02020202L; /* R2 */
*(--stk) = (INT32U)0x01010101L; /* R1 */
*(--stk) = (INT32U)p_arg; /* R0 : argument */
/* Remaining registers saved on process stack */
*(--stk) = (INT32U)0x11111111L; /* R11 */
*(--stk) = (INT32U)0x10101010L; /* R10 */
*(--stk) = (INT32U)0x09090909L; /* R9 */
*(--stk) = (INT32U)0x08080808L; /* R8 */
*(--stk) = (INT32U)0x07070707L; /* R7 */
*(--stk) = (INT32U)0x06060606L; /* R6 */
*(--stk) = (INT32U)0x05050505L; /* R5 */
*(--stk) = (INT32U)0x04040404L; /* R4 */
return (stk);
}
��OS_CPU_SysTickHandler(), OS_CPU_SysTickInit()עጵ���
#define OS_CPU_CM3_NVIC_ST_CTRL (*((volatile INT32U *)0xE000E010))
#define OS_CPU_CM3_NVIC_ST_RELOAD (*((volatile INT32U *)0xE000E014))
#define OS_CPU_CM3_NVIC_ST_CURRENT (*((volatile INT32U *)0xE000E018))
#define OS_CPU_CM3_NVIC_ST_CAL (*((volatile INT32U *)0xE000E01C))
#define OS_CPU_CM3_NVIC_ST_CTRL_COUNT 0x00010000
#define OS_CPU_CM3_NVIC_ST_CTRL_CLK_SRC 0x00000004
#define OS_CPU_CM3_NVIC_ST_CTRL_INTEN 0x00000002
#define OS_CPU_CM3_NVIC_ST_CTRL_ENABLE 0x00000001
�������@Щ�궨�xҲעጵ�����?y��n)�����������OS_CPU_SysTickHandler(), OS_CPU_SysTickInit()��
os_cpu_a.asm
�@��(g��)�ļ�����������ÅR����(xi��)�Ĵ��a��
EXTERN OSRunning ; External references
EXTERN OSPrioCur
EXTERN OSPrioHighRdy
EXTERN OSTCBCur
EXTERN OSTCBHighRdy
EXTERN OSIntNesting
EXTERN OSIntExit
EXTERN OSTaskSwHook
�����@Щ׃�����������ļ����x�ģ����ļ�ֻ�����ã��Ўׂ�(g��)����δ���ã����^(gu��)�](m��i)���P(gu��n)ϵ����
EXPORT OS_CPU_SR_Save ; Functions declared in this file
EXPORT OS_CPU_SR_Restore
EXPORT OSStartHighRdy
EXPORT OSCtxSw
EXPORT OSIntCtxSw
EXPORT OS_CPU_PendSVHandler
�����@Щ����(sh��)���ڱ��ļ��ж��x�ġ�
NVIC_INT_CTRL EQU 0xE000ED04 ;�Д���Ƽ���B(t��i)�Ĵ���ICSR�ĵ�ַ
NVIC_SYSPRI14 EQU 0xE000ED22 pendSV��(y��u)�ȼ�(j��)�Ĵ����ĵ�ַ
NVIC_PENDSV_PRI EQU 0xFF pendSV�Д�ă�(y��u)�ȼ�(j��)��255����ͣ�
NVIC_PENDSVSET EQU 0x10000000 ;λ28��1
���x�ׂ�(g��)�������(l��i)��C�Z(y��)���е�#define�A(y��)̎��ָ�
OS_CPU_SR_Save
MRS R0, PRIMASK ;�xȡPRIMASK��R0�У�R0�鷵��ֵ
CPSID I PRIMASK=1���P(gu��n)�ДࣨNMI��Ӳfault����푑�(y��ng)��
BX LR ;����
OS_CPU_SR_Restore
MSR PRIMASK, R0 ;�xȡR0��PRIMASK�У�R0�酢��(sh��)
BX LR ;����
OSStartHighRdy()��OSStart()�{(di��o)�ã��Á�(l��i)����(d��ng)��߃�(y��u)�ȼ�(j��)�΄�(w��)����(d��ng)Ȼ�΄�(w��)�����OSStart()ǰ�ѱ���(chu��ng)����
OSStartHighRdy
;�O(sh��)��PendSV�Д�ă�(y��u)�ȼ�(j��) #1
LDR R0, =NVIC_SYSPRI14 ;R0 = NVIC_SYSPRI14
LDR R1, =NVIC_PENDSV_PRI ;R1 = NVIC_PENDSV_PRI
STRB R1, [R0] ;*(uint8_t *)NVIC_SYSPRI14 = NVIC_PENDSV_PRI
;�O(sh��)��PSP��0 #2
MOVS R0, #0 ;R0 = 0
MSR PSP, R0 PSP = R0
;�O(sh��)��OSRunning��T(m��n)RUE
LDR R0, =OSRunning ;R0 = OSRunning
MOVS R1, #1 ;R1 = 1
STRB R1, [R0] ;OSRunning = 1
;�|�l(f��)PendSV�� #3
LDR R0, =NVIC_INT_CTRL ;R0 = NVIC_INT_CTRL
LDR R1, =NVIC_PENDSVSET ;R1 = NVIC_PENDSVSET
STR R1, [R0] ;*(uint32_t *)NVIC_INT_CTRL = NVIC_PENDSVSET
CPSIE I ;�_(k��i)��
OSStartHang ;��ѭ�h(hu��n)����(y��ng)ԓ����(hu��)���@��
B OSStartHang
#1.PendSV�Д�ă�(y��u)�ȼ�(j��)��(y��ng)ԓ����̓�(y��u)�ȼ�(j��)��ԭ���ڵ�7.6��(ji��)�����f(shu��)����
#2.PSP�O(sh��)�Þ�0���Ǹ��V���w���΄�(w��)�ГQ����OS_CPU_PendSVHandler()�����@�ǵ�һ���΄�(w��)�ГQ�����^(gu��)�ГQ��PSP�Ͳ���(hu��)��0�ˣ������(hu��)������
#3.���Д���Ƽ���B(t��i)�Ĵ���ICSR(0xE000ED04)��28λ��(xi��)1���ɮa(ch��n)��PendSV�Дࡣ�@��(g��)8.4.5 �������������üĴ������f(shu��)����
��(d��ng)һ��(g��)�΄�(w��)�ŗ�cpu��ʹ�Ù�(qu��n)���͕�(hu��)�{(di��o)��OS_TASK_SW()�꣬��OS_TASK_SW()����OSCtxSw()��OSCtxSw()��(y��ng)ԓ���΄�(w��)�ГQ��������CM3�У������΄�(w��)�ГQ�����ŵ�PendSV���Д�̎������(sh��)��ȥ���ˣ����OSCtxSw()ֻ�躆(ji��n)�ε��|�l(f��)PendSV�Д༴�ɡ�OS_TASK_SW()����OS_Sched()�{(di��o)�á�
void OS_Sched (void)
{
#if OS_CRITICAL_METHOD == 3
OS_CPU_SR cpu_sr = 0;
#endif
OS_ENTER_CRITICAL();
if (OSIntNesting == 0) {
if (OSLockNesting == 0) {
OS_SchedNew();
if (OSPrioHighRdy != OSPrioCur) {
OSTCBHighRdy = OSTCBPrioTbl[OSPrioHighRdy];
#if OS_TASK_PROFILE_EN > 0
OSTCBHighRdy->OSTCBCtxSwCtr++;
#endif
OSCtxSwCtr++;
OS_TASK_SW(); /* �|�l(f��)PendSV�� */
}
}
}
/* һ���_(k��i)�Д࣬PendSV�Дຯ��(sh��)��(hu��)��(zh��)�У���(d��ng)ȻҪ�ȸ��߃�(y��u)�ȼ�(j��)�Д�̎���꣩ */
OS_EXIT_CRITICAL();
}
OSCtxSw
;�|�l(f��)PendSV��
LDR R0, =NVIC_INT_CTRL ;R0 = NVIC_INT_CTRL
LDR R1, =NVIC_PENDSVSET ;R1 = NVIC_PENDSVSET
STR R1, [R0] ;*(uint32_t *)NVIC_INT_CTRL = NVIC_PENDSVSET
BX LR ;����
��(d��ng)һ��(g��)�Д�̎������(sh��)�˳��r(sh��)��OSIntExit()��(hu��)���{(di��o)�Á�(l��i)�Q���Ƿ��Ѓ�(y��u)�ȼ�(j��)���ߵ��΄�(w��)��Ҫ��(zh��)�С������OSIntExit()��(du��)�{(di��o)��OSIntCtxSw()���΄�(w��)�ГQ��
OSIntCtxSw
;�|�l(f��)PendSV��
LDR R0, =NVIC_INT_CTRL
LDR R1, =NVIC_PENDSVSET
STR R1, [R0]
BX LR
�����@����Щͬ�W(xu��)���������ôOSCtxSw()��OSIntCtxSw()��ȫһ�ӣ���(sh��)�ϣ��@�ɂ�(g��)����(sh��)�����x�Dz�һ�ӵģ�OSCtxSw()�������΄�(w��)֮�g���ГQ�����΄�(w��)A��?y��n)�ȴ�ij��(g��)�YԴ�������ӕr(sh��)�ГQ���΄�(w��)B����OSIntCtxSw()�t���Д��˳��r(sh��)�����Д��B(t��i)�ГQ����һ��(g��)�΄�(w��)�����Д��ГQ���΄�(w��)�r(sh��)��CPU�Ĵ����뗣�Ĺ����ѽ�(j��ng)�����ˣ����ԟo(w��)�����ڶ����ˣ��������ώ���(sh��)��3.10��(ji��)�����@��ֻ���^(gu��)����CM3������C(j��)�ƌ�(d��o)�������@�ɂ�(g��)����(sh��)��ֻҪ���|�l(f��)PendSV�Д༴�ɣ����w�ГQ��PendSV�Д���(l��i)̎����
ǰ���ѽ�(j��ng)�f(shu��)�^(gu��)�������΄�(w��)�ГQ����PendSV�Д�̎������(sh��)�����ģ�����CM3���Д��r(sh��)��(hu��)��һ��ļĴ����Ԅ�(d��ng)���浽�΄�(w��)�ї��������PendSV�Д�̎������(sh��)��ֻ�豣��R4-R11���{(di��o)��(ji��)�ї�ָᘼ��ɡ�
PendSV�Д�̎������(sh��)�δ��a���£�
OS_CPU_PendSVHandler()
{
if (PSP != NULL) {
Save R4-R11 onto task stack;
OSTCBCur->OSTCBStkPtr = SP;
}
OSTaskSwHook();
OSPrioCur = OSPrioHighRdy;
OSTCBCur = OSTCBHighRdy;
PSP = OSTCBHighRdy->OSTCBStkPtr;
Restore R4-R11 from new task stack;
Return from exception;
}
OS_CPU_PendSVHandler ;xPSR, PC, LR, R12, R0-R3���Ԅ�(d��ng)����
CPSID I ;�΄�(w��)�ГQ���g��Ҫ�P(gu��n)�Д�
MRS R0, PSP ;R0 = PSP
;���PSP == 0������OS_CPU_PendSVHandler_nosave��(zh��)�� #1
CBZ R0, OS_CPU_PendSVHandler_nosave
;����R4-R11���΄�(w��)�ї�
SUBS R0, R0, #0x20 ;R0 -= 0x20
STM R0, {R4-R11} ;����R4-R11���΄�(w��)�ї�
;OSTCBCur->OSTCBStkPtr = SP;
LDR R1, =OSTCBCur ;R1 = &OSTCBCur
LDR R1, [R1] ;R1 = *R1 (R1 = OSTCBCur)
STR R0, [R1] ;*R1 = R0 (*OSTCBCur = SP) #2
OS_CPU_PendSVHandler_nosave
;�{(di��o)��OSTaskSwHook()
PUSH {R14} ;����R14����?y��n)����Ҫ�{(di��o)�ú���(sh��)
LDR R0, =OSTaskSwHook ;R0 = &OSTaskSwHook
BLX R0 ;�{(di��o)��OSTaskSwHook()
POP {R14} ;�֏�(f��)R14
;OSPrioCur = OSPrioHighRdy;
LDR R0, =OSPrioCur ;R0 = &OSPrioCur
LDR R1, =OSPrioHighRdy ;R1 = &OSPrioHighRdy
LDRB R2, [R1] ;R2 = *R1 (R2 = OSPrioHighRdy)
STRB R2, [R0] ;*R0 = R2 (OSPrioCur = OSPrioHighRdy)
;OSTCBCur = OSTCBHighRdy;
LDR R0, =OSTCBCur ;R0 = &OSTCBCur
LDR R1, =OSTCBHighRdy ;R1 = &OSTCBHighRdy
LDR R2, [R1] ;R2 = *R1 (R2 = OSTCBHighRdy)
STR R2, [R0] ;*R0 = R2 (OSTCBCur = OSTCBHighRdy)
LDR R0, [R2] ;R0 = *R2 (R0 = OSTCBHighRdy), �˕r(sh��)R0�����΄�(w��)��SP
;SP = OSTCBHighRdy->OSTCBStkPtr #3
LDM R0, {R4-R11} ;���΄�(w��)�ї�SP�֏�(f��)R4-R11
ADDS R0, R0, #0x20 ;R0 += 0x20
MSR PSP, R0 ;PSP = R0�������΄�(w��)��SP���dPSP
ORR LR, LR, #0x04 ;�_��LRλ2��1�����غ�ʹ���M(j��n)�̶ї� #4
CPSIE I ;�_(k��i)��
BX LR ;���
END
#1 ���PSP == 0���f(shu��)��OSStartHighRdy()����(d��ng)���һ�����΄�(w��)�ГQ�����΄�(w��)����(chu��ng)���r(sh��)R4-R11�ѽ�(j��ng)�����ڶї����ˣ����Բ���Ҫ�ٱ���һ���ˡ�
#2 OSTCBStkPtr���΄�(w��)���ƉK�Y(ji��)��(g��u)�w�ĵ�һ��(g��)׃��������*OSTCBCur = SP(���ǺܿƌW(xu��))����OSTCBCur->OSTCBStkPtr = SP;
#3 ��#2�(l��i)�ơ�
#4 ��?y��n)����Д�̎�����?sh��)��ʹ�õ���MSP�������ڷ����΄�(w��)����ʹ��PSP������L(f��ng)Rλ2��횞�1��
os_dbg.c
����ϵ�y(t��ng)�{(di��o)ԇ�����Բ��ܡ�
���P(gu��n)���΄�(w��)���ГQ�r(sh��)��֪�R(sh��)�a(b��)��
���Ŀ�֪��STM32�΄�(w��)�{(di��o)������ܛ���Д����(w��)����(sh��)�Ј�(zh��)�У�����Ҫ��CPU�ă�(n��i)�ݱ��浽�΄�(w��)�ї��У��R�����a���£�
OS_CPU_PendSVHandler ;xPSR, PC, LR, R12, R0-R3���Ԅ�(d��ng)����
CPSID I ;�΄�(w��)�ГQ���g��Ҫ�P(gu��n)�Д�
MRS R0, PSP ;R0 = PSP
;���PSP == 0������OS_CPU_PendSVHandler_nosave��(zh��)�� #1
CBZ R0, OS_CPU_PendSVHandler_nosave
;����R4-R11���΄�(w��)�ї�
SUBS R0, R0, #0x20 ;R0 -= 0x20
STM R0, {R4-R11} ;����R4-R11���΄�(w��)�ї�
;OSTCBCur->OSTCBStkPtr = SP;
LDR R1, =OSTCBCur ;R1 = &OSTCBCur
LDR R1, [R1] ;R1 = *R1 (R1 = OSTCBCur)
STR R0, [R1] ;*R1 = R0 (*OSTCBCur = SP) #2
��ôCPU�ă�(n��i)���DZ����浽�ǂ�(g��)�ї����أ�
������(d��ng)Ȼ�DZ����ڌ�Ҫ�ГQ��CPU���΄�(w��)�Ķї��С�
��ôCPU����ô�������أ�
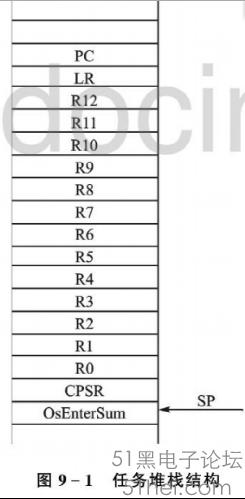
������?y��n)�CPU��R13�б����ˮ�(d��ng)ǰ�����\(y��n)�΄�(w��)�Ķї�ָᘡ����Ԯ�(d��ng)�M(j��n)���Д��r(sh��)CPU�͕�(hu��)����R13ָ��ĵ�ַ��CPU�Ġ�B(t��i)���浽�ї��С��@��������f�΄�(w��)���г���
���҈D9-1��һ��(g��)�΄�(w��)�ї��ĽY(ji��)��(g��u)���҈D��ʾ����(d��ng)һ��(g��)�΄�(w��)�ŗ�CPU��ʹ�Ù�(qu��n)�r(sh��)�͌�CPU�ă�(n��i)�ݱ�����ԓ�΄�(w��)��(du��)��(y��ng)���΄�(w��)�ї��С�
| �gӭ���R (http://www.raoushi.com/bbs/) |
Powered by Discuz! X3.1 |
 Step1���l(f��)��Ӳ���r(sh��)��Д��r(sh��)��(hu��)�{(di��o)���҈D���^�Ӻ���(sh��)����os_cpu.c�ļ��У��������{(di��o)�õ�ԓ����(sh��)��(sh��)�F(xi��n)�ėl���ǣ�
Step1���l(f��)��Ӳ���r(sh��)��Д��r(sh��)��(hu��)�{(di��o)���҈D���^�Ӻ���(sh��)����os_cpu.c�ļ��У��������{(di��o)�õ�ԓ����(sh��)��(sh��)�F(xi��n)�ėl���ǣ�