


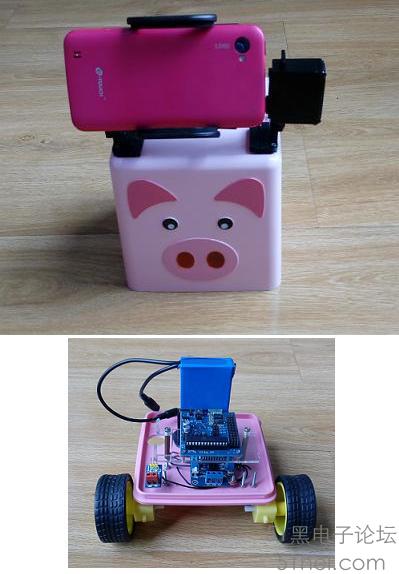
- 方形卡通寵物外觀的紙巾盒1個(這是萌的關鍵,某寶上有賣)
- 萬能手機夾1個(某寶上有賣)
- 網靈機器人3D打印件1套
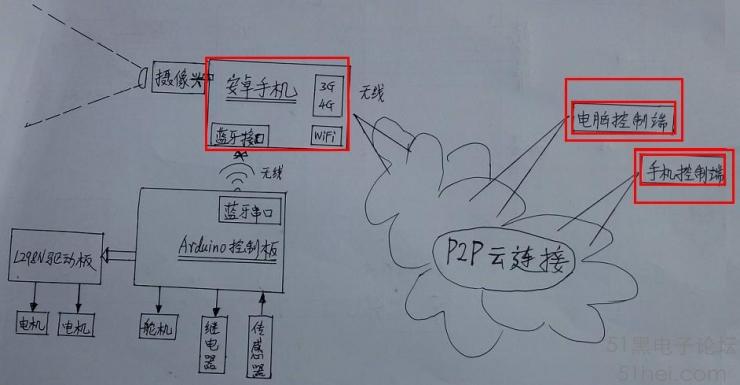
- Arduino控制板+藍牙小板1塊
- L298N電機驅動模塊1塊
- 標準舵機1個
- 電池電壓傳感器模塊1個
- 可充電鋰電池1塊
- 65mm輪子+電機(轉速不要太快,大概為50轉每分鐘)2套
- 一寸萬向輪1個
- 開關1個
- M3x30mm長螺絲4根,M3x25mm螺絲若干,M3x8mm螺絲若干,自攻螺絲若干,銅柱長螺絲2根,M3螺母若干
- 杜邦線若干,導電線若干
 工具
工具相關的代碼和程序點擊下面的鏈接下載(也可點擊這里查看原發布頁面):
- 電烙鐵,電鉆,502膠,電膠布,鉗子,改錐,小刀
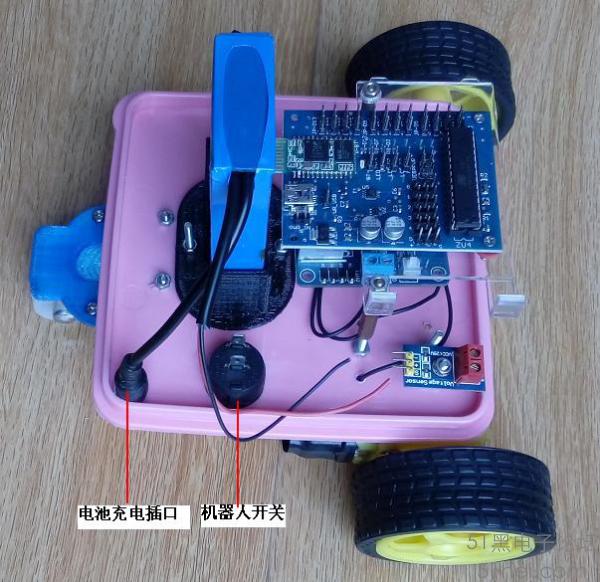
組裝過程











#include<Servo.h>所有的東西都配置好了之后,就該是挑逗TA的時間了:
#include<dht.h>
//模擬IO口和數字IO口的定義
#define PIN_UNDEFINED 255
#define PIN_A_VOLTAGE 5 //電池電壓傳感器
#define PIN_A_MQX 4 //氣體傳感器,MQ2,MQ135
#define PIN_D_SERVO_V 9
#define PIN_D_SERVO_H PIN_UNDEFINED
#define PIN_D_SERVO_L 5 //PIN_UNDEFINED
#define PIN_D_SERVO_R 6 //PIN_UNDEFINED
#define PIN_D_DHT 8//PIN_UNDEFINED //DHT11溫濕度傳感器
#define PIN_D_RELAY PIN_UNDEFINED //一路繼電器
#define PIN_D_RED PIN_UNDEFINED //紅外人體感應傳感器
#define PIN_D_LEDA PIN_UNDEFINED //LED指示燈A
#define PIN_D_LEDB PIN_UNDEFINED //LED指示燈B
//PT2272 Recv,D0->D3用模擬IO口實現,因為Arduino UNO的數字IO口不夠用
#define PIN_D_2272VT 4
#define PIN_A_2272D0 0
#define PIN_A_2272D1 1
#define PIN_A_2272D2 2
#define PIN_A_2272D3 3
//315M、433M RF Send,控制智能開關、智能插座、電動窗簾
#define PIN_D_315SEND 7//PIN_UNDEFINED
#define PIN_D_433SEND PIN_UNDEFINED
//左中右三個方向的壁障傳感器pin定義
#define PIN_D_BIZ_C PIN_UNDEFINED
#define PIN_D_BIZ_L PIN_UNDEFINED
#define PIN_D_BIZ_R PIN_UNDEFINED
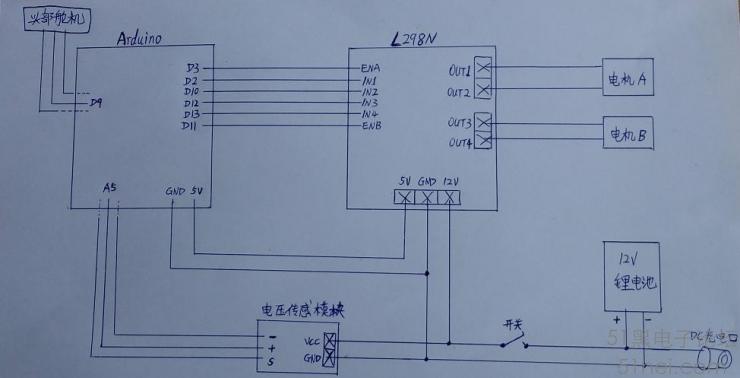
//L298N電機驅動板的控制pin
//舵機用了9號PWM,L298N用10,11號PWM的話,會導致10號PWM失效!!!
//motor A
#define dir1PinA 2
#define dir2PinA 10
#define speedPinA 3
//motor B
#define dir1PinB 12
#define dir2PinB 13
#define speedPinB 11

qjzyx 發表于 2018-1-19 22:37
很好的一個想法~~~~~~改天也試試!
| 歡迎光臨 (http://www.raoushi.com/bbs/) | Powered by Discuz! X3.1 |