��(bi��o)�}: һ�N����DJI A3�w�ص����������Ʒ�ʽ [��ӡ���]
����: iTang �r(sh��)�g: 2020-1-15 15:08
��(bi��o)�}: һ�N����DJI A3�w�ص����������Ʒ�ʽ
N3�w��ONBOARDSDK�����_�l(f��)��(j��ng)�(y��n)����
�_�l(f��)�������Eһ:�x���_�l(f��)��ʽ
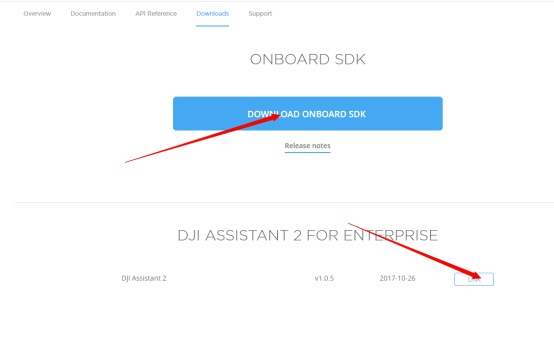
��ȥ���_�l(f��)�߾W(w��ng)վ��https://developer.dji.com/�����Y�ϣ����x�����ONBOARD SDK stm32(�D1)��߀���������_�l(f��)��ʽ������QT,ROS,LINUX�ȡ�  �Dһ
�Dһ���E��:�^���ٷ��Y��
����Ҫ����Documentation�Լ�API Reference������Y�ϣ��D�����������B����ô�M(j��n)�ж����_�l(f��)�Լ���API���÷���
�D��
���E��:���d����(y��ng)ܛ�������a
����(j��)�Լ����x��ȥDownloads���ONBOARD SDK���d���̴��a�Լ�DJI Assistant2(�D��)��
�D��
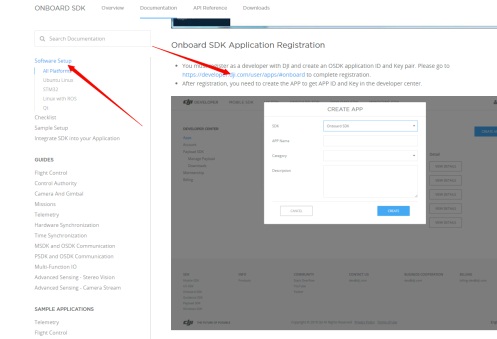
���E��:ע�ԫ@ȡ�_�l(f��)ID��KEY
���d����a��ܛ�����Կ���Documentation�е�Software Setup (�D��)����Ҫ���_�l(f��)�߾W(w��ng)վ����ע��һ��(g��)OSDK application ID and Key pair��
�D��
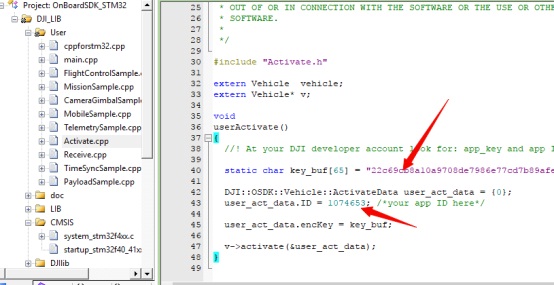
���E��:��ID�cKEY���M(j��n)���a
���_���d�Ĵ��a���c(di��n)��Activate.cpp,���Լ���ע�Ե�ID��Key���M(j��n)ȥ���D�壩����ô��ܛ�������䌍(sh��)�ѽ�(j��ng)��(zh��n)����ˡ�
�D��
���E����Ӳ���B�ӣ�ʹ��API���ƣ�����ӆ���Ϣ�l��
�������ǜ�(zh��n)���STM32F407�İ��ӣ�����]��ԓ��̖��Ո�Լ���ֲ�´��a��������Documentation �е�Hardware Setup���B�ӌ���(y��ng)�Ľӿڡ��ٷ��������Dz��ô������cN3�w���M(j��n)��ͨӍ�����ڶ��c��X��λ�C(j��)ͨӍ�����ڶ��c��XͨӍ���w�س�ʼ���ȳ��F(xi��n)�κΆ��}��������X�˿�������?y��n)���ʹ�õİ��Ӵ������Ľ�������DBUS��Ӳ��ȡ���ˣ��������ҰѴ��ڷ��^�����ˡ����ڶ������cN3ͨӍ�������������c��XͨӍ���w���c�����B�Ӻ��Ժ��_��XDJI Assistant2ܛ������N3�w���c��X���B�ӣ���DJI Assistant2ܛ�����x��C(j��)�����Å���(sh��)�ȣ��@��(g��)�Ͳ��f�ˣ��Լ��ٶȣ��кܶ�̡̳�����Documentation�е�Software Setup�����н̳��f����ô����APIģʽ���D������ʹ��API���ƣ�������Ҫ�x����Ҫӆ醵���Ϣ���l�ʡ�
�D��
���Կ����ҵĴ��a����ӆ醵�һЩ��Ϣ��50HZ�ģ�������ӆ醵���Ϣ�����@��(g��)ܛ���x����50HZ��
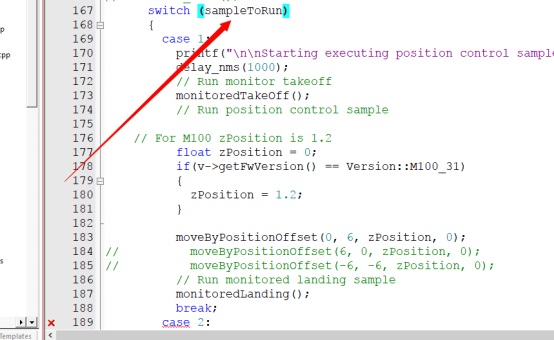
���E��:�B����λ�C(j��)���ܹٷ����̣��^���F(xi��n)��
�ٷ����a�е�main.cpp�У�ͨ�^switch�x����Ҫԇ�����̣��D�ߣ���
�D��
Ȼ��˕r(sh��)���Ԍ����d�Ĵ��a���d�������У����_DJI Assistant2�е�ģ�M�����D�ˣ���
�D��
���Կ����w�C(j��)�����A(y��)�O(sh��)��܉�E�M(j��n)���w�С�����ٷ����̣��D�ţ����w�C(j��)��̓�M���Е��Ԅ����w�����1.2�ף�Ȼ������߅�����w��6�ף�����ǰ�w��6�ף�Ȼ���ڻص�ԭʼλ�ò��ҽ��䡣
�D��
�w�C(j��)�w�C(j��)����yԇ���@�ﶼ�]���}����ô��ϲ�㣬�����_ʼ���҃�(n��i)��λ�ˡ�����λ֮ǰ��һ��Ҫ���Y�Ͽ�һ�£��������̵Ĵ��a����ô���ģ��Լ����c(di��n)�r(sh��)�g��һ���Լ��댍(sh��)�F(xi��n)�Ĺ��ܣ�Ȼ�������ģ�M���п��w��Ч����ģ�M�����w��Ч������(sh��)�H�Dz��ģ�����ÿ�Ό����|������Ҫ�F(xi��n)��ģ�M��ԇԇ����Ҫֱ�����w�C(j��)ԇ��
���E�ˣ������x��
Ҫ���҃�(n��i)��λ���Ǿ�Ҫȥ�I����ģ�K�Լ�����ģ�K������ģ�K��Ԓ���h����Ϥ�����㷨��ͬ�W(xu��)ُ�I�����Ĺ���ģ�K���@������ѽ�(j��ng)�ں��˸߶��Լ����ٶ�Ӌ(j��)���݃x����(sh��)��(j��)���^�ã����������^���㡣������(sh��)��(j��)��Ҫ�Á�ˮƽ��λ��������߶Ȕ�(sh��)��(j��)Ҫ�Á������w�C(j��)�w�еĸ߶ȣ���?y��n)��҃?n��i)���≺Ӌ(j��)�����Dz���(w��n)�����w��(sh��)�F(xi��n)�^�̴��a�ѽ�(j��ng)������עጡ�������Լ��ںϹ�����(sh��)��(j��)��ͬ�W(xu��)����ُ�IJL3285A����(y��u)�����PMW3901�����w�nj�(sh��)�F(xi��n)�^�̾���ʹ�����݃x�Ľ��ٶȔ�(sh��)��(j��)�c����������?c��i)?sh��)��(j��)�M(j��n)���ںϣ�ʹ����ԭ��?f��)u�ι����r(sh��)�����������݃x�Ĕ�(sh��)��(j��)ȥ�ѹ����Ĕ�(sh��)��(j��)���������ٰѸ߶ȵ���Ϣ���M(j��n)ȥ�ںϣ�����K������׃����Ϣ�D(zhu��n)���錍(sh��)�Hcm��λ���ٌ�ԓ��(sh��)��(j��)�c��������(bi��o)ϵ�ļ��ٶ�Ӌ(j��)�M(j��n)���ںϡ��@�ӿ���ʹ���w�C(j��)���w�еĕr(sh��)���·���܇�ӽ�(j��ng)�^������(y��n)�ظɔ_����
��λ˼· �����a��עጣ�- ����˼·���҃�(n��i)���≺���ߵ�Ԓ����?y��n)��҃?n��i)�Ě≺���Ǻܷ�(w��n)�����e�����w�C(j��)�w�е��^���У����~���L(f��ng)���ɔ_���≺Ӌ(j��)����(d��o)��(sh��)��(j��)ͻ׃�����F(xi��n)�w�и߶Ȳ���(w��n)���ĬF(xi��n)��GUIDANCE�Dz����pĿ�ӳ����ķ�����(sh��)�F(xi��n)�ģ��҂��@����õ��Ǽ��⣬Ҳ����ʹ�������ϵ������ĸ߶Ȃ��������xȡ����ĸ߶ȣ����T���еĕr(sh��)��ӛס�˕r(sh��)����߶ȡ�Ȼ��ʹ��PID�M(j��n)���]�h(hu��n)���ƣ�����K�ĽY(ji��)�������w�C(j��)�Ĵ�ֱ�ٶȣ�ʹ��SDK�еĴ�ֱ�ٶȿ���API�������˱����w�C(j��)�w�^һЩ��ƽ̹�ĵط����w�и߶�׃��̫�^�ڄ��ң�����ʹ�ü���߶ȵ�׃���ʣ���(d��ng)׃���^��r(sh��)���������������߶ȵ�ϵ��(sh��)�����Ү�(d��ng)���·�(w��n)���ĕr(sh��)���ٴδ_���߶ȡ�
- ���c(di��n)˼·���Ĺ���ģ�K�У����Եõ��������ٶȔ�(sh��)��(j��)������ͨ�^���r(sh��)��Ӌ(j��)��ǰ����Δ�(sh��)��(j��)�ĕr(sh��)�g�g����Ȼ���ٶ��M(j��n)�зe�֣��õ����x���ٌ��ٶ��Լ����x�M(j��n)���]�h(hu��n)���ƣ�����K�ĽY(ji��)����(d��ng)�w�C(j��)��Ŀ��(bi��o)�ǶȂ���API�С����⣬���w���^�����P(gu��n)�����������ã���(d��ng)�b�ؗU�ӻ��еĕr(sh��)��Ŀ��(bi��o)�ٶ�׃?y��u)?���˕r(sh��)��Ҫ��h(hu��n)λ�íh(hu��n)�����ã������_(d��)���x܇��(w��n)����Ŀ��(bi��o)����(d��ng)�x܇���ٶ���һ��(g��)С������(n��i)�������¼���λ�íh(hu��n)�����Ұ�Ŀǰ��λ�î�(d��ng)��Ŀ��(bi��o)λ�á�
ע������һ��Ҫʹ�ù�����Ҳ����ԇԇ�����������������ώ���vins�_
Դ�㷨+Realsense+manifold2.
�W(w��ng)ַhttps://zhuanlan.zhihu.com/p/59646674
SDK�_�l(f��)ע�����(xi��ng)- STM32�İ��ӳ�ʼ����Ҫ�ȵȴ�һ�Εr(sh��)�g�������ڳ�ʼ���м��ӕr(sh��)�����ߵ��w�سɹ������ٽo������늣���tͨӍ�����ɹ���
- ֮ǰ���F(xi��n)�^�w�صĿ��ƙ�(qu��n)������ȥ���Լ�߀��֪�������Դ����Ҫ�o�w�C(j��)�b��(g��)�����������|�����M(j��n)��SDKģʽ�ĕr(sh��)����ͨ�^��������ʽ�������w�֡�ͬ����Ҫ��һ��(g��)���������ǿ���ͨ�^�����b�ؗU���M(j��n)����˳�SDKģʽ����(d��ng)�Լ����Ė|�����e�ĕr(sh��)���b�ؿ������R�Z�ذ��ӵĿ��ƙ�(qu��n)��
- �ڽo�w�������¹��ܕr(sh��)��Ҫע��һ��Ҫ��ģ�M�������(y��n)�Cһ�£�����ֱ�����w�C(j��)�w���(y��n)�C������ģ�M���У�������M(j��n)��SDKģʽ����Ĭ�J(r��n)GPS��λ�ġ������Լ����˹�����λ�Ĵ��a���������ӓu�U�M(j��n)��SDKģʽ���˕r(sh��)��?y��n)��w�C(j��)�Ķ�λ��Ϣ���Թ���ģ�K����Ϣ��������ģ�M����̓�M��GPS��Ϣ������ģ�M���е��w�C(j��)�������h�ߣ������w���^�̲����x܇��������ք��Ƅ�һ���挍(sh��)���w�C(j��)����ô�˕r(sh��)�����͕����ƄӵĔ�(sh��)��(j��)��ģ�M���е��w�C(j��)�͕������Ƅӵķ�����һֱ�Ƅӣ���(d��ng)����挍(sh��)���w�C(j��)�Ƅӻ�ԭ����λ�ã���ô̓�M���е��w�C(j��)�͕�ͣ�����@���f����λ˼·�����_�ģ��ſ����ó�ȥ����ԇԇ������������˼·Ҳ��һ�ӵģ�Ŀ��(bi��o)�߶ȴ_���ˣ���(d��ng)�������挍(sh��)�w�C(j��)�ĕr(sh��)��ģ�M���е��w�C(j��)�϶���һֱ�½���������ص�֮ǰ��λ�ã����ŕ�ͣ����
- ���h�����������Сһ�c(di��n)���w�C(j��)�{(di��o)ԇ��f330����f450�������{(di��o)ԇ��(w��n)�������ϴ��w�C(j��)�������S���c(di��n)Σ�U(xi��n)���{(di��o)ԇ߀����Ҫ�o��ͬ���XҲ��Ҫ�������IС�ā����档
- �oՓ�������w�C(j��)���_�l(f��)ʲô���ܣ�Ҫ����DJI Assistant2ܛ���ϰ��w��ԭ���ą���(sh��)�{(di��o)ԇ����ѣ���Ȼ�����Ͱ����ˣ�����ԭ����f450�����ö�λ���ܣ����ײ����b�������S�ĕr(sh��)�����S�w����ܛ�d�d�������Ҵ����S����׃���^��r(sh��)���w��ԭ���ą���(sh��)Ҳ�͛]���ˣ����Դ��Ҫ�{(di��o)�Å���(sh��)�����A(ch��)�жȣ������������ˑB(t��i)�ж������w���ԅ���https://www.iqiyi.com/v_19rrari2fo.html����ʹ���w�C(j��)�ڶ���ģʽ�w�Еr(sh��)�ˑB(t��i)ƽ��(w��n)���]�ж��ӣ�ԭ�Ⱦ��Ǜ]��ע���@��(g��)���}���Ԟ��Ƕ�λ���}�����M(f��i)�˺ܶ��r(sh��)�g��
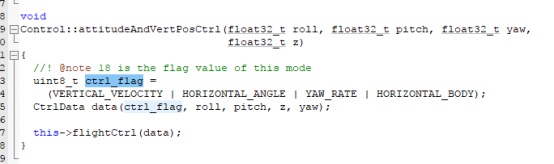
- ʹ��API�ĕr(sh��)��Ҫע��API���Ը���(j��)�Լ�������Ąӣ�ԭ�ȵ�API�Ǯ�(d��ng)��������w�C(j��)���ˑB(t��i)�Ƕȵĕr(sh��)����ô��ֱ����ֻ�ܿ��Ƹ߶ȡ���(d��ng)������ƴ�ֱ������ٶȕr(sh��)����ô�ˑB(t��i)�Ǿ�ֻ�ܿ��ƽ��ٶ�����?y��n)鴹ֱ�����ø߶���Ϣ߀��YAW�ýǶȿ��Ƶ�Ԓ���w��Ч�����Ǻܺã����c(di��n)�t�g�������ٶȿ��ƶ���(g��)API��ì����(���ԏ�ģ�M���п���)�����˺ܶ���a�Ō�(sh��)�F(xi��n)������l(f��)�F(xi��n)����ֱ�Ӹ�API�������˺ܶ࣬�Ұ�PITCH��ROLL�ijɽǶȿ��ƣ���YAW�Լ��߶Ȳ��ý��ٶȺ��ٶȿ������Dʮ�����w�����ͱ��^��֣�����(y��ng)��֮ǰ�`����Ҳ���������Լ������ã��Ҹ��Xԭ����API��(y��ng)ԓ�ǽo�Ԅ��w���O(sh��)Ӌ(j��)�ģ���
 �Dʮ
�Dʮ- �����İ��b��ʽҲ��Ӱ푵��w��Ч����һ��Ĺ���������Ҫ�b���w�C(j��)�����·�������]���b���·���Ԓ��Ҫ�Լ�ȥ���������������������Ԓ����Ҫ���Լ���(x��)��һ���փԣ�ֱ������λ�C(j��)���O(sh��)�þͿ����ˡ������������������Ԍ�ُ�I����Ҿ��������Ƅ�(chu��ng)��
- �����S�w�еĕr(sh��)����������҃�(n��i)���w�еĸ߶�Ҫ��һЩ����?y��n)���е�Ч�����ã�̫���w�C(j��)�����ӣ��{(di��o)ԇ�w�C(j��)����(sh��)�ĕr(sh��)�M����һЩ�������w�C(j��)���w�ĭh(hu��n)����Ҫ̫�^�����]��
- A3�������w��ͬ��֧��SDK�����_�l(f��)�����h����ԇԇA3,�����r(ji��)��������(y��u)�ݿ϶�Ҳ���еġ�
- ���F(xi��n)�Լ������Ć��}(SDK�����Ć��}��Ո��l(f��)��������Ć��})�����l(f��)�]���o������Support��dev@dji.com;��ԃ����һ����ڎ����(n��i)�؏�(f��)���
���a�ļ�������ԭ�ȵ����̶��������]�Єh����
| ���ӳ�ʼ��,�����Д��r(sh��)�g��(zh��)�Ќ���(y��ng)�΄�(w��) |
| ��Ҫ�Á������Լ��M(j��n)��SDKģʽ���Լ����˷��Q������ِ���hʹ�ß����^���@����?y��n)����S��̫�� |
| ԭ�ȴ����̵�ϵ�y(t��ng)�r(sh��)��Լ����r(sh��)����ʼ�� |
| ��Ҫ�Ƕ�λ߀�аl(f��)��λ�ÿ���ָ�� |
| ��ʼ�����ڣ��Á��cN3�w���Լ���X��λ�C(j��)ͨӍ |
| |
| pid��(sh��)�F(xi��n)�ĺ���(sh��)�����h����пտ���ԇԇ�Կ��ɔ_��ADRC�������^�κθĄӿ�����ģ�M��߀��С�w�C(j��)ԇԇ |
| ������(sh��)��(j��)���շ������a������(j��)�I�Ĺ����f(xi��)�h���� |
| �gӭ���R (http://www.raoushi.com/bbs/) |
Powered by Discuz! X3.1 |