
�@��(g��)����һ��Ԓ����һ�£���ͬ������(bi��o)ֵ��(du��)��(y��ng)���gͬһ��(g��)λ�ã�����(g��)����(bi��o)ֵ��(du��)��(y��ng)ͬһ��(g��)λ�õIJ�һ������������i�ĸ�Դ��
Ȼ����e��(g��)���ӣ�
�����҂���һ��(g��)���h(yu��n)�R��һ��(g��)�Á������h(yu��n)�R�����_�ܣ����҂��������_�ܷ��ڵ����ϣ�ʹ֧�����h(yu��n)�R�����_�ܵ�픲���ƽ���ڵ�ƽ�棨����ƽ�棩�ģ��Ա�ʹ���Q������D(zhu��n)�S��ӛ�� x �S������ȫ�ش�ֱ�ڵ�ƽ��ġ��F(xi��n)�ڣ��҂��Ϳ��Ԍ����h(yu��n)�R�� x �S���D(zhu��n) 360 �ȣ��Ķ��^�죨�����h(yu��n)�R�����ĵģ�ˮƽ����Ȧ�����з���ͨ������������λ�Ƕ�ӛ�� 0 �ȷ�λ�ǡ��ڶ���(g��)����(bi��o)�S����ƽ���ڵ�ƽ��ęM�������(bi��o)�S��ӛ�� y �S��ʹ�����h(yu��n)�R�����������������D(zhu��n)��ͨ������ƽ�泯�������ӛ�� 0 �ȣ��@�ӣ����h(yu��n)�R����������+90 ��ָ����픣���������-90 ��ָ���_�ס����ˣ��f�¾�䡣�F(xi��n)�ڣ�����У����������ϣ���ÿ��(g��)�c(di��n)ֻ��ҪΨһ��һ��(du��) x �� y �Ȕ�(sh��)�Ϳ��Դ_�������� x=90 ��,y=45 ��ָ����c(di��n)��λ�����|����İ�����ϡ�
�F(xi��n)�ڣ������f��(ji��)���i����ô�l(f��)���ġ�һ�Σ��҂�̽�y(c��)����һ��(g��)�w�����N���w�У�λ�����h(yu��n)�R�����|����x=90 �ȣ�y=10 �ȣ��������҂�ֱ�w�^�����҂���ۙ�����w�����w�з����DZ��� x �S�Ƕ� 90 �Ȳ�׃���� y ��ĽǶ������������S���w�������R����y �S�����L��Խ��Խ���Ү�(d��ng) y ��ĽǶ��_(d��)�� 90 �ȕr(sh��)��������Խ����ͻȻ�����D(zhu��n)�������wȥ���@�r(sh��)���҂��l(f��)�F(xi��n)�҂����܌����h(yu��n)�R�����Ϸ�����?y��n)�˕r(sh��) y ���ѽ�(j��ng)�� 90 �ȣ�����҂�ʧȥ��ۙĿ��(bi��o)���@�����f��(ji��)���i��
��ʲô�f���܌����h(yu��n)�R�����Ϸ��أ��҂���������(bi��o)׃�������_ʼ�ģ�x=90 �ȣ�y=10�ȣ�����x=90 �ȣ�y=90 �ȣ����@��(g��)�^�̛]�І��}�����h(yu��n)�R�����D(zhu��n)��(d��ng)��ۙ�w��������(d��ng)�w�������_(d��)��x=90 �ȣ�y=90 �ȣ�������(bi��o)ͻȻ׃�ɣ�x=180 �ȣ�y=90 �ȣ�����?y��n)鳯�ϣ���x �� 90ͻ׃�� 180 ��,�������h(yu��n)�R��Ҫ����ֱ�S�� x �S���D(zhu��n) 180-90=90 ���Ա����w����,���˕r(sh��)�����h(yu��n)�R�ѽ�(j��ng)��ƽ���� x �S���҂�֪����ƽ�������������S���ĵ����D(zhu��n)��׃���˳�����Q�ݽzһ�ӣ��ݽz�^��ָ��׃���������h(yu��n)�R��ָ��߀����픡����������w�����w�h(yu��n)������(bi��o)׃�ɣ�x=180 �ȣ�y<90 �ȣ��r(sh��)��y ��ǜpС�����h(yu��n)�Rֻ�����D(zhu��n)�ص����|ָ�����������d�@���@�f���� x,y ���D(zhu��n)�ǣ��ַQ�W���ǣ����������w�Еr(sh��)�����ܰ�����������ǘӹ�����������������Џģ�x=90 �ȣ�y=10 �ȣ�����x=90 �ȣ�y=90 �ȣ������՚W�������D(zhu��n)�_��(sh��)�������_�ض����ģ�x=90 �ȣ�y=90 �ȣ�����x=180 �ȣ�y=90 �ȣ����ٵ���x=180 �ȣ�y<90 �ȣ�,���՚W�������D(zhu��n)��Ķ������_���ҵ�����������(bi��o)ֵ��׃�����w�������g��λ��׃��һһ��(du��)��(y��ng)�����Ǐģ�x=90 �ȣ�y=90 �ȣ�����x=180 �ȣ�y=90 �ȣ����ٵ���x=180 �ȣ�y<90�ȣ��@��(g��)׃�����w����λ�����B�m(x��)��׃����������(bi��o)ֵ��׃���s�����B�m(x��)�ģ��� 90 ͻ׃��180������ԭ�����ڣ�x=90 �ȣ�y=90 �ȣ��ͣ�x=180 �ȣ�y=90 �ȣ������ͣ�x=����ȣ�y=90 �ȣ��@Щ��ͬ������(bi��o)ֵ��(du��)��(y��ng)���gͬһ��(g��)λ�á�����
ͬ�ӌ�(du��)��2�S����3�S����һ�ӵģ������dz��ġ�������
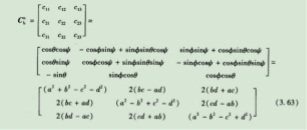
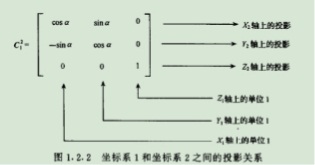
�����f�^�����÷������ұ�ʾʸ��������(bi��o)�S��λ�ã�Ҳ�����f���Եó��d�w����(bi��o)�Sxyz�քe�c��������(bi��o)�SXYZ�ķ������ҡ��γ����Ҿ��
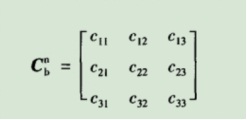
��i�С���j�е�Ԫ�ر�ʾ��������(bi��o)ϵi�S���d�w����(bi��o)ϵj�S�A�ǵ����ҡ�
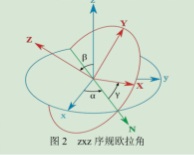
���^�^���ٱ��^һ�W���Ǻͷ��������䌍(sh��)�]��ʲô�^(q��)�e�������÷������ұ�ʾ�W���ǡ��@�ɂ�(g��)������(bi��o)׃�Q�ڡ��T�Ԍ�(d��o)�������涼������(y��ng)���ƌ�(d��o)������̎�ԣ�
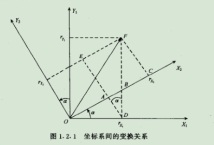
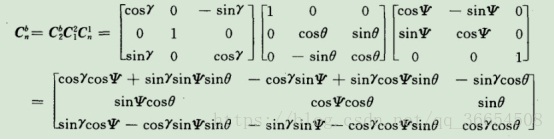
����(g��)����(bi��o)�S��׃�Q�þ�ꇱ�ʾ�����@��
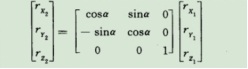
��̎���f��һ�¾�ꇵ����x��
C ��ʾ����(bi��o)ϵ1������(bi��o)ϵ2��׃�Q���
�ھ��Դ���(sh��)�Ѓɏ�(f��)�s��ꇵ�׃����ͨ�^���ľ����˵��\(y��n)��@�ã���(d��ng)Ȼ������(bi��o)ϵ��ͬ��Ҳ�m�á�������(bi��o)ϵ�κΏ�(f��)�s�Ľ�λ���P(gu��n)ϵ�����Կ������λ������D(zhu��n)�ĽM��