��(bi��o)�}: �w˼�����o(w��)��С܇�ļ��g(sh��)�O(sh��)Ӌ(j��)�Y�� [��ӡ���(y��)]
����: kangzhenhua �r(sh��)�g: 2018-12-14 10:11
��(bi��o)�}: �w˼�����o(w��)��С܇�ļ��g(sh��)�O(sh��)Ӌ(j��)�Y��
���@�����һƪ�w˼�����o(w��)��С܇�ļ��g(sh��)�Y�ϡ�
��Ҫ��(n��i)�ݰ���ϵ�y(t��ng)���w�O(sh��)Ӌ(j��)���������ذ��O(sh��)Ӌ(j��)��������ģ�K�O(sh��)Ӌ(j��)�ȵȡ�
�@�ݼ��g(sh��)��(b��o)���У��҂�С�Mͨ�^(gu��)��(du��)���w�������·���㷨���{(di��o)ԇ��܇�v����(sh��)�Ľ�B��Ԕ�M���U�����҂���˼��̈́�(chu��ng)�⣬���w���F(xi��n)���·�Ą�(chu��ng)���O(sh��)Ӌ(j��)���Լ��㷨����Ī�(d��)���뷨������(du��)��Ƭ�C(j��)���w����(sh��)���{(di��o)ԇҲ�҂��������D���Ąڄ�(d��ng)���@�݈�(b��o)���������҂�����Ѫ���ǻۣ����҂���ͬŬ����ijɹ���
�ڜ�(zh��n)���ِ���^(gu��)���У��҂�С�M�ɆT��C���ơ�ģʽ�R(sh��)�e�����м��g(sh��)����܇��ӡ�늚⡢Ӌ(j��)��C(j��)���C(j��)е�ȶ���(g��)�W(xu��)�ƣ��@��ĥ����(du��)�҂���֪�R(sh��)�ںϺ͌�(sh��)�`��(d��ng)�����������B(y��ng)�ИO����Ƅ�(d��ng)���ã��ڴ�Ҫ���x���A��W(xu��)�����x�������@�(xi��ng)�������x�ĿƼ���(j��ng)ِ�����Ї�(gu��)��Ҳ���x�����Ƽ���W(xu��)���P(gu��n)�W(xu��)Ժ��(du��)�˴α�ِ���P(gu��n)ע���҂��ijɹ��x���_(k��i)�W(xu��)У�Ĵ���֧�ּ�ָ��(d��o)�ώ�Ϥ�ĵĽ̌�(d��o)��߀Ҫ���x���Ǻ��҂�һ���f(xi��)�����(du��)�T�����f(xi��)�������٣�����ʹ�҂��܉��ߵ����졣
����
Ŀ�
��һ�¡������O(sh��)Ӌ(j��)
1.1ϵ�y(t��ng)���w�������x��
1.2ϵ�y(t��ng)���w�������O(sh��)Ӌ(j��)
�Y(ji��)
�ڶ��¡�����܇�C(j��)е�Y(ji��)��(g��u)�{(di��o)���c��(y��u)��
2.1����܇܇�w�C(j��)е��ģ
2.2����܇ǰ݆��λ���{(di��o)��
2.2.1���N��A��
2.2.2���N��(n��i)�A��
2.2.3܇݆��A��
2.2.4 ǰ݆ǰ��
2.3����܇�D(zhu��n)��C(j��)��(g��u)�{(di��o)����(y��u)��
2.4����܇��݆�p���X݆�C(j��)��(g��u)�{(di��o)��
2.5�����C(j��)е�Y(ji��)��(g��u)���{(di��o)��
�����¡��·�O(sh��)Ӌ(j��)�f(shu��)��
3.1 ���ذ���O(sh��)Ӌ(j��)
3.1.1 �Դ����ģ�K
3.1.2 늙C(j��)�(q��)��(d��ng)ģ�K
3.1.3 ���ذ��O(sh��)Ӌ(j��)
3.1.4 �ӿ�ģ�K
3.1.5 ��̖(h��o)�ɼ�ģ�K
3.2 ����܇������ģ�K�O(sh��)Ӌ(j��)
3.2.1��늂�������ԭ��
3.2.2 ������������O(sh��)Ӌ(j��)
�����¡�����܇����ܛ���O(sh��)Ӌ(j��)�f(shu��)��
4.1�������·�����_�R(sh��)�e���g(sh��)
4.1.1 ��늂�����·���R(sh��)�e��B(t��i)����
4.1.2 ��늂�����·���R(sh��)�e�㷨
4.2�������Է���
4.3���������ƶ�
�����¡��_(k��i)�l(f��)���ߡ����������b���{(di��o)ԇ�^(gu��)���f(shu��)��
5.1 �_(k��i)�l(f��)����
5.2 �{(di��o)ԇ�^(gu��)��
�����¡�ģ��܇����Ҫ���g(sh��)����(sh��)�f(shu��)��
6.1 ����܇���΅���(sh��)
6.2 �·���օ���(sh��)
6.3 ����܇ģԭ�е��(q��)��(d��ng)늙C(j��)����C(j��)֮���ŷ�늙C(j��)��(sh��)��
�Y(ji��)Փ
�����īI(xi��n)
��һ�¡������O(sh��)Ӌ(j��)������Ҫ��(ji��n)Ҫ�ؽ�B����܇ϵ�y(t��ng)���w�������x���Ϳ��w�O(sh��)Ӌ(j��)˼·���ں�����¹�(ji��)�Ќ�����(g��)ϵ�y(t��ng)�֞�C(j��)е�Y(ji��)��(g��u)������ģ�K�������㷨��������(du��)����܇����ϵ�y(t��ng)�M(j��n)������Ľ�B������
1.1ϵ�y(t��ng)���w�������x��ͨ�^(gu��)�W(xu��)��(x��)��(j��ng)ِҎ(gu��)�t�����ø�(j��ng)ِ���P(gu��n)���g(sh��)�Y���˽��·���R(sh��)�eģ�K������܇ϵ�y(t��ng)���P(gu��n)�Iģ�K֮һ��·���R(sh��)�e�����ĺÉģ�ֱ���P(gu��n)ϵ����K���ܵă�(y��u)�ӣ���˴_��·���R(sh��)�eģ�K������ǛQ������܇���w�������P(gu��n)�I����D2.1����Ŀǰ�܉���������܇�v·���R(sh��)�e�Ă�������Ҫ�й�늂�������CCD/CMOS����������늂��������E�����ă�(y��u)�c(di��n)���·��(ji��n)�Ρ���̖(h��o)̎���ٶȿ죬������ǰհ���x���ޣ�CCD�z���^���E�����ă�(y��u)�c(di��n)�t�ǿ��Ը��h(yu��n)����ظ�ِ֪����׃����������̖(h��o)̎��s���^��(f��)�s����Ό�(du��)�z���^ӛ䛵ĈD���M(j��n)��̎�����R(sh��)�e���ӿ�̎���ٶ��ǔz���^�������y�c(di��n)֮һ���ڱ��^�˃ɷN��������(y��u)��֮���]��CCD�������D��̎�������y�Q���x�Ñ�(y��ng)�ÏV���Ĺ�늂�����������ͨ�^(gu��)�x�ô�ǰհ�Ĺ�늂���������֮����(ji��n)�ij�����ƺ��^�����Ϣ̎���ٶȣ���늂�����߀�ǿ��ԘO�õĿ���Ч���ġ�
�D1.1 ��늂�������ِ܇�cCCD��������ِ܇
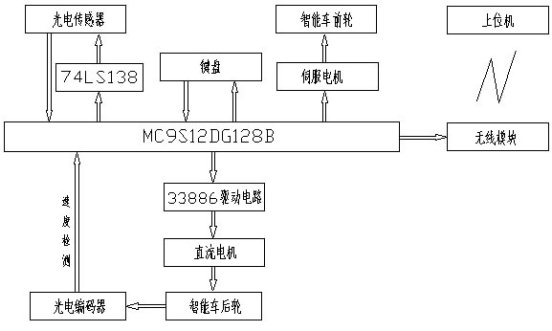
1.2ϵ�y(t��ng)���w�������O(sh��)Ӌ(j��)��(j��ng)ِҎ(gu��)�tҎ(gu��)��������܇ϵ�y(t��ng)�����w˼������16λ������MC9S12DG128B��Ƭ�C(j��)������Ŀ��Ɔ�Ԫ��������܇ϵ�y(t��ng)�Ŀ��ơ����x������܇ϵ�y(t��ng)���ù�늂�����������ِ܇��λ����̖(h��o)��܇�wǰ���Ĺ�늂������ɼ�����(j��ng)S12 MCU��I/O��̎��������ِ܇���\(y��n)��(d��ng)���ƛQ�ߣ�ͬ�r(sh��)��(n��i)��ECTģ�K�l(f��)��PWM�����(q��)��(d��ng)ֱ��늙C(j��)��(du��)����܇�M(j��n)�м��ٺ͜p�ٿ��ƣ��Լ��ŷ�늙C(j��)��(du��)ِ܇�M(j��n)���D(zhu��n)����ƣ�ʹِ܇��ِ�����܉�������������̵ĕr(sh��)�g�����ٶ�����ȫ�̡����ˌ�(du��)ِ܇���ٶ��M(j��n)�о��_�Ŀ��ƣ�������܇���S�ϰ��b��늾��a�����ɼ�܇݆�D(zhu��n)�ٵ��}�_��̖(h��o)����(j��ng)MCU���@���M(j��n)��PID�Ԅ�(d��ng)���ƣ��������܇�ٶȵ��]�h(hu��n)���ơ����⣬߀�������I�P(p��n)����ݔ��ݔ���O(sh��)�䣬��������܇�ĽǶȺͷ�λ���ơ�ϵ�y(t��ng)���w����D��D1.2��
1
������ȫ��(gu��)��W(xu��)��������܇��Ո(q��ng)ِ���g(sh��)��(b��o)��
�D1.2ϵ�y(t��ng)���w����D
����(j��)����ϵ�y(t��ng)�����O(sh��)Ӌ(j��)��ِ܇�������ߴ�ģ�K��MC9S12DG128B����ģ�K��������ģ�K���Դģ�K��늙C(j��)�(q��)��(d��ng)ģ�K���ٶșz�y(c��)ģ�K�o���{(di��o)ԇģ�K����ģ�K���������£�
MC9S12DG128B����ģ�K����������(g��)����܇�ġ����X�������ɼ���늂���������늾��a���Ȃ���������̖(h��o)������(j��)�����㷨�������ƛQ�ߣ��(q��)��(d��ng)ֱ��늙C(j��)���ŷ�늙C(j��)��Ɍ�(du��)����܇�Ŀ��ơ�
������ģ�K��������܇�ġ��۾���������ͨ�^(gu��)һ����ǰհ�ԣ���ǰ��֪ǰ����ِ����Ϣ��������܇�ġ����X�������Q���ṩ��Ҫ������(j��)�ͳ���ķ���(y��ng)�r(sh��)�g��
�Դģ�K��������(g��)ϵ�y(t��ng)�ṩ���m���ַ�(w��n)�����Դ��
늙C(j��)�(q��)��(d��ng)ģ�K���(q��)��(d��ng)ֱ��늙C(j��)���ŷ�늙C(j��)�������܇�ļӜp�ٿ��ƺ��D(zhu��n)����ơ�
�ٶșz�y(c��)ģ�K���z�y(c��)��������܇��݆���D(zhu��n)�٣������ٶȵ��]�h(hu��n)���ơ�
�o���{(di��o)ԇģ�K��Ҫ��������܇ϵ�y(t��ng)�Ĺ����{(di��o)ԇ��ِ܇��B(t��i)�O(ji��n)�صȷ��档
С�Y(ji��)�������c(di��n)����������܇ϵ�y(t��ng)���w�������x����B��ϵ�y(t��ng)�Ŀ��w�O(sh��)Ӌ(j��)���Լ���(ji��n)Ҫ�ط�����ϵ�y(t��ng)��ģ�K�����á��ڽ����¹�(ji��)�У�����(du��)����(g��)ϵ�y(t��ng)�C(j��)е�Y(ji��)��(g��u)������ģ�K�Ϳ����㷨������(g��)����Č�(sh��)�F(xi��n)�M(j��n)��Ԕ��(x��)��B��
�ڶ��¡�����܇�C(j��)е�Y(ji��)��(g��u)�{(di��o)���c��(y��u)��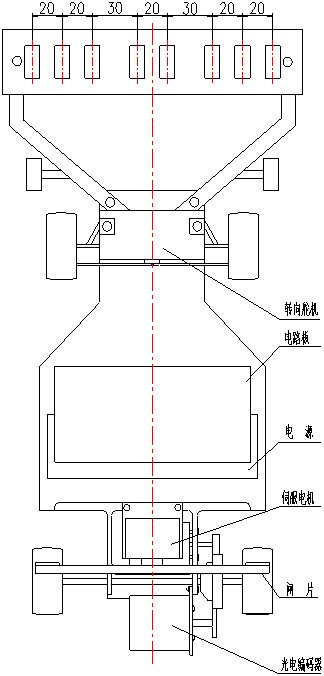
�҂���(du��)�C(j��)е�Y(ji��)��(g��u)��Ҫ���ǣ���(ji��n)�ζ���Ч���҂�?c��)ڲ���ćLԇ��_�������µ��O(sh��)Ӌ(j��)����:
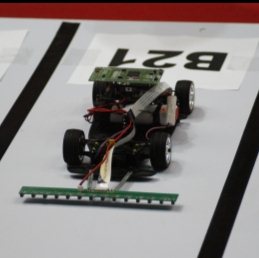
�D2.1 ����܇�������ֈD
����܇ϵ�y(t��ng)�κεĿ��ƶ�����һ���ęC(j��)е�Y(ji��)��(g��u)���A(ch��)�ό�(sh��)�F(xi��n)�ģ�������O(sh��)Ӌ(j��)����(g��)ܛ���ܘ�(g��u)���㷨֮ǰһ��Ҫ��(du��)����(g��)܇ģ�ęC(j��)е�Y(ji��)��(g��u)��һ��(g��)���Ե��J(r��n)�R(sh��)��Ȼ��������(y��ng)�Ĕ�(sh��)�W(xu��)ģ�͡��Ķ���ᘌ�(du��)���w���O(sh��)Ӌ(j��)������(l��i)�{(di��o)��ِ܇�ęC(j��)е�Y(ji��)��(g��u)�����ڌ�(sh��)�H���{(di��o)ԇ�^(gu��)���в���ĸ��M(j��n)����ߡ�������Ҫ��B����܇܇ģ�ęC(j��)е�Y(ji��)��(g��u)���{(di��o)��������
2.1����܇܇�w�C(j��)е��ģ�˴θ�(j��ng)ِ�x�õ�����܇��(j��ng)ِ����܇ģ(G768����܇ģ)������܇�Ŀ��Ʋ��õ���ǰ݆�D(zhu��n)��݆�(q��)��(d��ng)����������܇�����δ������£�
�D2.2 ����܇���ΈD
������ijߴ煢��(sh��)���2.1��
��2.1 ģ��܇�����ߴ煢��(sh��)
2.2����܇ǰ݆��λ���{(di��o)���F(xi��n)����܇����������^(gu��)���У�����ʹ��܇ֱ����(w��n)�����D(zhu��n)���p�㣬�D(zhu��n)������Ԅ�(d��ng)�������p��݆̥���D(zhu��n)��ϵ�����ĥ�p�ȣ����D(zhu��n)��݆���D(zhu��n)��(ji��)��ǰ�S֮�g��γ�һ��������(du��)���bλ�ã���܇݆��λ������Ҫ�ą���(sh��)�У����N��A�����N��(n��i)�A��܇݆��A��ǰ��[2]������܇��(j��ng)ِģ��܇�����(xi��ng)����(sh��)�������{(di��o)������������ģ��܇�ӹ������쾫�ȵĆ�(w��n)�}����ͨ�õ�Ҏ(gu��)����߀������һЩżȻ�ԡ�
2.2.1���N��A�����N��A����ָ�ڿv��ƽ���(n��i)���N�S���c���洹ֱ��֮�g�ĊA��[2]������܇�v�D(zhu��n)���r(sh��)��(hu��)�a(ch��n)���c܇݆ƫ�D(zhu��n)�����෴�Ļ������أ�ʹ܇݆�Ԅ�(d��ng)�֏�(f��)��ԭ��(l��i)�����gλ���ϡ����ԣ����N��A��Խ��܇��Խ�ߣ�ǰ݆�Ԅ�(d��ng)������������Խ��(qi��ng)�������^(gu��)��Ļ������ؕ�(hu��)ʹ܇�v�D(zhu��n)����ء�ͨ�����N��A��ֵ�O(sh��)����1�㵽3�㡣
ģ��܇ͨ�^(gu��)���p�Sɫ�|Ƭ�Ĕ�(sh��)����(l��i)��׃���N��A�ǵģ����ڸ�(j��ng)ِ���õ��D(zhu��n)���C(j��)���ز����^(gu��)������N��A�Ǖ�(hu��)ʹ�D(zhu��n)��׃�ó��أ��D(zhu��n)������(y��ng)�t���������O(sh��)�Þ�0�㣬�Ա��������D(zhu��n)����`���ԡ�
2.2.2���N��(n��i)�A�����N��(n��i)�A����ָ�ڙM��ƽ���(n��i)���N�S���c���洹ֱ��֮�g�ĊA�ǣ���������Ҳ��ʹǰ݆�Ԅ�(d��ng)����[2]���Ƕ�Խ��ǰ݆�Ԅ�(d��ng)���������þ�Խ��(qi��ng)�����D(zhu��n)��r(sh��)Ҳ��Խ�M(f��i)����݆̥ĥ�p����֮���Ƕ�ԽСǰ݆�Ԅ�(d��ng)���������þ�Խ����ͨ����܇�����N��(n��i)�A�Dz�����8�㡣
��(du��)��ģ��܇��ͨ�^(gu��)�{(di��o)��ǰ����ݗU���L(zh��ng)�ȿ��Ը�׃���N��(n��i)�A�ǵĴ�С�������^(gu��)��ă�(n��i)�A��Ҳ��(hu��)�����D(zhu��n)������������݆̥ĥ�p���������{(di��o)���r(sh��)���Խ����{(di��o)����0��~3�����ң�����̫��
���N��(n��i)�A�����N��A����ʹ��܇�D(zhu��n)���Ԅ�(d��ng)����������ֱ�����Ĺ��ܡ���֮ͬ̎�����N��(n��i)�A�Ļ����c܇�ٟo(w��)�P(gu��n)�����N��A�Ļ����c܇�����P(gu��n)����˸��ٕr(sh��)���N��A�Ļ������ô��ٕr(sh��)���N��(n��i)�A�Ļ������ô�
2.2.3܇݆��A��ǰ݆��A����ָͨ�^(gu��)܇݆���ĵ���܇�M��ƽ���c܇݆ƽ��Ľ����c���洹��֮�g�ĊA��[2]����(du��)��܇���D(zhu��n)��������ֱ��Ӱ푣��������������ǰ݆���D(zhu��n)��ȫ�Ժ��D(zhu��n)��ٿv���p����[1]������܇�ęM��ƽ���(n��i)��݆̥�ʡ��ˡ����͕r(sh��)�Q�顰ؓ(f��)��A�������ʬF(xi��n)��V�����Ώ��_(k��i)�r(sh��)�Q������A�����܇݆��ֱ����һ���M�d���a(ch��n)��׃�Σ���������܇݆�ϲ����(n��i)�A��(c��)����(d��o)��܇݆(li��n)�Ӽ��p�ġ��������Ȍ�܇݆Уƫһ��(g��)����A�Ƕȣ�һ���@��(g��)�Ƕȼs��1�����ң��Ԝp�ٳ��d�S��ؓ(f��)�ɣ��������ʹ�É����������܇�İ�ȫ���ܡ�
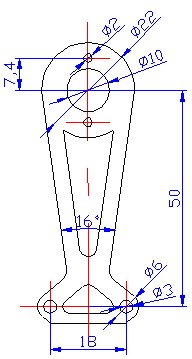
ģ��܇�ṩ�ˌ��T(m��n)����A���{(di��o)������������{(di��o)��(ji��)����A�ǡ����ڸ�(j��ng)ِ��ģ����Ҫ���ڸ�(j��ng)�٣�����Ҫ��M���p�p��������ױP(p��n)��ǰ���ϳ��ܵ��d�ɲ���������A���{(di��o)����0�㼴�ɣ�����Ҫ�cǰ݆ǰ��ƥ�䡣
2.2.4 ǰ݆ǰ�����^ǰ����ָ��݆֮�g�ĺ���x��(sh��)ֵ�cǰ���x��(sh��)ֵ֮�Ҳָǰ݆���ľ��c�v�����ľ��ĊA��[2]��ǰ݆ǰ���������DZ��C��܇��������ܣ��p��݆̥��ĥ�p��ǰ݆�ڝL��(d��ng)�r(sh��)����T������Ȼ��݆̥���(n��i)ƫб�����ǰ���m��(d��ng)��݆̥�L��(d��ng)�r(sh��)��ƫб����͕�(hu��)������݆̥��(n��i)���(c��)ĥ�p�ĬF(xi��n)���(hu��)�p�١����(n��i)�����ǘ�ǰ��С��˴�ķQ�顰ǰ��������֮�t�Q�顰��������ؓ(f��)ǰ�������ڌ�(sh��)�H����܇�У�һ��ǰ����0~12mm ��
��ģ��܇�У�ǰ݆ǰ����ͨ�^(gu��)�{(di��o)���ŷ�늙C(j��)����(d��ng)�����ҙM���U��(sh��)�F(xi��n)�ġ����N�ڴ�ֱ�����λ�ô_����׃���ҙM���U���L(zh��ng)�ȼ����Ը�׃ǰ݆ǰ���Ĵ�С���ڌ�(sh��)�H���{(di��o)���^(gu��)���У��҂��l(f��)�F(xi��n)�^С��ǰ�����s��0~2mm���ԜpС�D(zhu��n)��������ʹģ��܇�D(zhu��n)������p�㣬����(sh��)�HЧ������ʮ�����@��
�mȻģ��܇�����N��A�ǡ����N��(n��i)�A�ǡ�܇݆��A�Ǻ�ǰ���Ⱦ������{(di��o)������������܇ģ�ӹ������쾫�ȵĆ�(w��n)�}����ͨ�õ�Ҏ(gu��)����߀���������ٵ�żȻ�ԣ�һ���nj�(sh��)�H�{(di��o)����Ч�����(zh��n)��
2.3����܇�D(zhu��n)��C(j��)��(g��u)�{(di��o)����(y��u)��������D(zhu��n)��ģ�ͣ���ָ��݆̥���r(sh��)���������҃ɂ�(c��)݆̥�������������a(ch��n)����׃�Σ�����݆̥������Ӱ��µ�׃�Εr(sh��)܇�v�ĵ��D(zhu��n)��ģ�����@�N�����ģ���£�܇�w���D(zhu��n)��돽����Ӌ(j��)��õ���
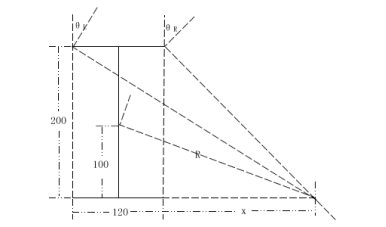
�D2.3 ����܇�D(zhu��n)��ʾ��D
��D2.3�����O(sh��)����܇ϵ�y(t��ng)��������D(zhu��n)��ģ�ͣ���������λ��������ġ�܇݆�M���D(zhu��n)��ԭ��������݆���S���c��݆�S���@���lֱ����Ȼ����һ�c(di��n)��
�D(zhu��n)��C(j��)��(g��u)��܇�v�\(y��n)���^(gu��)���������dz���Ҫ�����á����m��ǰ����D(zhu��n)��C(j��)��(g��u)���Ա��C��܇�vֱ������^(gu��)���в���(hu��)��ƫ���ܱ��C܇�v���ķ���(w��n)���ԣ�����܇�v�D(zhu��n)��r(sh��)�����m���D(zhu��n)��C(j��)��(g��u)����ʹ܇�v���лص�ֱ������B(t��i)�����кõĻ����ԡ����������@Щԭ���D(zhu��n)��ϵ�y(t��ng)��(y��u)���O(sh��)Ӌ(j��)�ɞ�����܇�O(sh��)Ӌ(j��)�ЙC(j��)е�Y(ji��)��(g��u)���ֵ����c(di��n)��ֱ���P(gu��n)ϵ��ِ܇�ܷ��������ɱ�ِ���ڌ�(sh��)�H�����У��҂�ͨ�^(gu��)��ՓӋ(j��)��ķ����M(j��n)�Ѓ�(y��u)����Ȼ��������(sh��)�H�Y(ji��)��(g��u)���(y��n)�C��Փ��(sh��)��(j��)�����ڌ�(sh��)�H�{(di��o)ԇ�^(gu��)���в�����M(j��n)��
��ģ��܇�����^(gu��)���У�ِ܇���D(zhu��n)����ͨ�^(gu��)��C(j��)����(d��ng)���ҙM���U��(l��i)��(sh��)�F(xi��n)�ġ��D(zhu��n)���C(j��)���D(zhu��n)��(d��ng)�ٶȺ�����һ����Ҫ��ӿ��D(zhu��n)��C(j��)��(g��u)푑�(y��ng)���ٶȣ�Ψһ���k�����ǃ�(y��u)����C(j��)�İ��bλ�ú����������L(zh��ng)�U���L(zh��ng)�ȡ����ڹ������ٶ��c���س˷e�ĺ���(sh��)���^(gu��)�����ٶȣ���ȻҪ�pʧ���أ�����̫СҲ��(hu��)����D(zhu��n)���t�g������O(sh��)Ӌ(j��)�r(sh��)��Ҫ�C�Ͽ��]�D(zhu��n)��C(j��)��(g��u)푑�(y��ng)�ٶ��c��C(j��)����֮�g���P(gu��n)ϵ��ͨ�^(gu��)��(y��u)���õ�һ��(g��)��ѵ��D(zhu��n)��Ч������(j��ng)�^(gu��)���Č�(sh��)�H�ą���(sh��)�O(sh��)Ӌ(j��)Ӌ(j��)�㣬���ó�һ���Է�(w��n)������Ч�����ą���(sh��)���C(j��)��(g��u)��
��D3.3���҂���K�O(sh��)Ӌ(j��)���@���D(zhu��n)�����U���҂��C�Ͽ��]���ٶ��cŤ���g���P(gu��n)ϵ��������(j��)ģ��܇�ױP(p��n)�ľ��w�Y(ji��)��(g��u)����(ji��n)���˰��b��ʽ����(sh��)�F(xi��n)���A(y��)��Ŀ��(bi��o)��
�D3.3 �D(zhu��n)�����U�D
2.4����܇��݆�p���X݆�C(j��)��(g��u)�{(di��o)��ģ��܇��݆����RS-380SH 늙C(j��)�(q��)��(d��ng)��늙C(j��)�S�c��݆�S֮�g�Ă���(d��ng)�Ȟ� 18��76��늙C(j��)�S�X݆�X��(sh��)��18�����S����(d��ng)�X��(sh��)��76�����X݆����(d��ng)�C(j��)��(g��u)��(du��)܇ģ���(q��)��(d��ng)�����кܴ��Ӱ푡��X݆����(d��ng)���ְ��bλ�õIJ�ǡ��(d��ng)����(hu��)�������늙C(j��)�(q��)��(d��ng)��݆��ؓ(f��)�d����(hu��)��(y��n)��Ӱ���K�ɿ�(j��)���{(di��o)����ԭ�t�ǣ��ɂ���(d��ng)�X݆�S����ƽ��, �X݆�g������g϶Ҫ���m���^(gu��)�����״���X݆���^(gu��)�o�֕�(hu��)���ӂ���(d��ng)���������M(f��i)��(d��ng)��������(d��ng)����Ҫ�p�ɡ�형����������t�������������(d��ng)�ĬF(xi��n)���Д��X݆����(d��ng)�Ƿ����õ�����(j��)�ǣ� (t��ng)һ��늙C(j��)����(d��ng)��݆���D(zhu��n)�r(sh��)���������̶�������f(shu��)���X݆�g������g϶�^(gu��)����(d��ng)����ײ�X�F(xi��n)�������������t�����t�f(shu��)���X݆�g������g϶�^(gu��)С�����߃��X݆�S��ƽ�У�늙C(j��)ؓ(f��)�d׃���{(di��o)���õ��X݆����(d��ng)������С�����Ҳ���(hu��)����ײ��s������݆�p���X݆�C(j��)��(g��u)�ͻ������{(di��o)�����ˣ���(d��ng)�����fʮ��������
2.5�����C(j��)е�Y(ji��)��(g��u)���{(di��o)�����⣬��ģ��܇�ęC(j��)е�Y(ji��)��(g��u)����߀�кܶ���Ը��M(j��n)�ĵط��������f(shu��)܇݆���Ҽܡ��ױP(p��n)��܇���߶ȵȡ�
ģ��܇�ڸ��ٵėl���£�2.3m/s~3.5m/s�������ڿ���׃���ļӜp���^(gu��)�̣�ʹ��ģ��܇��݆̥�c݆�y֮�g�����װl(f��)������(du��)λ�ƣ����܌�(d��o)���ڼ��ٕr(sh��)��(hu��)�pʧ�����(q��)��(d��ng)�����ڌ�(sh��)�(y��n)���{(di��o)ԇ������ِ܇�ڸ�����ÿ����һȦ��݆̥�c݆�y֮�gͨ����(hu��)�a(ch��n)���ׂ�(g��)��������(du��)λ�ƣ���(y��n)��Ӱ���ِ܇�ļ����^(gu��)�̡����˽�Q�@��(g��)��(w��n)�}���҂�?c��)ڌ?sh��)�H�{(di��o)ԇ�^(gu��)���Ќ�(du��)܇݆�M(j��n)����ճ̥̎����������Ч�ط�ֹ����݆̥�c݆�y�e(cu��)λ��������(q��)��(d��ng)���pʧ����r��
���⣬�҂�߀��(du��)ģ��܇��ǰ��Ҽ��ɵ��A(y��)�o���M(j��n)���{(di��o)��(ji��)���x�ò�ͬ����ϵ�y(t��ng)�ď��ɵȷ����M(j��n)���˸��M(j��n)�����Ҍ�(du��)܇���߶ȣ��Լ��ױP(p��n)���Π���|(zh��)�� ����݆��݆��ȣ����M(j��n)��������(y��ng)�ĸ��M(j��n)���{(di��o)������ȡ���˲��e(cu��)Ч����
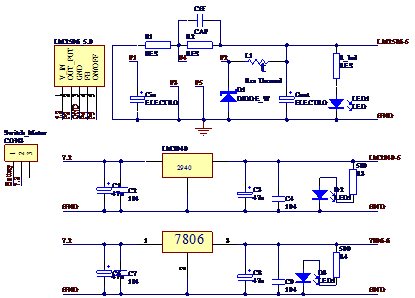
�����¡��·�O(sh��)Ӌ(j��)�f(shu��)��3.1 ���ذ���O(sh��)Ӌ(j��)3.1.1 �Դ����ģ�K�D3.1 �Դ����ģ�Kԭ��D
�Դģ�K��(du��)��һ��(g��)����ϵ�y(t��ng)��(l��i)�f(shu��)�O����Ҫ���P(gu��n)ϵ������(g��)ϵ�y(t��ng)�Ƿ��܉�����������������O(sh��)Ӌ(j��)����ϵ�y(t��ng)�r(sh��)��(y��ng)�x�ú��m���Դ��
��(j��ng)ِҎ(gu��)�tҎ(gu��)������ِʹ������܇��(j��ng)ِ�y(t��ng)һ��l(f��)�Ę�(bi��o)��(zh��n)܇ģ��7.2V 2000mAh Ni-cd��늣�����Ƭ�C(j��)ϵ�y(t��ng)��·���R(sh��)�e�Ĺ�늂���������늴a���a���Ⱦ���Ҫ5V�Դ���ŷ�늙C(j��)����늉�����4V��6V��������ŷ�늙C(j��)푑�(y��ng)�ٶȣ�����7.2V ��늣���ֱ��늙C(j��)����ʹ��7.2V 2000mAh Ni-cd��늳�ֱ�ӹ�늣�����܇늉��{(di��o)��(ji��)�·ʾ��Ҋ(ji��n)�D3��
5V�Դģ�K���ڞ��Ƭ�C(j��)ϵ�y(t��ng)��������ģ�K�ȹ�늡����õ��Դ�д�(li��n)�;��Է�(w��n)���Դ��LM2940��7805�ȣ����_(k��i)�P(gu��n)�ͷ�(w��n)���Դ��LM2596��LM2575�ȣ��ɴ��ǰ�߾��мy��С���·�Y(ji��)��(g��u)��(ji��n)�εă�(y��u)�c(di��n)������Ч���^�ͣ����Ĵ��߹���С��Ч�ʸߣ����·�s���^��(f��)�s���·�ļy����(du��)�چ�Ƭ�C(j��)����Ҫ�ṩ��(w��n)����5V�Դ������LM2940�ķ�(w��n)���ľ��Զȷdz��ã������x��LM2940-5�Ϊ�(d��)��(du��)���M(j��n)�й�늣�������ģ�K�t��Ҫͨ�^(gu��)�^����������LM2596-5���D(zhu��n)�QЧ�ʸߣ����d������ȱ�c(di��n)����y��늉����m������Ƭ�C(j��)�Դ�����^(gu��)��(du��)����ģ�K���߀���ܱ��C��늵��Դ������LM2940-5��LM2596-5��(du��)����ϵ�y(t��ng)�͈�(zh��)�в����_(k��i)��늣�������Ч�ط�ֹ������֮�g�l(f��)���ɔ_���Լ��������Ć�(w��n)�}��ʹ��ϵ�y(t��ng)�܉�(w��n)���ع���
3.1.2 늙C(j��)�(q��)��(d��ng)ģ�K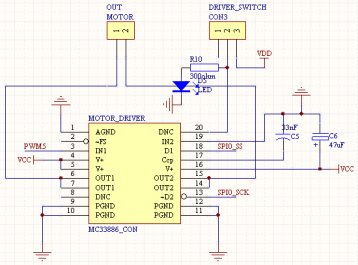
�D3.2 늙C(j��)�(q��)��(d��ng)ģ�Kԭ��D
늙C(j��)�(q��)��(d��ng)�������k���ṩ��33886�����(q��)��(d��ng)оƬ�� MCUͨ�^(gu��)IN1���_ݔ��PWM�������{(di��o)��(ji��)33886��DNC�ڵ�ݔ��늉�,�{(di��o)��(ji��)늙C(j��)�D(zhu��n)�ٵĿ�����������IN2��ݔ��늉����{(di��o)��(ji��)늙C(j��)�ķ��D(zhu��n)���Ƅ�(d��ng)���ܡ�
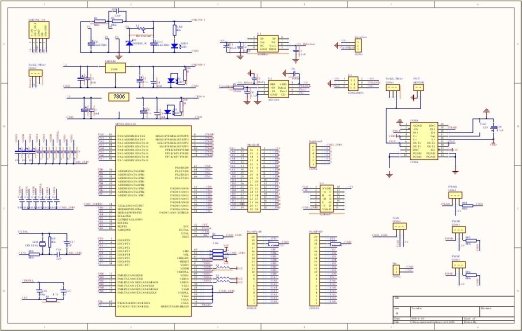
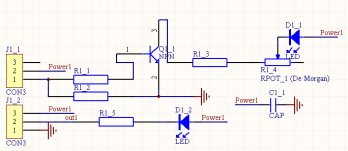
3.1.3 ���ذ��O(sh��)Ӌ(j��)����܇����ϵ�y(t��ng)�����·�D3.3��
�D3.3 MC9S12DG128���ذ��·�D
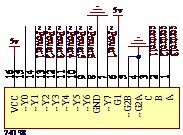
����܇ϵ�y(t��ng)��MC68S912DG128B����ƺ��ģ�����ֱ���������A��W(xu��)��S12��Сϵ�y(t��ng)�壬�������O(sh��)Ӌ(j��)��һ�K����·�����ذ塣��D4.3 ��ʾ��MC9S12DG128��Ƭ�C(j��)�ڿ���ϵ�y(t��ng)����Ҫʹ�õĹ��_���£���Ҫ�����˂����������c�z�y(c��)���֡�늙C(j��)�(q��)��(d��ng)���֡�ECT���֡�BDM �{(di��o)ԇ�ӿ��Լ����������·�Ľӿڵȡ�
��3.1 MC9S12DG12��Ƭ�C(j��)���_�����
|
| | |
| |
| |
| |
| |
| 7279�I�P(p��n)/4·�x��ָʾ�� |
| |
| | |
| |
| |
| |
| |
| | |
| |
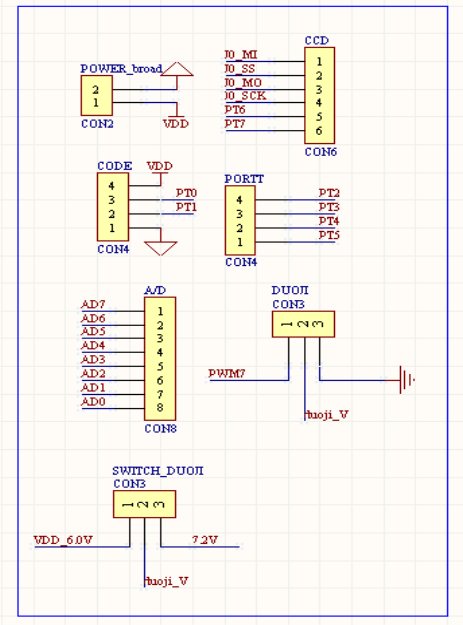
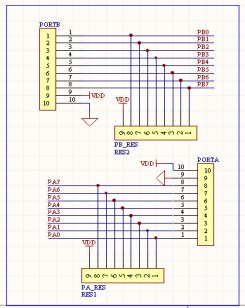
3.1.4 �ӿ�ģ�K
�D3.4 �ӿ�ģ�Kԭ��D
�ӿ�ģ�K�����ü��ⲿ�O(sh��)���Ƭ�C(j��)�Ľӿڣ��քe��늙C(j��)�ӿڣ��D(zhu��n)������C(j��)�ӿڣ��ŷ�늙C(j��)�ӿڣ���늾��a���ӿڣ��Դ�ӿڡ�
3.1.5 ��̖(h��o)�ɼ�ģ�K�ĺ�(ji��n)�����O(sh��)Ӌ(j��)�Ƕȣ��҂�ֱ�ӏ����������Դ���ϴ�(li��n)��������裬�ٺ�늂��д�(li��n)ʹ�á����������ڹ�늂������z�y(c��)�r(sh��)���������������á������������أ���(ji��n)�����·�Y(ji��)��(g��u)��
�D3.5 ��̖(h��o)�ɼ�ģ�Kԭ��D
3.2 ����܇������ģ�K�O(sh��)Ӌ(j��)�ڴ_������܇���w�����r(sh��)���҂��x���늂������ķ��������˫@�ø���ǰհ���x�������ϵ�y(t��ng)���m(x��)̎���A�ø���ĕr(sh��)�g���ڏı����늂��������x���˴�ǰհ�ļ����������ǰհ���x�����_(d��)����ͨ��늂������Ĕ�(sh��)������ʮ�ױ�����ȫ�M�㸂(j��ng)ِ��Ҫ��
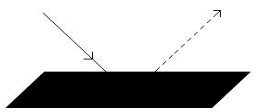
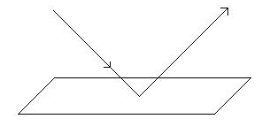
3.2.1��늂�������ԭ����늂������z�y(c��)·����Ϣ��ԭ�����ɰl(f��)��ܰl(f��)��һ�����L(zh��ng)�ļt�⾀����(j��ng)���淴�䵽���չ�[13]����D4.7�������ں�ɫ�Ͱ�ɫ�Ϸ���ϵ��(sh��)��ͬ���ں�ɫ�ϴֹ⾀�����գ�����ɫ�Ͽ��Է���شֹ⾀�����Խ��յ��ķ���⏊(qi��ng)�Dz�һ�ӣ��M(j��n)����(d��o)�½��չܵ����������l(f��)��׃���̶Ȳ�ͬ�������ⲿ�^�y(c��)���Խ����J(r��n)����չ܃ɶ�ݔ����費ͬ���M(j��n)����(j��ng)�։����늉��Ͳ�һ�ӣ��Ϳ��Ԍ��ڰ�·��^(q��)���_(k��i)��(l��i)��
�D3.6 ��늂�����ԭ��
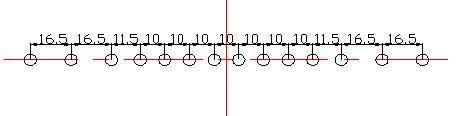
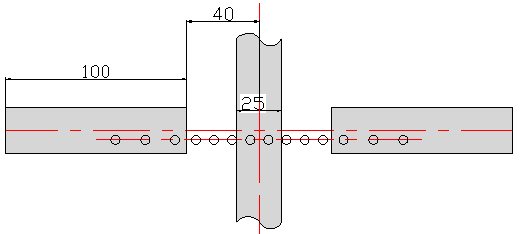
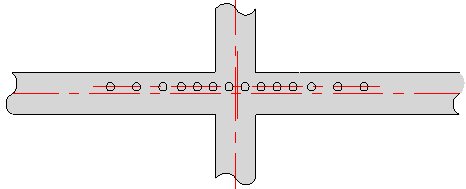
3.2.2 ������������O(sh��)Ӌ(j��)����������c��ͨ�Ĺ�늂�����ԭ������һ�ӣ�������ǰհ�����h(yu��n)������ͨ�Ĺ�늂������������_(d��)��40-50���ף���(du��)������܇��(l��i)�f(shu��)�ѽ�(j��ng)���
�ڸ�(j��ng)ِ�У�Ҏ(gu��)�tҎ(gu��)�����������ܳ��^(gu��)16��(g��)�����x����14��(g��)��������������еĂ������ʡ�һ�����Ų�����D4.8������������Ƀɲ��ݘ�(g��u)�ɣ�һ���ݞ�l(f��)�䲿�ݣ�һ���֞���ղ��ݡ��l(f��)�䲿����һ��(g��)��ʎ�ܰl(f��)��180KHz�l�ʵ���ʎ����(j��ng)���O�ܷŴ���ܰl(f��)�⣻���ղ�����һ��(g��)��ƥ��180KHz�Ľ��չܽ��շ��صĹ⏊(qi��ng)����(j��ng)�^(gu��)��ݞV����ֱ�ӽ���S12��Ƭ�C(j��)��PA�cPB��(PA�cPB�ڃ���8λ�Ĕ�(sh��)��(j��)�ڽM��һ��(g��)16λ�Ĕ�(sh��)��(j��)�ڣ����ڙz�y(c��)14·��������̖(h��o))���z�y(c��)����늉��ĸߵ͡����ڼ��������ʹ�����{(di��o)��̎�������չ�ֻ�ܽ�����ͬ�l�ʵķ���⣬���������Ч��ֹ��Ҋ(ji��n)�⌦(du��)���伤���Ӱ푡�
�D3.7 ����������l(f��)���c�����·
�D3.8 ����������Ŀ����·
���˺�(ji��n)��14·����������Ŀ��ƣ��p�ټ���������֮�g�ĸɔ_���������Ŀ��Ʋ����˷֕r(sh��)�l(f��)��IJ��ԣ�ʹ��74LS138����֕r(sh��)����������D4.9����S12��3��(g��)IO�ځ�(l��i)����7�M���������_(k��i)�࣬ͬһ�r(sh��)�g����ÿ�M������h(yu��n)�ă�·�������l(f��)�⣬�@�ӽ��չܾͽ��ղ��������������l(f��)��ļ����ˣ�����_(d��)���˷�ֹ�������֮�g�ɔ_��Ŀ�ġ�
�����¡�����܇����ܛ���O(sh��)Ӌ(j��)�f(shu��)��4.1�������·�����_�R(sh��)�e���g(sh��)������܇ϵ�y(t��ng)�У���늣����⣩��������������(g��)ϵ�y(t��ng)�ġ��۾������䌦(du��)��·�����R(sh��)�e�ڿ���ϵ�y(t��ng)���Ȟ���Ҫ��
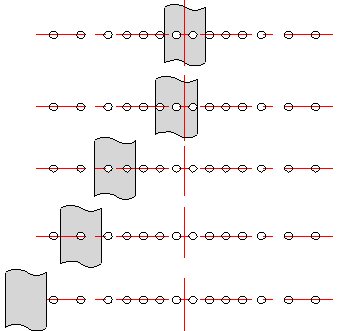
4.1.1 ��늂�����·���R(sh��)�e��B(t��i)�����������ø�(j��ng)ِ��(du��)��늂������Ų���ʽ�о��ѽ�(j��ng)���^���룬���y(t��ng)�ġ�һ�������Ų���ʽ�ڱ����Ų���ʽ��Ч���@��������õ�һ�N�Ų���ʽ��ģ��܇Ҳ�������������ij���Ă��������g(sh��)�����Ų���ʽ��D5.1��
�D4.1 ģ��܇���������һ���Ų��D
��(du��)���҂�ģ��܇����������ِ���Ͽ��ܵĠ�B(t��i)�У�����ͨ��ِ��̎�������c(di��n)̎����ʮ�ֽ��澀̎���քe���D����δ�г����еĠ�B(t��i)�D�������挢�քe�M(j��n)�з�����
�D4.2�������������ِͨ����
�D4.3 ������������c(di��n)̎
�D4.4 �����������ʮ�ֽ��澀̎
�����R(sh��)�eِ܇��̎��ʲô�Ӡ�B(t��i)�£������M(j��n)��ِ��ӛ�����ٶȿ��ƣ���(du��)���҂��Ĕ�(sh��)���ͼ����������ÿ��(g��)������ֻ��0�c1 �ɷN��B(t��i)���҂��քe��14·��������(bi��o)ӛ��1��14̖(h��o)��������ÿ��(g��)�������ֿ��Ԍ�(du��)��(y��ng)һ��(g��)�Ƿ��ںھ��ϵĘ�(bi��o)־λ���քe��Sen_Flag[0]��Sen_Flag[13]������(y��ng)�ںھ��Ϟ�1�����ںھ��Ϟ�0���Ķ�ͨ�^(gu��)��(du��)��һ�r(sh��)�̂�������(bi��o)־λ���xȡ�Ϳ���֪���˕r(sh��)ģ��܇�Ġ�B(t��i)��
���˾��_���R(sh��)�e���ܾ���ʮ�ֽ��澀���ڳ����O(sh��)Ӌ(j��)�r(sh��)߀���x��һ��(g��)����Sen_ChangeCount��׃������ʾ��������B(t��i)׃������1׃?y��u)?����0׃?y��u)?���ĴΔ�(sh��)��
������Ă�������B(t��i)�D�п����p�ɿ���������ِͨ���ϳ�����ِ܇�Ƴ�ِ��֮�������׃���Δ�(sh��)����2�Σ��������ܾ�̎ģ��܇�Ă�������B(t��i)׃���Δ�(sh��)��4�Σ���ʮ�ֽ��澀�r(sh��)��������B(t��i)׃���Δ�(sh��)��0�Ρ�
�����M(j��n)һ���Ѹ��N��B(t��i)���_(k��i)���ڳ�����߀���x��׃��Sen_FlagCount�����ڽy(t��ng)Ӌ(j��)���Ђ�������B(t��i)��(bi��o)־λ֮�ͣ����ںھ��ϵĂ������Ĕ�(sh��)Ŀ���Y(ji��)�����ώׂ�(g��)׃�����Ϳ��Ԝ�(zh��n)�_�ط������(g��)��������B(t��i)�ˡ�����(g��)��������B(t��i)���±���
��4.1 ��������B(t��i)���
ͨ�^(gu��)�ϱ����Ϳ����p�ɵذ�ģ��܇��һ�r(sh��)�̵Ă�������B(t��i)�R(sh��)�e����(l��i)��Ҳ��ِ��ӛ���R(sh��)�e���c(di��n)���ṩ�ı�Ҫ�ı��ϡ�
4.1.2 ��늂�����·���R(sh��)�e�㷨·���R(sh��)�e�㷨���҂�ʹ�õ���ģ���㷨���@�N�㷨�ă�(y��u)�c(di��n)���܉����(j��)���������صĠ�B(t��i)ֵ���õ�܇������ƫ�x�ھ��ij̶ȣ�߀����ͨ�^(gu��)һ�����㷨��Ӌ(j��)�����C(j��)���D(zhu��n)��Ƕȣ�������һ���̶��Ͼ��п���С�ɔ_�����������w�㷨��B���£�

�D4.5 ����������ȡֵ����D
��1������ÿ��(g��)�������M(j��n)�мә�(qu��n)̎�����o����(y��ng)����(g��)�������ę�(qu��n)��ֵ����D5.5��ʾ��
��2������(d��ng)�������z�y(c��)���ھ��r(sh��)����(y��ng)�Ă������������ڵę�(qu��n)��ֵ����Ӌ(j��)�����Ђ�������ƽ���ә�(qu��n)ֵ����ƫ�x�̶ȡ�Ӌ(j��)�㹫ʽ��:

ʽ(4 .1)
ʽ�У�Sen_Flag�錦(du��)��(y��ng)�������Ġ�B(t��i)ֵ��Sen_QuanZhong�錦(du��)��(y��ng)�������ę�(qu��n)��ֵ��Sen_Jiaquan��������ļә�(qu��n)ƽ��ֵ��
for(i=0;i<14;i++)
{
Sen_Jiaquan+=(Sen_Flag*Sen_QuanZhong);
Sen_FlagCount+=Sen_Flag;
}
Sen_Jiaquan= Sen_Jiaquan /Sen_FlagCount;
���ϳ���μ�����Ӌ(j��)����˕r(sh��)ģ��܇�������ļә�(qu��n)ƽ��ֵ���ɴ˿��Եõ�ģ��܇�Ġ�B(t��i)������һ�����ƛQ���ṩ��Ҫ����Ϣ��
��3��������ƫ�x�̶ȺͶ�C(j��)�D(zhu��n)��(d��ng)�Ƕ�����(du��)��(y��ng)��PWM�}���P(gu��n)ϵ��ģ�ͣ��M�϶��ߵĺ���(sh��)�P(gu��n)ϵ������
���@���҂��J(r��n)���C(j��)�D(zhu��n)��(d��ng)�ĽǶ��Ǻ�PWM�}���ɾ��Ե������P(gu��n)ϵ�������һ�κ���(sh��)��(l��i)Ψһ�_��PWM�}���c��C(j��)�D(zhu��n)��(d��ng)�Ƕ�֮�g���P(gu��n)ϵ��
������һ�κ���(sh��)���̞飺

ʽ4 .2)
ʽ�У�TurnAngle���C(j��)��(y��ng)�D(zhu��n)�ĽǶȣ�PWMMiddle��܇݆�[���Ƕ�C(j��)PWM�}����(y��ng)�x��PWMDTYx��ֵ��Sen_Jiaquan���ɂ�������B(t��i)��õ�ƫ�x�̶ȣ�PWMHalf���C(j��)�����Ĕ[��܇݆���S�����ֵPWMDTYx��׃��ֵ��F(xi��n)actor ��Ӱ푱�����(sh��)���ɴˣ��҂�������ڲ�ͬ�Ă�������B(t��i)�¶�C(j��)��(y��ng)�D(zhu��n)�ĽǶȡ�
4.2�������Է���
��܇�v�M(j��n)���r(sh��)����Ҫ��(du��)����(g��)����(sh��)�M(j��n)���O(sh��)�����Џ�·�����D(zhu��n)��Ƕȡ��돝�ٶȡ�
���У��Џ�·����Ҫ�Q����܇�v���x���(n��i)���^(gu��)��߀������^(gu��)�����Ѓ�(n��i)����·��(j��ng)��̣�����������渽��ϵ��(sh��)�^(gu��)С��(hu��)��(d��o)��܇�v���F(xi��n)��(c��)���IJ���(w��n)������B(t��i)��ԭ�����Ѓ�(n��i)���r(sh��)�����ʰ돽�^(gu��)С��ͬ�r(sh��)�ٶ��ֺܿ죬����ģ��܇��Ҫ����������(hu��)�ܴ�ِ��������ƽ��Y(ji��)��(g��u)����������ȫ���Ɂ�(l��i)�Ե����Ħ�����ṩ�����ِ������ĸ���ϵ��(sh��)����(du��)ِ܇���\(y��n)�Р�B(t��i)�кܴ�Ӱ푡��������·����(hu��)���L(zh��ng)�������и�����{(di��o)���C(j��)��(hu��)��ͬ�r(sh��)���ʰ돽�����ӕ�(hu��)ʹ��ģ��܇���ԓ��и��ߵ��^(gu��)���ٶȡ�
�D(zhu��n)��ǶțQ����܇�v�^(gu��)���ķ�(w��n)���ԡ����m���D(zhu��n)��Ƕȕ�(hu��)�p��܇�v���D(zhu��n)���r(sh��)���{(di��o)�������H·�����Ա��C�(y��u)���\(y��n)��(d��ng)��B(t��i)�ķ�(w��n)��Ҳ��(hu��)����(l��i)Ч�ʵ���ߣ��p�ٕr(sh��)�g���ڿ��]�D(zhu��n)��Ƕ��O(sh��)�Õr(sh��)��Ҫע�����ׂ�(g��)��(w��n)�}����(du��)�ڙz�y(c��)ِ��ƫ�����Ă��������ԣ��������^С�r(sh��)���D(zhu��n)���`���ȣ��z�y(c��)���^���r(sh��)���D(zhu��n)���`���ȣ���(du��)�����S����׃���B�m(x��)������̎����
��(du��)���돝�ٶȵķ�������(y��ng)ԓ�C�Ͽ��]·�����D(zhu��n)��Ƕȵ�Ӱ푡���(ji��n)�ζ��ԣ��҂���(hu��)��ȡ�돝�p�٣��������ٵķ������@����Փ�Ͽ��Ԝp���^(gu��)���r(sh��)���M(f��i)�ĕr(sh��)�g��Ȼ�������^(gu��)ȥ�ñ�ِ�У�ͨ�^(gu��)�^�����ِ܇��(du��)������̎�����҂��l(f��)�F(xi��n)�����������˶��x������ͬ�ķ���������ǰ���f(shu��)�����ǘӣ���(li��n)ϵ·�����D(zhu��n)��Ƕȣ�ֻ�džμ��ط����^(gu��)���ٶȣ���(hu��)���˼·�ľ��������e(cu��)�`�����磬�ڲ��ܼ��r(sh��)�Д��돝�ͳ����Ę�(bi��o)־�c(di��n)�Ͳ�ȡ���돝�p�١��������١��ķ�������(hu��)���F(xi��n)������(n��i)����B(t��i)����(w��n)����·���ͬ�r(sh��)�������ٕr(sh��)�C(j��)�^(gu��)����һ�ӕ�(hu��)���M(f��i)�r(sh��)�g�����ԬF(xi��n)�ڱ�ϵ�y(t��ng)������(sh��)�H�{�r(sh��)��һЩ��(j��ng)�(y��n)����(du��)�^(gu��)���ٶȵ�̎����ʽ�_���飺�돝�r(sh��)���p�٣��Եõ������{(di��o)���r(sh��)�g���@�����_���D(zhu��n)��Ƕȣ��ڏ�����(n��i)�m��(d��ng)���٣������ֽǶȲ�׃��������r(sh��)�ļ��ٹ�(ji��)�s�r(sh��)�g�������r(sh��)���Ȝ�(zh��n)�_�Д���(bi��o)־��Ȼ����٣��mȻ��(hu��)���M(f��i)һЩ�r(sh��)�g�������挦(du��)�B�m(x��)׃�����Ԝp���Д���e(cu��)�ĸ��ʣ����C����B(t��i)�ķ�(w��n)���ԣ����ҏ�����(n��i)�������ٌ�(du��)���������Ҳ�кܴ�Ď������C�Ͽ��]�ÿ��Խ��յ��~��r(sh��)�g�Q����(w��n)����߀��ֵ�õġ�
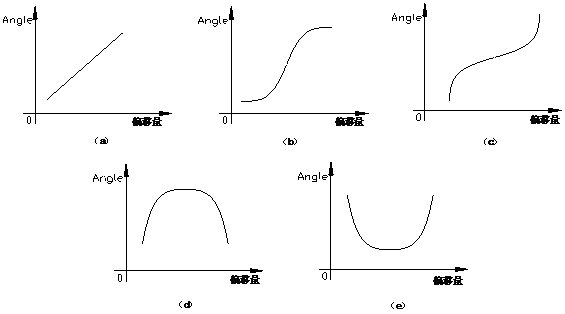
�����Գ�Ҋ(ji��n)�ĎN�����D(zhu��n)��̎����ʽ��ጸ������ă�(y��u)ȱ�c(di��n)�����У��M����(bi��o)��ʾ�ɂ������ɼ���(l��i)��ِ�����ľ�����(du��)ِ܇���ľ���ƫ�������v����(bi��o)��ʾ�D(zhu��n)�Ǵ�С��
�D4.6�����D(zhu��n)��̎����ʽ
a�D��ʾƫ�����c�D(zhu��n)��Ƕȳʾ����P(gu��n)ϵ����Ӌ(j��)�㼰����(xi��)�϶����^��(ji��n)�Σ�Ҳ���Ԍ�(sh��)�F(xi��n)����ِ܇����Ŀ��(bi��o)����������Ҏ(gu��)�t�ƶ����^��(ji��n)�Σ���(du��)ِ܇��(sh��)�H����B(t��i)�ķ�������ȫ�棬�����ڌ�(sh��)�H��(y��ng)�Õr(sh��)���ܺ�(ji��n)�����á�
b�D��ʾ������ِ܇��ƫ�xِ�����ĕr(sh��)����Ҫ��(du��)������̫���{(di��o)���������ڮ�(d��ng)ƫ�x�ȴ��A(y��)��ֵ�r(sh��)�����{(di��o)���D(zhu��n)���Ա��C�^(gu��)���ļ��r(sh��)��ͬ�r(sh��)�����Д���Ǽ�����Ҳ��Ҫ�M(j��n)�д��׃��(d��ng)����?y��n)�˕r(sh��)�D(zhu��n)�ǵ�ֵ�ѽ�(j��ng)�ܴH�茦(du��)��C(j��)�M(j��n)���{(di��o)�Ϳ��Ա��C��������_�ԡ��@�N�����ă�(y��u)�c(di��n)�ǾC�Ͽ��]��ِ܇��(du��)��(g��)�������m��(y��ng)�̶ȣ�ͬ�r(sh��)���C����ֱ�����r(sh��)�ķ�(w��n)���ԣ��Ϳ��ɔ_�ԣ����nj�(du��)������푑�(y��ng)���ܲ��r(sh��)���@��ԓ��������Ҫȱ�c(di��n)��
c�D��ʾ�Č�(du��)������̎�������cB�Dǡ���෴�������������(y��ng)�`���ȣ������˿��ɔ_�ԣ���(du��)�ڶ��������ҏ������ʰ돽�^С��ِ���б��^�õ��m��(y��ng)�ԡ�
d��e�D�ǃɷN���^�����̎��������������������ِ܇��ȫ�̿��ƣ�ֻ�ǿ��]��ِ܇�Č�(sh��)�H�\(y��n)�����c(di��n)��(du��)ij���ֵ�ƫ�������eҪ����ʹ�á���(du��)�ڂ��y(t��ng)��݆܇�v���D(zhu��n)��r(sh��)ǰ݆�б��^��(y��n)��ĽǶ��P(gu��n)ϵ���������ĵõ������D(zhu��n)��ϵ�y(t��ng)�Q���ġ��@�Ӄ���ϵ�y(t��ng)����(du��)ij��(g��)ֵ���������ƣ���Ȼ��(hu��)��ì�ܣ���܇��0���D(zhu��n)������D(zhu��n)�Ǖr(sh��)��������ÿ�r(sh��)ÿ�̶���ͬ�r(sh��)�M��ɷN�l�������ƣ���ô����ِ܇���ķ�(w��n)���ԣ��҂����ܕ�(hu��)��С������(n��i)��(du��)�D(zhu��n)�Dz���(d��ng)���Եõ���������m���D(zhu��n)��ֵ���pСì�ܡ�
4.3���������ƶ�������܇��ِ�У��҂�ʹ�õ���ͨ�ö�ݔ��һݔ��ϵ�y(t��ng)�����Ѓɂ�(g��)ݔ���������ľ�ƫ�������������ɴΙz�y(c��)��ƫ������ֵ��ݔ�������Էքe�x�ö�C(j��)�D(zhu��n)��ֵ���ٶ�ݔ��ֵ������ϵ�y(t��ng)��
���ľ�ƫ�������`�ٶȺ���(sh��)���9��(j��)��
��4.2���ľ�ƫ�������`�ٶȺ���(sh��)��
ƫ������ֵ���`�ٶȺ���(sh��)���3��(j��)��Ӌ(j��)��r(sh��)��Ҫ������100�\(y��n)�㣩��
��4.3ƫ������ֵ���`�ٶȺ���(sh��)��
�ٶ�Ҏ(gu��)�t��飺
��4.4�ٶ�Ҏ(gu��)�t��
�ٶȾ��_ֵ�飺
��4.5�ٶȾ��_ֵ
�D(zhu��n)��Ҏ(gu��)�t��飺
��4.6�D(zhu��n)��Ҏ(gu��)�t��
�D(zhu��n)�Ǿ��_ֵ�飺
��4.7�D(zhu��n)�Ǿ��_ֵ
�@���Ʒ����ǻ���07��ڶ��á��w˼������ȫ��(gu��)��W(xu��)������܇��(j��ng)ِ��Ҫ���ƶ��ģ�����(sh��)�F(xi��n)�ˌ�(du��)��ͬ���ʏ������D(zhu��n)�Ǻ������䣬�ٶȾ��_���Ƶ�Ŀ��(bi��o)��
�����¡��_(k��i)�l(f��)���ߡ����������b���{(di��o)ԇ�^(gu��)���f(shu��)��5.1 �_(k��i)�l(f��)����������_(k��i)�l(f��)���ڽMί��(hu��)�ṩ��CodeWarrior IDE���M(j��n)�еģ�����Դ����ľ���(xi��)�����g��朽ӣ�����K���ɿɈ�(zh��)���ļ���
CodeWarrior for S12 ��������HC1��S12��CPU�Ć�Ƭ�C(j��)Ƕ��ʽ��(y��ng)���_(k��i)�l(f��)ܛ���������������_(k��i)�l(f��)�h(hu��n)��IDE��̎��������?gu��)졢ȫоƬ���桢��ҕ�����?sh��)�@ʾ���ߡ��(xi��ng)Ŀ���̹�������C���澎�g�����R������朽����Լ��{(di��o)ԇ����
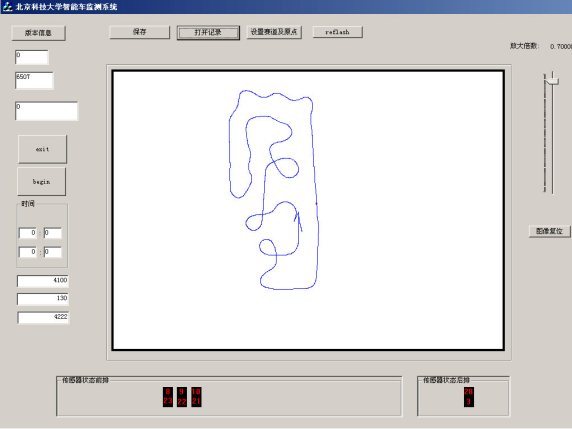
5.2 �{(di��o)ԇ�^(gu��)�����{(di��o)ԇ�^(gu��)���У��҂��_(k��i)�l(f��)����������܇�O(ji��n)�y(c��)����܇��(sh��)�r(sh��)��B(t��i)������܇��(sh��)�r(sh��)�O(ji��n)�y(c��)ϵ�y(t��ng)���܉�ıO(ji��n)�y(c��)����܇���\(y��n)��(d��ng)�^(gu��)�����D(zhu��n)�ǣ���������B(t��i)���ٶȵ���Ϣ���ܴ�ķ���������܇���{(di��o)ԇ��
������D��ʾ��
�D5.1 ِ��ģ�M�Y(ji��)��
�挍(sh��)ِ����D��
�D5.2 �挍(sh��)ِ��
�����¡�ģ��܇����Ҫ���g(sh��)����(sh��)�f(shu��)��
6.1 ����܇���΅���(sh��)
܇�L(zh��ng)��36cm
܇����17cm
܇�ߣ�7cm
܇�أ��s1.5kg
6.2 �·���օ���(sh��)
�҂�С�M�����������܇����һ�K��ِ��(bi��o)��(zh��n)7.2V늳ع�늣��·�й��� 16��(g��)��ݣ�������Ӌ(j��)142.099��F����(d��ng)ģ��܇ȫ�����_(k��i)��(d��ng)�r(sh��)�����ļs��50W ��
6.3 ����܇ģԭ�е��(q��)��(d��ng)늙C(j��)����C(j��)֮���ŷ�늙C(j��)��(sh��)��
����܇ģԭ�е��(q��)��(d��ng)늙C(j��)����C(j��)֮��ʹ����1��(g��)�ŷ�늙C(j��)��
�Y(ji��)Փ
�����³���(b��o)�����ӡ��w˼������������܇��Ո(q��ng)ِ�ԁ�(l��i)���҂�С�M�ɆT�����Y�ϣ��O(sh��)Ӌ(j��)�C(j��)��(g��u)���M�b܇ģ������(xi��)��������(w��n)�}�����K����������Ŀ��(bi��o)�������ˬF(xi��n)���@��(g��)������
�ڴ˷ݼ��g(sh��)��(b��o)���У��҂���Ҫ��B�˜�(zh��n)���ِ�r(sh��)�Ļ���˼·�������C(j��)е���·���Լ�����Ҫ�Ŀ����㷨�Ą�(chu��ng)��˼�롣
�ڙC(j��)е���棬�҂�������W�ͣ�A�ͣ�V�͵��Ų����������]������ķ�(w��n)���ԡ���(ji��n)���ԣ��҂�����ö���һ�����Ų�����ͨ�^(gu��)����(f��)��(sh��)�`�Q���˂������Ĕ�(sh��)����λ�á�
���·���棬�҂���ģ�K��ʽ������Դ������늙C(j��)�(q��)��(d��ng)���ӿڣ����ƣ���̖(h��o)�ɼ����������@����(g��)ģ�K�քe�O(sh��)Ӌ(j��)���ڲ����Y�ϵĻ��A(ch��)�ϸ���(zh��n)���ˎ�������Ȼ���҂��քe��(sh��)�(y��n)������Ԉ�(b��o)�������ᵽ����ʽ?j��ng)Q�����҂���K���·�D��
���㷨���棬�҂�ʹ��C�Z(y��)�Ծ��̣����ñ�ِ���]���_(k��i)�l(f��)�����{(di��o)ԇ����(j��ng)�^(gu��)С�M�ɆT����ӑՓ�����M(j��n)���K���O(sh��)Ӌ(j��)��һ�ױ��^ͨ�õģ���(w��n)���ij������@���㷨�У��҂��Y(ji��)��·�r�{(di��o)��܇�٣�����ֱ�����٣������p�٣����C����̕r(sh��)�g����ȫ�̡�
�F(xi��n)�ڣ��挦(du��)��������(l��i)�Ĵ�ِ���ښv�r(sh��)���傀(g��)�µij�֜�(zh��n)��֮���҂��������ڱ�ِ��ȡ�Ã�(y��u)���ɿ�(j��)��Ҳ�S�҂���֪�R(sh��)߀�����S�������]��(w��n)�}Ҳ����ȫ�棬�����@�ݼ��g(sh��)��(b��o)�������҂��傀(g��)�����ں�ˮ��(l��i)�ĽY(ji��)�����������҂�С�Mÿ��(g��)�˵���Ѫ���ǻۣ��S�������Q�����@�ݽ�(j��ng)�(y��n)�������҂�һ�����ɞ��҂������F�Ļؑ���
������Word��ʽ�ęn51�����d��ַ��
 �����á��w˼��������ȫ��(gu��)��W(xu��)�������Ƽ���W(xu��)���һ�(du��)���g(sh��)��(b��o)��.doc
(4.44 MB, ���d��(sh��): 22)
�����á��w˼��������ȫ��(gu��)��W(xu��)�������Ƽ���W(xu��)���һ�(du��)���g(sh��)��(b��o)��.doc
(4.44 MB, ���d��(sh��): 22)
2018-12-14 10:07 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5
| �gӭ���R (http://www.raoushi.com/bbs/) |
Powered by Discuz! X3.1 |