��(bi��o)�}: ��Ƭ�C(j��)ֱ��늙C(j��)PWM(�{(di��o)��)����ϵ�y(t��ng)����+�����O(sh��)Ӌ(j��) [��ӡ���]
����: ���g2 �r(sh��)�g: 2018-12-3 20:37
��(bi��o)�}: ��Ƭ�C(j��)ֱ��늙C(j��)PWM(�{(di��o)��)����ϵ�y(t��ng)����+�����O(sh��)Ӌ(j��)

0.png (41.25 KB, ���d��(sh��): 139)
���d����
2018-12-3 22:43 �ς�
Ŀ�
1 ����
2 ϵ�y(t��ng)Փ��
2.1 �O(sh��)Ӌ(j��)����
2.2 �O(sh��)Ӌ(j��)˼·
2.3 ϵ�y(t��ng)����O(sh��)Ӌ(j��)
3 PWM�}���{(di��o)�ƶ���
3.1 PWM�{(di��o)��ԭ��
3.2 PWM�{(di��o)�ٷ���
3.3 PWM��(sh��)�F(xi��n)����
4 ϵ�y(t��ng)Ӳ���O(sh��)Ӌ(j��)
4.1 ϵ�y(t��ng)�����M��
4.1.1 Ӳ��ģ�K�M��
4.1.1 ��Ƭ�C(j��)����(g��)����ģ�K
4.2 AT89S52��Ƭ�C(j��)��(ji��n)��
4.2.1 AT89S52��Ҫ����
4.2.2 AT89S52��Ҫ�������e
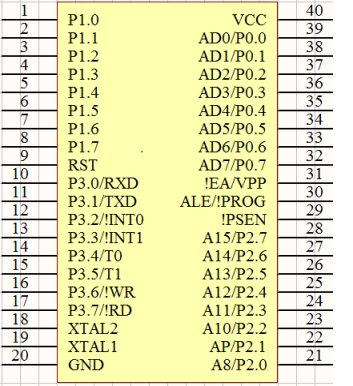
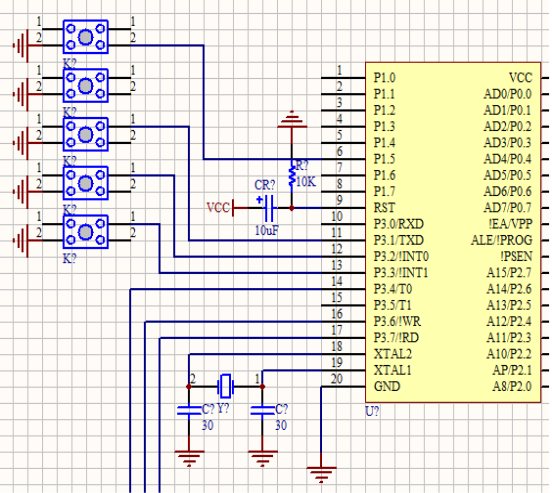
4.2.3 AT89S52�����_���ܽ�B
4.2.4 AT89S52�ă�(n��i)���YԴ
4.3 L298늙C(j��)�(q��)��(d��ng)ģ�K
4.3.1 L298늙C(j��)�(q��)��(d��ng)��(ji��n)��
4.3.2 L298��(n��i)��ԭ��D
4.3.3 L298���_��̖(h��o)������
4.3.4 L298߉����
4.4 LED��(sh��)�a���@ʾ
4.4.1 LED��(ji��n)��
4.4.2 LED�߶Δ�(sh��)�a�ܵĽY(ji��)��(g��u)
4.4.3 ��Ҋ��(sh��)�ֺ��ַ����ֶδa
4.4.4 LED��(sh��)�a���c��Ƭ�C(j��)���B��
4.4.5 ��(ji��n)�εij�������
4.4.6 ��ϵ�y(t��ng)�І�Ƭ�C(j��)�cLED���B��
4.5 ��(d��)��ʽ�I�P����ģ�K
4.5.1 �I�P�Ĺ��ܼ����
4.5.2 ��(d��)��ʽ�I�P
4.5.3 ��(d��)��ʽ�I�P�c��Ƭ�C(j��)���B��
5 ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)
�Y(ji��)Փ
���x
�����īI(xi��n)
���
���1
���2
1 ��������ֱ������(d��ng)�Ŀ���ϵ�y(t��ng)����ģ�M���x������(g��u)�ɣ�����ģ�M����������е�ȱ�c(di��n)������ڜ�Ư����Ư늉�����(g��u)��ϵ�y(t��ng)�������^�࣬ʹ��ģ�Mֱ������(d��ng)ϵ�y(t��ng)�Ŀ��ƾ��ȼ��ɿ����^�͡��S��Ӌ(j��)��C(j��)���Ƽ��g(sh��)�İl(f��)չ��̎�����ѽ�(j��ng)�V��ʹ����ֱ������(d��ng)ϵ�y(t��ng)����(sh��)�F(xi��n)��ȫ��(sh��)�ֻ����ơ�����̎�����Ԕ�(sh��)����̖(h��o)�����������ֶ��`��㣬���ɔ_������(qi��ng)�����ԣ�ȫ��(sh��)��ֱ���{(di��o)�ٿ��ƾ��ȡ��ɿ��Ժͷ�(w��n)���Ա�ģ�Mֱ���{(di��o)��ϵ�y(t��ng)�����ߡ����ԣ�ֱ������(d��ng)���Ʋ���̎������(sh��)�F(xi��n)ȫ��(sh��)�ֻ���ʹֱ���{(di��o)��ϵ�y(t��ng)�M(j��n)��һ��(g��)���µ��A�Ρ�
̎�����Q�����ς�(g��)���o(j��)��ʮ������S�������·��Ҏ(gu��)ģ������Ҏ(gu��)ģ�����·���칤ˇ��Ѹ�ٰl(f��)չ��̎�������ԃr(ji��)��Խ��Խ�ߡ����⣬���������Ӽ��g(sh��)�İl(f��)չ��������ˇ��������ʹ�ô����������������Ѹ����ߡ���̎�����ձ����ڿ���늙C(j��)�ṩ�˿��ܣ�����̎��������늙C(j��)��ɸ��N�·f�ġ������ܵĿ��Ʋ��ԣ�ʹ늙C(j��)�ĸ��N���������õ���ֵİl(f��)�]��ʹ늙C(j��)�����ܸ����Ϲ��I(y��)���a(ch��n)ʹ��Ҫ��߀���M(j��n)��늙C(j��)���a(ch��n)���аl(f��)�����N�粽�M(j��n)늙C(j��)���oˢֱ��늙C(j��)���_�P(gu��n)����늄�(d��ng)�C(j��)�ȱ��ڿ����Ҍ�(sh��)�õ�����늙C(j��)��ʹ늙C(j��)�İl(f��)չ���F(xi��n)���µ�׃����
��(du��)�ں�(ji��n)�ε�̎��������늙C(j��)��ֻ��������̎���������^���������_�P(gu��n)Ԫ������ʹ�·�_ͨ���P(gu��n)��ͿɌ�(sh��)�F(xi��n)��(du��)늙C(j��)�Ŀ��ơ��F(xi��n)�ڎ�̎�����Ŀɾ��̿��������ѽ�(j��ng)�ڸ��N�ęC(j��)���O(sh��)����N�����a(ch��n)��ˮ�����ձ�õ���(y��ng)�ã�ͨ�^��(du��)�ɾ��̿������M(j��n)�о��̾Ϳ��Ԍ�(sh��)�F(xi��n)��(du��)늙C(j��)��Ҏ(gu��)�ɻ����ơ���(du��)�ڏ�(f��)�s��̎��������늙C(j��),�tҪ����̎��������늙C(j��)��늉���������D(zhu��n)�ء��D(zhu��n)�١��D(zhu��n)�ǵȣ�ʹ늙C(j��)���o����ָ���(zh��n)�_������ͨ�^̎�������ƣ���ʹ늙C(j��)�������кܴ����ߡ�Ŀǰ���ֱ��늙C(j��)�ͽ���늙C(j��)�����������L(zh��ng)����ֱ��늙C(j��)�{(di��o)�����ܺã������ЙC(j��)е�Q�������ЙC(j��)еĥ�p���Q��Ȇ��}������늙C(j��)����Փ�Ǯ���늙C(j��)߀��ͬ��늙C(j��)���Y(ji��)��(g��u)����ֱ��늙C(j��)��(ji��n)�Σ�����Ҳ��ֱ��늙C(j��)�ɿ��������l�ʺ㶨��늾W(w��ng)���\(y��n)�Еr(sh��)���������ٶȲ��ܷ������(j��ng)��(j��)���{(di��o)��(ji��)[2]�������ܵ�̎������DSP (DIGITAL SIGNAL PROCESSOR����(sh��)����̖(h��o)̎����)�ij��F(xi��n)��������µĿ�����Փ�Ϳ��Ʋ����ṩ�����õ����|(zh��)���A(ch��)��ʹ늙C(j��)����(d��ng)���Ԅ�(d��ng)���̶ȴ����ߡ������M(j��n)�Ĕ�(sh��)�ؙC(j��)���Ȕ�(sh��)��λ���ŷ�ϵ�y(t��ng)���ѽ�(j��ng)��������DSP�ȵĸ���̎���������(zh��)���ٶȿ��_(d��)��(sh��)���f������ÿ�룬�Ҿ����m�ϵľ���\(y��n)�㡣
2ϵ�y(t��ng)Փ��
2��1�O(sh��)Ӌ(j��)����
��������S���Ƽ����M(j��n)���������Ӽ��g(sh��)�õ���Ѹ�ٵİl(f��)չ��ֱ��늙C(j��)�õ���Խ��Խ�V���đ�(y��ng)�á�ֱ�������Ѓ�(y��u)�����{(di��o)������,�{(di��o)��ƽ��������,�{(di��o)�ٷ����V;�^�d������,�ܳ����l���ě_��ؓ(f��)�d,�Ɍ�(sh��)�F(xi��n)�l���ğo��(j��)��������(d��ng)���Ƅ�(d��ng)�ͷ��D(zhu��n);��Ҫ�ܝM�����a(ch��n)�^���Ԅ�(d��ng)��ϵ�y(t��ng)���N��ͬ�������\(y��n)��Ҫ�Ķ���(du��)ֱ��늙C(j��)���{(di��o)��������^�ߵ�Ҫ��׃늘л�·����{(di��o)�٣���׃늘�늉��{(di��o)�ٵȼ��g(sh��)���h(yu��n)�h(yu��n)���ܝM��Ҫ���@�r(sh��)ͨ�^PWM��ʽ����ֱ��늙C(j��)�{(di��o)�ٵķ�����(y��ng)�\(y��n)������
2��2 �O(sh��)Ӌ(j��)˼·
ֱ��늙C(j��)PWM����ϵ�y(t��ng)����Ҫ���ܰ�������(sh��)�F(xi��n)��(du��)ֱ��늙C(j��)�ļ��١��p���Լ�늙C(j��)�����D(zhu��n)�����D(zhu��n)�ͼ�ͣ�����ҿ����{(di��o)��늙C(j��)���D(zhu��n)�٣��܉�ܷ���Č�(sh��)�F(xi��n)늙C(j��)�����ܿ��ơ�
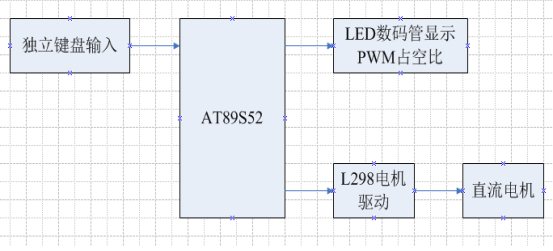
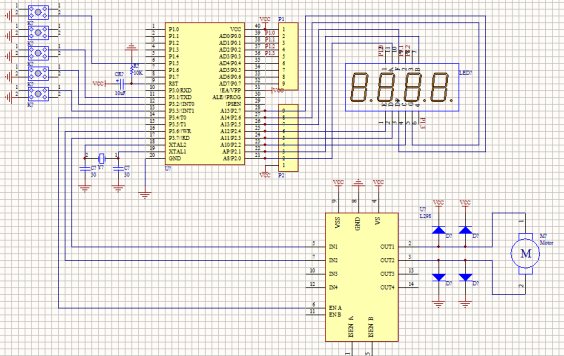
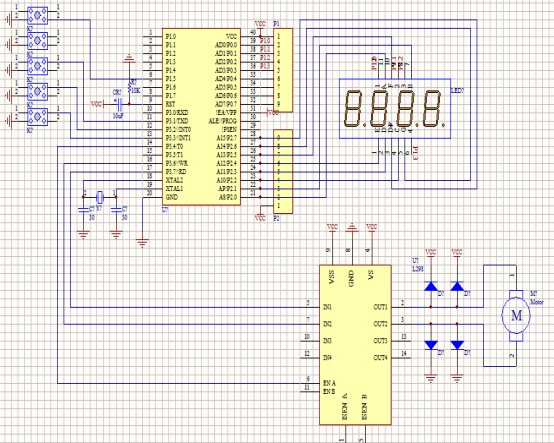
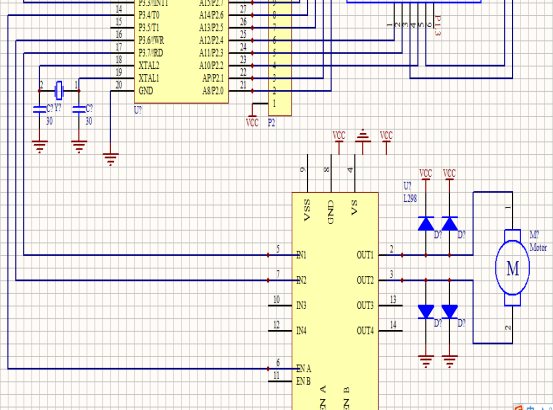
���w�·����ֱ��늙C(j��)PWM����ģ�K���@�����·��Ҫ��AT89S52��Ƭ�C(j��)��I/O�˿ڡ����r(sh��)Ӌ(j��)��(sh��)�����ⲿ�Д��U(ku��)չ�ȿ���ֱ��늙C(j��)�ļ��١��p���Լ�늙C(j��)�����D(zhu��n)�ͷ��D(zhu��n)�����ҿ����{(di��o)��늙C(j��)���D(zhu��n)�٣��܉�ܷ���Č�(sh��)�F(xi��n)늙C(j��)�����ܿ��ơ����g��ͨ�^AT89S52��Ƭ�C(j��)�a(ch��n)���}�����{(di��o)���}�_��̖(h��o)��ݔ�뵽L298�(q��)��(d��ng)оƬ������ֱ��늙C(j��)�����ġ�ԓֱ��늙C(j��)PWM����ϵ�y(t��ng)�������·ģ�K�M�ɣ�
�O(sh��)Ӌ(j��)ݔ�벿�֣��@һģ�K��Ҫ�����Î��Д�Ī�(d��)��ʽ�I�P�팍(sh��)�F(xi��n)��(du��)ֱ��늙C(j��)�ļ��١��p���Լ�늙C(j��)�����D(zhu��n)�����D(zhu��n)�ͼ�ͣ���ơ�
�O(sh��)Ӌ(j��)���Ʋ��֣���Ҫ��AT89S52��Ƭ�C(j��)���ⲿ�Д��U(ku��)չ�·�M�ɡ�ֱ��늙C(j��)PWM���ƌ�(sh��)�F(xi��n)������Ҫ��һЩ���O�ܡ�늙C(j��)��L298ֱ��늙C(j��)�(q��)��(d��ng)ģ�K�M�ɡ�
�O(sh��)Ӌ(j��)�@ʾ���֣� LED��(sh��)�a�@ʾ���֣���(sh��)�F(xi��n)��(du��)PWM�}���{(di��o)��ռ�ձȵČ�(sh��)�r(sh��)�@ʾ��
2��3 ϵ�y(t��ng)����O(sh��)Ӌ(j��)
ֱ��늙C(j��)PWM�{(di��o)�ٷ���
�����f����ֱ��늙C(j��)PWM�{(di��o)��ϵ�y(t��ng)��AT89S52��Ƭ�C(j��)����ƺ��ģ�������ݔ��ģ�K��LED�@ʾģ�K��늙C(j��)�(q��)��(d��ng)ģ�K�M�ɡ����Î��Д�Ī�(d��)��ʽ�I�P���������ݔ�룬��Ƭ�C(j��)�ڳ�������£����r(sh��)����oL298ֱ��늙C(j��)�(q��)��(d��ng)оƬ�l(f��)��PWM���Σ�H���(q��)��(d��ng)�·���늙C(j��)�������D(zhu��n)�ͼ�ͣ���ƣ�ͬ�r(sh��)��Ƭ�C(j��)��ͣ�Č�PWM�}���{(di��o)��ռ�ձ��͵�LED��(sh��)�a����Ɍ�(sh��)�r(sh��)�@ʾ��
3PWM�}���{(di��o)��ԭ��
3��1PWM�{(di��o)��ԭ��
�d�ɶ˵�늉����Ķ��_(d��)������Ҫ���һ�N늉��{(di��o)��������PWM���ԑ�(y��ng)�����S��棬���磺늙C(j��)�{(di��o)PWM���}�_�����{(di��o)�ƣ���ͨ�^���ƹ̶�늉���ֱ���Դ�_�P(gu��n)�l�ʣ���׃ؓ(f��)�١��ضȿ��ơ��������Ƶȵ�[7]��
��PWM�(q��)��(d��ng)���Ƶ��{(di��o)��ϵ�y(t��ng)�У���һ��(g��)�̶����l�ʁ���ͨ�͔��_�Դ�����Ҹ���(j��)��Ҫ��׃һ��(g��)���ڃ�(n��i)����ͨ���͡����_���r(sh��)�g���L(zh��ng)�̡�ͨ�^��׃ֱ��늙C(j��)늘���늉��ġ�ռ�ձȡ����_(d��)����׃ƽ��늉���С��Ŀ�ģ��Ķ�������늄�(d��ng)�C(j��)���D(zhu��n)�١�Ҳ����?y��n)���ˣ�PWM�ֱ��Q�顰�_�P(gu��n)�(q��)��(d��ng)�b�á���
��D1��ʾ��
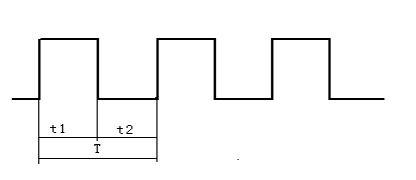
�D1 PWM��̖(h��o)��ռ�ձ�
�O(sh��)늙C(j��)ʼ�K��ͨ�Դ�r(sh��)��늙C(j��)�D(zhu��n)������Vmax���O(sh��)ռ�ձȞ�D= t1 / T���t늙C(j��)��ƽ���ٶȞ�Va = Vmax * D������Vaָ����늙C(j��)��ƽ���ٶȣ�Vmax ��ָ늙C(j��)��ȫͨ늕r(sh��)������ٶȣ�D = t1 / T��ָռ�ձȡ�
������Ĺ�ʽ��Ҋ����(d��ng)�҂���׃ռ�ձ�D=t1/T�r(sh��)���Ϳ��Եõ���ͬ��늙C(j��)ƽ���ٶ�Vd,�Ķ��_(d��)���{(di��o)�ٵ�Ŀ�ġ���(y��n)����f��ƽ���ٶ�Vd�cռ�ձ�D���LJ�(y��n)��ľ����P(gu��n)ϵ��������һ��đ�(y��ng)���У��҂����Ԍ�����ƵĿ����Ǿ����P(gu��n)ϵ��
3. 2 PWM�{(di��o)�ٷ���
���چ�Ƭ�C(j��)���ܛ���팍(sh��)�F(xi��n)PWM����PWM�{(di��o)��ϵ�y(t��ng)��ռ�ձ�D��һ��(g��)��Ҫ����(sh��)���Դ늉� ��׃����r�£�늘ж�늉���ƽ��ֵȡ�Q��ռ�ձ�D�Ĵ�С����׃D��ֵ���Ը�׃늘ж�늉���ƽ��ֵ�Ķ��_(d��)���{(di��o)�ٵ�Ŀ�ġ���׃ռ�ձ�D��ֵ�����N������
��׃����r�£�늘ж�늉���ƽ��ֵȡ�Q��ռ�ձ�D�Ĵ�С����׃D��ֵ���Ը�׃늘ж�늉���ƽ��ֵ�Ķ��_(d��)���{(di��o)�ٵ�Ŀ�ġ���׃ռ�ձ�D��ֵ�����N������
A�������{(di��o)�l�������� ��׃��ֻ��׃t���@��ʹ����(���l��)Ҳ�S֮��׃[��
��׃��ֻ��׃t���@��ʹ����(���l��)Ҳ�S֮��׃[��
B���{(di��o)���{(di��o)�l��������t��׃��ֻ��׃ ���@��ʹ����(���l��)Ҳ�S֮��׃[��
���@��ʹ����(���l��)Ҳ�S֮��׃[��
C�����l�{(di��o)��������������T(���l��)��׃��ͬ�r(sh��)��׃ ��t��
��t��
ǰ�ɷN�������{(di��o)�ٕr(sh��)��׃�˿����}�_������(���l��)����(d��ng)�����}�_���l���cϵ�y(t��ng)�Ĺ����l�ʽӽ��r(sh��)������(hu��)������ʎ����˳����ö��l�{(di��o)��������׃ռ�ձȏĶ���׃ֱ��늄�(d��ng)�C(j��)늘Ѓɶ�늉������Æ�Ƭ�C(j��)�Ķ��r(sh��)Ӌ(j��)��(sh��)�����ܛ���ӕr(sh��)�ȷ�ʽ�팍(sh��)�F(xi��n)�}���������{(di��o)�����˷N��ʽ�ɺ�(ji��n)��Ӳ���·�������ԏ�(qi��ng)�ȃ�(y��u)�c(di��n)��
3.3 PWM��(sh��)�F(xi��n)��ʽ
����һ�����ö��r(sh��)�������}�����ƵĶ��r(sh��)��ʽ���@һ��ʽ�a(ch��n)�����}�_���ȘO�侫�_���`��ֻ�ڎׂ�(g��)us��
������������ܛ���ӕr(sh��)��ʽ���@һ��ʽ�ھ����ϲ�������һ���e���������Д����һ�����`��ʲ��÷���һ��
4ϵ�y(t��ng)Ӳ���O(sh��)Ӌ(j��)
4.1ϵ�y(t��ng)�����M��
4.1.1 Ӳ��ģ�K�M��
��1����Ƭ�C(j��)����ģ�K
��2��L298늙C(j��)�(q��)��(d��ng)ģ�K
��3��LED�@ʾģ�K
��4����(d��)���I�P����ģ�K3.3ϵ�y(t��ng)Ӳ����ģ�K�·
4.1.2 ��Ƭ�C(j��)����(g��)����ģ�K
��Ƭ�C(j��)����(g��)����ģ�K
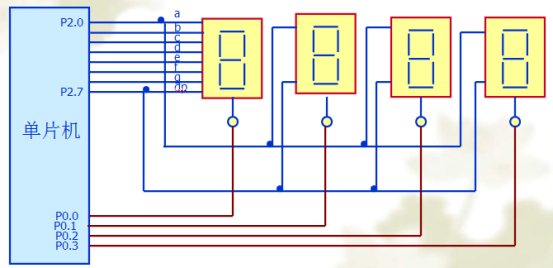
�@�����ö��r(sh��)Ӌ(j��)��(sh��)����Ƭ�C(j��)P2�ڵ�P2.6��P2.7���_ݔ��ռ�ձȲ�ͬ�ķ�����Ȼ��(j��ng)�(q��)��(d��ng)оƬL298�Ŵ�����ֱ��늙C(j��)���(q��)��(d��ng)оƬ��ݔ��늉��ǃ����_��늉�����{(di��o)�ٕr(sh��)һ�����_������ƽ����һ��(g��)���_�a(ch��n)���{(di��o)�ٷ������@�Ӄɂ�(g��)���_��늉���Ϳ�ͨ�^��������һ��(g��)���_�����ơ���(d��ng)��Ҫ��׃늙C(j��)�D(zhu��n)��(d��ng)����r(sh��)���ɂ�(g��)���_��ݔ���෴��
���r(sh��)Ӌ(j��)��(sh��)�����ɕr(sh��)�g��1us���Д�һ�Σ���ʹP2.6��P2.7�a(ch��n)��һ��(g��)���ƽ����ƽ��ֱ��늙C(j��)���ٶȷֳ�100��(g��)�ȼ�(j��)�����һ��(g��)���ھ���100��(g��)�}�_�����ڞ�һ�ق�(g��)�}�_�ĕr(sh��)�g���ٶȵȼ�(j��)��(du��)��(y��ng)һ��(g��)���ڵĸ��ƽ�}�_�Ă�(g��)��(sh��)��ռ�ձȞ���ƽ�}�_��(g��)��(sh��)ռһ��(g��)���ڿ��}�_��(g��)��(sh��)�İٷ�?j��n)?sh��)��һ��(g��)���ڼ���늙C(j��)�ɶ˵�늉����}�_��늉�����ռ�ձȡ�ռ�ձ�Խ����늙C(j��)�ɶ˵�늉�Խ��늙C(j��)�D(zhu��n)��(d��ng)Խ�졣늙C(j��)��ƽ���ٶȵ�����һ����ռ�ձ���늙C(j��)������ٶȳ���ռ�ձȡ���(d��ng)�҂���׃ռ�ձȕr(sh��)���Ϳ��Եõ���ͬ��늙C(j��)ƽ���ٶȣ��Ķ��_(d��)���{(di��o)�ٵ�Ŀ�ġ����_���v��ƽ���ٶ��cռ�ձȲ����LJ�(y��n)��ľ����P(gu��n)ϵ����һ��đ�(y��ng)���У����Ԍ�����ƿ��ɾ����P(gu��n)ϵ��
4��2 AT89S52�ĺ�(ji��n)��
4��2.1 AT89S52��Ҫ����
AT89S52��һ�N���ġ�������CMOS8λ������������8K ��ϵ�y(t��ng)�ɾ���Flash �惦(ch��)����ʹ��Atmel ��˾���ܶȷ���ʧ�Դ惦(ch��)�����g(sh��)���죬�c���I(y��)80C51 �a(ch��n)Ʒָ������_��ȫ���ݡ�Ƭ��Flash���S����惦(ch��)����ϵ�y(t��ng)�ɾ��̣����m�ڳ�Ҏ(gu��)���������چ�оƬ�ϣ������`�ɵ�8 λCPU ����ϵ�y(t��ng)�ɾ���Flash��ʹ��AT89S52�鱊��Ƕ��ʽ���Ƒ�(y��ng)��ϵ�y(t��ng)�ṩ���`�����Ч�Ľ�Q������
�cMCS-51��Ƭ�C(j��)�a(ch��n)Ʒ���ݣ�8K�ֹ�(ji��)��ϵ�y(t��ng)�ɾ���Flash�惦(ch��)����1000�β������ڣ�ȫ�o�B(t��i)������0Hz��33Hz������(j��)���ܳ���惦(ch��)����32��(g��)�ɾ���I/O�ھ�������(g��)16λ���r(sh��)��/Ӌ(j��)��(sh��)�����˂�(g��)�Д�Դ��ȫ�p��UART����ͨ�������Ŀ��e�͵��ģʽ����늺��Д�Ɇ��ѣ����T�����r(sh��)�����p��(sh��)��(j��)ָᘣ���늘�(bi��o)�R(sh��)����
4��2.2 AT89S52��Ҫ�������e
1�������`�ɵ�8λCPU����ϵ�y(t��ng)�ɾ���Flash
2����Ƭ��(n��i)���ߕr(sh��)���ʎ�������y(t��ng)��߹����l�ʿ��� 12MHz��
3����(n��i)������惦(ch��)����ROM���� 8KB
4����(n��i)����(sh��)��(j��)�惦(ch��)����RAM���� 256�ֹ�(ji��)
5��32 ��(g��)�ɾ���I/O �ھ�
6��8 ��(g��)�Д�����Դ
7������(g��) 16 λ���r(sh��)��/Ӌ(j��)��(sh��)��
8������(j��)���ܳ���惦(ch��)��
9��ȫ�p��UART����ͨ��
4��2.3 AT89S52�����_���ܽ�B
4. 3 L298늙C(j��)�(q��)��(d��ng)ģ�K
4. 3.1 L298늙C(j��)�(q��)��(d��ng)��(ji��n)��
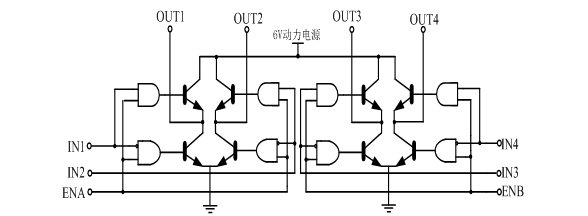
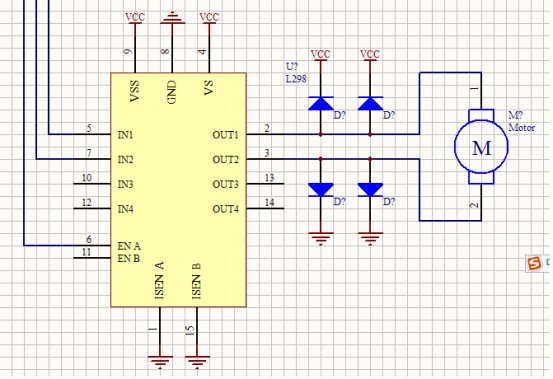
L298��SGS��˾�Įa(ch��n)Ʒ��L298N��15��(g��)�ܽǵĆΉK�����·����늉������������ͨ���(q��)��(d��ng)���O(sh��)Ӌ(j��)��L298N������DTL����TTL߉�ƽ���(q��)��(d��ng)����ؓ(f��)�d(�����^�����ֱ���Ͳ��M(j��n)�R�_(d��))���_�P(gu��n)�Դ���w�ܡ���(n��i)������4ͨ��߉�(q��)��(d��ng)�·�����~����������� 1 A�������_(d��) 1.5 A��Vss 늉���С 4.5 V�������_(d��) 36 V��Vs 늉����ֵҲ�� 36 V��L298N��ֱ�ӌ�(du��)늙C(j��)�M(j��n)�п��ƣ��o횸��x�·�������(q��)��(d��ng)�p늙C(j��)��
4. 3.2 L298��(n��i)����ԭ��D
4. 3.3 L298 ���_��̖(h��o)������
| |
| �քe��ɂ�(g��)H�����������_�����Õr(sh��)����ֱ�ӽӵ� |
| |
| |
| ݔ���ˣ��c��(du��)��(y��ng)ݔ���ͬ߉ |
| |
| 늙C(j��)�(q��)��(d��ng)�Դ����Сֵ���ݔ��ĵ��ƽ늉��� |
| |
4. 3.4 L298��߉����
��(d��ng)ʹ�ܶ˞���ƽ�r(sh��)��ݔ���IN1��PWM��̖(h��o),IN2����ƽ��̖(h��o)�r(sh��),늙C(j��)���D(zhu��n)��ݔ���IN1����ƽ��̖(h��o)��IN2��PWM��̖(h��o)�r(sh��),늙C(j��)���D(zhu��n);;IN1�cIN2�� ͬ�r(sh��),늙C(j��)����ֹͣ����(d��ng)ʹ�ܶ˞���ƽ�r(sh��),늄�(d��ng)�C(j��)ֹͣ�D(zhu��n)��(d��ng)��
�ڌ�(du��)ֱ��늄�(d��ng)�C(j��)늉��Ŀ��ƺ��(q��)��(d��ng)�У��댧(d��o)�w��������(L298)��ʹ���Ͽ��Է֞�ɷN��ʽ�����ԷŴ��(q��)��(d��ng)��ʽ���_�P(gu��n)�(q��)��(d��ng)��ʽ�ھ��ԷŴ��(q��)��(d��ng)��ʽ��
�댧(d��o)�w�������������ھ��ԅ^(q��)��(y��u)�c(di��n)�ǿ���ԭ����(ji��n)�Σ�ݔ������(d��ng)С�����Ժã���(du��)�����·�ɔ_С��ȱ�c(di��n)�鹦�����������ھ��ԅ^(q��)�����ʵͺ�ɢ�ᆖ�}��(y��n)�ء��_�P(gu��n)�(q��)��(d��ng)��ʽ��ʹ�댧(d��o)�w���������������_�P(gu��n)��B(t��i)��ͨ�^�}�{(di��o)�ƣ�PWM��������늄�(d��ng)�C(j��)��늉����Ķ���(sh��)�F(xi��n)늄�(d��ng)�C(j��)�D(zhu��n)�ٵĿ��ơ�
4. 4 LED��(sh��)�a���@ʾ
4. 4.1 LED��(ji��n)��
LED��Light Emitting Diode�����l(f��)����O�ܣ���һ�N�̑B(t��i)�İ댧(d��o)�w������������ֱ�Ӱ���D(zhu��n)����⡣LED�����K��һ��(g��)�댧(d��o)�w�ľ�Ƭ����Ƭ��һ�˸���һ��(g��)֧���ϣ�һ����ؓ(f��)�O����һ���B���Դ�����O��ʹ����(g��)��Ƭ���h(hu��n)����֬���b�������댧(d��o)�w��Ƭ�Ƀɲ��ֽM�ɣ�һ������P�Ͱ댧(d��o)�w�����������Ѩռ����(d��o)��λ����һ����N�Ͱ댧(d��o)�w�����@߅��Ҫ����ӡ����@�ɷN�댧(d��o)�w�B�������ĕr(sh��)������֮�g���γ�һ��(g��)��P-N�Y(ji��)����
������(d��ng)���ͨ�^��(d��o)���������@��(g��)��Ƭ�ĕr(sh��)����Ӿ͕�(hu��)������P�^(q��)����P�^(q��)����Ӹ���Ѩ��(f��)�ϣ�Ȼ��͕�(hu��)�Թ��ӵ���ʽ�l(f��)���������@����LED�l(f��)���ԭ��������IJ��L(zh��ng)Ҳ���ǹ���ɫ�������γ�P-N�Y(ji��)�IJ��ϛQ���ġ��������댧(d��o)�w�������⣬��(d��ng)�������(l��)�r(sh��)�ܰl(f��)���W(xu��)ݗ��İ댧(d��o)�w���O�ܡ���(y��n)����v���g(sh��)�ZLED��(y��ng)ԓ�H��(y��ng)���ڰl(f��)���Ҋ��Ķ��O�ܣ��l(f��)����t��ݗ��Ķ��O�ܽмt��l(f��)����O�ܣ�IRED,Infrared Emitting Diode�����l(f��)���ֵ���L(zh��ng)�ڿ�Ҋ��̲��������ɲ�������ݗ��Ķ��O�ܷQ������l(f��)����O�ܣ�������(x��)�T�ϰ��������N�댧(d��o)�w���O�ܽy(t��ng)�Q��l(f��)����O�ܡ�
4. 4.2 LED�߶Δ�(sh��)�a�ܵĽY(ji��)��(g��u)
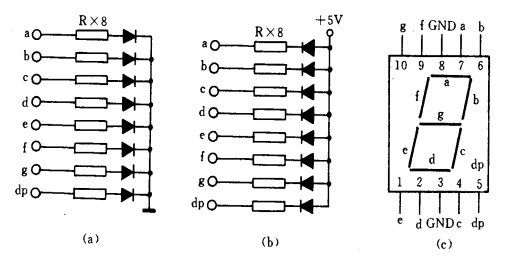
��ꎘO ��ꖘO ���_�D
���У��D��a���鹲ꎘO�Y(ji��)��(g��u)��8��l(f��)����O�ܵ�ꎘO���B����һ��ꖘO�˷��_���ƣ�ʹ�Õr(sh��)�����˽ӵأ�Ҫʹ�ĸ��l(f��)����O�ܣ��t��(du��)��(y��ng)��ꖘO�˽Ӹ��ƽ���D��b���鹲ꖘO�Y(ji��)��(g��u)��8�˰l(f��)����O�ܵ�ꖘO���B����һ��ꎘO�˷��_���ƣ�ʹ�Õr(sh��)�����˽��Դ��Ҫʹ�ĸ��l(f��)����O�ܣ��t��(du��)��(y��ng)��ꎘO�˽ӵء�����7�ΰl(f��)����O�ܘ�(g��u)��7�P�����Ρ�8��,1���l(f��)����O�ܘ�(g��u)��С��(sh��)�c(di��n)���D��c�������_�D����a-g���_ݔ�벻ͬ��8λ���M(j��n)�ƾ��a�����@ʾ��ͬ�Ĕ�(sh��)�ֻ��ַ���ͨ���ѿ��ưl(f��)����O�ܵ�7����8��λ���O�ܾ��ƷQ���ֶδa����ͬ��(sh��)�ֻ��ַ����ֶδa��һ�ӣ���(du��)��ͬһ��(g��)��(sh��)�ֻ��ַ�����ꎘO�B�Ӻ�ꖘO�B�ӵ��ֶδaҲ��һ�ӣ���ꎘO��ꖘO���ֶδa���鷴�a��
4. 4.3��Ҋ��(sh��)�ֺ��ַ����ֶδa
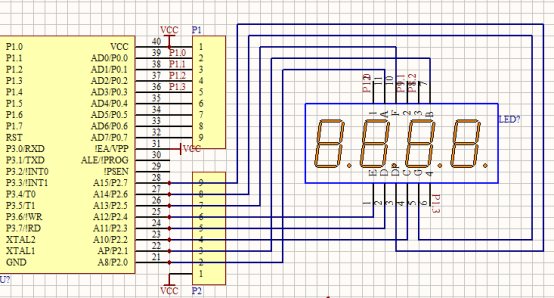
4. 4.4 LED��(sh��)�a�ܺ͆�Ƭ�C(j��)���B��
�·�Ľӷ��Q���˱�횲�����λ�����@ʾ��ʽ�����Ķ��x���ͳ�ijλLED�����ʹa��Ȼ���xͨԓλLED�� ������һ���ӕr(sh��)�r(sh��)�g��Ȼ���xͨ��һλ��ֱ������λ�� ���ꡣ
4. 4.5��(ji��n)�εij�������
4. 4.6��ϵ�y(t��ng)�І�Ƭ�C(j��)�cLED���B��
4.5��(d��)��ʽ�I�P����ģ�K
4.5.1�I�P�Ĺ��ܼ����
�I�P��һ�N��õ�ݔ���O(sh��)��,����һ�M���I�ļ��ϣ��Ĺ����Ͽɷ֞锵(sh��)���I�����I�ɷN��������ݔ�딵(sh��)��(j��)�c�����ԃ�Ϳ���ϵ�y(t��ng)�Ĺ�����B(t��i)����(sh��)�F(xi��n)��(ji��n)�ε��˙C(j��)��(du��)Ԓ��
�I�P�ķ��
��a���I�P���սӿ�ԭ���ɷ֞龎�a�I�P�c�Ǿ��a�I�P����@����I�P����Ҫ�^(q��)�e���R(sh��)�e�I�����o������(y��ng)�I�a�ķ�����
���a�I�P��Ҫ����Ӳ���팍(sh��)�F(xi��n)��(du��)�I���R(sh��)�e��
�Ǿ��a�I�P��Ҫ����ܛ���팍(sh��)�F(xi��n)�I�P�Ķ��x�c�R(sh��)�e��
��b���I�P������Y(ji��)��(g��u)�ɷ֞骚(d��)��ʽ�I�P�c���ʽ�I�P���
��(d��)��ʽ�I�P��Ҫ���ڰ��I�^�ٵĈ�(ch��ng)��,���ʽ�I�P��Ҫ���ڰ��I�^��Ĉ�(ch��ng)�ϣ�Ҳ�Q����ʽ�I�P
4.5.2��(d��)��ʽ�I�P
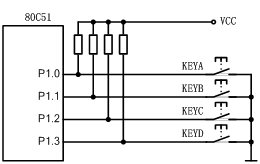
��(d��)��ʽ�I�P�İ��I���(d��)����ÿ��(g��)���I��һ��I/O�ھ���һ��I/O�ھ��ϵİ��I������B(t��i)����(hu��)Ӱ�����I/O�ھ��Ĺ�����B(t��i)����ˣ�ͨ�^�z�y(c��)I/O�ھ����ƽ��B(t��i)�������Д��I�P���Ă�(g��)�I������
4.5.3��(d��)��ʽ�I�P�c��Ƭ�C(j��)��朽�
5ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)
ֱ�ӑ�(y��ng)��AT89S52��ܛ��������(sh��)�F(xi��n)PWM��̖(h��o)ݔ�����@��Ӳ����(sh��)�F(xi��n)PWM��̖(h��o)�ɱ��͡������١���(sh��)�F(xi��n)��ݡ������̈D������ʾ��
5.1���̈D
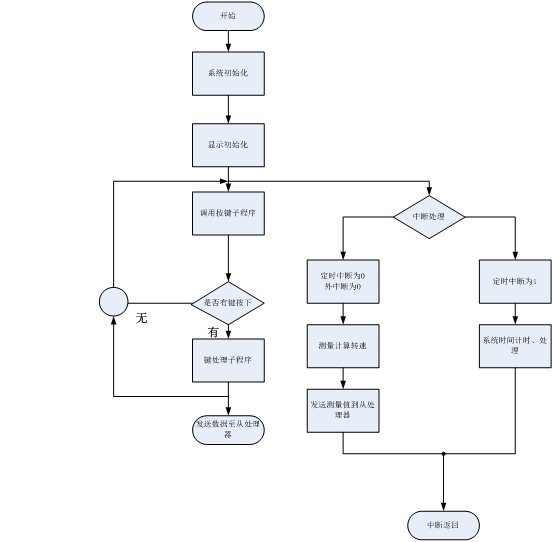
5.1.1���������̈D
�D5.1ϵ�y(t��ng)����Ƭ�C(j��)�������D
�Y(ji��)Փ
ͨ�^���ή��I(y��)�O(sh��)Ӌ(j��)��ʹ�ҌW(xu��)�����S�������ϟo���W(xu��)����֪�R(sh��),Ҳʹ������w��(hu��)����Ƭ�C(j��)���g(sh��)��(y��ng)���I(l��ng)��ďV�������H�Ҍ�(du��)�W(xu��)�^�Ć�Ƭ�C(j��)֪�R(sh��)���˺ܶ��얹̣�ͬ�r(sh��)Ҳ��(du��)��Ƭ�C(j��)�@һ�T�n�̮a(ch��n)���˸�����dȤ���ڱ����n���O(sh��)Ӌ(j��)�^���У��ҌW(xu��)��(hu��)���ھW(w��ng)�j(lu��)�ϲ������P(gu��n)���O(sh��)Ӌ(j��)�ĸ�Ӳ�����YԴ�����а�����ֱ��늙C(j��)PWM�{(di��o)�١�AT89S52��Ƭ�C(j��)��L289���_�D�������_���ܵȣ�LED��(sh��)�a���@ʾ���鱾�ή��I(y��)�O(sh��)Ӌ(j��)�ṩ��һ�����Y�ϡ�
�������I(y��)�O(sh��)Ӌ(j��)�ij����A�Σ��y�Ⱥܴ]���^�w��ͨ�^��������ώ���������˼·��ͬ�r(sh��)���ڈD���^��W(w��ng)�ϲ���Y�ϣ������ˮ��I(y��)�O(sh��)Ӌ(j��)�еĵ����y�}��ͨ�^���οƼ���(chu��ng)��(sh��)�`���ҌW(xu��)�����S���|����֪���⿿�����ϵĖ|���Dz���ģ����~��ȥ���Y�ϡ��oՓ����Ӳ��߀��ܛ���O(sh��)Ӌ(j��)�ϣ��Ҷ������˲��ٵĆ��}���ڿ˷����y���^���У��ҌW(xu��)�����S�࣬�e�����n���όW(xu��)�����Ė|���磨PWM����Ҳ呟����ҵ�protel���D��������ǰ�W(xu��)�ĕr(sh��)��Ԫ�������ǽo����ֻҪ���������ҳ����־Ϳ��ԣ�ֻҪ�B���Ϳ��ԣ����@���Ǹ���(j��)�Լ����O(sh��)Ӌ(j��)��Ҫȥ�������X��ͬ�������O(sh��)Ӌ(j��)���ܪ�(d��)����ɣ��������˺ܴ���ի@�����ĸ����������棺
1��ͨ�^���ή��I(y��)�O(sh��)Ӌ(j��)���Ҳ�����(du��)��Ƭ�C(j��)���˸���������˽⣬��(du��)һ��(g��)�n�}��ή����̈D�������������һ�����J(r��n)�R(sh��)��
2���M(j��n)һ���ӏ�(qi��ng)���ҵĄ�(d��ng)���������\(y��n)�Ì��I(y��)֪�R(sh��)�����������ЌW(xu��)��(x��)�����ȥ˼���ͽ�Q���}���Լ�����`��ظ�׃����ȥ��(sh��)�F(xi��n)�O(sh��)Ӌ(j��)�������e������w��(hu��)����ܛ����Ӳ���Y(ji��)�ϵ���Ҫ�ԣ��Լ����ߵ�(li��n)ϵ��������á�
3�����˽��Ƭ�C(j��)���g(sh��)��(du��)��(d��ng)���˂��������Ҫ�ԡ�ͬ�r(sh��)�@�������I(y��)�O(sh��)Ӌ(j��)�Ľ�(j��ng)�vҲʹ������˜\����֪�����κ����鶼��(y��ng)�_̤��(sh��)�أ��̿�Ŭ����ȥ����ֻ���@�ӣ��������á�
���2��ԭ��D
��Ƭ�C(j��)Դ��������:
- *********************************************************************
- ֱ��늙C(j��)PWM�{(di��o)��
- ����������ʹ�Æ�Ƭ�C(j��)T0���r(sh��)���a(ch��n)��(xxxHz)�}���{(di��o)����̖(h��o)��ݔ?sh��)�L298N��EN_A
- ��(sh��)�F(xi��n)�pֱ��늙C(j��)���ٶ��{(di��o)�ء�
- ��ӆ���ڣ�2011-5-7
- *********************************************************************/
- #include<reg52.h>
- #include<intrins.h>
- #define uchar unsigned char
- #define uint unsigned int
-
- /**********************************************************************
- L298n�ӿڶ��x
- **********************************************************************/
- sbit MOTOR_A_2=P3^6;
- sbit MOTOR_A_1=P3^7;
- sbit EN_MOTOR_A =P3^4;
- sbit k1=P1^5; //���xk1��p1.5��
- sbit k2=P3^1; //���xk2��p3.1��
- sbit k3=P3^2; //���xk3��p3.2��
- sbit k4=P3^3; //���xk4��p3.3��
- uchar T=0; //���r(sh��)��(bi��o)ӛ
- uchar W=0; //�}��ֵ 0~100
- uchar A=0; //�����(bi��o)ӛ 0��1
- uchar k=0; //���I��(bi��o)ӛ
- uchar i=0; //Ӌ(j��)��(sh��)׃��
-
-
- uchar code table1[]={
- 0x3f,0x06,0x5b,0x4f,
- 0x66,0x6d,0x7d,0x07,
- 0x7f,0x6f,0x77,0x7c,
- 0x39,0x5e,0x79,0x71};
-
- uchar code table2[]={0xef,0xbf,0xdf,0x7f};
-
- void delayms(uint t);
- /**********************************************************************
- ��(sh��)�a���@ʾ
- **********************************************************************/
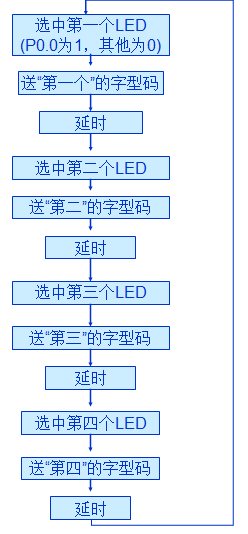
- void disp(void)
- {
- P0=table2[3];
- P2=table1[W%10]; //�@ʾռ�ձȂ�(g��)λ
- delayms(1); //�ӕr(sh��)1ms
- P0=0xff; //P0��1
-
- P0=table2[2];
- P2=table1[W/100]; //�@ʾռ�ձȰ�λ
- delayms(1); //�ӕr(sh��)1ms
- P0=0xff; //P0��1
-
- P0=table2[1];
- P2=table1[W/10%10]; //�@ʾռ�ձ�ʮλ
- delayms(1); //�ӕr(sh��)1ms
- P0=0xff; //P0��1
-
- P0=table2[0];
- P2=table1[A]; //�@ʾ����
- delayms(1); //�ӕr(sh��)1ms
- P0=0xff; //P0��1
- }
-
- /**********************************************************************
- ���r(sh��)��׃�����x
- **********************************************************************/
-
-
- void init(void)
- {
- //����(d��ng)��
- TMOD=0x01;
- EA=1;
- ET0=1;
- TR0=1;
- //�O(sh��)�ö��r(sh��)�r(sh��)�g
- TH0=0xfd;
- TL0=0x17;
- }
-
- void timer0() interrupt 1
- {
- //���ö��r(sh��)���r(sh��)�g
- TL0=0x17;
- TH0=0xff;
- T++; //���r(sh��)��(bi��o)ӛ��1
- disp(); //��(sh��)�a���@ʾ
- if(T>W)
- EN_MOTOR_A =1;
- else
- EN_MOTOR_A =0;
- if(T==100)
- T=0;
-
- }
- /**********************************************************************
- �ӕr(sh��)1ms
- **********************************************************************/
- void delayms(uint t)
- {
- uchar j;
- while(t--)
- {
- for(j=0;j<250;j++) //ѭ�h(hu��n)250��
- {
- _nop_(); //ϵ�y(t��ng)�ӕr(sh��)
- _nop_(); //ϵ�y(t��ng)�ӕr(sh��)
- _nop_(); //ϵ�y(t��ng)�ӕr(sh��)
- _nop_(); //ϵ�y(t��ng)�ӕr(sh��)
- }
- }
- }
- /**********************************************************************
- ��(d��)�����I�z�y(c��)
- **********************************************************************/
- void key(void) //���I�����
- {
- if(k1==0) //���I1����
- {
- while(k1==0); //���I1̧��
- if(W==100) //����}����100
- W=0; //�}����0
- else
- W+=1; //��t��1
- }
- else if(k2==0) //���I2����
- {
- while(k2==0); //���I2̧��
- if(W==0) //����}����0
- W=100; //�}���O(sh��)�ó�100
- else
- W-=1; //��t�p1
- }
- else if(k3==0) //���I3����
- {
- while(k3==0); //���I3̧��
- A=!A; //�����(bi��o)ӛȡ��
- k=0; //���I��(bi��o)ӛ��0
- ����������������
- �����������ڱ���ƪ�� ���´��aՈ(q��ng)��51�����d������������
�����Y��51hei�ṩ���d:
����: ZZAKI �r(sh��)�g: 2019-4-25 01:08
���x��������
����: 2038507077 �r(sh��)�g: 2019-6-24 15:52
���x������֧��
����: yxrnzzz �r(sh��)�g: 2019-9-24 13:43
xx�x�x����


����: ls147258 �r(sh��)�g: 2019-11-28 15:26
�ܺã��W(xu��)��(x��)�ˡ��dz�����
����: tlzyytc �r(sh��)�g: 2019-11-28 19:30
���x������֧��
����: bydqcdz �r(sh��)�g: 2019-11-28 20:02
�dz�Ԕ��(x��)�����x
����: llk123 �r(sh��)�g: 2019-12-5 14:28
���x����
����: rabitzhang �r(sh��)�g: 2019-12-15 20:02
�x�x������������
����: rabitzhang �r(sh��)�g: 2019-12-15 20:05
�x�x��������
����: Ada1540627258 �r(sh��)�g: 2019-12-23 20:00
�dz����x
����: Ada1540627258 �r(sh��)�g: 2019-12-24 10:10
�кܴ�Ď��� �x�x
����: lindeijun1 �r(sh��)�g: 2020-2-17 18:38
�x�x��������������
����: zhang1109408530 �r(sh��)�g: 2020-3-1 14:26
��ϲ�g�@��(g��)����
����: �R��� �r(sh��)�g: 2020-3-22 18:41
���������놖һ�£���ʲô����r(sh��)����(d��)�����I�r(sh��)����(sh��)�a�ܛ]���D(zhu��n)���@ʾ�أ�
����: �R��� �r(sh��)�g: 2020-3-22 18:44
�������� ���Ђ�(g��)���}��Ո(q��ng)����
��hex�ļ���(d��o)��֮�� ����(d��)�����I�ٶȼ�1 �ڲ��BӲ������r�� ��(sh��)�a�ܕ�(hu��)���ٶ��@ʾ��
����: xzyr121 �r(sh��)�g: 2020-4-29 14:51
���x��������
����: xzyr121 �r(sh��)�g: 2020-4-29 14:53
���������놖һ�£���ʲô����r(sh��)����(d��)�����I�r(sh��)����(sh��)�a�ܛ]���D(zhu��n)���@ʾ�أ�
����: xzyr121 �r(sh��)�g: 2020-4-29 14:54
��ϲ�g�@��(g��)����
����: ���S �r(sh��)�g: 2020-5-1 18:33
�x�x����
����: qqzwsx �r(sh��)�g: 2020-5-17 17:15
���x��������
����: ��Ƭ�C(j��)֮· �r(sh��)�g: 2020-6-4 18:52
�������^��ʮ��Ԕ��(x��)���dz��Ў������x�x��
����: lmx00513 �r(sh��)�g: 2020-6-6 11:58
�x�x����
| �gӭ���R (http://www.raoushi.com/bbs/) |
Powered by Discuz! X3.1 |



 ��Ƭ�C(j��)ֱ��늙C(j��)PWM����ϵ�y(t��ng).rar
(498.4 KB, ���d��(sh��): 699)
��Ƭ�C(j��)ֱ��늙C(j��)PWM����ϵ�y(t��ng).rar
(498.4 KB, ���d��(sh��): 699)