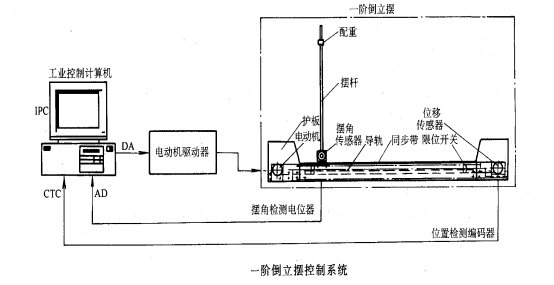
 �ں����˿՚�����(d��ng)�������Լ����NĦ��֮�Ɍ������[ϵ�y(t��ng)�����С܇�̈́��|(zh��)�U�M�ɵ�ϵ�y(t��ng)�����D��ʾ�����У�
�ں����˿՚�����(d��ng)�������Լ����NĦ��֮�Ɍ������[ϵ�y(t��ng)�����С܇�̈́��|(zh��)�U�M�ɵ�ϵ�y(t��ng)�����D��ʾ�����У�
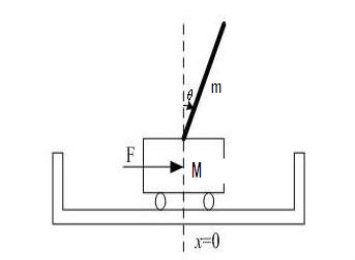
M��С܇�|(zh��)��
m����[�U�|(zh��)��
J����[�U�T��
F������С܇�ϵ���
x��С܇λ��
�ȣ��[�U�c��ֱ���Ϸ���ĊA��
l ���[�U�D(zhu��n)��(d��ng)�S�ĵ��U�|(zh��)�ĵ��L��
����(j��)ţ�D�\(y��n)��(d��ng)�����Լ����w�\(y��n)��(d��ng)Ҏ(gu��)�ɣ���֪��
![]()
��
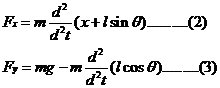
��3��С܇ˮƽ�����ϵ��\(y��n)��(d��ng)��
![]()
(li��n)������4��(g��)���̣����Եó�
һ�A�������_��ģ�ͣ�
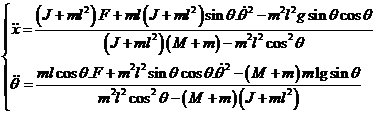
ʽ��J��[�U���D(zhu��n)��(d��ng)�T����![]()
��ֻ���]�����乤���c(di��n)������0=0������![]() ���ļ�(x��)׃�����t���Խ����J(r��n)�飺
���ļ�(x��)׃�����t���Խ����J(r��n)�飺
![]()

��ȡС܇�|(zh��)��M=2kg,�[�U�|(zh��)��m=1kg,�[�U�L��2l =1m,�������ٶ�ȡg=![]() ,�t���Ե�
,�t���Ե�
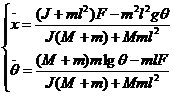
 һ�A�����[����ģ�ͣ�
һ�A�����[����ģ�ͣ�
![]()
 ����׃�Q
����׃�Q
�� G1(s)= ![]() ; G2(s)=
; G2(s)= ![]()
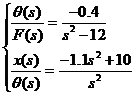
һ�A�����[�h(hu��n)��(ji��)���}��Q��
�x���ձ�����늹�MSMA021��С�T�������ŷ�늄�(d��ng)�C(j��)�������P(gu��n)����(sh��)���£�
�(q��)��(d��ng)늉���U=0~100V �~�����ʣ�PN=200W
�~���D(zhu��n)�٣�n=3000r/min �D(zhu��n)��(d��ng)�T����J=3��10-6kg.m2
�~���D(zhu��n)�أ�TN=0.64Nm ����D(zhu��n)�أ�TM=1.91Nm
늴ŕr(sh��)�g����(sh��)��Tl=0.001s 늙C(j��)�r(sh��)�g����(sh��)��TM=0.003s
��(j��ng)����(d��ng)�C(j��)��(g��u)׃�ٺ�ݔ�����τ�(d��ng)���飺F=0~16N���c�������(q��)��(d��ng)���飺MSDA021A1A������늉���UDA=0~��10V��
������늄�(d��ng)�C(j��)�Ŀ��d�D(zhu��n)�غ�ϵ�y(t��ng)Ħ�����Ϳ����J(r��n)���(q��)��(d��ng)���͙C(j��)е����(d��ng)�b�þ��鼃�����h(hu��n)��(ji��)�������O(sh��)�@�ɂ�(g��)�h(hu��n)��(ji��)������քe��Kd��Km��
![]()
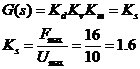
��D3(s)=1.6
늄�(d��ng)�C(j��)�(q��)��(d��ng)�����ֆ��}��Q��
3.�p�]�h(hu��n)PID�������O(sh��)Ӌ(j��)
ʣ�µĆ��}������δ_��������![]() �ĽY(ji��)��(g��u)�ͅ���(sh��)��
�ĽY(ji��)��(g��u)�ͅ���(sh��)��
��һ����(n��i)�h(hu��n)���������O(sh��)Ӌ(j��)

���У�Ks=1.6���ŷ�늄�(d��ng)�C(j��)�c�p�ٙC(j��)��(g��u)�ĵ�Чģ��
1.���������x��
���ڃ�(n��i)�h(hu��n)����������D2(s)����PD��PI��PID���N���ܵĽY(ji��)��(g��u)��ʽ����ô�xȡ�أ��@����������L�Ƹ��N�������Y(ji��)��(g��u)�¡�ϵ�y(t��ng)��܉�E�����k�����Է������^����֮�x��һ�N���^�m�ϵĿ������Y(ji��)��(g��u)��
���N���������_�h(hu��n)�����Ă��f����(sh��)�քe�飺
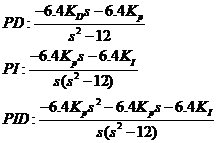


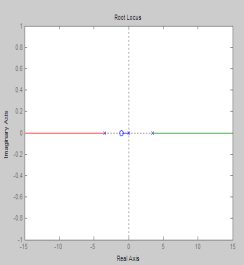
�ĸ�܉�E���y�l(f��)�F(xi��n)������PD�Y(ji��)��(g��u)�ķ������������Y(ji��)��(g��u)�����ҿɱ��C�]�h(hu��n)ϵ�y(t��ng)�ķ�(w��n)�������ԣ��x�������������ĽY(ji��)��(g��u)��PD��ʽ�Ŀ�������
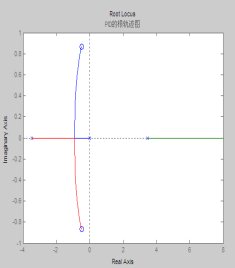
2.����������(sh��)���x��
���ȕ���K=-20���@�ӿ��������(n��i)�h(hu��n)�Ă��f����(sh��)�飺
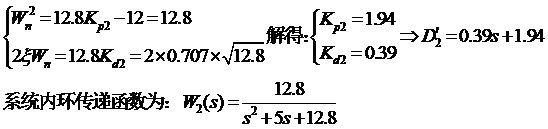
עጣ������ϳ��������![]() =0.707������Aϵ�y(t��ng)�(y��u)�⣡
=0.707������Aϵ�y(t��ng)�(y��u)�⣡
3.ϵ�y(t��ng)��(n��i)�h(hu��n)��simulink���漰�Y(ji��)��

����Y(ji��)���飺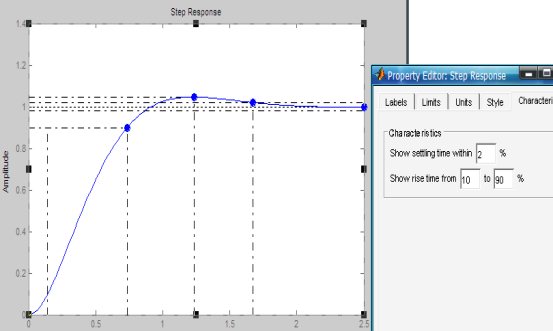
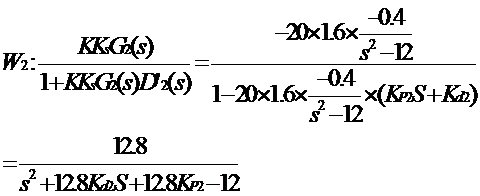
��������h(hu��n)���������O(sh��)Ӌ(j��)

��Ҋ��ϵ�y(t��ng)�_�h(hu��n)���f����(sh��)��ҕ��һ��(g��)���A��4�A����?gu��)��в���(w��n)�����c(di��n)�ġ�����С��λϵ�y(t��ng)�������˱����O(sh��)Ӌ(j��)����Ҫ���Ȍ�ϵ�y(t��ng)�M(j��n)��һЩ����̎������t���������ý�(j��ng)�������Փ�c���������M(j��n)���O(sh��)Ӌ(j��)����
��.ϵ�y(t��ng)��h(hu��n)ģ�͵Ľ��A
��1������(n��i)�h(hu��n)��Ч�]�h(hu��n)���f����(sh��)�Ľ���̎��
![]()
���ߴ��(xi��ng)![]() ���ԣ���
���ԣ���
![]()
���Ɨl�������l�����Ԍ�(d��o)������
![]()
�ɣ�2���ã�![]()
![]()
![]()
![]()
![]()
�ɣ�3���ã�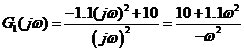
�ɣ�4���ã�![]()
![]() �����ԣ���
�����ԣ���![]()
![]()
���Ɨl���飺![]()
��.�������O(sh��)Ӌ(j��)
�O(sh��)������{(di��o)��(ji��)���� ![]() ��ͬ�r(sh��)����ʹϵ�y(t��ng)���^�õĸ��S���ܣ����Æ�λ����
��ͬ�r(sh��)����ʹϵ�y(t��ng)���^�õĸ��S���ܣ����Æ�λ����![]() �혋(g��u)����h(hu��n)����ͨ������D��ʾ��
�혋(g��u)����h(hu��n)����ͨ������D��ʾ��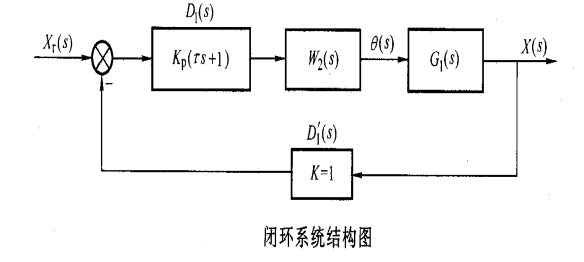
![]()
ȡ![]()

![]()
![]()
![]()
���ɡ����͢��͡�ϵ�y(t��ng)Bode�D���ԣ� ![]() ��֪��
��֪��
![]()
![]()
��.��simulink��С܇��λ�����A�S��̖ݔ���µ�푑�(y��ng)�M(j��n)�з��棺
ϵ�y(t��ng)��D��
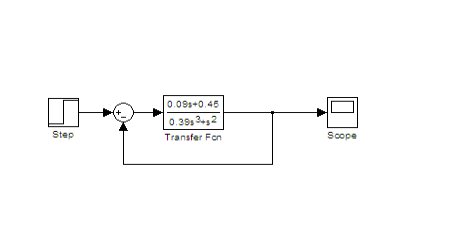
����Y(ji��)����
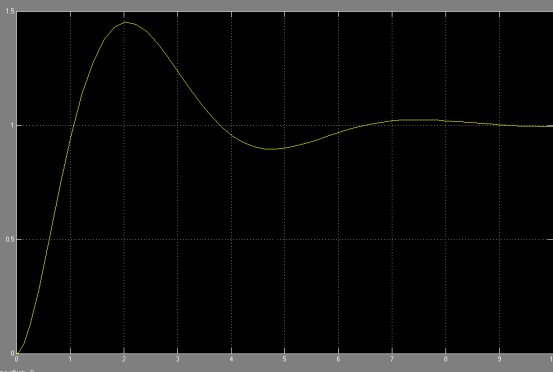
�����[λ�����A�S��̖�µ�푑�(y��ng)
3.ϵ�y(t��ng)��simulink����
�B�ӈD���£�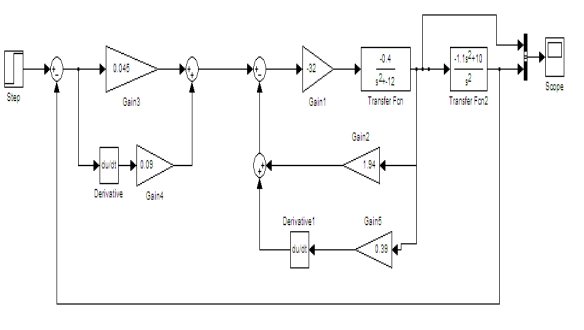
����Y(ji��)���飺
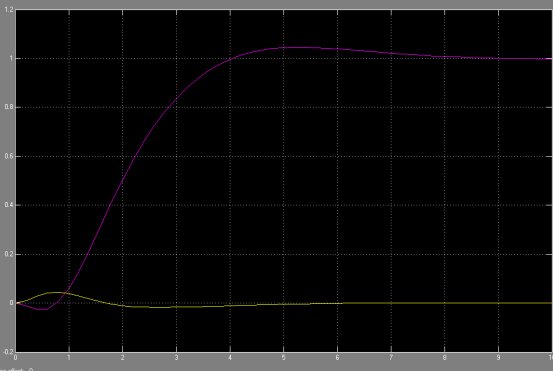
�����[���A�S��̖�[�U��С܇λ�õ�푑�(y��ng)
�����M(j��n)һ���(y��n)�C�ڲ�ͬ�[�U�µģ�ԓһ�A�����[����ϵ�y(t��ng)�Ƿ�߀�����������ԣ��քeȡ�[�U��ͬ���|(zh��)���͔[�L���M(j��n)��simulink���棡
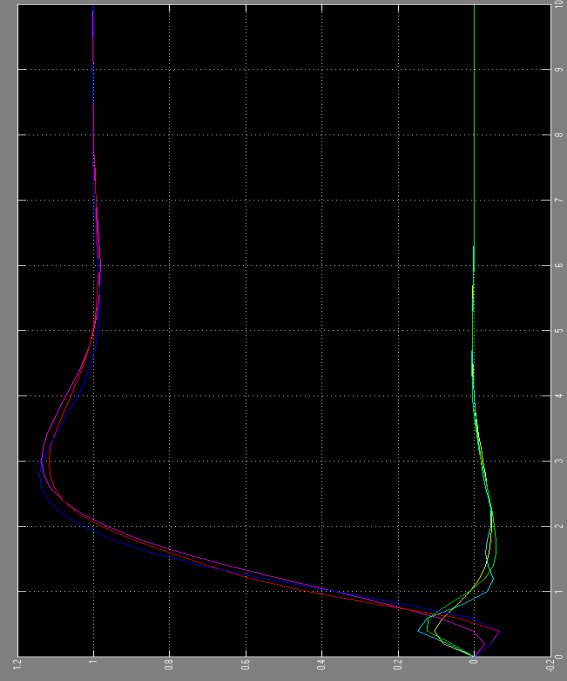
�ɈD��֪��������һ�A�����[ģ���ڲ�ͬ�[�L���܌�(sh��)�F(xi��n)Ҫ���[�L�����^�L��ͬ����������һ�A�����[ģ���ڲ�ͬ�|(zh��)���Ĕ[�U����Ҳ��(sh��)�F(xi��n)Ҫ��ͬ�Ӳ����^�أ�
�塢�n���O(sh��)Ӌ(j��)�ĵ�
1��ͨ�^��(sh��)�(y��n)�˽���һ�A�����[�ǵķǾ��ԡ����_���ԡ�����(w��n)��ϵ�y(t��ng)�ͼs������,ͬ�r(sh��)�����[Ҳ�ǽ�(j��ng)�������о����^��ͬ���Ʒ����ĵ������ӡ�
2����һ�A�����[����ϵ�y(t��ng)���о�ʹ���˽�����[߀�ж��A�����[�����A�����[���������A�����[��ͬ�r(sh��)߀�漰����[�Ć��}���������˵����[�о����dȤ��
3��������һ�A�����[����ϵ�y(t��ng)�������S�����أ���(y��ng)��һЩ����̎������������ֻ��һ�A�����[����ϵ�y(t��ng)�ĺ���ģ�͡���(d��ng)�[�U���|(zh��)���͔[�L���^һ��������ϵ�y(t��ng)ʧЧ,����ԓϵ�y(t��ng)�д����M(j��n)��
������Word��ʽ�ęn51�����d��ַ��
 һ�������[����ϵ�y(t��ng)�O(sh��)Ӌ(j��).doc
(511 KB, ���d��(sh��): 60)
һ�������[����ϵ�y(t��ng)�O(sh��)Ӌ(j��).doc
(511 KB, ���d��(sh��): 60)
| �gӭ���R (http://www.raoushi.com/bbs/) | Powered by Discuz! X3.1 |