
�ڇ�(gu��)��(j��ng)��(j��)�����T����������������C(j��)е��ұ���r(n��ng)�I(y��)���t(y��)�W(xu��)�Լ��˂����ճ������У��ضȲɼ���ʮ����Ҫ�ġ����S��ģ�M�����ƺͱO(ji��n)ҕ��(y��ng)���У��ضȜy(c��)��ͨ���ǻ��� -55�桫125��ضȷ�����(n��i)�đ�(y��ng)�ã���h(hu��n)���O(ji��n)�y(c��)���߲˴���Z�졢���ż��˜ض��a(b��)�����O(sh��)���\(y��n)�еĿɿ��Եȑ�(y��ng)�á���(sh��)�r(sh��)�ɼ��ض���Ϣ�����r(sh��)�l(f��)�F(xi��n)���ڹ��ϣ�����ȡ����(y��ng)��̎����ʩ����(du��)�_���O(sh��)�������\(y��n)�о�����Ҫ���x��
���Ľ�B��һ��(g��)����AVR��Ƭ�C(j��)�Ĝضȿ���ϵ�y(t��ng)��ԓϵ�y(t��ng)���Է���،�(sh��)�F(xi��n)�ضȲɼ����ض��@ʾ�ȹ��ܡ���ϵ�y(t��ng)�Ĝضȿ��Ʋ��ֲ���ATmega16��Ƭ�C(j��)��ɡ�ԓ��Ƭ�C(j��)�����w�eС�����ĵ͡�����(qi��ng)�����܃r(ji��)��ȸߡ�ʹ�����Ԫ���^�١���(n��i)���侀�١������{(di��o)ԇ������@����(y��u)�c(di��n)���������ڜضșz�y(c��)�Ϳ���ϵ�y(t��ng)�пɴ�����߿����|(zh��)�����Ԅ�(d��ng)��ˮƽ���������õĽ�(j��ng)��(j��)Ч����ƏV�r(ji��)ֵ�����Æ�Ƭ�C(j��)��(du��)�ض��M(j��n)�Мy(c��)�صļ��g(sh��)������õ��V����(y��ng)�á�
�ڱ���Ĝضȿ���ϵ�y(t��ng)�У��y(c��)��Ԫ�������x�ß�����衢�댧(d��o)�w�y(c��)�ض��O�ܡ����O�ܡ����ɜضȂ������ȡ���ȶ��ԣ����ɜضȂ��������о��Ժá���(w��n)���ȸߡ����Q�ԏ�(qi��ng)����̎����ͻ����(y��u)�c(di��n)�������S����(ch��ng)���õ��ˏV����(y��ng)�á���ϵ�y(t��ng)�І�Ƭ�C(j��)������λ�C(j��)����ɜy(c��)���΄�(w��)�����Ȿϵ�y(t��ng)߀�����B������(y��ng)������ӟ��·����(d��ng)�h(hu��n)���ضȵ����O(sh��)�����ޜضȕr(sh��)����Ƭ�C(j��)�l(f��)����ָ��ӟ�������(d��ng)��(du��)�h(hu��n)���M(j��n)�мӟᣬ��(d��ng)�ضȻ��������ޜضȕr(sh��)�ӟ���ֹͣ�ӟᡣ
ϵ�y(t��ng)ܛ����Ҫ�ɳ�ʼ�����������O(ji��n)���@ʾ����ȽM�ɡ����г�ʼ�������nj�(du��)��Ƭ�C(j��)�Ľӿڹ�����ʽ��A/D�D(zhu��n)�Q��ʽ���M(j��n)���O(sh��)�ã��@ʾ���������(du��)�@ʾģ�K�ij�ʼ�����@ʾ��ʽ�O(sh��)����ݔ���@ʾ��������t��Ɍ�(du��)�ɼ���(sh��)��(j��)�M(j��n)��̎����
ԓϵ�y(t��ng)��(y��ng)�÷����ஔ(d��ng)�V����ͬ�r(sh��)���Æ�Ƭ�C(j��)���g(sh��)�� ���چ�Ƭ�C(j��)��������(qi��ng)�����ϵ�y(t��ng)�O(sh��)Ӌ(j��)��(ji��n)�Σ������ɿ������ɔ_������(qi��ng)��Ҳ���ڴ˻��A(ch��)�ϼ���ͨ�Žӿ��·����(sh��)�F(xi��n)�c��λ�C(j��)֮�g��ͨ�š�
Ŀǰ���S���F(xi��n)����Ϣ���g(sh��)���w�ٰl(f��)չ���ضȜy(c��)���ɼ�ϵ�y(t��ng)�ڹ��I(y��)���r(n��ng)�I(y��)���˂����ճ������а�����һ��(g��)Խ��Խ��Ҫ�Ľ�ɫ������(du��)�˂���������кܴ��Ӱ푣����ԜضȲɼ�ϵ�y(t��ng)���O(sh��)Ӌ(j��)�c�о���ʮ����Ҫ�����x��
�κ�һ��(g��)���w���߭h(hu��n)��������ضȌ��ԣ�ֻ�Ќ�(du��)��ض��M(j��n)�вɼ������ܸ��õ��˽����w���߭h(hu��n)�������c(di��n)�������@�͏�(qi��ng)�{(di��o)�˜ضȲɼ�����Ҫ�ԡ��ڹ��I(y��)�l(f��)չ���ڣ��˂�ͨ�^���N��(ji��n)�εĹ��߁��ɼ��ضȣ������ض�Ӌ(j��)�ȣ����@�N�ɼ���ʽҲ�������S���©����������(sh��)��(j��)�����_�Ͳ��ܼ��r(sh��)�÷�ӳ�ضȵĔ�(sh��)��(j��)������S�����I(y��)���g(sh��)��Ѹ�Ͱl(f��)չ���������͆�Ƭ�C(j��)���g(sh��)�ij��F(xi��n)��׃�˜ضȲɼ�ϵ�y(t��ng)�ķ�ʽ���ضȲɼ�ϵ�y(t��ng)Ҳ�õ����L(zh��ng)����M(j��n)�����ѽ�(j��ng)׃�Ô�(sh��)�ֻ�����ӻ����F(xi��n)���ڹ��I(y��)��ͨ�^��(sh��)�ֻ��ĜضȲɼ�ģ�K���ضȿ���Ѹ�ٵ�ͨ�^��Ƭ�C(j��)�M(j��n)��̎��������ݔ?sh��)�PC�C(j��)�У��Á��M(j��n)���M(j��n)һ����̎����
���I(y��)�O(sh��)Ӌ(j��)��(qi��ng)�{(di��o)�C�ϑ�(y��ng)�����W(xu��)֪�R(sh��)������呟��c���B(y��ng),�@�Ǯ��I(y��)�O(sh��)Ӌ(j��)�Єe���n���O(sh��)Ӌ(j��)��������(sh��)�`�h(hu��n)��(ji��)����Ҫ���棬��(du��)��W(xu��)����������Ҫ�����x�������n�}��Ŀ�����ڌW(xu��)��(x��)����AVR��Ƭ�C(j��)�ĜضȲɼ�ϵ�y(t��ng)�O(sh��)Ӌ(j��)�Ļ���ԭ�����������̡����O(sh��)Ӌ(j��)���Æ�Ƭ�C(j��)���锵(sh��)��(j��)̎���c���Ɔ�Ԫ�������M(j��n)�Д�(sh��)��(j��)̎������Ƭ�C(j��)���Ɣ�(sh��)�֜ضȂ��������ќض���̖(h��o)ͨ�^�ο����Ĕ�(sh��)�֜ضȂ��������f��Ƭ�C(j��)�ϡ���Ƭ�C(j��)��(sh��)��(j��)̎��֮����ͨ�^�����B����PC�C(j��)���@ʾ���M(j��n)һ��̎����
1.2 AVR��Ƭ�C(j��)��(ji��n)��ATMEL��˾�аl(f��)��AVR��Ƭ�C(j��)����M�㲻ͬ������͑�(y��ng)�ã��֞�Tinyϵ�С�AT90ϵ�к�ATmegaϵ�С��@����(g��)ϵ�е�������̖(h��o)��AVR��Ƭ�C(j��)��ָ��ϵ�y(t��ng)���ݣ���(n��i)����ͬ��ֻ�Ǵ惦(ch��)��������Ƭ��(n��i)���ɵ�����ӿڵĔ�(sh��)�����ܴ���һЩ����Ñ����Ը���(j��)AVR��Ƭ�C(j��)��ͬ�����_��(sh��)Ŀ�̓r(ji��)������M(j��n)���x��M�㲻ͬ�đ�(y��ng)��ˮƽ��
ATmega��AVR��Ƭ�C(j��)��ϵ��֮һ��ATmegaϵ�І�Ƭ�C(j��)����AVR�еĸߙn�a(ch��n)Ʒ��
ATmegaϵ��AVR��Ƭ�C(j��)��Ҫ��ATmega8/16/32/64/128�Լ�ATmega8515/8535�ȡ�
ԓϵ�І�Ƭ�C(j��)������AT90�����е����c(di��n)������AT90�Ļ��A(ch��)���M(j��n)�����^��ĸ��ƣ������S��ӿڹ��ܣ���ϵ�y(t��ng)��ʡ����ԡ���(w��n)���ԡ����ɔ_�ԡ��`���Եȷ���������ߡ�
1.3 ATmega16��Ƭ�C(j��)ϵ�y(t��ng)�Y(ji��)��(g��u)ATmega16��һ�N��������(qi��ng)�͵�AVR RISC�Y(ji��)��(g��u)�ĵ��ġ�CMOS���g(sh��)��8λ�����������������M(j��n)��ָ��Լ��Εr(sh��)�����ָ���(zh��)�Еr(sh��)�g��ATmega16�Ĕ�(sh��)��(j��)�����ʸ��_(d��)1MIPS/MHz���Ķ����Ծ��pϵ�y(t��ng)�ڹ��ĺ�̎���ٶ�֮�g��ì�ܡ��Ǿ��и߿ɿ��ԡ����ٶȡ����ĵ����c(di��n)����һ�N���ԃr(ji��)�ȵĆ�Ƭ�C(j��)��
ATmega16���þ���(ji��n)ָ���RISC����һ�lָ�������һ��(g��)�r(sh��)����ڃ�(n��i)ͬ�r(sh��)��(du��)�ɂ�(g��)��(d��)���ļĴ����M(j��n)���L��������������ָ���L(zh��ng)�Ȇ�λ��ͬ�r(sh��)����ȡֵ���ڶ̡����A(y��)ȡָ������c(di��n)���\(y��n)��̎���������_(d��)��1MIPS/MHz��
ATmega16��Ƭ�C(j��)����Flash����惦(ch��)�������T����EEPROM��ͬ/�������пڡ�TWI��SPI��A/Dģ�M�D(zhu��n)�Q�������r(sh��)��/Ӌ(j��)��(sh��)���ȶ�N����������(qi��ng)�ɿ��Եď�(f��)λϵ�y(t��ng)��ͬ�r(sh��)�н����Ŀ��ɔ_������ģʽ���Д�ϵ�y(t��ng)��ݔ�벶�@�����^ƥ��ݔ�������ӻ����ܵĶ��r(sh��)��/Ӌ(j��)��(sh��)���Լ�������Q���ܵ�I/O�˿ڡ�
1.3.2 ATmega16�Ŀ��w�Y(ji��)��(g��u)ATmega128��Ƭ�C(j��)����ʮ�֏�(qi��ng)��(n��i)���Y(ji��)��(g��u)����(du��)���^��(f��)�s���係�w�Y(ji��)��(g��u)�������ׂ�(g��)���֣��քe��B���¡�
���ٴ�ȡRISC�Ĵ�������AVR�ă�(n��i)���е�32��(g��)ͨ�ù����Ĵ�����(g��u)�ɵģ���һ��(g��)�r(sh��)����ڃ�(n��i)�Ɉ�(zh��)��һ��(g��)������ALU������
��32��(g��)ͨ�ù����Ĵ����У���6��(g��)��������3��(g��)16λ���g�ӵ�ַ�Ĵ���ָᘣ��Ԍ�ַ��(sh��)��(j��)���g����(sh��)�F(xi��n)��Ч�ĵ�ַ�\(y��n)�㡣�����քe��X�Ĵ�����Y�Ĵ�����Z�Ĵ�����
AVR��Ƭ�C(j��)����CMOS���g(sh��)�����и��ٶȡ����ĵ����c(di��n)��ͬ�r(sh��)߀�������߹��ܡ���������ȵ���߲���̎�����\(y��n)��Ч�ʣ���������Harvard�Y(ji��)��(g��u)��������惦(ch��)���͔�(sh��)��(j��)�惦(ch��)��ʹ�ò�ͬ�Ĵ惦(ch��)���g�Ϳ��Y(ji��)����ֱ���L��ȫ���Ĕ�(sh��)��(j��)�惦(ch��)���ͳ���惦(ch��)�����Ĵ����ļ����p��ӳ�䲢�ܱ��L�������g(sh��)߉��Ԫ��ALU���ڈ�(zh��)��ijһָ��r(sh��)����һ��(g��)ָ��A(y��)�ȏij���惦(ch��)���б���ȡ̎���������MCU���\(y��n)��Ч�ʡ�
���g(sh��)߉��Ԫ��ALU��֧�ּĴ���֮�g�Լ��Ĵ����ͳ���(sh��)֮�g�����g(sh��)��߉�\(y��n)�㣬�Լ���һ�Ĵ���������ÿһ�ε��\(y��n)��Y(ji��)����ͨ�^��B(t��i)�Ĵ�����SREG����ӳ������
AVR�ij���惦(ch��)�����g������(d��o)����^(q��)�͑�(y��ng)�ó���^(q��)�M�ɡ��������x���x/�����o(h��)�Ɍ�(du��)��(y��ng)���i��λ�팍(sh��)�F(xi��n)��
I/O�惦(ch��)�����g����64��(g��)I/O�Ĵ������g�������Á�����MCU�ĸ���(g��)������ܡ�
��N��(d��)���ĕr(sh��)犷��l���鴮�Ю���ͨ�ţ�URAT����SPI�ṩ��ݔ��8/16λ���r(sh��)��/Ӌ(j��)��(sh��)�����������^����Ӌ(j��)��(sh��)���ⲿ�Д��PWM�Ŀ���ݔ����AVR��Ƭ�C(j��)���r(sh��)��/Ӌ(j��)��(sh��)�����Σ��p���g(sh��)�γ����Dz���ݔ�����^ƥ��Ĵ�����ϣ���������ռ�ձȡ��l�ʡ���λ��׃�ķ�����̖(h��o)��
AVR��Ƭ�C(j��)���Ԅ�(d��ng)��늏�(f��)λ�·��POR������(d��)���Ŀ��T���·��WDT������늉��z�y(c��)�·������(g��)��(f��)λԴ��ֻ���ڏ�(f��)λԴ��һ��(g��)������輴�Ɍ�(sh��)�F(xi��n)��(f��)λ������Ҫ�����ⲿ��(f��)λ������
1.4 �ضȂ������˂�?y��u)��ˏ����@ȡ��Ϣ����횽����ڸ��X���١����ο��˂������ĸ��X���٣����о���Ȼ�F(xi��n)���Ҏ(gu��)���Լ����a(ch��n)���(d��ng)�������Ĺ��ܾ��h(yu��n)�h(yu��n)�����ˡ����m��(y��ng)�@�N��r������Ҫ����������˿����f���������������ٵ����L(zh��ng)���ַQ֮�����١�
�¼��g(sh��)�����ĵ����������_ʼ�M(j��n)����Ϣ�r(sh��)������������Ϣ���^���У�����Ҫ��Q�ľ���Ҫ�@ȡ��(zh��n)�_�ɿ�����Ϣ�����������ǫ@ȡ��Ȼ�����a(ch��n)�I(l��ng)������Ϣ����Ҫ;���c�ֶΡ�
�ڬF(xi��n)�����I(y��)���a(ch��n)�������Ԅ�(d��ng)�����a(ch��n)�^���У�Ҫ�ø��N���������O(ji��n)ҕ�Ϳ������a(ch��n)�^���еĸ���(g��)����(sh��)��ʹ�O(sh��)�乤����������B(t��i)����Ѡ�B(t��i)����ʹ�a(ch��n)Ʒ�_(d��)����õ��|(zh��)������˿����f���]�б���ă�(y��u)���Ă��������F(xi��n)�������a(ch��n)Ҳ��ʧȥ�˻��A(ch��)��
�ڻ��A(ch��)�W(xu��)���о��У�������������ͻ���ĵ�λ�����������ѝB���T�繤�I(y��)���a(ch��n)�������_�l(f��)������̽�y(c��)���h(hu��n)�����o(h��)���YԴ�{(di��o)�顢�t(y��)�W(xu��)�\�ࡢ���﹤�̡��������ﱣ�o(h��)�ȵȘO��֮�����I(l��ng)���Ժ����䏈���f����ãã��̫�գ�����嫵ĺ����������N��(f��)�s�Ĺ���ϵ�y(t��ng)����ÿһ��(g��)�F(xi��n)�����(xi��ng)Ŀ�����x���_���N���ӵĂ�������
�ɴ˿�Ҋ�����������g(sh��)�ڰl(f��)չ��(j��ng)��(j��)���Ƅ�(d��ng)���(hu��)�M(j��n)���������Ҫ���ã���ʮ�����@�ġ��������(gu��)��ʮ����ҕ�@һ�I(l��ng)��İl(f��)չ�����Ų��õČ��������������g(sh��)����(hu��)���F(xi��n)һ��(g��)�w�S���_(d��)���c����Ҫ��λ��Q����ˮƽ��
1.4.1 ��(sh��)��ʽ�ضȂ�������(sh��)��ʽ�ضȂ������������ܰќض���������ͨ�^�ض�����Ԫ��������(y��ng)�·�D(zhu��n)�Q�ɷ���Ӌ(j��)��C(j��)��plc�����܃x���Ȕ�(sh��)��(j��)�ɼ��O(sh��)��ֱ���xȡ�Ô�(sh��)�����Ă�������
1.5 ���ڸ���1.5.1 ���ڽ�B���нӿں�(ji��n)�Q���ڣ�Ҳ�Q����ͨ�Žӿڣ�ͨ��ָCOM�ӿڣ����Dz��ô���ͨ�ŷ�ʽ�ĔU(ku��)չ�ӿڡ�
���нӿ�Serial Interface��ָ��(sh��)��(j��)һλһλ�������ͣ������c(di��n)��ͨ�ž�·��(ji��n)�Σ�ֻҪһ��(du��)��ݔ���Ϳ��Ԍ�(sh��)�F(xi��n)�p��ͨ�ţ������������Ԓ�����Ķ�����˳ɱ����e�m�����h(yu��n)���xͨ�ţ��������ٶ��^����һ�l��Ϣ�ĸ�λ��(sh��)��(j��)����λ�������͵�ͨӍ��ʽ�Q�鴮��ͨӍ������ͨӍ�����c(di��n)�ǣ���(sh��)��(j��)λ���ͣ�����λ����M(j��n)�У�����ֻ��һ����ݔ��������ɣ��ɱ��͵������ٶ���������ͨӍ�ľ��x���ԏĎ�����ǧ�ף�����(j��)��Ϣ�Ă��ͷ�����ͨӍ�����M(j��n)һ���֞�ι������p����ȫ�p�����N��
���ڵij��F(xi��n)����1980��ǰ��(sh��)��(j��)��ݔ����115kbps��230kbps�����ڳ��F(xi��n)�ij����Ǟ��ˌ�(sh��)�F(xi��n)�B��Ӌ(j��)��C(j��)���O(sh��)��Ŀ�ģ����ڴ���һ���Á��B�����(bi��o)������Modem�Լ���ʽ�z���^�͌��ְ���O(sh��)�䡣����Ҳ���ԑ�(y��ng)�������ڃ��_(t��i)Ӌ(j��)��C(j��)�����O(sh��)�䣩֮�g�Ļ�(li��n)����(sh��)��(j��)��ݔ�����ڴ��ڣ�COM����֧�֟��μ���ݔ�����^��Ŀǰ����������ʹֱ�y��X���_ʼȡ��ԓ�ӿڣ�Ŀǰ���ڶ����ڹ��غ͜y(c��)���O(sh��)���Լ�����ͨ���O(sh��)���С�
1.5.2 ���ڷ������ͨ�ŵăɷN������ķ�ʽ��ͬ������ͨ�ŷ�ʽ�ͮ�������ͨ�ŷ�ʽ��
���нӿڰ�늚��(bi��o)��(zh��n)���f(xi��)�h����,����RS-232-C��RS-422��RS485�ȡ�RS-232-C��RS-422�cRS-485��(bi��o)��(zh��n)ֻ��(du��)�ӿڵ�늚���������Ҏ(gu��)�������漰�Ӳ������|��f(xi��)�h��
Ҳ�Q��(bi��o)��(zh��n)���ڣ���õ�һ�N����ͨӍ�ӿڡ�������1970��������(gu��)��ӹ��I(y��)�f(xi��)��(hu��)��EIA��(li��n)��ؐ��ϵ�y(t��ng)���{(di��o)�ƽ��{(di��o)���S�Ҽ�Ӌ(j��)��C(j��)�K�����a(ch��n)�S�ҹ�ͬ�ƶ������ڴ���ͨӍ�Ę�(bi��o)��(zh��n)������ȫ���ǡ���(sh��)��(j��)�K���O(sh��)�䣨DTE���͔�(sh��)��(j��)ͨӍ�O(sh��)�䣨DCE��֮�g���ж��M(j��n)�Ɣ�(sh��)��(j��)���Q�ӿڼ��g(sh��)��(bi��o)��(zh��n)�������y(t��ng)��RS-232-C�ӿژ�(bi��o)��(zh��n)��22���������Ø�(bi��o)��(zh��n)25оD�Ͳ��^����DB25�������ʹ�ú�(ji��n)����9оD�Ͳ�����DB9�����F(xi��n)�ڑ�(y��ng)����25о���^���Ѻ��ٲ��á�
RS-232��ȡ��ƽ���ݔ��ʽ�������^�ζ�ͨӍ��������l(f��)���ƽ�c�����ƽ�IJ�H��2V��3V���ң������乲ģ����������ټ����p�g���ϵķֲ���ݣ�����;��x����s15�ף�������ʞ�20kb/s��RS-232�Ǟ��c(di��n)��(du��)�c(di��n)����ֻ��һ��(du��)�ա��l(f��)�O(sh��)�䣩ͨӍ���O(sh��)Ӌ(j��)�ģ����(q��)��(d��ng)��ؓ(f��)�d��3��7k��������RS-232�m�ϱ����O(sh��)��֮�g��ͨ�š�
��(bi��o)��(zh��n)ȫ�Q�ǡ�ƽ��늉���(sh��)�ֽӿ��·��늚����ԡ��������x�˽ӿ��·�����ԡ����͵�RS-422���ľ��ӿڡ���(sh��)�H��߀��һ����̖(h��o)�ؾ�����5��������DB9�B�������_���x�����ڽ��������ø�ݔ���迹�Ͱl(f��)���(q��)��(d��ng)����RS232����(qi��ng)���(q��)��(d��ng)�����������S����ͬ��ݔ�����B�Ӷ���(g��)���չ�(ji��)�c(di��n)�����ɽ�10��(g��)��(ji��)�c(di��n)����һ��(g��)���O(sh��)�䣨Master������������O(sh��)�䣨Slave�������O(sh��)��֮�g����ͨ�ţ�����RS-422֧���c(di��n)��(du��)����p��ͨ�š�������ݔ���迹��4k���ʰl(f��)�����ؓ(f��)�d������10��4k+100�����K����裩��RS-422�ľ��ӿ����ڲ��ÆΪ�(d��)�İl(f��)�ͺͽ���ͨ������˲��ؿ��Ɣ�(sh��)��(j��)�����b��֮�g�κα�횵���̖(h��o)���Q������ܛ����ʽ��XON/XOFF���֣���Ӳ����ʽ��һ��(du��)�Ϊ�(d��)���p�g������(sh��)�F(xi��n)��
RS-422������ݔ���x��1219�ף�����ݔ���ʞ�10Mb/s����ƽ���p�g�����L(zh��ng)���c��ݔ���ʳɷ��ȣ���100kb/s�������£��ſ����_(d��)������ݔ���x��ֻ���ں̵ܶľ��x�²��ܫ@��������ʂ�ݔ��һ��100���L(zh��ng)���p�g�������ܫ@�õ�����ݔ���ʃH��1Mb/s��
�Ǐ�RS-422���A(ch��)�ϰl(f��)չ�����ģ�����RS-485�S��늚�Ҏ(gu��)���cRS-422��¡��綼����ƽ���ݔ��ʽ������Ҫ�ڂ�ݔ���ϽӽK�����ȡ�RS-485���Բ��ö����c�ľ���ʽ�������ƿɌ�(sh��)�F(xi��n)�����Ķ��c(di��n)�p��ͨ�ţ��������ľ��B�ӕr(sh��)���cRS-422һ��ֻ�܌�(sh��)�F(xi��n)�c(di��n)��(du��)���ͨ�ţ���ֻ����һ��(g��)����Master���O(sh��)�䣬��������O(sh��)�䣬������RS-422�и��M(j��n)���oՓ�ľ�߀�Ƕ����B�ӷ�ʽ�����Ͽɶ�ӵ�32��(g��)�O(sh��)�䡣
RS-485�cRS-422�IJ�ͬ߀�����乲ģݔ��늉��Dz�ͬ�ģ�RS-485��-7V��+12V֮�g����RS-422��-7V��+7V֮�g��RS-485��������Сݔ���迹��12k����RS-422��4k��������RS-485�M������RS-422��Ҏ(gu��)��������RS-485���(q��)��(d��ng)����������RS-422�W(w��ng)�j(lu��)�Б�(y��ng)�á�
RS-485�cRS-422һ�ӣ�������ݔ���x�s��1219�ף�����ݔ���ʞ�10Mb/s��ƽ���p�g�����L(zh��ng)���c��ݔ���ʳɷ��ȣ���100kb/s�������£��ſ���ʹ��Ҏ(gu��)�����L(zh��ng)����|�L(zh��ng)�ȡ�ֻ���ں̵ܶľ��x�²��ܫ@��������ʂ�ݔ��һ��100���L(zh��ng)�p�g������ݔ���ʃH��1Mb/s
1.6 protel DXP2004ܛ�����������Լ�ʹ��Altium��˾����EDA�I(l��ng)�����һ��(g��)�I(l��ng)�ȹ�˾����ԭ��Protel 99SE�Ļ��A(ch��)�ϣ���(y��ng)�������M(j��n)��ܛ���O(sh��)Ӌ(j��)�����������Ƴ���һ�����Windows2000��Windows XP����ϵ�y(t��ng)��EDA�O(sh��)Ӌ(j��)ܛ��Protel DXP��
Protel DXP2004��Altium��˾��2004���Ƴ������°汾���·�O(sh��)Ӌ(j��)ܛ����ԓܛ���܌�(sh��)�F(xi��n)�ĸ����O(sh��)Ӌ(j��)��플��O(sh��)Ӌ(j��)ֱ��ݔ�����a(ch��n)��(sh��)��(j��)�Լ��@֮�g�����з����(y��n)�C���O(sh��)Ӌ(j��)��(sh��)��(j��)�Ĺ�������(d��ng)ǰ���^���е�Protel 98��Protel 99 SE����������ǰ�ڰ汾��
Protel DXP 2004�Ѳ��džμ���PCB��ӡ���·�壩�O(sh��)Ӌ(j��)���ߣ������ɶ���(g��)ģ�K�M�ɵ�ϵ�y(t��ng)���ߣ��քe��SCH��ԭ��D���O(sh��)Ӌ(j��)��SCH��ԭ��D�����桢PCB��ӡ���·�壩�O(sh��)Ӌ(j��)��Auto Router���Ԅ�(d��ng)����������FPGA�O(sh��)Ӌ(j��)�ȣ����w����PCB����ĵ�����(g��)�����O(sh��)Ӌ(j��)��ԓܛ�����(xi��ng)Ŀ������ʽ��ԭ��D��PCB�D���p��ͬ�����g(sh��)����ͨ���O(sh��)Ӌ(j��)���ؘ��Ԅ�(d��ng)�����Լ��·����ȼ��g(sh��)�Y(ji��)����һ�𣬞��·�O(sh��)Ӌ(j��)�ṩ�ˏ�(qi��ng)���֧�֡���D1-1���D1-2��ʾ��ԓܛ���Ĺ������漰�·�D��
�D1-1 protel dxp2004 ��������

�D1-2 protel dxp2004 �·�D
�c�^��İ汾����Protel99��ȣ�Protel DXP 2004���H�����^���@�ø��Ӻ��A�����Ի������ҘO��؏�(qi��ng)�����·�O(sh��)Ӌ(j��)��ͬ������ͬ�r(sh��)������VHDL��FPGA�O(sh��)Ӌ(j��)ϵ�y(t��ng)���书�ܴ��ӏ�(qi��ng)�ˡ�
1.7 ϵ�y(t��ng)�����O(sh��)Ӌ(j��)ϵ�y(t��ng)�����O(sh��)Ӌ(j��)��Ӳ���O(sh��)Ӌ(j��)������ܛ���O(sh��)Ӌ(j��)�����M�ɣ���D1-3��ʾ��
��ϵ�y(t��ng)��Ӳ�������ضȂ�������AVR��Ƭ�C(j��)�Լ�PC�C(j��)������AVR��Ƭ�C(j��)��PC�C(j��)ͨ�^�����B�ӡ�
![]()
![]()
�D1-3 ϵ�y(t��ng)�O(sh��)Ӌ(j��)ʾ��D
1.7.1 ܛ���O(sh��)Ӌ(j��)����ϵ�y(t��ng)��DS18B20����������Ԍ��ض�ģ�M���D(zhu��n)����늉���(sh��)�����Կ��������Ƭ�C(j��)����ATmega16����оƬ������оƬ��(du��)DS18B20����Ĝض�ֵ�M(j��n)��̎�����Ɇ�Ƭ�C(j��)������ƣ�����(j��ng)̎����Ĝض���LCD��(sh��)�a���@ʾ������
��ϵ�y(t��ng)�����·��(ji��n)�������ܿɿ������c(di��n)�����ڌ�(sh��)�F(xi��n)��
����(j��)ϵ�y(t��ng)�O(sh��)���h(hu��n)�������x��DS18B20����ضȲɼ�ϵ�y(t��ng)�Ĕ�(sh��)��ʽ�ضȂ�������
DS18B20 ������(gu��) Dallas �댧(d��o)�w��˾����һ����(sh��)��ʽ�ضȂ������������Ъ�(d��)�صĆο����ӿڷ�ʽ�������S��һ�l��̖(h��o)���ϒ�Ӕ�(sh��)ʮ�����ϰق�(g��)��(sh��)��ʽ���������Ķ�ʹ�y(c��)���b���c���������Ľӿ�׃��ʮ�ֺ�(ji��n)�Σ��˷���ģ�Mʽ�������c�C(j��)�ӿڕr(sh��)��Ҫ��A/D�D(zhu��n)�Q����������(f��)�s����·��ȱ�c(di��n)�������M�ɵĜضȜy(c��)��ϵ�y(t��ng)�dz����㣬���ҳɱ��͡��w�eС���ɿ��Ըߵȃ�(y��u)�c(di��n)��
2.1 DS18B20 ��(sh��)��ʽ�ضȂ�������������DS18B20��(sh��)��ʽ�ضȂ��������ⲿ�Π��(n��i)��оƬ��D2-1��ʾ����ʹ��һ�������ӿڌ�(sh��)�F(xi��n)���ⲿ̎������ͨ�š��ضȵĜy(c��)��������-55�� + 125��C���y(c��)�����Ȟ� 0. 5��C���������Ĺ�늼�����ͨ�ŵĿ����� ,���ԏ�һ������ͨ���еĸ��ƽ��ȡ�ã��@�ӿ��Բ���Ҫ�ⲿ�Ĺ���Դ���������Ҳ��ֱ���ù�늶� (VDD)��늡���(d��ng)ʹ�ÿ���������늕r(sh��) ,��늶˱�횽ӵأ�ͬ�r(sh��)�������ڿ��e�ĕr(sh��)���횱��ָ��ƽ���Ա㌦(du��)��������늡�ÿһ��(g��) DS18B20 �ضȂ���������һ��(g��)�Լ����е�оƬ����̖(h��o)���҂����Ԍ�����(g��)�@�ӵĜضȂ����������һ�������ϣ���(sh��)�F(xi��n)���c(di��n)�ضȵęz�y(c��)��
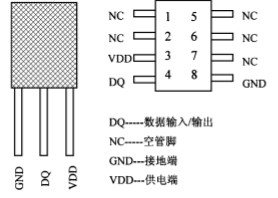
�D2-1 DS18B20�ⲿ�Π���_�D������D
DS18B20���ã��_PR��35���b���_SOIC���b�����(n��i)���Y(ji��)��(g��u)��D��D2-2��ʾ��

�D2-2 DS18B20��(n��i)���Y(ji��)��(g��u)
DS18B20�����ԣ�
��1���m��(y��ng)늉�����������늉�������3.0��5.5V�������Դ��ʽ�¿��ɔ�(sh��)��(j��)����늡�
��2����(d��)�صĆξ��ӿڷ�ʽ��DS18B20���c̎�����B�ӕr(sh��)�H��Ҫһ�l�ھ����Ɍ�(sh��)�F(xi��n)̎�����cDS18B20���p��ͨӍ��
��3��DS18B20֧�ֶ��c(di��n)�M�W(w��ng)���ܣ�����(g��)DS18B20���Բ�(li��n)��Ψһ�������ϣ���(sh��)�F(xi��n)�M�W(w��ng)���c(di��n)�y(c��)�ء�
��4��DS18B20��ʹ���в���Ҫ�κ����Ԫ����ȫ������Ԫ�����D(zhu��n)�Q�·����������һֻ���O�ܵļ����·��(n��i)��
��5���ط�����55�桫��125�棬��-10��+85��r(sh��)���Ȟ��0.5�档
��6���ɾ��̵ķֱ��ʞ�9��12λ����(du��)��(y��ng)�Ŀɷֱ�ضȷքe��0.5�桢0.25�桢0.125���0.0625�棬�Ɍ�(sh��)�F(xi��n)�߾��Ȝy(c��)�ء�
��7����9λ�ֱ��ʕr(sh��)�����93.75ms��(n��i)�ќض��D(zhu��n)�Q�锵(sh��)�֣�12λ�ֱ��ʕr(sh��)�����750ms��(n��i)�ќض�ֵ�D(zhu��n)�Q�锵(sh��)�֣��ٶȸ��졣
��8���y(c��)���Y(ji��)��ֱ��ݔ����(sh��)�֜ض���̖(h��o)���ԡ�һ�����������Ђ��ͽoCPU��ͬ�r(sh��)�ɂ���CRCУ�(y��n)�a�����ИO��(qi��ng)�Ŀ��ɔ_�m�e(cu��)������
��9��ؓ(f��)�����ԣ��Դ�O�Խӷ��r(sh��)��оƬ����(hu��)��l(f��)�������������������������
DS18B20�ضȂ������ă�(n��i)���惦(ch��)��߀����һ��(g��)���ٕ���RAM��һ��(g��)����ʧ�ԵĿ�늲�����EERAM�����ٕ���RAM�ĽY(ji��)��(g��u)�飸�ֹ�(ji��)�Ĵ惦(ch��)�����Y(ji��)��(g��u)��D3��ʾ���^����(g��)�ֹ�(ji��)�����y(c��)�õĜض���Ϣ���ڣ��͵ڣ��ֹ�(ji��)�ԣȺͣԣ̵Ŀ�ؐ������ʧ�ģ�ÿ����늏�(f��)λ�r(sh��)��ˢ�¡��ڣ���(g��)�ֹ�(ji��)�������üĴ��������ă�(n��i)�����ڴ_���ض�ֵ�Ĕ�(sh��)���D(zhu��n)�Q�ֱ��ʡ�DS18B20�����r(sh��)�Ĵ����еķֱ����D(zhu��n)�Q������(y��ng)���ȵĜضȔ�(sh��)ֵ��ԓ�ֹ�(ji��)��λ�Ķ��x��D3��ʾ���ͣ�λһֱ�飱���ԣ��ǹ���ģʽλ�������O(sh��)��DS18B20�ڹ���ģʽ߀���ڜy(c��)ԇģʽ��DS18B20���S�r(sh��)ԓλ���O(sh��)�Þ飰���Ñ�Ҫȥ�Ą�(d��ng)��R1��R0�Q���ض��D(zhu��n)�Q�ľ���λ��(sh��)�����O(sh��)�÷ֱ��ʡ�
DS18B20�Ĝy(c��)��ԭ�����@�ӵ�,�����е͜ض�ϵ��(sh��)�������ʎ�l���ܜضȵ�Ӱ푺�С�����ڮa(ch��n)���̶��l�ʵ��}�_��̖(h��o)�ͽo�p��Ӌ(j��)��(sh��)��1���ߜض�ϵ��(sh��)�����S�ض�׃������ʎ�l�����@��׃�����a(ch��n)������̖(h��o)����p��Ӌ(j��)��(sh��)�������}�_ݔ�롣������߀��һ��(g��)Ӌ(j��)��(sh��)�T����(d��ng)Ӌ(j��)��(sh��)�T���_�r(sh��)��DS18B20�͌�(du��)�͜ض�ϵ��(sh��)��ʎ���a(ch��n)���ĕr(sh��)��}�_�M(j��n)��Ӌ(j��)��(sh��)�M(j��n)����ɜضȜy(c��)����Ӌ(j��)��(sh��)�T���_���r(sh��)�g�ɸߜض�ϵ��(sh��)��ʎ����Q����ÿ�Μy(c��)��ǰ�����Ȍ���55������(du��)��(y��ng)��һ��(g��)����(sh��)�քe����p��Ӌ(j��)��(sh��)�������ضȼĴ����У�Ӌ(j��)��(sh��)�����͜ضȼĴ������A(y��)���ڣ�55������(du��)��(y��ng)��һ��(g��)����(sh��)ֵ���p��Ӌ(j��)��(sh��)������(du��)�͜ض�ϵ��(sh��)����a(ch��n)�����}�_��̖(h��o)�M(j��n)�Мp��Ӌ(j��)��(sh��)����(d��ng)�p��Ӌ(j��)��(sh��)�������A(y��)��ֵ�p�����r(sh��)���ضȼĴ�����ֵ����1���p��Ӌ(j��)��(sh��)�������A(y��)�Ì����±��b�룬�p��Ӌ(j��)��(sh��)���������_ʼ��(du��)�͜ض�ϵ��(sh��)����a(ch��n)�����}�_��̖(h��o)�M(j��n)��Ӌ(j��)��(sh��)�����ѭ�h(hu��n)ֱ���p��Ӌ(j��)��(sh��)��Ӌ(j��)��(sh��)�����r(sh��)��ֹͣ�ضȼĴ������ۼӣ��˕r(sh��)�ضȼĴ����еĔ�(sh��)ֵ�������y(c��)�ض�ֵ����ݔ�����������p��Ӌ(j��)��(sh��)�����A(y��)��ֵ��ֻҪӋ(j��)��(sh��)���T��δ�P(gu��n)�]���؏�(f��)�����^�̣�ֱ���ضȼĴ���ֵ���±��y(c��)�ض�ֵ��
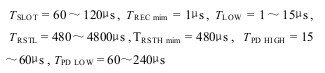
2.2 DS18B20�y(c��)��ģ�K2.2.1 DS18B20������ʽ����(j��)DS18B20�ąf(xi��)�hҎ(gu��)������Ƭ�C(j��)����DS18B20��ɜض��D(zhu��n)�Q��횽�(j��ng)�^����4��(g��)���E��
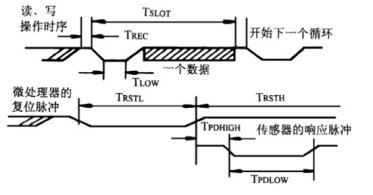
�D2-3 �����x���r(sh��)��D
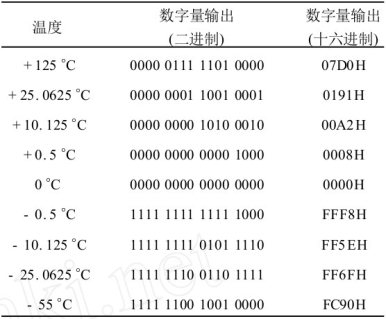
���� DS18B20�������ă�(n��i)����(sh��)��(j��)�惦(ch��)����9��(g��)�ֹ�(ji��)�M�ɡ���һ������(g��)�ֹ�(ji��)�ǜضȔ�(sh��)��(j��)�ֹ�(ji��)(MSB��LSB)��������ϵ�y(t��ng)���üĴ����������O(sh��)�Ô�(sh��)��(j��)λ��(sh��)(9��12λ)����(sh��)��(j��)λԽ���ضȷֱ���Խ�ߣ�9λ��(sh��)��(j��)�ضȷֱ��� ��0.5��C��12λ��(sh��)��(j��)�ضȷֱ���0. 0625��C������ĸ�λ�ǜضȔ�(sh��)��(j��)�ķ�̖(h��o)�U(ku��)չλ���ضȔ�(sh��)��(j��)��ʽ���2-1���С����������ֹ�(ji��)�ǜض������ވ�(b��o)��ֵ(TH��TL)�������ֹ�(ji��)��ϵ�y(t��ng)�üĴ������Ĵ�����λ���x���£��ڰ�λ���O(sh��)���Á���ʾ�������Ĺ�����B(t��i)���ǜy(c��)ԇ��B(t��i)(�O(sh��)�Þ顰1��)߀�Dz������ܠ�B(t��i)(�O(sh��)�Þ顰0��) �����S�O(sh��)�Þ�������ܠ�B(t��i)���Ñ������ģ����ߡ�����λ�ǜض��D(zhu��n)�Q��(sh��)��(j��)λ���O(sh��)��(00��01��10��11�քe��(du��)��(y��ng)9��10��11��12λ�ضȔ�(sh��)��(j��))�����S�O(sh��)�Þ� 12 λ�ضȔ�(sh��)��(j��)λ���Ñ��ɸ���(j��)��Ҫ�M(j��n)���ģ�����λ�oЧ���������ߡ����ֹ�(ji��)����δ�á���9��(g��)�ֹ�(ji��)��CRCУ�(y��n)�a����ǰ��8��(g��)�ֹ�(ji��)��ѭ�h(hu��n)У�(y��n)�a������ͨ���У��z�(y��n)��(sh��)��(j��)���͵����_�ԡ�
��2-1 DS18B20�ضȔ�(sh��)��(j��)
�҂�����ATmega16��Ƭ�C(j��)����̎������DS18B20��(sh��)��ʽ�ضȂ������ṩ��9λ�ضȔ�(sh��)��ָʾ�����Ĝض���Ϣ��(j��ng)�^�νӿ���DS18B20�ͳ�����DS18B20����Ƭ�C(j��)ֻ��һ�l������˷Q��ξ���
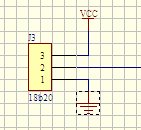
�����O(sh��)Ӌ(j��)�ĜضȲɼ�ϵ�y(t��ng)��Ҫ�Ѓɲ��ֽM�ɣ�һ�����ǜضȲɼ����֣�һ�����ǜض��@ʾ���֡�DS18B20��(sh��)��(j��)����AVR��Ƭ�C(j��)PA7��(sh��)��(j��)����Vcc�g��һ4.7k������衣
��y(c��)�س���������D2-3��
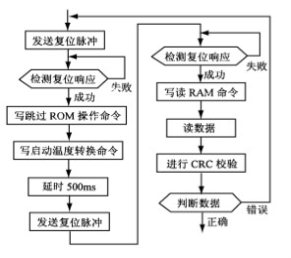
�D2-3 �y(c��)�س������̈D
3 ATmega16��Ƭ�C(j��)ܛӲ���O(sh��)Ӌ(j��)3.1 ATmega16���_�f������(j��)AVR��Ƭ�C(j��)���c(di��n)���n�}���O(sh��)���h(hu��n)�������x��ATmega16�����Ƭ�C(j��)��
�D3-1��ʾATmega16��Ƭ�C(j��)���_�D��
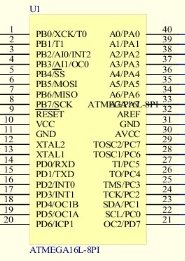
�D3-1 ATmega16���_�D
ᘌ�(du��)�@�ε��n�}�O(sh��)Ӌ(j��)��(n��i)�ݣ������O(sh��)Ӌ(j��)�Ļ���ATmega16Ӳ����·���������ײ��֣�
1����(f��)λ��·
2������·
3��AD�D(zhu��n)�Q�V����·
4��ISP���d�ӿ�
5��JTAG����ӿ�
6���Դ
3.2.1 ��(f��)λ��·���O(sh��)Ӌ(j��)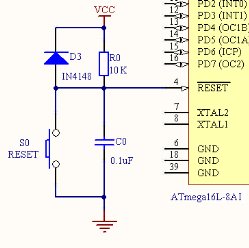
�D3-2 ��(f��)λ��·�O(sh��)Ӌ(j��)�D
ATmega16�ѽ�(j��ng)��(n��i)������늏�(f��)λ�O(sh��)Ӌ(j��)���������۽zλ����Կ��Ə�(f��)λ�r(sh��)���~��r(sh��)�g����AVR�ⲿ�ď�(f��)λ��·����늕r(sh��)�������O(sh��)Ӌ(j��)�úܺ�(ji��n)�Σ�ֱ����һֻ10K����赽VCC����(R0)����D3-2��ʾ��
���˿ɿ����ټ���һֻ0.1uF�����(C0)�������ɔ_���s����
D3(1N4148)�������Ѓɂ�(g��)������һ�nj���(f��)λݔ������늉��Q��Vcc+0.5V ���ң���һ������ϵ�y(t��ng)��늕r(sh��)����R0(10K)����·��C0���ٷ�늣���һ��늕r(sh��)���ܮa(ch��n)����Ч�ď�(f��)λ��
��(d��ng)AVR�ڹ����r(sh��)������S0�_�P(gu��n)�r(sh��)����(f��)λ�_׃�ɵ��ƽ���|�l(f��)AVRоƬ��(f��)λ��
��Ҫ�f������(sh��)�H��(y��ng)�Õr(sh��)���������Ҫ��(f��)λ���o����(f��)λ�_���Բ����κε������AVRоƬҲ�ܷ�(w��n)�����������@���ֲ���Ҫ�κε���������
3.2.2 �����·���O(sh��)Ӌ(j��)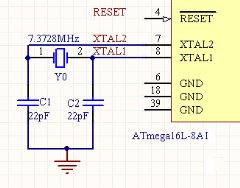
�D3-3 �����·�O(sh��)Ӌ(j��)�D
ATmega16�ѽ�(j��ng)��(n��i)��RC��ʎ��·�����Ԯa(ch��n)��1M��2M��4M��8M����ʎ�l�ʡ����^����(n��i)�õĮ�����RC��ʎ����һЩҪ���^�ߵĈ�(ch��ng)�ϣ�����Ҫ�cRS232ͨ����Ҫ���^���_�IJ����ʕr(sh��)�����hʹ���ⲿ�ľ���·����D3-3��ʾ��
���ڵ�90Sϵ�У�����ɶ˾���Ҫ��22pF���ҵ���ݡ�ATmegaϵ�Ќ�(sh��)�Hʹ�Õr(sh��)���@��ֻС��ݲ���Ҳ���������������^���˾�·��Ҏ(gu��)�������Խ��h���ϡ�
��Ҫ�f������(sh��)�H��(y��ng)�Õr(sh��)���������Ҫ̫�߾��ȵ��l�ʣ�����ʹ�Ã�(n��i)��RC��ʎ�����@���ֲ���Ҫ�κε���������
3.2.3 AD�D(zhu��n)�Q�V����·���O(sh��)Ӌ(j��)��pСAD�D(zhu��n)�Q���Դ�ɔ_��ATmega16оƬ�Ъ�(d��)����AD�Դ��늡��ٷ��ęn���]��VCC����һֻ10uH��늸У�L1����Ȼ���һֻ0.1uF����ݵ��أ�C3������D3-4��ʾ��ATmega16��(n��i)��2.56V��(bi��o)��(zh��n)����늉���Ҳ���ԏ�����ݔ��?y��n)���늉�������������ʹ��TL431����(zh��n)늉�Դ�����^һ��đ�(y��ng)��ʹ�Ã�(n��i)���Ԏ��ą���늉��ѽ�(j��ng)�����(x��)�T����AREF�_��һֻ0.1uF����ݵ��أ�C4����
��Ҫ�f������(sh��)�H��(y��ng)�Õr(sh��)������뺆(ji��n)����·�����Ԍ�AVCCֱ�ӽӵ�VCC��AREF�ҿա����@���ֲ���Ҫ�κε���������
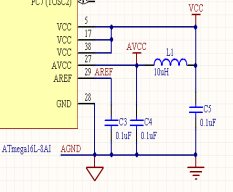
�D3-4 AD�D(zhu��n)�Q�V����·�O(sh��)Ӌ(j��)�D
3.2.4 ISP���d�ӿ��O(sh��)Ӌ(j��)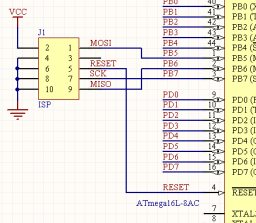
�D3-5 ISP���d�ӿ��O(sh��)Ӌ(j��)�D
ISP���d�ӿڣ�����Ҫ�κε���������ʹ���p��2��5���������ڛ]������������PB5��MOSI����PB6��MISO����PB7��SCK������(f��)λ�_�Կ�������ʹ�ã�����ISP�ĸɔ_����D3-5��ʾ��
��Ҫ�f������(sh��)�H��(y��ng)�Õr(sh��)������뺆(ji��n)����������Բ�����2��5��������PCB�O(sh��)Ӌ(j��)�r(sh��)��ñ����@��(g��)��λ���Ա��Ժ�����(j��)AVR��(n��i)��ܛ����
3.2.5 JTAG����ӿ��O(sh��)Ӌ(j��)
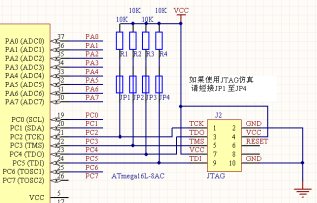
�D3-6 JTAG����ӿ��O(sh��)Ӌ(j��)�D
����ӿ�Ҳ��ʹ���p��2��5��������Ҫ��ֻ10K��������衣
��Ҫ�f������(sh��)�H��(y��ng)�Õr(sh��)���������ʹ��JTAG���棬���Ҳ�������ֻ10K����������Ӱ푣����Ԍ�JP1��JP4���_����D3-6��ʾ��
3.2.6 �Դ�O(sh��)Ӌ(j��)
�D3-7 �Դ�O(sh��)Ӌ(j��)�D
AVR��Ƭ�C(j��)��õ���5V�c3.3V�ɷN늉�������·���_�P(gu��n)�ГQ�ɷN늉����������pɫ���O��ָʾ��5V�r(sh��)��G����3.3V�r(sh��)��t��������D3-7��ʾ��
���O��D1��ֹ�Ñ����e(cu��)�Դ�O�ԡ�D2�������S�Ñ�늉���������·��(n��i)������(hu��)�p��1117��ADJ��
1117��ADJ�����Ԟ�1�_��(hu��)��50uA�����ݔ����1��2�_��(hu��)��1.25V늉��������@��(g��)���c(di��n)������Ӌ(j��)���ݔ��늉���
��(d��ng)SW�_�P(gu��n)������߅�r(sh��)��R6�ϵ������ 1.25/0.33 = 3.78ma ��R8�ϵ������1117��ADJ 1�_�������R6�ϵ��������0.05+3.78=3.83ma. ����Ӌ(j��)���R8�ϵ�늉���3.84V�� ���ǵó�VCC=1.25+3.83=5.08V���`����2%�ԃ�(n��i)��
��(d��ng)SW�_�P(gu��n)������߅�r(sh��)��R6�ϵ������ 1.25/0.62 = 2.02ma ��R8�ϵ������1117��ADJ 1�_�������R6�ϵ��������0.05+2.02=2.07ma. ����Ӌ(j��)���R8�ϵ�늉���2.07V�� ���ǵó�VCC=1.25+2.07=3.32V���`����1%�ԃ�(n��i)��
ʹ��1%���ȵ���裬���Կ�������(g��)ݔ��늉��`����3%�ԃ�(n��i)��
��Ҫ�f������(sh��)�H��(y��ng)�Õr(sh��)������(j��)ʹ��1117��ADJ��Ʒ�ƣ�ݔ��늉����Ե���7���������͡���Ҳ����ͬ�r(sh��)ʹ�õ͉����Ķ��O�ܴ���1N4007����
3.2.7���O(sh��)Ӌ(j��)�D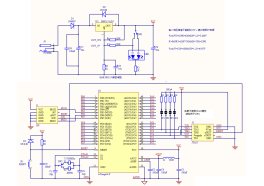
�D3-8 ATmega16Ӳ�����O(sh��)Ӌ(j��)�D
���O(sh��)Ӌ(j��)�D����D3-8��ʾ�������������µ�ATmega16����С�塣
����D���������ʹ���ݽz�̶��ķ������Q����������(sh��)�(y��n)�����_(d��)��һ���Ŀɿ��ԡ�VCC��GND����һ�y(c��)ԇᘣ���D3-9��ʾ��

�D3-9 ATmega16���ܰ�����D
�ײ��D�����˷��㌍(sh��)�(y��n)�����@�KС���ݔ���_����ֱ��ATmega16�Ĺ��_���ж��x�����ֹ��С�ĵ������ό�(d��o)�²���۔࣬���b��һֻ40�_�ĈA��IC�������o(h��)�������С���۔࣬���Է���ظ��Q�A��IC������D3-10��ʾ��

�D3-10 ATmega16���ܰ屳��D
3.3 ܛ��ϵ�y(t��ng)�O(sh��)Ӌ(j��)ATmega16��Ƭ�C(j��)ܛ���O(sh��)Ӌ(j��)�֞�ɲ��֣���һ���֞��c��(sh��)�֜ضȂ�������ܛ���O(sh��)Ӌ(j��)���֣��ڶ����֞��c�������B��ܛ���O(sh��)Ӌ(j��)��
3.3.1 �ضȲɼ�ܛ���O(sh��)Ӌ(j��)�ضȲɼ�ܛ��ϵ�y(t��ng)������ʼ�������x���ض��ӳ����x���r(sh��)���ӳ���M�ɡ�
1.��ʼ������
ϵ�y(t��ng)����(d��ng)ǰ����Ҫ�M(j��n)�г�ʼ�������ʼ�����̈D��D3-11��ʾ��
�D3-11 ��ʼ���������̈D
2.�x���ض��ӳ���
�x���ض��ӳ������Ҫ�������x��RAM�е�2�ֹ�(ji��)���x���ضȵĵͰ�λ�߰�λ�����x���r(sh��)���M(j��n)��CRCУ�(y��n)��У�(y��n)���e(cu��)�r(sh��)���M(j��n)�МضȔ�(sh��)��(j��)�ĸČ�����������̈D��D3-12ʾ
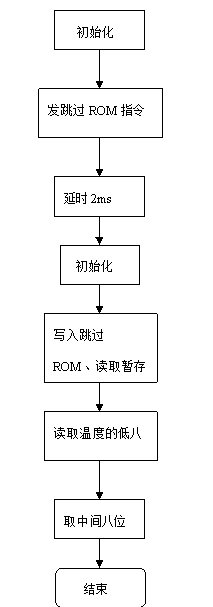
�D3-12 �x�ضȳ������̈D
3.�x���r(sh��)���ӳ���
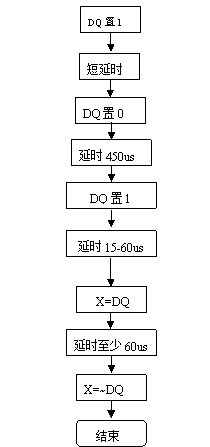
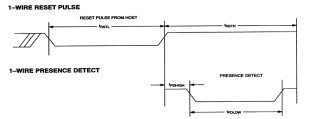
ϵ�y(t��ng)���x���r(sh��)����ӳ�����D3-13���D3-14���D3-15��ʾ��
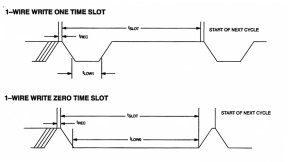
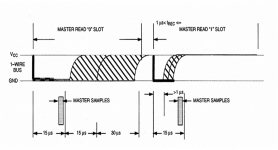
�D3-13 �x�r(sh��)��D����1��0�r(sh��)���x0��1�r(sh��)��
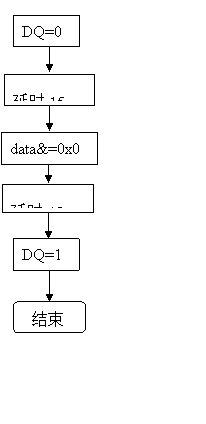
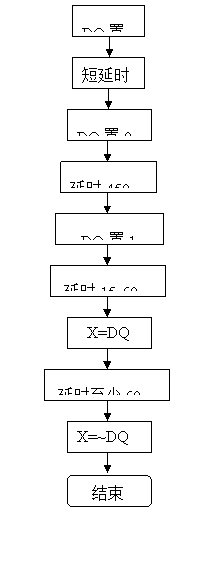
�D3-14 ���r(sh��)���ӳ������̈D �D3-15 �x�r(sh��)���ӳ������̈D
3.3.2 ����ܛ���O(sh��)Ӌ(j��)
�D3-16 UDR��ַ�D
USART �l(f��)�͔�(sh��)��(j��)���_�Ĵ�����USART ���Ք�(sh��)��(j��)���_�Ĵ���������ͬ��I/O ��ַ���Q��USART ��(sh��)��(j��)�Ĵ�����UDR����D3-16��������(sh��)��(j��)����U(xi��n)DR �r(sh��)��(sh��)�H�������ǰl(f��)�͔�(sh��)��(j��)���_������(TXB)���xUDR �r(sh��)��(sh��)�H���ص��ǽ��Ք�(sh��)��(j��)���_�Ĵ���(RXB) �ă�(n��i)�ݡ���5��6��7 �������L(zh��ng)ģʽ�£�δʹ�õĸ�λ���l(f��)�������ԣ����������t������?c��)O(sh��)�Þ�0��ֻ�Ю�(d��ng)UCSRA�Ĵ�����UDRE��(bi��o)־��λ��ſ��Ԍ�(du��)�l(f��)�;��_���M(j��n)�Ќ����������UDRE�]����λ����ô����U(xi��n)DR �Ĕ�(sh��)��(j��)��(hu��)��USART �l(f��)�������ԡ���(d��ng)��(sh��)��(j��)����l(f��)�;��_��������λ�Ĵ�����գ��l(f��)�������є�(sh��)��(j��)���d���l(f��)����λ�Ĵ�����Ȼ��(sh��)��(j��)���е؏�TxD ���_ݔ�������վ��_������һ��(g��)�ɼ�(j��)FIFO��һ�����վ��_������ַFIFO �͕�(hu��)��׃���Ġ�B(t��i)����˲�Ҫ��(du��)�@һ�惦(ch��)��Ԫʹ���x- ��- ��ָ��(SBI ��CBI)��ʹ��λ��ԃָ��(SBIC ��SBIS)�r(sh��)ҲҪС�ģ���?y��n)��@Ҳ�п��ܸ�׃FIFO �Ġ�B(t��i)��

�D3-17 UCSRA��ַ�D
UCSRA��ַ��D3-17��ʾ������ַ���x���£�
? Bit 7 �C RXC: USART ���սY(ji��)��
���վ��_������δ�x���Ĕ�(sh��)��(j��)�r(sh��)RXC ��λ����t���㡣��������ֹ�r(sh��)�����վ��_����ˢ�£���(d��o)��RXC ���㡣RXC ��(bi��o)־���Á��a(ch��n)�����սY(ji��)���Дࡣ
? Bit 6 �C TXC: USART �l(f��)�ͽY(ji��)��
�l(f��)����λ���_���еĔ�(sh��)��(j��)���ͳ����Ү�(d��ng)�l(f��)�;��_�� (UDR) ��Օr(sh��)TXC ��λ����(zh��)�аl(f��)�ͽY(ji��)���Д��r(sh��)TXC ��(bi��o)־�Ԅ�(d��ng)���㣬Ҳ����ͨ�^��1 �M(j��n)�����������TXC ��(bi��o)־���Á��a(ch��n)���l(f��)�ͽY(ji��)���Д�( Ҋ��(du��)TXCIE λ������)��
? Bit 5 �C UDRE: USART ��(sh��)��(j��)�Ĵ�����
UDRE��(bi��o)־ָ���l(f��)�;��_��(UDR)�Ƿ��(zh��n)��ý�����(sh��)��(j��)��UDRE��1�f�����_����գ��ќ�(zh��n)����M(j��n)�Д�(sh��)��(j��)���ա�UDRE��(bi��o)־���Á��a(ch��n)����(sh��)��(j��)�Ĵ������Д�(Ҋ��(du��)UDRIEλ������)����(f��)λ��UDRE ��λ�������l(f��)�����ѽ�(j��ng)�;w��
? Bit 4 �C FE: ���e(cu��)�`
������վ��_�����յ�����һ��(g��)�ַ��Ў��e(cu��)�`�������վ��_���е���һ��(g��)�ַ��ĵ�һ��(g��)ֹͣλ��0����ôFE ��λ���@һλһֱ��Чֱ�����վ��_��(UDR) ���xȡ����(d��ng)���յ���ֹͣλ��1 �r(sh��)�� FE ��(bi��o)־��0����(du��)UCSRA �M(j��n)�Ќ���r(sh��)���@һλҪ��0��
? Bit 3 �C DOR: ��(sh��)��(j��)���
��(sh��)��(j��)����r(sh��)DOR ��λ����(d��ng)���վ��_���M( �����˃ɂ�(g��)��(sh��)��(j��))��������λ�Ĵ������Д�(sh��)��(j��)�����˕r(sh��)�z�y(c��)��һ��(g��)�µ���ʼλ����(sh��)��(j��)����ͮa(ch��n)���ˡ��@һλһֱ��Чֱ�����վ��_��(UDR) ���xȡ����(du��)UCSRA �M(j��n)�Ќ���r(sh��)���@һλҪ��0��
? Bit 2 �C PE: ��żУ�(y��n)�e(cu��)�`
��(d��ng)��żУ�(y��n)ʹ��(UPM1 = 1)���ҽ��վ��_���������յ�����һ��(g��)�ַ�����żУ�(y��n)�e(cu��)�`�r(sh��)UPE ��λ���@һλһֱ��Чֱ�����վ��_�� (UDR) ���xȡ����(du��)UCSRA �M(j��n)�Ќ���r(sh��)���@һλҪ��0��
? Bit 1 �C U2X: ���ٰl(f��)��
�@һλ�H��(du��)����������Ӱ푡�ʹ��ͬ�������r(sh��)����λ���㡣��λ��1 �Ɍ������ʷ��l���ӏ�16 ����8���Ķ���Ч�Č�����ͨ��ģʽ�Ă�ݔ���ʼӱ���
? Bit 0 �C MPCM: ��̎����ͨ��ģʽ
�O(sh��)�ô�λ������(d��ng)��̎����ͨ��ģʽ��MPCM ��λ�� USART ���������յ�����Щ��������ַ��Ϣ��ݔ�뎬���������ԡ��l(f��)��������MPCM�O(sh��)�õ�Ӱ푡�Ԕ��(x��)��ϢՈ(q��ng)���� P150����̎����ͨӍģʽ�� ��

�D3-18 UCSRB��ַ�D
UCSRB��ַ��D3-18��ʾ������ַ���x���£�
? Bit 7 �C RXCIE: ���սY(ji��)���Д�ʹ��
��λ��ʹ��RXC �Дࡣ��(d��ng)RXCIE ��1��ȫ���Д���(bi��o)־λSREG ��λ�� UCSRA �Ĵ�����RXC ����1 �r(sh��)���Ԯa(ch��n)��USART ���սY(ji��)���Дࡣ
? Bit 6 �C TXCIE: �l(f��)�ͽY(ji��)���Д�ʹ��
��λ��ʹ��TXC �Дࡣ��(d��ng)TXCIE ��1��ȫ���Д���(bi��o)־λSREG ��λ��UCSRA �Ĵ�����TXC ����1 �r(sh��)���Ԯa(ch��n)��USART �l(f��)�ͽY(ji��)���Дࡣ
? Bit 5 �C UDRIE: USART ��(sh��)��(j��)�Ĵ������Д�ʹ��
��λ��ʹ��UDRE �Дࡣ��(d��ng)UDRIE ��1��ȫ���Д���(bi��o)־λSREG ��λ��UCSRA �Ĵ�����UDRE ����1 �r(sh��)���Ԯa(ch��n)��USART ��(sh��)��(j��)�Ĵ������Дࡣ
? Bit 4 �C RXEN: ����ʹ��
��λ����(d��ng)USART ��������RxD ���_��ͨ�ö˿ڹ��ܱ�USART ������ȡ������ֹ��������ˢ�½��վ��_������ʹ FE��DOR ��PE ��(bi��o)־�oЧ��
? Bit 3 �C TXEN: �l(f��)��ʹ��
��λ����(d��ng)������(d��ng)USART �l(f��)������TxD ���_��ͨ�ö˿ڹ��ܱ�USART ������ȡ����TXEN �����ֻ�еȵ����еĔ�(sh��)��(j��)�l(f��)����ɺ�l(f��)�������܉�������ֹ�����l(f��)����λ�Ĵ����c�l(f��)�;��_�Ĵ����Л]��Ҫ���͵Ĕ�(sh��)��(j��)���l(f��)������ֹ��TxD���_�֏�(f��)��ͨ��I/O���ܡ�
? Bit 2 �C UCSZ2: �ַ��L(zh��ng)��
UCSZ2�cUCSRC�Ĵ�����UCSZ1:0�Y(ji��)����һ������O(sh��)�Ô�(sh��)��(j��)���������Ĕ�(sh��)��(j��)λ��(sh��)(�ַ��L(zh��ng)��)��
? Bit 1 �C RXB8: ���Ք�(sh��)��(j��)λ 8
��(du��)9 λ���Ў��M(j��n)�в����r(sh��)��RXB8 �ǵ�9 ��(g��)��(sh��)��(j��)λ���xȡUDR �����ĵ�λ��(sh��)��(j��)֮ǰ����Ҫ�xȡRXB8��
? Bit 0 �C TXB8: �l(f��)�͔�(sh��)��(j��)λ8
��(du��)9 λ���Ў��M(j��n)�в����r(sh��)��TXB8 �ǵ�9 ��(g��)��(sh��)��(j��)λ����UDR ֮ǰ����Ҫ��(du��)���M(j��n)�Ќ�������
UCSRC�Ĵ����cUBRRH�Ĵ���������ͬ��I/O��ַ��
? Bit 15 �C URSEL: �Ĵ����x��
ͨ�^ԓλ�x���L��UCSRC �Ĵ�����UBRRH �Ĵ�������(d��ng)�xUBRRH �r(sh��)��ԓλ��0 ����(d��ng)��UBRRH �r(sh��)�� URSEL ��0��
? Bit 14:12 �C ����λ
�@Щλ�Ǟ��Ժ��ʹ�ö������ġ������c�Ժ���������ݣ���UBRRH �r(sh��)���@Щλ���㡣
? Bit 11:0 �C UBRR11:0: USART �����ʼĴ���
�@��(g��)12 λ�ļĴ���������USART �IJ�������Ϣ������UBRRH ������USART �����ʸ�4 λ��UBRRL �����˵�8 λ�������ʵĸ�׃����������M(j��n)�еĔ�(sh��)��(j��)��ݔ�ܵ��Ɖġ���UBRRL ���������²����ʷ��l����
3.3.3 �������ڳ����(n��i)�ݱ��࣬��ָ�xȡ��Ҫ���֡�
�ų�ʼ�������֣���
ATmega16 ��Ƭ�C(j��)����һ��(g��)ȫ�p����ͨ��ͬ��/���������հl(f��)ģ�KUSART��ԓ�ӿ���һ��(g��)�߶��`��Ĵ���ͨӍ�O(sh��)�䡣����Ҫ���c(di��n)���£�
���P(gu��n)�Ĵ�����
�������ꖃɷN�ӿڽM�ɡ��ʹ�õ���̖(h��o)���_��TD��RD ��SG������(ji��n)�εĴ����{(di��o)ԇֻ��Ҫ����3�l�����Ϳ����ˡ���RS232��(bi��o)��(zh��n)�У�����RD��TD������ա��l(f��)����̖(h��o)��������ؾ����s����ͨӍ�IJ����ʣ���(sh��)�F(xi��n)������̖(h��o)��ݔ��
RS-232���邀(g��)��Ӌ(j��)��C(j��)�ϵ�ͨӍ�ӿ�֮һ������ӹ��I(y��)�f(xi��)��(hu��)(Electronic Industries Association��EIA)���ƶ��Į�����ݔ��(bi��o)��(zh��n)�ӿڡ�ͨ�� RS-232 �ӿ���9��(g��)���_ (DB-9) ����25��(g��)���_ (DB-25) ���͑B(t��i)���F(xi��n)��һ�む(g��)��Ӌ(j��)��C(j��)�ϕ�(hu��)�ЃɽMRS-232�ӿڣ��քe�Q��COM1��COM2��
RS-232��(bi��o)��(zh��n)����Ǟ��h(yu��n)��ͨ���B�Ӕ�(sh��)��(j��)�K���O(sh��)��DTE��Data Terminal Equipment���c��(sh��)��(j��)ͨ���O(sh��)��DCE��Data Communication Equipment)���ƶ��ġ����͵�RS-232��̖(h��o)����ؓ(f��)�ƽ֮�g�[��(d��ng)���ڰl(f��)�͔�(sh��)��(j��)�r(sh��)���l(f��)�Ͷ��(q��)��(d��ng)��ݔ�����ƽ��+5��+15V��ؓ(f��)�ƽ��-5��-15V֮�g����(d��ng)�o��(sh��)��(j��)��ݔ�r(sh��)�����Ϟ�TTL�����_ʼ���͔�(sh��)��(j��)���Y(ji��)���������ƽ��TTL�ƽ��RS-232�ƽ�ٷ���TTL�ƽ�����������͵Ĺ����ƽ��+3��+12V�c-3��-12V֮�g��RS-232�Ǟ��c(di��n)��(du��)�c(di��n)ͨӍ���O(sh��)Ӌ(j��)�ģ����(q��)��(d��ng)��ؓ(f��)�d��3��7k��������RS-232�m�ϱ����O(sh��)��֮�g��ͨ�š�
4.3 �����ƽ�D(zhu��n)�Q�·MAX232PC �Ĵ��ڹ���TTL ��̖(h��o)��12V �ģ������҂�һ��ʹ�õ��·���ϣ��Դ��̖(h��o)�ƽ��5V �ģ��ڵ����·����3.3V �ģ������ˌ���̖(h��o)�D(zhu��n)������ã���Ҫ�����ڵ��ƽ�D(zhu��n)�Q���@һ�����·�ѽ�(j��ng)������(y��ng)�����a(ch��n)�S�������˸��N����оƬ������MAXIM ��˾��MAX232 оƬ����D4-1��ʾ�����nj�(sh��)�F(xi��n)5V �·�к�PC ��(sh��)�F(xi��n)����ͨ�ŵ��ƽ�D(zhu��n)�QоƬ����MAX323���Ԍ�(sh��)�F(xi��n)3.3V ���ƽ�D(zhu��n)�Q��
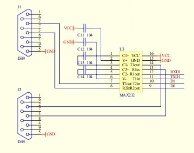
�D4-1 MAX232�·�D
���õ�RS-232C�ӿ���DB-25��DB-9�ɷN��ͣ������_�Ķ��xҲ������ͬ��PC���õ���DB-9���B������ֻ�ṩ����ͨ�ŵ�9��(g��)��̖(h��o)��DB-9���B���������_������� 4?1�͈D4-2��ʾ��
�� 4?1 DB9�ij�����̖(h��o)�_�f��
9ᘴ��ڣ�DB9�� | ||
�̖(h��o) | �����f�� | �s�� |
1 | ��(sh��)��(j��)�d���z�y(c��) | DCD |
2 | ���Ք�(sh��)��(j��) | RXD |
3 | �l(f��)�͔�(sh��)��(j��) | TXD |
4 | ��(sh��)��(j��)�K�˜�(zh��n)�� | DTR |
5 | ��̖(h��o)�� | GND |
6 | ��(sh��)��(j��)�O(sh��)���(zh��n)��� | DSR |
7 | Ո(q��ng)��l(f��)�� | RTS |
8 | ����l(f��)�� | CTS |
9 | ���ָʾ | DELL |
��鳣�õ��������ƽӷ������ء����Ք�(sh��)��(j��)�Ͱl(f��)�͔�(sh��)��(j��)���_�B�ӡ������еĴ��ڵ��·��D 4?3��ʾ��
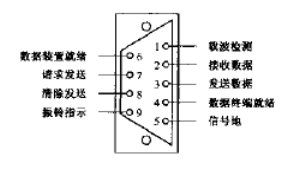
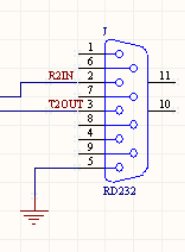
�D 4?2 DB9�����_���x�D �D 4?3 ���ڵ��B���·
5 �о����Y(ji��)��Փ�������˻��چ�Ƭ�C(j��)�ĜضȲɼ�ϵ�y(t��ng)�O(sh��)Ӌ(j��)�������˲ɼ���̖(h��o)����Ƭ�C(j��)̎����K���C(j��)���Ք�(sh��)��(j��)�Č�(sh��)�F(xi��n)�^�̣������о��ˌ�(sh��)�F(xi��n)�ķ��������·�����O(sh��)Ӌ(j��)���^�̵�Ӳ���·��
��1����B���n�}�Д�(sh��)��ʽ�ضȂ������͆�Ƭ�C(j��)���о���������vʷ�l(f��)չ���Լ��������(g��u)���ԭ����
��2���·�ĽY(ji��)��(g��u)�ɔ�(sh��)��ʽ�ضȂ���������Ƭ�C(j��)�ȽM�ɣ���Ч�Č������Y(ji��)���Ǵ˴��O(sh��)Ӌ(j��)���y̎�����c(di��n)��
��3����ϵ�y(t��ng)�У��C(j��)�Ľ��ճ�����Ҫ�Ǵ���ͨ�ŵ��O(sh��)Ӌ(j��)��
���n�}���о��У��Ҳ���˸��N�Y�ϣ��ڌ�(d��o)���Ď����£�Ŭ������˔�(sh��)��(j��)�ɼ��ľ��ȡ������ڕr(sh��)�g������������(j��ng)�(y��n)���ޣ����n�}���о����ڲ���֮̎�����y�⣬�ڽ��Ĺ��������M(j��n)һ�����M(j��n)�����ơ��������Ժ�Ĺ������Ҍ���(hu��)��(du��)��Ƭ�C(j��)��ݔ��ݔ���ӿ��M(j��n)�и���һ�����о����Ķ������@��(g��)�O(sh��)Ӌ(j��)������
���I(y��)�O(sh��)Ӌ(j��)�K������ˣ��mȻ�f���^�̱��^�ۣ����Ұl(f��)�F(xi��n)����(du��)�Լ�߀�Ǻ��Ў����ģ������f�˱��^�У���Ը���(d��ng)��ƽ�r(sh��)֪�R(sh��)Ҳ������(sh��)�������O(sh��)Ӌ(j��)�^���������Լ������Ć��}�sֻ����������������ھW(w��ng)��Ū����𰸡�
ͨ�^�@�ή��I(y��)�O(sh��)Ӌ(j��)ʹ���������Լ�ԭ��֪�R(sh��)߀���^Ƿȱ���Լ�Ҫ�W(xu��)��(x��)�Ė|��߀̫�࣬��ǰ�����X���Լ�ʲô�|������(hu��)��ʲô�|�����������c(di��n)�۸��ֵ͡�ͨ�^�@�ή��I(y��)�O(sh��)Ӌ(j��)���Ҳ����W(xu��)��(x��)��һ��(g��)�L(zh��ng)�ڷe�۵��^�̣����Ժ�Ĺ����������ж���(y��ng)ԓ����ČW(xu��)��(x��)��Ŭ������Լ�֪�R(sh��)�;C�����|(zh��)��
��֮�����܌W(xu��)��(hu��)��߀�njW(xu��)����(hu��)�ĵĴ_�X�����y���^�࣬�����f���_�^�y����֪��������֡����K���������зN�����ؓ(f��)�ĸ��X�����⣬߀�ó�һ��(g��)�Y(ji��)Փ��֪�R(sh��)���ͨ�^��(y��ng)�ò��܌�(sh��)�F(xi��n)��r(ji��)ֵ����Щ�|���Ԟ�W(xu��)��(hu��)�ˣ����������õĕr(sh��)��Űl(f��)�F(xi��n)�ǃɻ��£��������J(r��n)��ֻ�е�������(hu��)�õĕr(sh��)�������ČW(xu��)��(hu��)�ˡ�
����ARM��Ƭ�C(j��)�P(gu��n)�ڈD��ɼ��ڬF(xi��n)��(ch��ng)�ɾ����T��е��O(sh��)Ӌ(j��)
ժҪ
�@ƪՓ��ȫ���չʾ��ARM7��Ƭ�C(j��)�������_�l(f��)�ĬF(xi��n)��(ch��ng)�ɾ����T��й�������������O(sh��)Ӌ(j��)�؏�(f��)���ӽM�B(t��i)ָ���ϵ�y(t��ng)�(y��n)�C�ģ���(d��ng)�r(sh��)�@ARM7�c���a(b��)����������댧(d��o)�w�B���M(j��n)�ЈD��ɼ��͈D��̎���Ԫ��IPU����(sh��)ʩ�������F(xi��n)��(ch��ng)�ɾ����T��й������ϣ��F(xi��n)��ARM7���@�ɞ�һ��(g��)�D��̎���Ԫ�Ć�Ƭ�C(j��)���D��̎���Ԫ�����ˈD��ɼ������e�������ڬF(xi��n)��(ch��ng)�ɾ����T����ψ�(zh��)��3�A��ˮ�������ܼӿ�ϵ�y(t��ng)�\(y��n)�У����e�������������M(j��n)һ���^�V���̶��D�����Ͱ�������ڻ��a(b��)����������댧(d��o)�w�D�������������(d��o)�¸��õĈD���|(zh��)������ARM7��Ƭ�C(j��)�ĬF(xi��n)��(ch��ng)�ɾ����T��а�͈D��̎���Ԫ�������ڽ̌W(xu��)����̎�����O(sh��)Ӌ(j��)���������O(sh��)Ӌ(j��)��ϵ�y(t��ng)�ξ�Ƭ�O(sh��)Ӌ(j��)���ԏ����е��·��һ��(g��)��һ�ĬF(xi��n)��(ch��ng)�ɾ����T����оƬ
1��ԭ����(ji��n)��
�@ƪՓ���@ʾ��һ��(g��)ARM7[1,2,3,4]������̎�����ڬF(xi��n)��(ch��ng)�ɾ����T��й�����������α��O(sh��)Ӌ(j��)�ɿ������؏�(f��)�M�B(t��i)ָ��ͱ��y(c��)ԇ�ģ�Ȼ��ARM7��Ƭ�C(j��)�c���a(b��)����������댧(d��o)�w朽��������F(xi��n)��(ch��ng)�ɾ����T��й��������M(j��n)�ЈD��ɼ����O(sh��)�䌍(sh��)ʩ�^�̣��F(xi��n)��ARM7�ѽ�(j��ng)�ɞ�һ��(g��)�ЈD��ɼ����\(y��n)�І�Ԫ�Ć�Ƭ�C(j��)���Еr(sh��)���҂�����Q�������\(y��n)�D(zhu��n)�ļ�������ARM7���������^5��(g��)��ָ��M�����M(j��n)�Д�(sh��)��(j��)̎������(sh��)��(j��)��֧����(sh��)��(j��)�D(zhu��n)�ƺͅf(xi��)��̎������ǰ����(g��)ָ��M���O(sh��)Ӌ(j��)���(y��n)�Cϵ�y(t��ng)���Á�������2-4���֣��F(xi��n)��(ch��ng)�ɾ����T��ЈD������������ĈD��ɼ��㷨ͨ������8051ϵ��CPU����ɣ�����5����ϵ�y(t��ng)�ξ��w���O(sh��)���(y��n)�C��(d��o)��ARM7����һ��(g��)�D����ٵĽ�������������ĽY(ji��)Փ���������ڲ���6��
�˂�ͨ����Ϥ�\(y��n)�õ�����̎��������8051.80*86��ARM��MIPSϵ�еȣ����Ǻ������뵽ȥ��������������2��3�������؏�(f��)���Ӹ���ĽM�B(t��i)ָ�������ARM7������̎�����еķ�ʽ��
�ԏ�����̎�����·���Ա����ӣ���Ҳ��������һЩ�o�õĽM�B(t��i)���sС�F(xi��n)��(ch��ng)�ɾ����T��е��O(sh��)Ӌ(j��)�����Ԙ�(g��u)�����Ƶ�ARM��Ƭ�C(j��)�ڬF(xi��n)��(ch��ng)�ɾ����T��е�����̎���������ij�(xi��ng)���w�đ�(y��ng)������ȫ���ܵġ�
2��ARM7ϵ�y(t��ng)����
�D1�@ʾ��ARM7ϵ�y(t��ng)����һ��(g��)�Ĵ�����REG������16-32λ�Ĵ�������(n��i)�棨MEM������(sh��)��(j��)̎���Ԫ��DTU�������Ɔ�Ԫ��CON����M����ϵ�y(t��ng)�IJ������С��D1ͬ��Ҳ�@ʾ��(sh��)��(j��)ͨ���@�Ă�(g��)��λ֮�g�Ĉ�(zh��)��ָ��28��(g��)����̎������������4λ�O(sh��)Ӌ(j��)�l���a�l��������l���Oֵ�Ƕ��M(j��n)�Ƶ�ָ�(sh��)�Ϳ��ܰ���4*28=112�����˺�(ji��n)�α��^Ԕ��(x��)������̎�����͛]���@ʾ���@��һ��(g��)��ͨ�ĽM���·�M�ɵ�һ��(g��)���g(sh��)�c߉���Ɔ�Ԫ����һ��(g��)��λ����һ��(g��)�ۼ�����
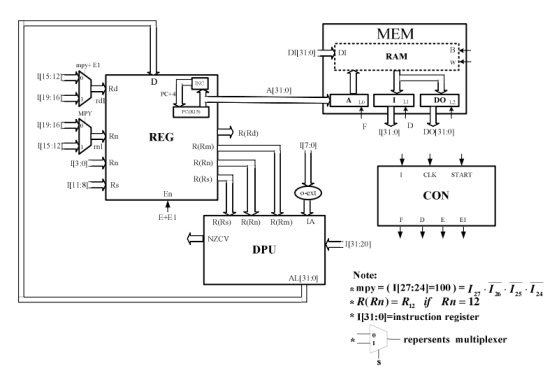 �D1��ARM7ϵ�y(t��ng)���õ�28��(g��)����̎����ָ��
�D1��ARM7ϵ�y(t��ng)���õ�28��(g��)����̎����ָ��
3���a(b��)���֧�͔�(sh��)��(j��)�D(zhu��n)��ָ��Ϳ��Ɔ�Ԫ
3.1����֧�͔�(sh��)��(j��)��ݔ�·
�D2�@ʾԭ����D�Д�(sh��)��(j��)ͨ���Ϳ��Ɣ�(sh��)��(j��)�����ӷ�֧�͔�(sh��)��(j��)�D(zhu��n)��ָ��M���D2�͈D1��ȣ����������ď�(f��)�s�Կ��l(f��)�F(xi��n)��(sh��)��(j��)ͨ���Y(ji��)��(g��u)����·ݔ������̎�������g�ӌ�ַ�Ϳ��Ɔ�Ԫ��CON�����D2��4���صĿ���rd2��m2��ݔ���ɂ�(g��)�˷����Á��B��rd��rn�Č�ַ�Ĵ�����ݔ��ăɂ�(g��)��·�D(zhu��n)�Q�����˺�(ji��n)�Λ]���@ʾ��
��ָ֧�����ڸ�׃����Ĉ�(zh��)�����У�ͨ����ͨ�^��׃����Ӌ(j��)��(sh��)����ֵ����ɵģ���(sh��)��(j��)����ָ���漰����(g��)�Ͷ���(g��)֮�g�Ĕ�(sh��)��(j��)��ݔ�ʹ惦(ch��)��Ĵ�����D2��ʾ���@��(g��)�D2�л��c(di��n)��DO�����Ĵ惦(ch��)�����Ĵ�����D�˿ں������c(di��n)��R�����ļĴ����K��������Ϣ��D�˿��Ǟ��˔�(sh��)��(j��)��ݔ?sh��)�Ŀ�Ķ������ӵġ?/p>
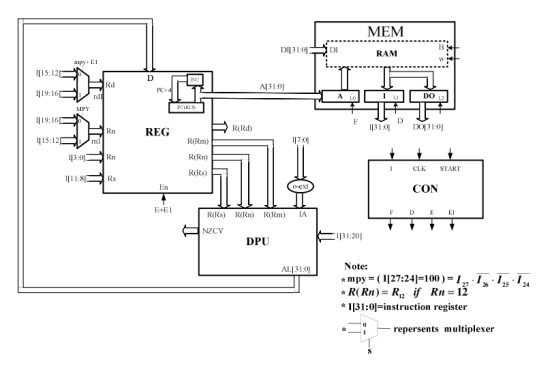 �D2��ARM7��D������֧����(sh��)��(j��)�D(zhu��n)�ƺ�����̎����ָ��
�D2��ARM7��D������֧����(sh��)��(j��)�D(zhu��n)�ƺ�����̎����ָ��
3.2�����Ɔ�Ԫ
��(d��ng)�����ָ������M(j��n)ϵ�y(t��ng)�����Ɔ�Ԫ��׃��Խ��Խ����͏�(f��)�s���ڈD2���½���Ŀ��Ɔ�Ԫ�бȈD1�����ݔ���ݔ���ˣ����Ɔ�Ԫ��(sh��)�H����һ�N���ޠ�B(t��i)�C(j��)����(sh��)�F(xi��n)��ʽ�@ʾ�ڈD3�Ġ�B(t��i)�D�У�����ARM7�е�ָ���ڈ�(zh��)���^����ֻ������(g��)��B(t��i)��Ҳ����ȡ�aF����aD�͈�(zh��)��E���L(zh��ng)�˷���64λ�Įa(ch��n)Ʒ���ͷ�֧�B�ӣ�bl��ָ����Ե���Ҫ�~���E1��E2��B(t��i)����(sh��)��(j��)��ݔ�������d�̓�(ch��)���wϵ�Y(ji��)��(g��u)��ls��������d�̓�(ch��)���wϵ�Y(ji��)��(g��u)��mls������Ҫ�~��Ġ�B(t��i)F1��F2�����Կ��Ɔ�Ԫ��ݔ��K�ǽ�aָ����̖(h��o)��l��bl��ls��mls������������ct��������(g��)�^��Ӌ(j��)��(sh��)��ݔ���K�Ġ�B(t��i)��F��F1��F2��D��E��E1��E2��D3�Ŵ�D������x��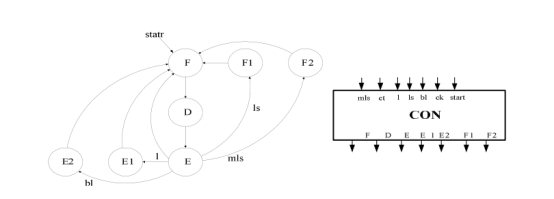
�D3�����Ɔ�Ԫ�D�͏ĈD2��D�U(ku��)��Ŀ��Ɔ�Ԫģ�K
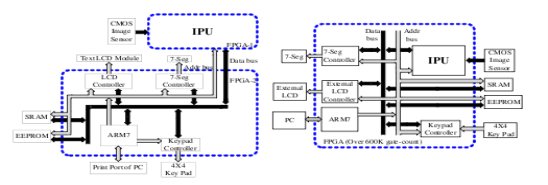
4��������չʾƽ�_(t��i)
�D4�@ʾ�������_�l(f��)�ĬF(xi��n)��(ch��ng)�ɾ����T��й������ṩ��80�f�T��(sh��)ِ�`˼��˾�F(xi��n)��(ch��ng)�ɾ����T���оƬ��xcv800���������У�ARM7��ÿ36��(g��)ָʾ�ͱ��(y��n)�C���ڹ������ׂ�(g��)���������x�����g(sh��)�\(y��n)���Ӌ(j��)��(sh��)�����I���M(j��n)���(y��n)�C���D5�@ʾ�˹��������\(y��n)��һ��(g��)ͨ�^�I�Pݔ���24С�r(sh��)�r(sh��)�g���������½����ȫ��24С�r(sh��)�r(sh��)��·ͨ�^���нӿڶ��b�M(j��n)�F(xi��n)��(ch��ng)�ɾ����T���оƬ���@7���@ʾ��030903�džΎ��ɼ���3С�r(sh��)9���3��r(sh��)�@��(g��)24С�r(sh��)�r(sh��)犳����_ʼ�\(y��n)�С�
 �D4�����ƹ���ƽ�_(t��i) �D5�����ƹ���ƽ�_(t��i)�Ύ��ɼ�03:09:03�ڳ����\(y��n)����
�D4�����ƹ���ƽ�_(t��i) �D5�����ƹ���ƽ�_(t��i)�Ύ��ɼ�03:09:03�ڳ����\(y��n)����
�ڶ����ֵ����IJ��ֺ�(ji��n)Ҫ��B��ͨ�^���ӽM�B(t��i)ָ����O(sh��)Ӌ(j��)�������(y��n)�C�҂���ARM7̎��������Ŀǰ��ֹ���@��(g��)�����ܹ��ã������^�m(x��)����Խ��Խ���ָ��M�������ڽ����Ķ�������c(di��n)����ARM7̎�����ӿڵđ�(y��ng)���ڈD��ɼ���̎���Ԫ��IPU��[5]����(zh��)����300KӋ(j��)��(sh��)�ĬF(xi��n)��(ch��ng)�ɾ����T���оƬ��xc2s300e����
5������ARM7��Ƭ�C(j��)������SoC�O(sh��)Ӌ(j��)
 �D��̎���Ԫ��IPU�������D��ɼ������S���e�Ͷ��S����Ӱ��ɼ���һ��(g��)�����_�l(f��)�Ļ��ڬF(xi��n)��(ch��ng)�ɾ����T��е�8051ܛ�������S���e�Ͷ��S�����ǻ��ڬF(xi��n)��(ch��ng)�ɾ����T��а汾�ĈD��̎���㷨���քe��Crookes��Maheshwari��
�D��̎���Ԫ��IPU�������D��ɼ������S���e�Ͷ��S����Ӱ��ɼ���һ��(g��)�����_�l(f��)�Ļ��ڬF(xi��n)��(ch��ng)�ɾ����T��е�8051ܛ�������S���e�Ͷ��S�����ǻ��ڬF(xi��n)��(ch��ng)�ɾ����T��а汾�ĈD��̎���㷨���քe��Crookes��Maheshwari��
�D6��a.ARM7��IPU�ڲ�ͬ�ĬF(xi��n)��(ch��ng)�ɾ����T��й������ϡ�
b.ARM7��IPU�ϲ���һ��(g��)��һ�ĬF(xi��n)��(ch��ng)�ɾ����T���оƬ��
�D7�����ȵ���Ƭͨ�^�@��(g��)��(sh��)�(y��n)
�ɼ������e��������ͨ������ϵ����ʽ���F(xi��n)�ڌ�����������һ��(g��)��һ�ĬF(xi��n)��(ch��ng)�ɾ����T���оƬ�С��D��̎���Ԫ�F(xi��n)���܉��B�ӵ������_�l(f��)��ARM7��Ƭ�C(j��)�У��@ʾ��D6a���D7�@ʾ��(sh��)�(y��n)�Y(ji��)���������ȵ���Ƭ����ԭʼ�D����ʹ�ÈD6a��ARM7��Ƭ�C(j��)��(zh��)��600kӋ(j��)��(sh��)��һ��(g��)����(sh��)��800K��Ӌ(j��)��(sh��)�F(xi��n)��(ch��ng)�ɾ����T���-2оƬ��IPUʹ��һ��(g��)300KӋ(j��)��(sh��)�ĬF(xi��n)��(ch��ng)�ɾ����T���-1оƬ���(zh��)��70KӋ(j��)��(sh��)�����Ժϲ��@�ɂ�(g��)���ڈ�(zh��)�еĬF(xi��n)��(ch��ng)�ɾ����T���оƬ��ͬһ��(g��)IPU800KоƬ����D6A��ʾ���@�N�O(sh��)Ӌ(j��)ģʽ���ɞ�һ�NƬ��ϵ�y(t��ng)�O(sh��)Ӌ(j��)�ĬF(xi��n)��(ch��ng)�ɾ����T��еİ汾��
6���Y(ji��)���Z
��?y��n)�F(xi��n)��(ch��ng)�ɾ����T����ǿ�������(g��u)������ĽY(ji��)��(g��u)��Ƭ�C(j��)�Ǟ��˽o����̎�������������������ԝM���m���ض�����;�����磬�ٶ�һ��(g��)800k�F(xi��n)��(ch��ng)�ɾ����T���оƬ�·��ȫ��ARM7�������]�������g���t��������һ��(g��)70k���g(sh��)�ļ������Ƅ�(d��ng)����?y��n)������?j��)���ڈD��̎����ɈD��������·��Ȼ����������ȡ���e�õ�32*32�˔�(sh��)��ռ���g�����_(d��)��150k���ҵ�Ӌ(j��)��(sh��)��ͬ�r(sh��)���C���g���Եõ�70kӋ(j��)��(sh��)�D��������ܱ����������档
Ƕ��ʽARM7�c�S���O(sh��)��������ڬF(xi��n)��(ch��ng)�ɾ����T���оƬ�ϣ��@ʾ��D6B��̓���^(q��)���(n��i)������ʾ��һ�NƬ��ϵ�y(t��ng)��ϵ�y(t��ng)�����O(sh��)Ӌ(j��)�������ܕ�(hu��)��u�ɞ�һ�Nƽ�_(t��i)�܉���������̎�����O(sh��)Ӌ(j��)�Ŀ������Ŀ����e���������B���O(sh��)�䣬��D��̎�����C(j��)�һ�w�����{��W(xu��)�ȸ��N���g(sh��)��
ԭ���f���ă�(n��i)���ǣ� �g�ĵ�����ԭ��
�}����ARM Based Microcontroller for Image Capturing in FPGA Design
���ߣ�Chi-Jeng Chang, Wu-Ting Wu, Hui-Ching Su, Zen-Yi Huang, and Hsin-Yen Li
��Դ��ISVC 2005, LNCS 3804, PP. 672-677, 2005.

ȫ���Y��51hei���d��ַ(word��ʽՓ��)��
 ���چ�Ƭ�C(j��)�ĜضȲɼ�ϵ�y(t��ng)�O(sh��)Ӌ(j��).zip
(2.22 MB, ���d��(sh��): 22)
���چ�Ƭ�C(j��)�ĜضȲɼ�ϵ�y(t��ng)�O(sh��)Ӌ(j��).zip
(2.22 MB, ���d��(sh��): 22)
| �gӭ���R (http://www.raoushi.com/bbs/) | Powered by Discuz! X3.1 |