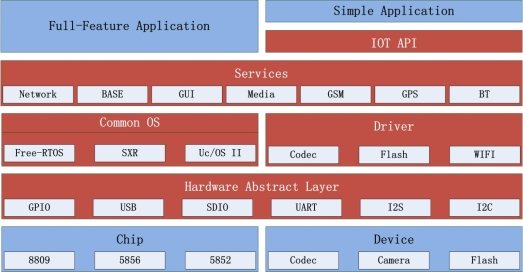
EZ-Link��RDA��(li��n)�W(w��ng)��(y��ng)�ü����_(k��i)�l(f��)ƽ�_(t��i)��ԓƽ�_(t��i)����SDK�_(k��i)�l(f��)����Eclipse�����_(k��i)�l(f��)�h(hu��n)�����{(di��o)ԇ���ߺ͟�䛹��ߡ�SDK�_(k��i)�l(f��)���ṩ����EZ-Linkƽ�_(t��i)�M(j��n)����(li��n)�W(w��ng)�_(k��i)�l(f��)�����ģ�K�͘�(bi��o)��(zh��n)API�ӿڣ�ͬ�r(sh��)ͨ�^(gu��)��(du��)Ӳ���ӳ����ṩ��(du��)RDA��(li��n)�W(w��ng)ϵ��оƬ��ȫ��֧�֡�
RDA��(li��n)�W(w��ng)ϵ��оƬ���Ъ�(d��)���{(l��n)����WIFIоƬ��Ҳ����SoC�ϼ���Wi-Fi��Bluetooth��GSM���ܵĽM��оƬ,���ṩ����UART/ADC/I2S�ڃ�(n��i)��Ӳ���ӿڡ�
RDA���еĹ��漼�g(sh��)ʹ�Ñ�(h��)���Ԫ�(d��)������ʹ��Wi-Fi���{(l��n)�����ܡ�
�����U��EZ-Linkƽ�_(t��i)SDK����Ҫ���ܺ�ʹ�÷���������������SDK�龫��(ji��n)�棬ԓ�汾ᘌ�(du��)��(li��n)�W(w��ng)�O(sh��)���_(k��i)�l(f��)���ڶ̡��Ј�(ch��ng)����(y��ng)���е����c(di��n)����(du��)EZ-Link SDK�M(j��n)����һϵ�Ѓ�(y��u)������(j��)���Ԏ����͑�(h��)����_(k��i)�l(f��)Ч�ʡ��Ñ�(h��)�H��Ҫ�˽��Ҫ�Ľӿڣ�Ȼ��ͨ�^(gu��)SDK�ṩ���S��ʾ�����a����(ji��n)�����������ľͿ��Ԍ�(sh��)�F(xi��n)һ����������(li��n)�W(w��ng)��(y��ng)�á�
1.1 PCB�O(sh��)Ӌ(j��)Ӳ���� |
Ӳ������� |
�(q��)��(d��ng)�Ͳ���ϵ�y(t��ng)�� |
����(w��)�� |
��(y��ng)��?q��)?/strong> |
оƬģ�K�� | RDA оƬ�鱾SDK�O(sh��)Ӌ(j��)���յĺ��ģ�оƬ�(l��i)�͛Q��ϵ�y(t��ng)��CPUӲ���ܘ�(g��u)��IO�ӿڡ����������ԣ��M(j��n)��Ӱ푷���(w��)���ṩ�ķ���(w��)���a(ch��n)Ʒ���Ժ�Դ�a���g�ȡ�оƬģ�K��ʹ�Ñ�(h��)�ڟo(w��)�����ό�ܛ������r�£�����(j��)�����x���m��(d��ng)?sh��)�о�?/div> |
����ϵ�y(t��ng)ģ�K�� | Ŀǰ������Ƕ��ʽ��(sh��)�r(sh��)����ϵ�y(t��ng)�N�(l��i)���࣬�Ñ�(h��)���Ը���(j��)�Լ���ƫ�ú�ʹ����(x��)�T�x�����ϵ�y(t��ng)����Ӱ�������(y��ng)�� |
�(q��)��(d��ng)ģ�K�� | �Ñ�(h��)ͨ���и��Q���O(sh��)�������(q��)��(d��ng)ģ�K�����ǝM(m��n)��ԓ�(xi��ng)���� |
����(w��)ģ�K�� | ����(w��)��ģ�K������Ч�p�ٸ���(g��)��ģ�K֮�g��ϣ������Ñ�(h��)�h�p�c�ض��a(ch��n)Ʒ�o(w��)�P(gu��n)����(w��)�������·���(w��) |
���� |
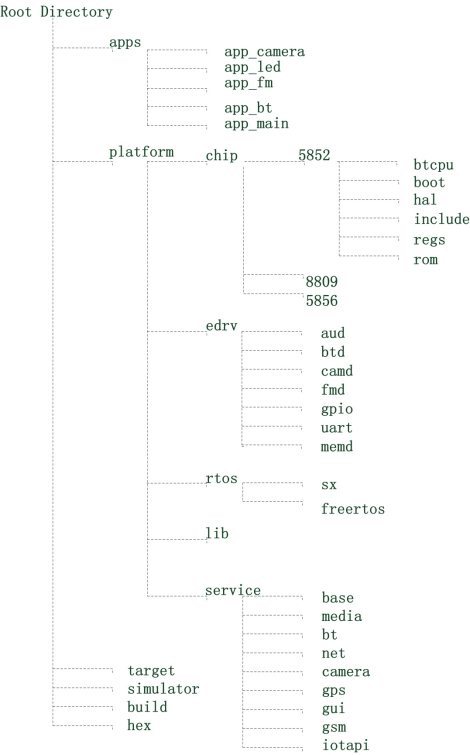
SDKԴ�aĿ䛽Y(ji��)��(g��u) |
Ŀ� | �f(shu��)�� | |
apps | �͑�(h��)��(y��ng)�ó����RDAʾ�����a | |
platform | RDA IOTƽ�_(t��i)���a�����°�����chip��edrv�� rtos�� service����Ŀ䛣���Ŀ䛕�(hu��)�����������f(shu��)�� | |
chip | ƽ�_(t��i)оƬ���P(gu��n)���a��������boot loader��hal�ӣ��Ĵ�����ַ���x��rom���a��ͨ���Ñ�(h��)�o(w��)����rom���a | |
edrv | �������O(sh��)�(q��)��(d��ng)��оƬ��(n��i)�(q��)��(d��ng)�����O(sh��)�(q��)��(d��ng)������LCD��F(xi��n)M�ȣ�оƬ��(n��i)���(q��)��(d��ng)���(n��i)�������(q��)��(d��ng)����GPIO��UART�� | |
rtos | ��(sh��)�r(sh��)����ϵ�y(t��ng)�ӣ�ԓĿ䛰���ԭ������ϵ�y(t��ng) | |
service | base | ���A(ch��)����(w��)������RTOS������ |
net | �W(w��ng)�j(lu��)����(w��)���ṩhttp��lwna��tcp/ip�����ӿ� | |
bt | �{(l��n)������(w��) | |
camera | �ṩ���C(j��)�����ӿ� | |
gps | �ṩGPS��λ����(w��) | |
gui | �Ñ�(h��)��������ӿ� | |
gsm | GSM/GPRS��������(w��)�ӿ� | |
media | ���l��ҕ�l����(w��)�ӿڵ� | |
iotapi | ��(ji��n)��iot��(y��ng)�ó��̽ӿ� | |
target | �Ñ�(h��)�a(ch��n)Ʒ�����ļ� | |
build | Ӱ��Ŀ䛣�ԓĿ��ھ��g�r(sh��)�ɾ��g�_�����ɣ��Á�(l��i)��ž��g�^(gu��)�������ɵ��R�r(sh��)�ļ� | |
lib | ģ�K�o�B(t��i)�B�ӎ�(k��) | |
hex | Lod�ļ���Ramrun�ļ�������GDB���P(gu��n)asm��map�ļ� | |
�����ļ� | �f(shu��)�� |
target.def | �a(ch��n)Ʒ���ã�target��ʾ�a(ch��n)Ʒ���_(k��i)�l(f��)�� |
target_common.def | ��(du��)target.def��Ϣ�ļ���̎����ͨ������Ҫ�Ñ�(h��)�� |
memd.def | Flash���Զ��x |
tgt_app_cfg.h | �Ñ�(h��)���ܺ��^�ļ��������Ñ�(h��)APP���� �ļ�����./target/include |
tgt_board_cfg.h | Ӳ����·������ �ļ�����./target/include |
tgt_calib_cfg.h | У��(zh��n)���� �ļ�����./target/include |
�x�(xi��ng) | �f(shu��)�� | |
оƬ������Ϣ | ���xоƬ�(l��i)�ͺͷ��b | |
�|���(q��)��(d��ng) | ���x�|���O(sh��)�� | |
FM�(q��)��(d��ng) | ���xFM�����͕r(sh��)犹��_ | |
FLASH�(q��)��(d��ng) | ���xFLASH�(l��i)�͡��r(sh��)犼�ADMUX | |
LCD�(q��)��(d��ng) | ���xLCD���� | |
CAMERA�(q��)��(d��ng) | �Ƿ�֧��CAMERA�����N���� | |
�{(l��n)���(q��)��(d��ng) | ���x�{(l��n)��ģ�K�(l��i)�ͣ�32K�r(sh��)犹��_��UART?j��ng)?/div> | |
T���(q��)��(d��ng) | ���xT���ӿ��(l��i)�� | |
���l�(q��)��(d��ng) | ���x���l�O(sh��)�� | |
WIFI�(q��)��(d��ng) | ���xWIFI 32K�r(sh��)犹��_��TCP/IP֧�֣�SDIO��GPIO��SDMMC�ӿ�֧�֣�DLNA�ӿ�֧�֣�WIFI����֧�� | |
32K�r(sh��)����� | ���Õr(sh��)� | |
�Ñ�(h��)�(xi��ng)Ŀ���x | APP_BASEDIR | �͑�(h��)APPĿ� |
CT_PROJECT | ���x�YԴ�(l��i)�� | |
AUD_MAX_LEVEL | ���x���� | |
RESOURCE_SUPPORT | �Ƿ�����YԴ | |
AT_SUPPORT | �Ƿ�֧��AT���� | |
BT_SPP | �Ƿ�֧���{(l��n)��SPP | |
USB֧���(l��i)�� | �Ƿ�֧��USB���䣻USB HOST | |
���g��(y��u)���x�(xi��ng) | CT_OPT����(y��u)�����g���g WITHOUT_WERROR���澯�Ƿ�ֹͣ���g | |
�{(di��o)ԇ�x�(xi��ng) | TRACE�����x�(xi��ng)�� | |
Eclipse��JRE��Jave Run Environment���x��32λ�汾�����Լ���64��32λ����ϵ�y(t��ng) |
���bEclipse |
��(chu��ng)������ |

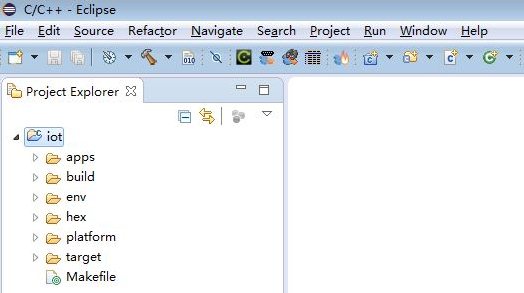
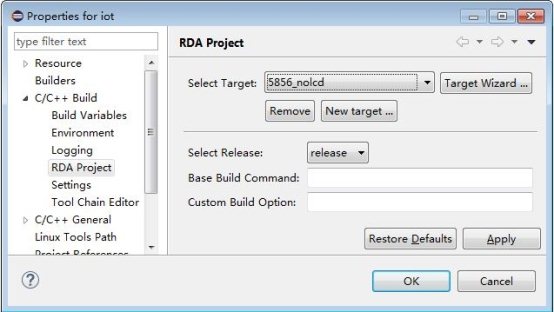
�������� |
Select Target | �x��Ŀ��(bi��o)Target |
Target Wizard | �(xi��ng)Ŀ��?q��)��������?xi��ng)Ŀ���ԡ�ģ�K�� |
Remove | �h��Target |
New Target | �½�Target |
Select Release | �x�����ɡ�release��߀�ǡ�debug���汾 |
Base Build Command | - |
Custom Build Option | - |
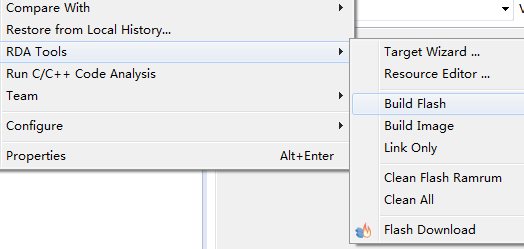
���g���� |
Build Flash | ���gRamrun�ļ� |
Build Image | ���gFlash�ļ� |
���gģ�K |
Build this module | ���gԓģ�K |
Clean this module | ���ģ�K�Ѿ��g���g�ļ� |

�Ñ�(h��)ģ�K�M���Y(ji��)��(g��u) |
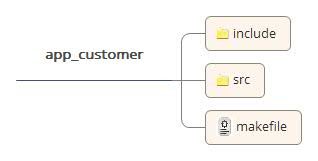
Makefile��ʽ |
## ----------------------------------------------------------- ## ## Don't touch the next line unless you know what you're doing.## ## ----------------------------------------------------------- ## include ${SOFT_WORKDIR}/env/compilation/compilevars.mk # Name of the module LOCAL_NAME := apps/ap_customer # list all modules APIs that are neccessary to compile this module LOCAL_API_DEPENDS := \ platform \ platform/service \ ## ----------------------------------------------------------- ## ## List all your sources here ## ## ----------------------------------------------------------- ## include src/make.srcs ## ----------------------------------------------------------- ## ## Do Not touch below this line ## ## ----------------------------------------------------------- ## include ${SOFT_WORKDIR}/env/compilation/compilerules.mk |
���b�����(q��)��(d��ng) |

���� |

Eclipse��������lĿ |
Reset Target | ����Ŀ��(bi��o)�壬Ŀ��(bi��o)�匢�؆� |
Connect Target | �B��Ŀ��(bi��o)�壬�ɹ�ʧ������(hu��)�Џ�����(du��)Ԓ����ʾ |
Open Coolwatcher | ���_(k��i)CoolWatcher���� |
Open Memory View | ���_(k��i)��(n��i)���x��(xi��)���ڣ�ԓ������2.6 �{(di��o)���н�B |
Down Flash | ���dRamrun ��Flash �ļ� |
���BIN�ļ� |
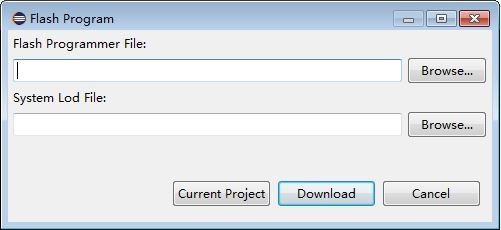
Flash Programmer File�ļ���build flash�a(ch��n)�� System Lod File�ļ���build image�a(ch��n)��������2.3 IDE���� |

���������� | �����(n��i)��, glibc���� | |||
����(sh��)�� | PVOID iot_Malloc(UINT32 size) | |||
����(sh��)�� | ||||
��ݔ�롿 | size | ��Ո(q��ng)��(n��i)���С | ||
����ֵ�� | ָ������(n��i)���ָ� | |||
���������� | ጷŃ�(n��i)��, glibc���� | |||
����(sh��)�� | VOID iot_Free(PVOID ptr) | |||
����(sh��)�� | ||||
��ݔ�롿 | ptr | ��(n��i)��ָ� | ||
����ֵ�� | �o(w��) | |||
���������� | ��ӡtrace��ʾ����ӡLED����B(t��i)�� | |||
iotPrintf("led status = %d ", ledOn); | ||||
����(sh��)�� | VOID iot_Printf(INT8* fmt,...) | |||
����(sh��)�� | ||||
��ݔ�롿 | fmt | ��ӡ��ʽ | ||
����ֵ�� | �o(w��) | |||
���������� | �����ӕr(sh��) | |||
����(sh��)�� | VOID iot_delayMs(UIN32 ms) | |||
����(sh��)�� | ||||
��ݔ�롿 | ms | �ӕr(sh��)ms���� | ||
����ֵ�� | �o(w��) | |||
���������� | �����ӕr(sh��) | |||
����(sh��)�� | VOID iot_DelaySeconds( UINT32 seconds) | |||
����(sh��)�� | ||||
��ݔ�롿 | secondes | ���r(sh��)���r(sh��)�L(zh��ng)��������λ | ||
����ֵ�� | �o(w��) | |||
���������� | ���_(k��i)UART�ӿ� | |||
����(sh��)�� | VOID uart_Open(UINT8 id, UINT32 baudrate) | |||
����(sh��)�� | ||||
��ݔ�롿 | id | Uart ID | ||
��ݔ�롿 | baudrate | Uart ������ | ||
����ֵ�� | �o(w��) | |||
���������� | �P(gu��n)�]UART�ӿ� | |||
����(sh��)�� | VOID uart_Close(UINT8 id); | |||
����(sh��)�� | ||||
��ݔ�롿 | id | |||
����ֵ�� | �o(w��) | |||
���������� | ͨ�^(gu��)UART�ӿڰl(f��)�͔�(sh��)��(j��)��ÿ��ֻ�l(f��)��һ��(g��)�ֹ�(ji��)��(sh��)��(j��) | |||
����(sh��)�� | UINT32 uart_Write(UINT8 id, CHAR ch); | |||
����(sh��)�� | ||||
��ݔ�롿 | uartId | UART ID | ||
��ݔ�롿 | ch | ��(sh��)��(j��)��ַָ� | ||
����ֵ�� | > 0 | - | ͨ�^(gu��)UART�l(f��)���ֹ�(ji��)��(sh��) | |
0 | - | �l(f��)�͔�(sh��)��(j��)ʧ�� | ||
���������� | ͨ�^(gu��)UART�ӿ��x��(sh��)��(j��) | |||
����(sh��)�� | UINT32 uart_Read(UINT8 id, CHAR* buff) | |||
����(sh��)�� | ||||
��ݔ�롿 | id | UART ID | ||
��ݔ�롿 | buff | ��(sh��)��(j��)��ַָ� | ||
����ֵ�� | > 0 | - | ͨ�^(gu��)UART�����ֹ�(ji��)��(sh��) | |
0 | - | ���Ք�(sh��)��(j��)ʧ�� | ||
���������� | ���_(k��i)GPIO�ӿ� | |||
����(sh��)�� | VOID gpio_Open(UINT8 port, UINT8 direction) | |||
����(sh��)�� | ||||
��ݔ�롿 | port | �˿�̖(h��o) | ||
��ݔ�롿 | direction | 0 �C ݔ�� ��1 �C ݔ�� | ||
����ֵ�� | �o(w��) | |||
���������� | �P(gu��n)�]GPIO�ӿ� | |||
����(sh��)�� | VOID gpio_Close(UINT8 port) | |||
����(sh��)�� | ||||
��ݔ�롿 | port | �˿�̖(h��o) | ||
����ֵ�� | �o(w��) | |||
���������� | ��GPIO��(xi��)��0�����ߡ�1�� | |||
����(sh��)�� | VOID gpio_Write(UINT8 port, UINT8 data) | |||
����(sh��)�� | ||||
��ݔ�롿 | port | �˿�̖(h��o) | ||
��ݔ�롿 | data | ��(sh��)��(j��) | ||
����ֵ�� | �o(w��) | |||
���������� | ��GPIO�x��(sh��)��(j��) | |||
����(sh��)�� | UINT32 gpio_Read(UINT8 port) | |||
����(sh��)�� | ||||
��ݔ�롿 | port | �˿�̖(h��o) | ||
����ֵ�� | GPIO�ӿڮ�(d��ng)ǰ��(sh��)��(j��) | |||
// app_led.c #include ��hal_gpio.h�� #include ��tcpip_sockets.h�� static struct sockaddr_in ledSckAddr; static INT8 ledSckServer; static INT8 ledSckClient = 0; ///Only accept 1 byte data(0 or 1), ok for turn on/off the LED #define MAX_RECV_BUFF 1 #define LED_SCK_PORT 5050 #define MAX_LED_CONNECTION 1 VOID init(VOID) { struct sockaddr_in clientAddr; HAL_GPIO_GPIO_ID_T ledGpioId; HAL_GPIO_DIRECTION_T direction; ///Use the tenth GPIO port ledGpioId = HAL_GPIO_10; direction = HAL_GPIO_DIRECTION_OUTPUT; ///Must open the GPIO before use it gpio_Open(ledGpioId, direction); ledSckServer = socket(AF_INET, SOCK_STREAM, IPPROTO_TCP); memset(&ledSckAddr,0, sizeof(struct sockaddr_in)); ledSckAddr.sin_family=AF_INET; ledSckAddr.sin_addr.s_addr=htonl(INADDR_ANY); ledSckAddr.sin_port=htons(LED_SCK_PORT); if(-1 == bind(ledSckServer, (struct sockaddr *)(& ledSckAddr),sizeof(sockaddr_in))) { return ; } } VOID loop(VOID) { INT8 readLen = 0; UINT8 ledOn; /// If no connection, waiting for connect if (ledSckClient <= 0) { if(-1 == listen(ledSckServer, MAX_LED_CONNECTION)) { return ; } addrSize = sizeof(struct sockaddr_in); ledSckClient = accept(ledSckServer, (struct sockaddr *)(&clientAddr), &addrSize); if(-1 == ledSckClient) { return ; } } readLen = read(ledSckClient, &ledOn, MAX_REV_BUF_SIZE); if (readLen > 0) { if (0 == ledOn || 1 == ledOn) gpio_Write(ledGpioId, ledOn); } } |
���������� | �B�ӾW(w��ng)�j(lu��) | |||
����(sh��)�� | INT32 iot_Connect(const char *addr, INT16 portno) | |||
����(sh��)�� | ||||
��ݔ�롿 | addr | �W(w��ng)�j(lu��)��ַ��URL���� IP | ||
��ݔ�롿 | portno | �˿�̖(h��o) | ||
����ֵ�� | < 0 | ʧ�� | ||
���� | �ɹ� | |||
���������� | �l(f��)�͔�(sh��)��(j��) | |||
����(sh��)�� | INT32 iot_Send(INT32 sockfd, const INT8* buffer, UINT32 len) | |||
����(sh��)�� | ||||
��ݔ�롿 | sockfd | ���־�� | ||
��ݔ�롿 | buffer | �l(f��)�͔�(sh��)��(j��)���� | ||
��ݔ�롿 | len | �l(f��)�͔�(sh��)��(j��)�L(zh��ng)�� | ||
����ֵ�� | ָ��������BSSID�ִ� | |||
���������� | ���Ք�(sh��)��(j��) | |||
����(sh��)�� | INT32 iot_Recv(INT32 sockfd, INT8 *buffer, UINT32 len) | |||
����(sh��)�� | ||||
��ݔ�롿 | sockfd | ���־�� | ||
��ݔ�롿 | buffer | ���Ք�(sh��)��(j��)���� | ||
��ݔ�롿 | len | ���Ք�(sh��)��(j��)�L(zh��ng)�� | ||
����ֵ�� | ��(sh��)�H�����ֹ�(ji��)��(sh��) | |||
���������� | �P(gu��n)�]�W(w��ng)�j(lu��) | |||
����(sh��)�� | INT32 iot_Close(INT32 sockfd) | |||
����(sh��)�� | ||||
��ݔ�롿 | sockefd | ���־�� | ||
����ֵ�� | ||||
#include "iot_wifi.h" // Source device id allocated by oneNet #define SRC_DEV "777" // Destination device id allocated by oneNet #define DST_DEV "778" // API key allocated by oneNet #define API_KEY "your api key" // Data stream name, created on oneNet #define DATA_STREAM "your data stream" #define MAX_RESP_BUF 32 // ============================================================================ // Loop forever // Send temperature value to cloud application whenever changed // @return void // ============================================================================ VOID loop() { // Server information for connection INT8 *server_ip = "183.230.40.39"; INT8 *port = "876"; INT8 *src_dev = SRC_DEV; INT8 *dst_dev = DST_DEV; INT8 *src_api_key = API_KEY; INT8 *data_stream = DATA_STREAM; DOUBLE temperature = 0.0; INT sock, ret; EdpPacket *pkg = NULL; INT8 buffer[MAX_RESP_BUF] = { 0 }; SaveDataType data_type = kTypeSimpleJsonWithoutTime; recv_buf = NewBuffer(); // Connect to server sock = iot_Connect(server_ip, atoi(port)); if (sock < 0) { iot_Printf("Error connect cloud server. \n"); return; } // Build connect package follow oneNet EDP protocol pkg = PacketConnect1(src_dev, src_api_key); if (pkg == NULL) { iot_Printf("Build connect pkg failed.\n"); return; } // Send connection request pkg to cloud server ret = iot_Send(sock, (const char*)pkg->_data, pkg->_write_pos); DeleteBuffer(&pkg); while (1) { Temperature = user_poll_current_temperature(); // Build save data pkg follow oneNet EDP protocol pkg =PacketSavedataDouble(data_type,dst_dev,data_stream,temperature,0, NULL); if (pkg == NULL) { iot_Printf("Build data failed.\n"); return; } // Send temperature value pkg to clould server iot_Send(sock, (const char*)pkg->_data, pkg->_write_pos); DeleteBuffer(&pkg); iot_DelayMs(2000); } // Close socket iot_Close(sock); return; } |
���������� | ����(d��ng)�{(l��n)��ģ�K | |||
����(sh��)�� | VOID bt_Open(VOID) | |||
����(sh��)�� | ||||
��ݔ�롿 | �o(w��) | |||
����ֵ�� | �o(w��) | |||
���������� | �P(gu��n)�]�{(l��n)��ģ�K | |||
����(sh��)�� | VOID bt_Close(VOID) | |||
����(sh��)�� | ||||
��ݔ�롿 | �o(w��) | |||
����ֵ�� | �o(w��) | |||
���������� | �O(sh��)���{(l��n)���O(sh��)���� | |||
����(sh��)�� | VOID bt_SetLocalName(UINT8* name) | |||
����(sh��)�� | ||||
��ݔ�롿 | name | �����{(l��n)���O(sh��)���� | ||
����ֵ�� | �o(w��) | - | ||
���������� | �O(sh��)�ñ����{(l��n)����Ҋ(ji��n)�� | |||
����(sh��)�� | VOID bt_SetVisable(UINT8 visable); | |||
����(sh��)�� | ||||
��ݔ�롿 | visible | TRUE �C ��Ҋ(ji��n)��FALSE �C ����Ҋ(ji��n) | ||
����ֵ�� | �o(w��) | - | ||
���������� | ������߅�{(l��n)���O(sh��)�� | |||
����(sh��)�� | UINT32 bt_ScanDevice(UINT32 timeout) | |||
����(sh��)�� | ||||
��ݔ�롿 | timeout | ���賬�r(sh��)�r(sh��)�g����λ�� | ||
����ֵ�� | �@ȡ�{(l��n)���O(sh��)�係��(sh��) | |||
���������� | �䌦(du��)�{(l��n)���O(sh��)�� | ||
����(sh��)�� | UINT32 bt_BondDevice( t_bdaddr device_addr, UINT32 timeout ) | ||
����(sh��)�� | |||
��ݔ�롿 | Timeout | �䌦(du��)���r(sh��)�r(sh��)�g����λ�� | |
����ֵ�� | TRUE �䌦(du��)�ɹ� FALSE �䌦(du��)ʧ�� | ||
���������� | �{(l��n)���䌦(du��) | |||
����(sh��)�� | BOOL bt_GetBonedDevice(UINT32 index, rdabt_device_t_app *device); | |||
����(sh��)�� | ||||
��ݔ�롿 | Index | �{(l��n)���O(sh��)��������ȡֵ����0~9 | ||
��ݔ���� | device | �{(l��n)���O(sh��)����Ϣ��(sh��)��(j��)ָ� | ||
����ֵ�� | TRUE | - | �@ȡ�ɹ� | |
FALSE | - | �@ȡʧ�� | ||
���������� | �B���{(l��n)��SPP����(w��)�� | |||
����(sh��)�� | BOOL bt_SppConnect(t_bdaddr device_addr, UINT8 timeout); | |||
����(sh��)�� | ||||
��ݔ�롿 | device_addr | �{(l��n)����ַ | ||
��ݔ�롿 | timeout | �{(l��n)���B�ӳ��r(sh��) | ||
����ֵ�� | TRUE | - | �B�ӳɹ� | |
FALSE | - | �B��ʧ�� | ||
���������� | ���_(k��i)�{(l��n)��SPP�B�� | |||
����(sh��)�� | VOID bt_SppDisconnect(VOID) | |||
����(sh��)�� | ||||
��ݔ�롿 | �o(w��) | |||
����ֵ�� | �o(w��) | |||
���������� | ͨ�^(gu��)SPP�l(f��)�͔�(sh��)��(j��) | |||
����(sh��)�� | INT32 bt_SppSend(UINT8* buf, UINT32 size) | |||
����(sh��)�� | ||||
��ݔ�롿 | buf | �l(f��)�͔�(sh��)��(j��)���_�^(q��) | ||
��ݔ�롿 | size | �l(f��)�͔�(sh��)��(j��)�L(zh��ng)�� | ||
����ֵ�� | > 0 | - | ��(sh��)�H�l(f��)���ֹ�(ji��)��(sh��) | |
<= 0 | - | �l(f��)��ʧ�� | ||
���������� | ͨ�^(gu��)�{(l��n)��SPP���Ք�(sh��)��(j��) | |||
����(sh��)�� | INT32 bt_SppRecv(UINT32 timeout�� UINT8 *buf) | |||
����(sh��)�� | ||||
��ݔ�롿 | timeout | ���r(sh��)�r(sh��)�g����λ�� | ||
��ݔ���� | buf | ���Ք�(sh��)��(j��)���_�^(q��) | ||
����ֵ�� | > 0 | - | �ɹ����Ք�(sh��)��(j��)�ֹ�(ji��)��(sh��) | |
<= 0 | - | ���Ք�(sh��)��(j��)ʧ�� | ||
���������� | �{(l��n)��SPP����(w��)�˽��ܿ͑�(h��)���B�� | |||
����(sh��)�� | BOOL bt_SppAccept(UINT32 timeout) | |||
����(sh��)�� | ||||
��ݔ�롿 | timeout | ���r(sh��)�r(sh��)�g����λ�� | ||
����ֵ�� | TRUE | - | �B�ӳɹ� | |
FALSE | - | �B��ʧ�� | ||
// app_smart_plug.c #include ��bt_types.h�� #include ��hal_gpio.h�� static HAL_GPIO_GPIO_ID_T plugGpioId; VOID init(VOID) { HAL_GPIO_DIRECTION_T direction; // Use the fifth GPIO port plugGpioId = HAL_GPIO_15; direction = HAL_GPIO_DIRECTION_OUTPUT; // Must open the GPIO before use it gpio_Open(plugGpioId, direction ); bt_Open(VOID); } VOID loop(VOID) { t_DataBuf btData; memcpy(&btData, 0, sizeof(t_DataBuf)); // Return only when data available or error bt_SppRecv(&btData); if (btData.len > 0) { if (0 == (*btData.buff) || 1 == (*btData.buff) ) { gpio_Write(plugGpioId, *btData.buff); } } } |
| �gӭ���R (http://www.raoushi.com/bbs/) | Powered by Discuz! X3.1 |