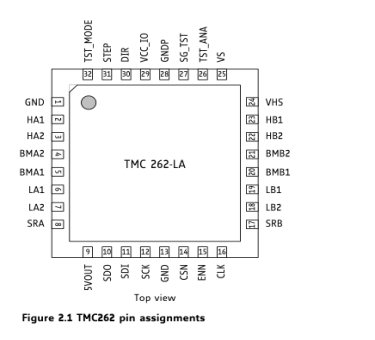
名稱 | 管腳 | 類型 | 功能描述 |
GND | 1 | 數字地 模擬地 | |
13 | |||
HA1 | 2 | O (VS) | 高端p型mos管輸出 用來驅動VHS去控制mos管的導通和截止 |
HA2 | 3 | ||
HB1 | 23 | ||
HB2 | 22 | ||
BMA1 | 5 | I (VS) | 橋接輸出的檢測輸入 用來短接到地,保護電路。 不用的時候受限于VS |
BMA2 | 4 | ||
BMB1 | 20 | ||
BMB2 | 21 | ||
LA1 | 6 | O 5V | 低端mos管驅動輸出 用來驅動5VOUT去控制mos管的導通和截止 |
LA2 | 7 | ||
LB1 | 19 | ||
LB2 | 18 | ||
SRA | 8 | AI | 斬波驅動程序的采樣電阻輸入 |
SRB | 17 | ||
5VOUT | 9 | 內部的5V線性穩壓器的輸出。這個電壓用來給低端驅動和內部模擬電路供電。外接一個濾波電容,電容靠近9和13引腳,另一端接地。470nf的陶瓷電容對大部分應用程序是足夠的。或者一個鉭電容(10μF或更多)能夠提高mos管柵極性能。 | |
SDO | 10 | DO VIO | SPI的數據輸出端(三態) |
SDI | 11 | DI VIO | SPI的數據輸入端(測試模式的掃描測試輸入端) |
SCK | 12 | DI VIO | SPI接口的串行時鐘輸入 (在測試模式掃描測試轉變位使能輸入) |
CSN | 14 | DI VIO | SPI接口的芯片選擇輸入 |
ENN | 15 | DI VIO | 禁止使能輸入端 關閉所有mos管 |
CLK | 16 | DI VIO | 系統時鐘輸入端。低電平 使用內部時鐘,高電平 禁用內部時鐘知道斷電 |
VHS | 24 | 高端電源電壓輸入(10v) | |
VS | 25 | 電機電源電壓 | |
TST_ANA | 26 | AO VIO | 模擬模式的測試輸入端,正常運行時保持常開狀態 |
SG_TST | 27 | DO VIO | 電機失速保護,高電平有效 |
GNDP | 28 | 功率管的接地,直接接地 | |
VCC_IO | 29 | 所有數字引腳的電源輸入輸出端,數字邏輯供電,可調3.3v和5v | |
DIR | 30 | DI VIO | 方向信號的輸入端,通過隨機抽取的高低電平決定電機的轉動方向,內置的濾波器提供一個60ns的小脈沖信號。 |
STEP | 31 | DI VIO | 步進信號輸入端,內置的濾波器提供一個60ns的小脈沖信號。 |
TST_MODE | 32 | DI VIO | 測試模式的輸入端使芯片進入測試模式正常狀態常接地 |
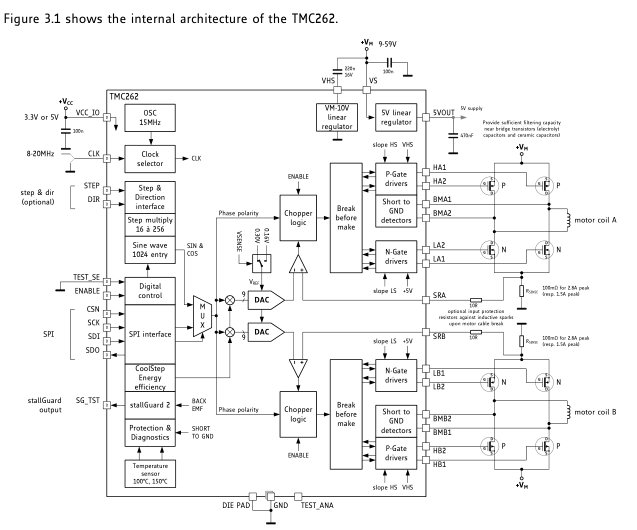
振蕩器和時鐘選擇器 | 提供了系統時鐘,(1.片上振蕩器 2.外部信號源) |
步進和方向信號接口 | 使用微步計數器和正弦列表生成目標電流(線圈電流) |
SPI接口 | 接收直接設置線圈電流值的指令 |
數據選擇器 | 從正弦列表和SPI接口選擇一種來控制輸入電機線圈的電流 |
乘法器(倍頻器) | 當電流大于電機負載的需求值或者所設計的芯片電流的尺寸參數時,使之按比例減小 |
數字模擬轉換器和電流比較器 | 將數字的電流值轉換為模擬信號,用來與采樣電阻上的電壓相比較,當模擬值大于采樣電阻電壓值時,比較器停止輸出斬波驅動電壓 |
先斷后通門驅動 | 確保沒有重復的脈沖信號,通過提高脈沖電壓和控制脈沖斜率來關閉功率mos管 |
片上穩壓器 | 為驅動器的P溝道mos管柵極和片上數字模擬電路提供高端電壓 |
名稱 | 描述 | 設置值 | 備注 |
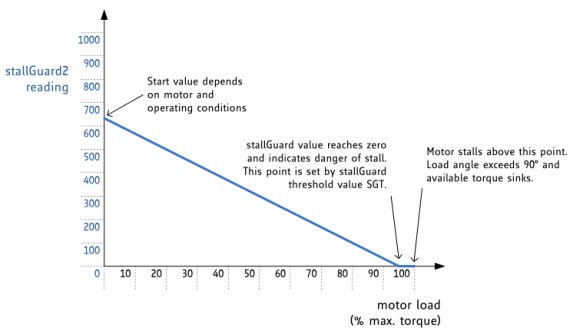
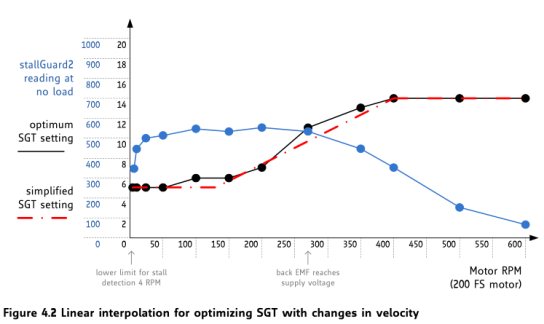
SGT | 7位帶符號的整數(二進制數0—1000000)用來設置Stallguard2的閾電平(這個閾電平是用來聲明SG_TST的輸出量)也用來設置讀出值的最佳測量范圍。負值用來增加敏感度,正值用來減小敏感度,這樣就需要更大的轉矩來表示失速。0是最好的初始值。不推薦操作值低于-10 | 0 | 敏感度中間值 |
| 靈敏度低 | ||
-1--- -64 | 靈敏度高 | ||
SFILT | Stallguard的濾波模式能得到更大的精度。如果設置為1,將減少測量頻率(每4個整步測量一次),如果設置為0,則不濾波。雖然電機的機械不對稱性有濾波補償,但是響應時間是有代價的。未濾波操作時建議迅速進行失步檢測,濾波操作時建議進行更加精確的負載檢測。 | 0 | |
1 | 濾波模式 | ||
SG | Stallguard的10位無符號整數測量值。更高的值表示較低的機械負荷。一個較低的值表示有更高的負荷和更高的負荷角。至于失速檢測,在失速前,調整SGT的值返回一個0值或略高于最大負載值。 | 0--1023 | 0:最大負荷 較低值:較大負荷 較高值:較低負荷 |
參數 | 描述 | 范圍 | 備注 |
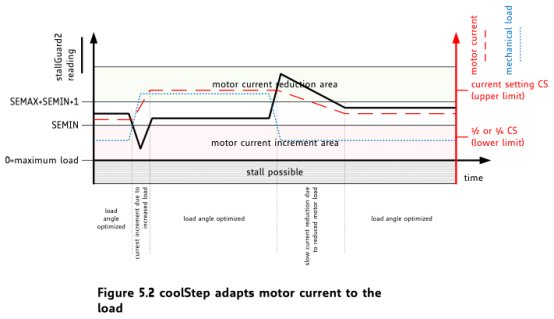
SEMIN | 4位的無符號整數用來設置較低閾值,如果SG的值小于這個閾值,coolstep為了覆蓋10位的SG值的下半部分范圍,4位的SEMIN的值擴展到32倍 | 0--15 | 閾值下限= SEMIN*32 (最大值15*32=480) |
SEMAX | 4位的無符號整數用來設置較高閾值。如果SG采樣等于或高于該閾值的次數足夠多,coolstep會減小兩個線圈的電流。閾值上限=(SEMIN+ SEMAX+1)*32 | 0--15 | 閾值上限=(SEMIN+ SEMAX+1)*32 (最大值(15+15+1)*32=991) |
參數 | 描述 | 范圍 | 備注 |
CS | 電流設置。縮減來自內置的正弦列表或SPI接口的線圈電流值。為了實現高精度電機操作,工作電流在16到32范圍內縮減,因為按比例縮減的電流值減小了微步的分辨率,這個值還控制著通過coolstep設置的電流的最大值。 | 0--31 | 比例因素:1/32.2/32….32/32 |
SEUP | 每次SG的測量值小于閾值下限時線圈電流的增量.電流增加速度. | 0--3 | 補寬:1 2 4 8 |
SEDN | SG的測量值大于閾值上限時,線圈電流時遞減的. 電流減小速度. | 0--3 | SG的測量次數減小:32 8 4 1 |
SEIMIN | 控制按比例縮減的線圈電流的下限值的模式位.如果這個位設置,電流的極限值是1/4CS.如果這個位是明確的,極限值是電流的1/2CS | 0 | 最小的電機驅動電流:CS的1/2 |
1 | CS的1/4 | ||
狀態字 | 描述 | 范圍 | 備注 |
SE | 5位無符號整數報告縮放后的有效電流值是由coolstep決定。這個值是由1除以32相似,因此它的范圍是1/32—32/32.這個值不大于CS的值或不小于1/4CS和1/2CS任何一個,它取決于SEIMIN的設置值。 | 0--31 | 實際上,按比例換算的電機電流設置:1/32.2/32….32/32 |
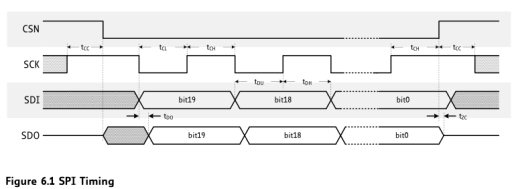
SPI接口時間選擇 | 數字特征 時鐘周期是tCLK | |||||
參數 | 表示 符號 | 條件 | 最小值 | 典型值 | 最大值 | 單位 |
SCK在CSN改變之前或之后有效值 | tCC |
| 10 |
|
| ns |
CSN的高端時鐘 | tCSH | 在CSN高電平前SCK有一個高端tCLK僅供與系統時鐘同步的最短時間 | tCLK | > 2tCLK+10 |
| ns |
SCK的低端時鐘 | tCL | 僅供與系統時鐘同步的最短時間 | tCLK | > tCLK+10 |
| ns |
SCK的高端時鐘 | tCH | 僅供與系統時鐘同步的最短時間 | tCLK | > tCLK+10 |
| ns |
SCK使用內部時鐘的頻率 | fSCK |
|
|
| 4 | MHz |
SCK使用外部16MHz時鐘的頻率 | fSCK |
|
|
| 8 | MHz |
SCK上升沿之前SDI設置的時間 | tDU | 假設最低的OSC頻率 | 10 |
|
| ns |
SCK上升沿之后SDI擁有的時間 | tDH | 假定同步時鐘 | 10 |
|
| ns |
SCK下降沿之后數據輸出地建立時間 | tDO | SDO上沒有電容性負載 |
|
| tFILT+5 | ns |
SDI SCK CSN的過濾器延時 | tFILT | 上升和下降沿 | 12 | 20 | 30 | ns |
寄存器 | 描述 |
驅動控制寄存器 | 驅動控制寄存器有不同的控制模式,不同的控制模式取決于運動控制器的接口是否采用step/dir接口 |
斬波設置寄存器 | 斬波設置寄存器擁有斬波器參數和模式設置位 |
步進優化設置寄存器 | 步進優化設置寄存器有關于步進優化的參數和模式設置位 |
保護和診斷設置寄存器 | 保護和診斷設置寄存器有關于保護和診斷的參數和模式設置位 |
驅動器設置寄存器 | 驅動器設置寄存器有可以控制功率場效應管和保護電路的參數和模式位。其中有一個SDOFF位用來控制step/dir接口還有一個RDSEL參數用來控制SPI事物里的返回值 |
位\寄存器 | 驅動控制寄存器 (SDOFF=1) | 驅動控制寄存器(SDOFF=0) | 斬波設置寄存器 | 步進優化設置寄存器 | 保護和診斷設置寄存器 | 驅動器設置寄存器 |
19 | 0 | 0 | 1 | 1 | 1 | 1 |
18 | 0 | 0 | 0 | 0 | 1 | 1 |
17 | PHA | 0 | 0 | 1 | 0 | 1 |
16 | CA7 | 0 | TBL1 | 0 | SFILT | TST |
15 | CA6 | 0 | TBL0 | SEIMIN | 0 | SLPH1 |
14 | CA5 | 0 | CHM | SEDN1 | SGT6 | SLPH0 |
13 | CA4 | 0 | RNDTF | SEDN0 | SGT5 | SLPL1 |
12 | CA3 | 0 | HDEC1 | 0 | SGT4 | SLPL0 |
11 | CA2 | 0 | HDEC0 | SEMAX3 | SGT3 | 0 |
10 | CA1 | 0 | HEND3 | SEMAX2 | SGT2 | DISS2G |
9 | CA0 | INTPOL | HEND2 | SEMAX1 | SGT1 | TS2G1 |
8 | PHB | DEDGE | HEND1 | SEMAX0 | SGT0 | TS2G0 |
7 | CB7 | 0 | HEND0 | 0 | 0 | SDOFF |
6 | CB6 | 0 | HSTRT2 | SEUP1 | 0 | VSENSE |
5 | CB5 | 0 | HSTRT1 | SEUP0 | 0 | RDSEL1 |
4 | CB4 | 0 | HSTRT0 | 0 | CS4 | RDSEL0 |
3 | CB3 | MRES3 | TOFF3 | SEMIN3 | CS3 | 0 |
2 | CB2 | MRES2 | TOFF2 | SEMIN2 | CS2 | 0 |
1 | CB1 | MRES1 | TOFF1 | SEMIN1 | CS1 | 0 |
0 | CB0 | MRES0 | TOFF0 | SEMIN0 | CS0 | 0 |
位 | RDSEL=%00 | RDSEL=%01 | RDSEL=%10 |
19 | MSTEP9 | SG9 | SG9 |
18 | MSTEP8 | SG8 | SG8 |
17 | MSTEP7 | SG7 | SG7 |
16 | MSTEP6 | SG6 | SG6 |
15 | MSTEP5 | SG5 | SG5 |
14 | MSTEP4 | SG4 | SG4 |
13 | MSTEP3 | SG3 | SG3 |
12 | MSTEP2 | SG2 | SG2 |
11 | MSTEP1 | SG1 | SG1 |
10 | MSTEP0 | SG0 | SG0 |
9 | - | - | - |
8 | - | - | - |
7 | STST | ||
6 | OLB | ||
5 | OLA | ||
4 | S2GB | ||
3 | S2GA | ||
2 | OTPW | ||
1 | OT | ||
0 | SG | ||
驅動控制寄存器 | SPI模式下的驅動器控制(SDOFF=1) | ||
位 | 名字 | 功能 | 備注 |
19 | 0 | 寄存器地址位 | |
18 | 0 | 寄存器地址位 | |
17 | PHA | A極 | 通過線圈A的電流信號: 0:電流從OA1引腳流到OA2 1:電流從OA2引腳流到OA1 |
16 | CA7 | A極電流的最高有效位 | 通過A線圈的電流大小。它的范圍是0—248,如果滯后或抵消他們的全部。滯后或抵消后得到的值不超過255 |
15 | CA6 | ||
14 | CA5 | ||
13 | CA4 | ||
12 | CA3 | ||
11 | CA2 | ||
10 | CA1 | ||
9 | CA0 | A極電流的最低有效位 | |
8 | PHB | B極 | 通過線圈B的電流信號: 0:電流從OB1引腳流到OB2 1:電流從OB2引腳流到OB1 |
7 | CB7 | B極電流的最高有效位 | 通過B線圈的電流大小。它的范圍是0—248,如果滯后或抵消他們的全部。滯后或抵消后得到的值不超過255 |
6 | CB6 | ||
5 | CB5 | ||
4 | CB4 | ||
3 | CB3 | ||
2 | CB2 | ||
1 | CB1 | ||
0 | CB0 | B極電流的最低有效位 | |
驅動控制寄存器 | SPI模式下的驅動器控制(SDOFF=0) | ||
位 | 名字 | 功能 | 備注 |
19 | 0 | 寄存器地址位 | |
18 | 0 | 寄存器地址位 | |
17 | 0 | 保留 | |
16 | 0 | 保留 | |
15 | 0 | 保留 | |
14 | 0 | 保留 | |
13 | 0 | 保留 | |
12 | 0 | 保留 | |
11 | 0 | 保留 | |
10 | 0 | 保留 | |
9 | INTPOL | 能否修改步進信號(倍頻) | 0:不能修改步進信號 1:步進信號乘以16倍 |
8 | DEDGE | 能否雙邊沿觸發步進信號 | 0:上升沿觸發,下降沿不觸發 1:雙邊沿觸發 |
7 | 0 | 保留 | |
6 | 0 | 保留 | |
5 | 0 | 保留 | |
4 | 0 | 保留 | |
3 | MRES3 | STEP/DIR模式下微步分辨率 | 每90°微步: %0000:256 %0001: 128 %0010:64 %0011:32 %0100:16 %0101:8 %0110: 4 %0111: 2(半步) %1000:1(整步) |
2 | MRES2 | ||
1 | MRES1 | ||
0 | MRES0 | ||
斬波設置寄存器 | 斬波設置 | ||
位 | 名字 | 功能 | 備注 |
19 | 1 | 寄存器地址位 | |
18 | 0 | 寄存器地址位 | |
17 | 0 | 寄存器地址位 | |
16 | TBL1 | 空白時間 | 空白時間間隔,系統時間周期下: %00:16 %01:24 %10:36 %11:54 |
15 | TBL0 | ||
14 | CHM | 斬波模式 | 這個模式位影響了HDEC、HEND、HSTRT參數在下面的解釋。 0:標準模式(傳播周期)、 1:與快速衰減時間保持恒定. 當到達額定電流,快速衰減時間也結束。快速衰減是在準時之后。 |
13 | RNDTF | 隨機關斷時間 | 允許隨機化慢衰減階段持續時間 0:斬波關斷時間隨著關斷時間位的設置而被固定 1:隨機模式,關斷時間可以隨時調整 dN CLK = -12 … +3 clocks. |
12 | HDEC1 | 磁滯衰減間隔時間 或快速衰減模式 | CHM=0 :磁滯衰減周期設置,按系統時鐘周期 %00:16 %01:32 %10:48 %11:64 CHM=1:HDEC1=0:電流比較器能夠在計時器到時時終止快速衰減階段。 HDEC1=1:只有定時器能夠終止快速衰減階段。 HDEC0: 快速衰減時間最高有效位設置 |
11 | HDEC0 | ||
10 | HEND3 | 磁滯結束(低)值 或正弦偏移量 | CHM=0 :%0000…%11111 磁滯衰減設置值是-3,-2,-1,0….12 (這個設置的1/512添加到電流設置中) 這個磁滯值被用于磁滯斬波 CHM=1 :%0000…%1111 補償值是-3,-2,-1,0….12 正弦波補償和它1/512的值用于添加到每一個正弦波條目的絕對值。 |
9 | HEND2 | ||
8 | HEND1 | ||
7 | HEND0 | ||
6 | HSTRT2 | 磁滯開始(高)值 或快速衰減時間設置 | CHM=0 :磁滯補償開始到HEND結束 %000:1 %100:5 %001:2 %101:6 %010:3 %110:7 %011:4 %111:8 有效范圍:HECD+HSTRT<=15 CHM=1 :快速衰減持續時間的三個最低有效位 快速衰減時間是系統時間周期的倍數: NCLK=32*(HDEC0+HSTRT) |
5 | HSTRT1 | ||
4 | HSTRT0 | ||
3 | TOFF3 | 關斷時間/MOS管 不使能 | 慢衰減持續時間。如果TOFF為0,MOS管關斷.如果TOFF不是0,慢衰減時間是系統時間周期的倍數。NCLK=12+(32*TOFF)(最小時間是64倍的時間周期) %0000:驅動不使能,所有橋關閉 %0001:1(用于最小的24倍時鐘的TBL) %0010…%1111:2…15 |
2 | TOFF2 | ||
1 | TOFF1 | ||
0 | TOFF0 | ||
步進優化設置寄存器 | 步進優化設置 | ||
位 | 名字 | 功能 | 備注 |
19 | 1 | 寄存器地址位 | |
18 | 0 | 寄存器地址位 | |
17 | 1 | 寄存器地址位 | |
16 | 0 | 保留 | |
15 | SEIMIN | 最小的步進優化電流 | 0:1/2CS電流設置 1:1/4CS電流設置 |
14 | SEDN1 | 電流衰減速度 | 每個線圈電流的衰減都能保證智能保護值的采樣必須大于等于上閾值的次數: %00:32 %01:8 %10:2 %00:1 |
13 | SEDN0 | ||
12 | 0 | 保留 | |
11 | SEMAX3 | 高端步進優化閾值伴隨著一個來自較低閾值的補償 | 如果智能保護功能的SG采樣測量值等于或大于(SEMIN+SEMAX+1)*32足夠次數,那么線圈電流的比例因素會降低。 |
10 | SEMAX2 | ||
9 | SEMAX1 | ||
8 | SEMAX0 | ||
7 | 0 | 保留 | |
6 | SEUP1 | 電流增加速度 | 每次電流增加的步數,智能保護功能的SG采樣值低于較低閾值 %00:1 %01:2 %10:4 %11:8 |
5 | SEUP0 | ||
4 | 0 | 保留 | |
3 | SEMIN3 | 更低的步進優化閾值/步進優化不使能 | 如果SEMIN的值是0,步進優化功能不使能。如果SEMIN不是0并且智能保護功能的SG采樣值低于SEMIN*32,優化步進的電流比例因子增加。 |
2 | SEMIN2 | ||
1 | SEMIN1 | ||
0 | SEMIN0 | ||
保護和診斷設置寄存器 | 保護和診斷設置 | ||
位 | 名字 | 功能 | 備注 |
19 | 1 | 寄存器地址位 | |
18 | 1 | 寄存器地址位 | |
17 | 0 | 寄存器地址位 | |
16 | SFILT | 濾波使能 | 0:標準模式,最快的響應時間 1:濾波模式,每補償4個整步電機的結構更新一次,有最高的精度。 |
15 | 0 | 保留 | |
14 | SGT6 | 閾值 | 智能保護閾值控制著關于讀出和失速指示(SG_TST)輸出最佳的測量范圍.較低的值導致較高的靈敏度。較低的轉矩需要顯示失速。閾值是一個有兩個補碼的有符號整數。這個值建議不低于-10. 范圍:-64到+63 |
13 | SGT5 | ||
12 | SGT4 | ||
11 | SGT3 | ||
10 | SGT2 | ||
9 | SGT1 | ||
8 | SGT0 | ||
7 | 0 | 保留 | |
6 | 0 | 保留 | |
5 | 0 | 保留 | |
4 | CS4 | 電流大小 | 電流大小通過SPI和STEP/DIR設置 %0000…%11111:1/32,2/32,3/32,…32/32 這個值加1除以32,因此范圍是1/32到32/32 舉個例子:CS=20是21/32的電流 |
3 | CS3 | ||
2 | CS2 | ||
1 | CS1 | ||
0 | CS0 | ||
驅動器設置寄存器 | 驅動器設置 | ||
位 | 名字 | 功能 | 備注 |
19 | 1 | 寄存器地址位 | |
18 | 1 | 寄存器地址位 | |
17 | 1 | 寄存器地址位 | |
16 | TST | 保留測試模式 | 正常工作時,必須被清除,當設置時, SG_TST腳輸出暴露的數字測試值,TEST_ANA腳輸出暴露的模擬測試值。測試值的選擇被SGT1和SGT0控制。 TEST_ANA: %00:測試分析2倍Vth %01:測試分析DAC輸出 %10:測試分析Vdd一半 SG_TST: %00:comp_A %01:comp_B %10:時鐘 %11:導通xy |
15 | SLPH1 | 高端斜率控制 | %00:最小值 %01:最低溫度補償模式 %10:中間溫度補償模式 %11:最大值 在溫度補償模式中,如果溫度過熱達到警報溫度時,MOS管門極驅動力增加。這個補償的溫度取決于高端斜率控制。 |
14 | SLPH0 | ||
13 | SLPL1 | 低端斜率控制 | %00:最小值 %01:最小值 %10:中間值 %11:最大值 |
12 | SLPL0 | ||
11 | 0 | 保留 | |
10 | DISS2G | 短接到地保護 不使能 | 0:短路保護使能 1:短路保護不使能 |
9 | TS2G1 | 短接到地檢測 定時器 | %00:3.2μs %01:1.6μs %10: 1.2μs %11:0.8μs |
8 | TS2G0 | ||
7 | SDOFF | STEP/DIR接口 不使能 | 0:使能STEP/DIR操作 1:不使能STEP/DIR操作,SPI接口被用于移動電機 |
6 | VSENSE | 采樣電阻固定 電壓電流比例 | 0:全面的采樣電阻電壓是306mV 1: 全面的采樣電阻電壓是165mV (這里的全面指的是電流的31個設置和255個數字模擬轉化器的值) |
5 | RDSEL1 | 選擇讀出值 (讀出位) | %00:微步位置返回值 %01:負載檢測水平狀態返回 %10:負載檢測和智能節能電流水平返回 %11:保留,不用 |
4 | RDSEL0 | ||
3 | 0 | 保留 | |
2 | 0 | 保留 | |
1 | 0 | 保留 | |
0 | 0 | 保留 | |
驅動控制的狀態 | 讀響應 | ||||
位 | 名稱 | 功能 | 描述 | ||
RDSEL=%00 | %01 | %10 | |||
19 | MSTEP9 | SG9 | SG9 | 線圈A微步計數器 stallGuard2 SG9:0價值 stallGuard2值SG9:5和coolStep值SE4:0 | 在正弦表中,用步進/方向模式下的微步位置。MSTEP9是極性位: 0:電流從OA1針到OA2針腳。 1:電流從OA2插針到OA1針腳。 |
18 | MSTEP8 | SG8 | SG8 | ||
17 | MSTEP7 | SG7 | SG7 | ||
16 | MSTEP6 | SG6 | SG6 | SG9:0 stallGuard2值 | |
15 | MSTEP5 | SG5 | SG5 | ||
14 | MSTEP4 | SG4 | SE4 | ||
13 | MSTEP3 | SG3 | SE3 | ||
12 | MSTEP2 | SG2 | SE2 | stallGuard2值SG9:5和實際的coolStep縮放值SE4:0。 | |
11 | MSTEP1 | SG1 | SE1 | ||
10 | MSTEP0 | SG0 | SE0 | ||
9 | 保留 | ||||
8 | 保留 | ||||
7 | STST | 靜止指示器 | 0:沒有檢測到的靜止狀態。 1:在最后的2^20(1048576)個系統時鐘周期中,沒有出現步進脈沖的上升沿。 | ||
6 | OLB | 打開負載指示器 | 0:沒有檢測到打開負載的條件。 1:在最后的脈沖周期,線圈有恒定的極性時,沒有發生過斬波的事件。只有當電流達到最高設置的1/16可以清除這一位! 提示:這個位只是一個狀態指示器。當這個位被設定時,芯片不會采取任何其他動作。在快速運動和靜止時可能出現錯誤的跡象。只在慢動作時檢查這一點。 | ||
5 | OLA | ||||
4 | S2GB | 高端晶體管的短路檢測位 | 0:沒有達到短接到地的關閉條件。 1:短到地達到關閉狀態。 每次短路時,短路計數器就會增加,此時斬波循環被暫停。計數器因每一個相位極性的變化而減少。當計數器達到3次,mos管關閉。保持MOSFETs關閉狀態,直到關閉條件通過禁用和重新啟用驅動程序來清除。關閉狀態通過取消ENN(使能)輸入或清除TOFF(關斷時間)參數來重置。 | ||
3 | S2GA | ||||
2 | OTPW | 過溫警報 | 0:溫度沒有達到過熱的警告條件。 1:溫度達到了警告閾值(警報最大值) | ||
1 | OT | 過溫停止 | 0:溫度沒有達到過熱的關閉條件。(警報溫度小于關閉溫度) 1:溫度達到使mos管關閉的條件。 | ||
0 | SG | 保護診斷狀態 | 0:沒有達到電機失速的檢測條件。 1:已經達到stallGuard2的閾值,此時SG_TST輸出高電平。 | ||

STEP /DIR 接口的時鐘 | 數字特征 時鐘周期是tCLK | |||||
參數 | 象征 | 條件 | 最小值 | 典型 | 最大值 | 單位 |
步進脈沖頻率 | fSTEP | DEDGE=0 | 1/2 fCLK | |||
DEDGE=1 | 1/4 fCLK | |||||
整步脈沖頻率 | fFS | fCLK/512 | ||||
步進脈沖低電平時間 | tSL | max(tFILTSD, tCLK+20) | ns | |||
步進脈沖高電平時間 | tSH | max(tFILTSD, tCLK+20) | ns | |||
STEP /DIR設置時間 | tDSU | 20 | ns | |||
步進脈沖后方向脈沖低電平時間 | tDSH | 20 | ns | |||
STEP /DIR高峰過濾時間 | tFITSD | 雙邊沿 | 36 | 60 | 85 | ns |
STEP /DIR相對于上升的CLK輸入的采樣 | tSDCLKHI | 上升沿 | ns | |||
 TC262譯.docx
(506.56 KB, 下載次數: 185)
TC262譯.docx
(506.56 KB, 下載次數: 185)
 下載的不是完整版啊 只到7.2
下載的不是完整版啊 只到7.2onono 發表于 2019-1-31 10:34
樓主很帥!未來會用到TMC5160等TMC芯片,很有參考意義。感謝分享!
| 歡迎光臨 (http://www.raoushi.com/bbs/) | Powered by Discuz! X3.1 |