���}: ����51��Ƭ�C�Ĝؿ��L���OӋՓ�����d [��ӡ���]
����: 51hei�F�F �r�g: 2018-7-24 01:54
���}: ����51��Ƭ�C�Ĝؿ��L���OӋՓ�����d
����51��Ƭ�C�Ĝؿ��L���OӋ
ժҪ
���ן�������˂�����L�ȁ�����������ڹ��I���a����������͙Cе����L�ȁ�ɢ��ȡ��S���ضȿ��Ƶļ��g����lչ������\�����Ĝؿ���L��Ҳ��u���M���˂��������������ؿ���L�ȿ��Ը����h���ض��Ԅ��{����L�Ȇ�ͣ�c�D�٣��ڌ��H�����ʹ��������ؿ��L�Ȳ��H�ɹ�ʡ���F����YԴ������Ҳ������˂�����������a�������
���OӋ��һ�N�ؿ��L��ϵ�y���������`���ĜضȸМy���@ʾ���ܣ�ϵ�y����STC89C51 ��Ƭ�C�������ƽ�_���L���D���M�п������������DS18B20���֜ضȂ������ɼ����r�ضȣ�����Ƭ�C̎����ͨ�^���O����ֱ���L�ȵ�늙C���������ɼ��Č��r�ض�����������F���L�ȵ�������ͣ������������Ñ��O�ø��������͜ض�ֵ���y�Üض�ֵ�ڸߵ͜ض�֮�g�r���_�L�����L�n�����ض����߳��^���O���Ĝضȕr�Ԅ��ГQ�����L�n���������ض�С�����O���Ĝضȕr�Ԅ��P�]�L�����������Ơ�B�S���ضȶ���������
Ŀ�
ǰ����
��1�� �wՓ
1.1 �о����n�}��Ŀ�ĺ����x
1.2 �lչ�F��
��2�� ���w�����x��
2.1 �ضȂ��������x��
2.2 ���ؙC���x��
2.3�@ʾ�·
2.4�{�ٷ�ʽ
��3�� ϵ�yӲ���M��
3.1 ϵ�y�Y��
3.2 ����оƬ��B
3.2.1 STC89C51����
3.2.2 STC89C51��Ҫ���ܺ����܅���
3.2.3 STC89C51��Ƭ�C���_�f��
3.2.4 STC89C51��Ƭ�C��Сϵ�y
3.2.5 STC89C51�Д༼�g����
3.3 DS18B20�ضȲɼ��·
3.3.1 DS18B20 �����c���Ȳ�����
3.3.3 DS18B20�Ĺ���ԭ��
3.3.3 DS18B20�����r��
3.4 ���a�����@ʾ�·
3.4.1 ���a�����·
3.4.2 ���a���@ʾ�·
3.5 �L�����·
3.6 ���Iģ�K
��4�� ϵ�yܛ���OӋ
4.1 ܛ����B
4.1.1 Keil C51
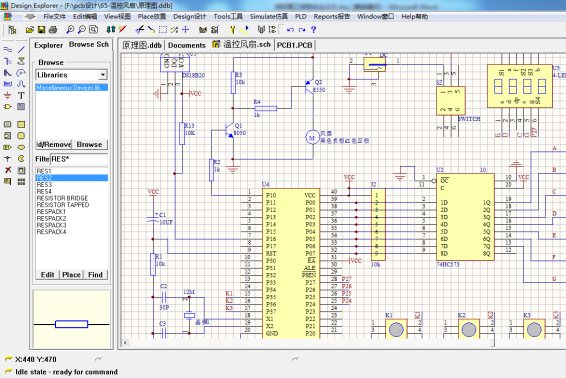
4.1.2 Protel99SE
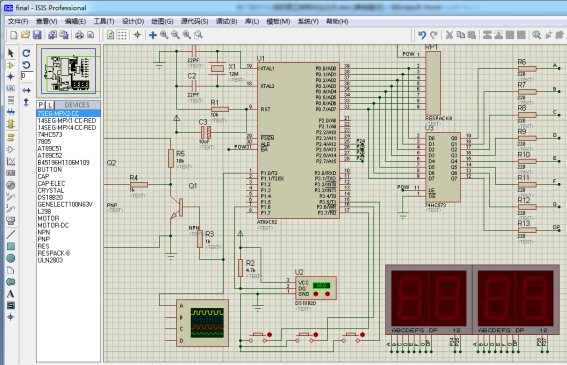
4.1.3 Proteus
4.2 ���������̈D
4.3 DS18B20�ӳ������̈D
4.4 ���a���@ʾ�ӳ������̈D
4.5 ���I�ӳ������̈D
��5�� ϵ�y�{ԇ
5.1 ܛӲ���{ԇ
5.1.1 ���I�@ʾ���ֵ��{ԇ
5.1.2 ������DS18B20�ضȲɼ������{ԇ
5.1.3 �L���{���·�����{ԇ
5.2 ϵ�y����
5.2.1 ϵ�y���F�Ĺ���
5.2.2 ϵ�y���ܷ���
�Y��Փ
�x �o
�����īI
�����
���1��protelԭ��D
���2��proteus����D
���3��Դ����
�����Y���g��
ǰ����
�ڬF������У��L�ȱ��V���đ��ã��l�]���e���p�ص����ã��������˂��õ�ɢ���L��������I���a�д��͙Cе�е�ɢ���L���Լ��F�ڹPӛ����X�ϏV��ʹ�õ�����CPU�L�ȵ��������S���ضȿ��Ƽ��g�İlչ�����˽����L���\�D�r�������Լ���ʡ��Դ�ȣ��ؿ��L��Խ��Խ�ܵ���ҕ�����V���đ������
�S����Ƭ�C�ڸ����I��ďV������������S���Æ�Ƭ�C�����ƵĜضȿ���ϵ�yҲ���\������������چ�Ƭ�C�Ĝؿ��L��ϵ�y����ʹ�L�ȸ����h���ضȵ�׃�����F�Ԅӆ�ͣ��ʹ�L���D���S���h���ضȵ�׃����׃����������F���L�ȵ����ܿ��ơ������OӋ��F������˂��������Լ����a�������T�������������˂��������|�������aЧ�ʵ�ͬ�r߀�ܹ�ʡ�L���\�D�����������
�����OӋ�˻��چ�Ƭ�C�Ĝؿ��L��ϵ�y���Æ�Ƭ�C������������ÜضȂ�����DS18B20����ضȲɼ�Ԫ�������������ɼ����Ĝض�������ͨ�^�ɂ����O�����L��늙C�������z�y���Ĝض��cϵ�y�O���Ĝضȱ��^���F�L��늙C���Ԅӆ��Ӻ�ֹͣ�����ܸ����ضȵ�׃���ԄӸ�׃�L��늙C���D�ٙnλ��ͬ�r��LED�˶Δ��a���@ʾ�z�y���Ĝض��c��ǰ�nλ������ϵ�y���A�O�ضȵ��O����ͨ�^�����������I�팍�F��������һ�����O�ð��I���һ���������A�O�ضȣ�һ���ǜpС�A�O�ضȡ�
��1�� �wՓ
1.1 �о����n�}��Ŀ�ĺ����x
�������������҂�������ʹ��һЩ�c�ض����P���O���������������F���mȻ���ٳ��м�ͥ�����˿��{���������ռ�Ї����˿ڵ��r��^���fʹ����L�����齵�ط����O��������ģ��������r��������ض����f�ܸߣ���L�ȑ����D�١����L�������ʹ�˸е�������������ϣ���ؽ����������������˯�����������ԓ�pС�D�������������ʹ�˸�ð���mȻ�L�ȶ����{����ͬ�nλ�Ĺ�����������Ҫ���քӓQ�n������˯���˾͟o�ܞ�����������ձ���õĶ��r���P�]��������һ�����Ƕ��r�r�g�L�������ƣ�һ����һ�ɂ�С�r����һ���������һ�ɂ�С�r�������f�]�н��ͺܶ࣬���L�Ⱦ��P�]�ˣ�ʹ����˯���П��Ѷ����ò������´��_�L�ȣ����Ӷ��r���r�g����dz��韩������ҿ��ܶ�ζ��r�����һ�ζ��r�r�g̫�L��������ڜضȽ����Ժ��L�����f�^�m���L��ʹ�˸�ð����������������ֻ�к��εĵ��˶��r�r�g���P�]�L���Դ�Ć�һ��������������ܝM����׃�����L���L�ٴ�С�IJ�ͬҪ���ֱ������^���ʵ���ӮaƷɢ�᷽�������F�ڽ^��������������L��ϵ�y��������L������՚����ӣ����ߟ��������ʹ��ӮaƷ�����ڰl����ġ�Ҫʹ��ӮaƷ�����^�͵Ĝض����������ô��ʡ����D��������L�����L������������L�ȵ������c�书�ʳ����ȡ����Ҫ����������tҪ�pС�L���D���������֕���������O��ض��������������܃�ȫ���������Q�������}�������҂��OӋ���@�לؿ��L��ϵ�y�������ϵ�y���ø߾��ȼ��ɜضȂ�����������Æ�Ƭ�C��������������@ʾ���r�ضȣ�������ʹ�����O���Ĝض��Ԅ��������ضȕr����С�L�������L�����ͣ�C�������������_�ȸߣ������ʴ_������
1.2 �lչ�F��
��������ѽ���ȫ�M���������Ϣ����������ضȿ������ڸ��и��I���ѽ��õ��˳�ֵ����á����Ќ��ض��M�Ќ��r�O�صĹ�������Ա��C���I�x��������y������������r�I�Nֲ�������\�������������������c���܌��r�O���܇��ضȵĸߵ���������ͬ�r����늙C�\������׃�ض���������ďV�����ú��ռ��o�˂����ճ�������˷��������
�ؿ��L�����Æ�Ƭ�Cϵ�y����ɵ�һ��С�͵Ŀ���ϵ�y�������F�A���\���c���ȴּ�ͥ�����ϵ�yЧ��Խ��Խ���������ɱ�ҲԽ��Խ�͡���lչڅ�ݿ��Ը��������|�M�������ĸ��M�����\���c��ͬ���ϵĜضȱO�y���ƣ������������Ľ���Ч�档
��2�� ���w�����x��
2.1 �ضȂ��������x��
�ضȂ������������N�����ɹ��x��
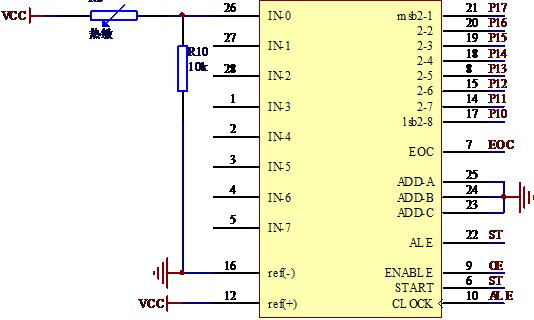
����һ���x�ß����������Мy�ضȵĺ���Ԫ��������ͨ�^�\��Ŵ����Ŵ����ڜض�׃����������������׃����������M��������ݔ��늉�׃������늉�׃����̖������AD�D�QоƬADC0809��ģ�M��̖�D���锵����̖ݔ���Ƭ�C̎�������w�������2-1
�D2-1 �����ضȲɼ��·
�����������ß��ż����Мy�ضȵĺ���Ԫ���������Ϙ�ʽ�·���\��Ŵ��·��AD�D�Q�·�����ض�׃����̖�����Ƭ�C̎�����˷���ԭ���ͷ���һ��ԭ����ͬС����AD�D�Q�·һ���������ģ�M��ݔ���̎����ʽ��һ���������ż��߀��Ҫ��Ϙ�ʽ�·�����w���ӏ��s�c�����Ǵ˷����Ĝy�ط������V�������
�����������Ô���ʽ���ɜضȂ�����DS18B20����Мy�ضȵĺ���Ԫ�����ֱ��ݔ�����֜ض���̖����Ƭ�C̎���������
�D2-2 DS18B20�ضȲ��·
���ڷ���һ���������ß�������Ѓr����ˡ�Ԫ����ُ�ă��c�������������茦�ضȵļ�׃�������У�AD0809Ҳֻ��8λ����������@ʾ�ض�Ҳֻ���@ʾ���ȣ������@ʾ��С��������̖�ɼ������Ŵ�������D�Q�^����߀���a��ʧ����`��������ڟ�������R-T�Pϵ�ķǾ��ԣ��䱾����茦�ضȵ�׃�������^���`�������mȻ����ͨ�^һ���·���Լm�������������H��ʹ�·���s�����Խ��ͣ����������w��̎�ضȭh���ض�׃�����y�ԙz�y��С�Ĝض�׃������ԓ�������m�ϱ�ϵ�y�����
���ڷ����������ß��ż�͘�ʽ�y���·�����ڟ�������䌦�ضȵ������Ժ������ķǾ����`����^����������y�ط���Ҳ�dz���������-50�z�϶ȵ�1600�z�϶Ⱦ��ɜy����������Ȼ�����·���s����������ض��������_������ϵ�yҪ��Ę˜�����ʲ�����ԓ��������
���ڷ��������������ڔ���ʽ���ɜضȂ�����DS18B20�ĸ߶ȼ��ɻ��������������ӷŴ��D�Q���·���`�����أ��ض��`���С�����������������Мy�ضȵ�ԭ���c�����ɷN������ԭ���������|�IJ�ͬ�������ʹ����ضȷֱ����O�������ض�ֵ�������Ȳ��D�Q�ɔ�����ֱ��ݔ����������ϵ�y�����OӋ����������ԓ�������������M�Ćο������g��1-WRIE���������c��Ƭ�C�Ľӿ�׃�ķdz����������ɔ_����������P��DS18B20��Ԕ�������������桰Ӳ���OӋ���е�������B���
2.2 ���ؙC���x��
����һ���������ϵ�І�Ƭ�C����ϵ�y�Ŀ������������ϵ�І�Ƭ�C���Ԍ��F���N���s��߉�������ģ�K������ܶȸ����������������������һ�KоƬ�ϣ��p�����w�e������˷����ԡ����ϵ�І�Ƭ�C�����ϵ�y��̎���ٶȣ��m�������Ҏģ���rϵ�y�Ŀ��ƺ��������
�����������Æ�Ƭ�C������ƺ����������ܛ�����̵ķ����M�Мض��Д����������ڶ˿�ݔ��������̖�����
��51��Ƭ�C�r������ϵ�е͵ö�����ұ��OӋ����Ҫ�ܸߵ�̎���ٶȣ��Ľ����ͷ���ʹ�ýǶȿ��]�����OӋ�x���˷����������ڷ�����������Ԇ�Ƭ�C����������������ͨ�^���������܌��������Мy���Ĝض�ͨ�^�@ʾ�·�@ʾ����������������Ñ���ͨ�^�I�P�ӿڣ������O�������ބ����ض�ֵ�������M��ȫ��λ����������������ͨ�^�����Д��ضȾ��ИO�ߵľ��ʶ�������ܾ��_���խh���ضȵ�С׃������ʱ�ϵ�y���÷��������
2.3�@ʾ�·
����һ�����Ô��a���@ʾ�ضȣ��ӑB�����@ʾ��ʽ���������LED���a���@�N�������mȻ�@ʾ�ă����������������Ҳ�����@ʾ���ֺׂ͎�Ӣ����ĸ�����@���OӋ���ѽ�����ˣ����҃r���Һ���ַ�ʽҪ�͵Ķ�������˿����OӋ�����ijɱ�����ڴ��OӋ���x��LED���a���@ʾ������
������������Һ���@ʾ��LCD�@ʾ�ضȡ��@ʾ��Һ���ַ�ʽ��������ܛ���_���ܺõĿ��ƣ�Ӳ�������s�����Һ���ַ��@ʾ�������@ʾ���S���ă��ݣ�����Һ���ַ�ʽ�r���F��
���ڷ���һ�������ԓ�����ɱ����������@ʾ�ض����_��Ŀ������ҹ�gҲ�ܿ�Ҋ�����ĘO�ͣ��@ʾ�ӳ���ľ���Ҳ�������Σ��@�N�@ʾ��ʽ�õ��V�����á�����ĵط��ǒ����@ʾ��ʽ��ʹ���a�������c�������˕����W�q����������۵�ҕ�X�����r�g��20MS����������a�ܒ�������С���@���r�g�r���ی����X�����W�q���������˿���ͨ�^��������l�ʁ������W�q�����
���ڷ������������Һ���w�@ʾ�������@ʾ�ַ��������������@ʾ����߀���@ʾ�ַ������D�εă��c��������@��LED���a�ܟo���ȔM������������Һ���@ʾģ�K�r���F���ӳ�����s�����ĺ��Ό��õ�ԭ�t���]���������ϵ�y���÷���һ�����
2.4�{�ٷ�ʽ
����һ������׃�����{����ʽ����\��늴ŸБ�ԭ�팢220V늉�ͨ�^��Ȧ��������ͬ��늉��������L��늙C�ӵ���ͬ늉�ֵ�ľ�Ȧ�Ͽɿ���늙C���D��������Ķ������L���L����С��
���������������O����PWM�M������
���ڷ���һ��������ڲ���׃������׃늉��{�����������L�ټ��e��������������m�����Ի�Ҫ�������������׃���^���Е��Гp�İl�ᣬЧ�ʲ�������l���в���ȫ����������
���ڷ����������PWM��һ�����c�Ǐ�̎����������ϵ�y��̖���ǔ�����ʽ������o���M�Д�ģ�D�Q����̖���֞锵����ʽ�Ɍ���Ӱ푽�����С�������ֻ���ڏ������Ԍ�߉1��׃��߉0��߉0��׃��߉1�r��Ҳ���܌�������̖�a��Ӱ����������ֿ�������������PWM������ģ�M���Ƶ�����һ�����c���������@Ҳ����ijЩ�r��PWM����ͨ�ŵ���Ҫԭ��������ģ�M��̖�D��PWM���ԘO������Lͨ�ž��x���ʱ�ϵ�y���÷����������
��3�� ϵ�yӲ���M��
3.1 ϵ�y�Y��
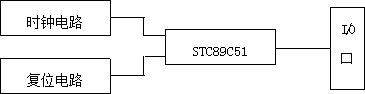
��ϵ�y�ɼ��ɜضȂ���������Ƭ�C������LED���a��������O�����·��һЩ������������M������ʹ�þ��Ѓr����ُ��STC89C51��Ƭ�C���̿��������ͨ�^�ij���ɷ��㌍�Fϵ�y�������ϵ�y�Ŀ�D�Y�����£���Ҋ������
3.2.4 STC89C51��Ƭ�C��Сϵ�y
��Сϵ�y������Ƭ�C��������ı�Ҫ���Դ�����r������λ�Ȳ�����������ʹ��Ƭ�Cʼ�K̎���������\�Р�B�����Դ�����r犵��·��ʹ��Ƭ�C���\�еı�l�������Ԍ���Сϵ�y���鑪��ϵ�y�ĺ��IJ��֣�ͨ�^�����M�д惦���Uչ���A/D�Uչ�����ʹ��Ƭ�C����^���s�Ĺ��������
STC89C51��Ƭ����ROM/EPROM�Ć�Ƭ�C�������������@�NоƬ���ɵ���Сϵ�y���Ωp�ɿ��������STC89C52��Ƭ�C������С����ϵ�y�r������ֻҪ����Ƭ�C���ϕr��·�͏�λ�·���������Y����D2-3��ʾ��������ڼ��ɶȵ�������������С����ϵ�yֻ������һЩС�͵Ŀ��Ɔ�Ԫ��
�D3-3 ��Ƭ�C��Сϵ�yԭ����D
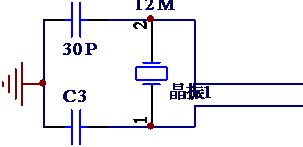
1. �r��·
STC89C51��Ƭ�C�ĕr���̖ͨ���ЃɷN��ʽ�a����һ�ǃȲ��r犷�ʽ������������ⲿ�r犷�ʽ�����Ȳ��r犷�ʽ��D2-4��ʾ����STC89C51��Ƭ�C�Ȳ���һ��ʎ�·��ֻҪ�چ�Ƭ�C��XTAL1(18)��XTAL2(19)���_���ʯӢ���w(���Q����)�����͘������Լ���ʎ�����چ�Ƭ�C�Ȳ��a���r��}�_��̖��������D�����C1��C2�������Ƿ����l�ʺͿ����������������ֵ��5~30pF�����������ֵ��30pF����������CYS����ʎ�l�ʷ�����1.2~12MHz�g�x�������������ֵ��12MHz��6MHz������
�D3-4 STC89C51�Ȳ��r��·
2. ���
����STC89C51��Ƭ�C��RST���_������ƽ������2���C�����ڕr�����Ƭ�C�Ȳ��͈��Џ�λ����(��ԓ���_���m���ָ��ƽ����Ƭ�C��̎��ѭ�h��λ��B)��
��λ�·ͨ����������Ԅӏ�λ�Ͱ��o��λ�ɷN��ʽ��
��ε�����Ԅӏ�λ�·������Ԅӏ�λ��ͨ�^�ⲿ��λ�·����ݳ��늁팍�F�������ֻҪVcc�������r�g�����^1ms,�Ϳ��Ԍ��F�Ԅ���늏�λ��
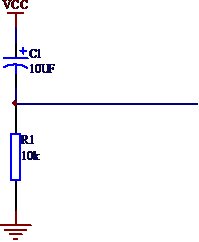
������늏�λ�⣬�Еr߀��Ҫ���I�քӏ�λ����������OӋ�����õİ��I�քӏ�λ���������I�քӏ�λ���ƽ��ʽ���}�_��ʽ�ɷN��������ƽ��λ��ͨ�^RST(9)���c�ԴVcc��ͨ�����F�ġ����I�քӏ�λ�·Ҋ�D2-5������r��l����11.0592MHZ�rCȡ10uF,Rȡ10k����
�D3-5 STC89C51���
3.2.5 STC89C51�Д༼�g����
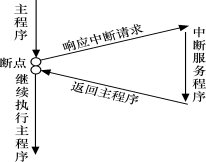
�Д༼�g��Ҫ���ڌ��r�O�y�c�����������Ҫ���Ƭ�C�ܼ��r��푑��Д�Ո��Դ����ķ���Ո����������������푑����������r̎��������@����Ƭ�ȵ��Д�ϵ�y�팍�F�����������Д�Ո��Դ�l���Д�Ո��r�����������Д�Ո�����S�������Ƭ�C���r��ֹ��ǰ���ڈ��е��������������D���Д����̎������̎���Д����Ո����������Д����̎������̎�����Д����Ո��������ٻص�ԭ������ֹ�ij���֮̎�����c��������^�m���б��Д��������������
�D3-6�������Д�푑���̎���^��������
�D3-6 �Д�푑���̎���^��
�����Ƭ�C�]���Д�ϵ�y����Ƭ�C�Ĵ����r�g���ܕ����M�ڲ�ԃ�Ƿ��з���Ո��l���Ķ��r��ԃ�����������������Д༼�g��ȫ�����ˆ�Ƭ�C�ڲ�ԃ��ʽ�еĵȴ��F��������������ˆ�Ƭ�C�Ĺ���Ч�ʺ͌��r�ԡ�
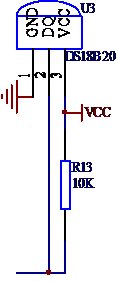
3.3 DS18B20�ضȲɼ��· DS18B20������DALLAS�댧�w������˾�Ƴ��Ćο������ֻ����ܼ��ɜضȂ�������������ο���(1-Wire)��DALLAS��˾��һ헌��м��g,�����Æθ���̖��,�Ȃ�ݔ�r��ւ�ݔ����,���Ҕ�����ݔ���p���,���й�ʡI/O�ھ��YԴ������Y�������������ɱ����������ڿ����Uչ�;S�o���T�����c�������
3.3.1 DS18B20 �����c���Ȳ�����
���c���£�
��1�����ê��صĆο����ӿڷ�ʽ������ֻ��һ����̖���c���������B�����F�������p��ͨ�ţ�����Ҫ�ⲿԪ�������
��2���y���Y��ֱ��ݔ�����֜ض���̖���Ԇο������Ђ��ͽo��������ͬ�r�ɂ���CRCУ�a������ИO���Ŀ��ɔ_�m�e�������
��3��֧�ֶ��c�M�W���ܣ�����DS18B20���Բ���Ψһ���������ϣ����F�M�W���c�y������
��4���m��늉�������3.0-5.5V����������Ҫ����Դ�����Ô��������������ضȜy��������-55��~125�棬-10��~85��r�y�����Ȟ��0.5�������
��5��ͨ�^���̿Ɍ��F9~12λ�Ĕ���ֵ�x����ʽ�������Ŀɷֱ�ضȷքe��0.5�棬0.25�������0.125�棬0.0625�棬���F�߾��Ȝy�أ�
��6��ؓ������������Դ�O�Խӷ��r��оƬ������l����������������������������
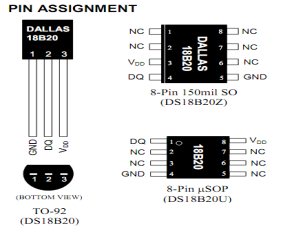
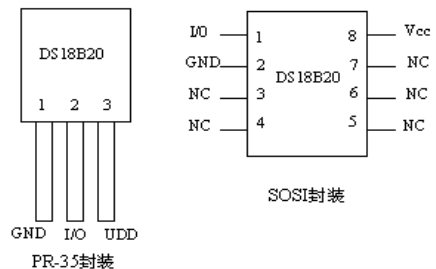
���b�D���Ȳ����죬���D3-7��3-8��ʾ
�D3-7 DS18B20�ⲿ�Y����D
3.3.2���_���ܽ�B
NC:�����_,�ҿղ�ʹ��;
VDD:���x�Դ�_,�Դ늉�����3~5.5V�������ڼ����Դ�r,�����_���ӵ�;
I/O:����ݔ��/ݔ���_,©�O�_·,���B�¸��ƽ��
DS18B20����3�_TO-92���b��8�_SOIC��CSP���b��ʽ�������D2-8��ʾ��DS18B20�ăȲ��Y����D�����������Ҫ���������Դ��������ضȂ�����������64λ���ROM���ο����ӿڡ�������g�����ĸ��ٕ��������Ⱥ���{ʽRAM�������惦�c����߉���������ڴ惦�Ñ��O���Ĝض�������ֵ��TH��TL�|�l�����Y���Ĵ���������8λѭ�h����У�a��CRC���l�����Ȱ˲����������
�D3-9 DS18B20�ķ��b
3.3.3 DS18B20�Ĺ���ԭ��
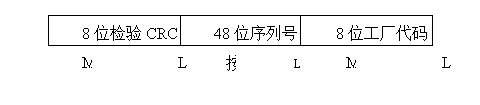
64λROM�ĽY����D3-10��ʾ���_ʼ8λ�ǮaƷ��͵ľ�̖��������ÿ������Ψһ����̖����48λ��������8λ��ǰ��56λ��CRC�z�a���@Ҳ�Ƕ���DS18B20�ɲ��Æξ��M��ͨ�ŵ�ԭ����ʧ�ԜضȈ��|�l��TH������TL��������ͨ�^���̌����Ñ�����¾�������
DS18B20�ضȂ������ăȲ��惦��߀����һ�����ٕ���RAM��һ������ʧ�ԵĿ�늲�����EEPROM�����
���ٕ���RAM�ĽY��λ9�ֹ��Ĵ惦�����Y����D2-12��ʾ������ǰ�ɂ��ֹ������y�Üضȵ���Ϣ��3����4�ֹ���TH��TL�Ŀ�ؐ�������ʧ�ģ�ÿ����늏�λ�r��ˢ�����������5�ֹ������üĴ���������������ڴ_���ض�ֵ�Ĕ����D�Q�l������DS18B20�����r���˼Ĵ����еķֱ��ʌ��ض��D�Q���������ȵĔ�ֵ��ԓ�ֹ���λ�Ķ��x��D2-13������5λһֱ��1���TM�ǜyԇģʽλ������������O��DS18B20�ڹ���ģʽ߀���ڙz�yģʽ�����DS18B20���S�r����ԓλ���O�Þ�0�������Ñ���Ҫȥ�Ą��������R1��R2�Q���ض��D�Q�ľ���λ������������Á��O�÷ֱ��ʣ�
��Ƭ�C����ͨ�^�ξ��ӿ��x��ԓ���������Ĕ����r��λ��ǰ��������λ�ں��������������ʽ��0.0625��/LSB��ʽ��ʾ�������
��3-1�Dz��֜ض�ֵ�����Ķ��M�Ɯضȱ�ʾ�����������
��3-1 DS18B20�ض��c��ʾֵ������
DS18B20��ɜض��D�Q�Ͱќy�õĜض�ֵ�cRAM�е�TH����TL�ֹ����������������T>TH��T<TL�������t��ԓ�����ȵĈ�־λ��λ�������������C�l���Ĉ�������������푑��������������ö���DS18B20ͬ�r�y�ÜضȲ��M�Ј����������
��64λROM�������Ч�ֹ��д惦��ѭ�h�����z�a��CRC����������C����ROM��ǰ56λ��Ӌ��CRCֵ�����c����DS18B20��CRCֵ�����^�������Д����C�յ���ROM�����Ƿ����_����
�P��DS18B20�Ĺ���ԭ���@��Ͳ��ٶ��f����и��dȤ�Ŀ��Բ�����P�փ�������
DS18B20�ľ���ָ��
DS18B20��ָ���У��xROM��33H����ƥ��ROM��55H�������^ROM��CCH��������ROM��F0H������������ECH���������D�Q��44H�������ȕ�������BEH���������������4EH�������ƕ�������48H�������{E2PROM��B8H��������x��늷�ʽ��B4H�����P���@Щָ��@��Ҳ����һһ��B�����ֻ�ѱ��OӋ�õ����÷��fһ�¡�
CCH-���^ROMָ�����64λROM��ַ�����ֱ����DS18B20�l�ض�׃�Q����m����һ���ęC������
44H-�ض��D�Qָ�����DS18B20�M�Мض��D�Q�������12λ�D�Q�r���L��750ms��9λ93.75ms���������Y������Ȳ�9�ֹ���RAM�С�
BEH-�x������ָ����������x�Ȳ�RAM��9�ֹ��ĜضȔ�������
��D2-14��ʾ������DS18B20���·�еĽӰl��������OӋ���õ��džΪ��Դ��늷�ʽ�����挢��B�乤���r����������й����r��D���Ժ������֪��ԓ�@�ӿ���DS18B20�������
�D3-11 DS18B20�Ĺ����·
3.3.3 DS18B20�����r��
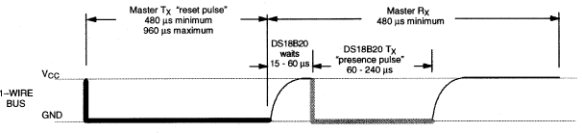
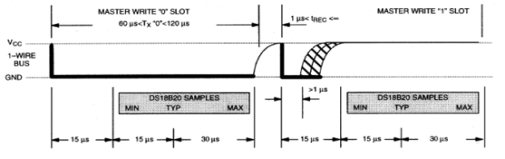
��ʼ���r��������������C���ο���P30��߉������߉�͕r������������һ�����r϶���������еČ��r϶�����60~120us��ɣ�����ÿ��ѭ�h֮�g������Ҫ1us�Ļ֏͕r�g��������0�͌�1�r϶��D��ʾ����ڌ�0�r϶���g�������������������r϶�Ќ��������ͣ�����1�r϶���g������������������������Ȼ���ڕr϶��ʼ��15us֮ጷſ������r��D��D3-15��ʾ�����
�D3-15 ��ʼ���r��D
���w���E���£�
��1�����������ø��ƽ1��
��2���ӕr���r�g���M����Щ�����
��3���������������ƽ0�������
��4���ӕr750 ��s(ԓ����������480��960��s)��
��5�����������ø��ƽ1�������
��6���ӕr�ȴ����������ʼ���ɹ��t��15��60ms�Ȯa��һ����DS18B20���صĵ��ƽ0��������ԓ��B���Դ_�����Ĵ�����������Ǒ�ע������������ܟo�صȴ������Ȼ��ʹ�����M����ѭ�h�����������Ҫ�M�г��r�Д����������CPU�x���������ϵĵ��ƽ0��������߀Ҫ�M���ӕr�����ӕr�ĕr�g�İl�����ƽ���𣨵�5�����ĕr�g��������Ҫ480��s��
��7�����������ٴ����ø��ƽ1��Y�������
1.�����r��
�����C���ο���P30��߉������߉�͕r��������һ�����r϶�����еČ��r϶�����60~120us����������ÿ��ѭ�h֮�g������Ҫ1us�Ļ֏͕r�g�������0�͌�1�r϶��D��ʾ��������ڌ�0�r϶���g���������������r϶�Ќ��������ͣ�����1�r϶���g������������������������Ȼ���ڕr϶��ʼ��15us֮ጷſ�������r��DҊ�D3-16��ʾ���
�D3-16 �������r��D
���w���E���£�
��1�����������õ��ƽ0��
��2���ӕr�_���r�g��15��s��������ĵ�λ����λ�����l�͔�����һ��ֻ�l��һλ������
��3���ӕr�r�g��45��s��
��4�����������������ƽ1��
��5���؏ͣ�1������5�����E�����ֱ���l���������ֹ���
��6������������ߵ�1����
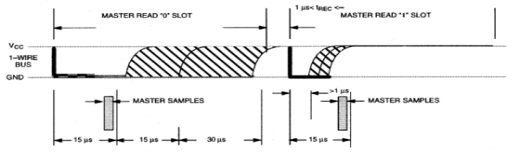
2.�x�����r��
DS18B20�����H�����C�l���x�r϶�r������������C��ݔ�������������������C�l���x�����������������R�Ϯa���x�r϶�������Ա�DS18B20�܉��ݔ��������������е��x�r϶������Ҫ60us�������ڃɴΪ������x�r϶֮�g��������Ҫ1us�Ļ֏͕r�g�����ÿ���x�r϶�������C�l���������Ϳ���1us�����������C�l���x�r϶֮�������DS18B20�������_ʼ�ڿ����ϰl��0��1��������DS18B20�l��1�������t���ֿ�������ƽ�����l�͞�0���t���Ϳ������l��0�r�����DS18B20��ԓ�r϶�Y����ጷſ�������������茢�������������ƽ��B�������DS18B20�l���Ĕ������������ʼ�r϶֮����Ч�r�g��15us����������C���x�r϶���g�����ጷſ������������ڕr϶��ʼ���15us֮�Ȳɘӿ����Ġ�B�����r��DҊ�D3-17��ʾ���
�D3-17 �x�����r��D
���w���E����:
��1�������������ߵ�1�����
��2���ӕr2��s�����
��3�������������͵�0����
��4���ӕr6��s���
��5�������������ߵ�1�������
��6���ӕr4��s�������
��7���x�������Ġ�B�õ�һ����Bλ�����M�Д���̎�����
��8���ӕr6��s�������
��9���؏ͣ�1������7�����E�����ֱ���xȡ��һ��������
3.4 ���a�����@ʾ�·
3.4.1 ���a�����·
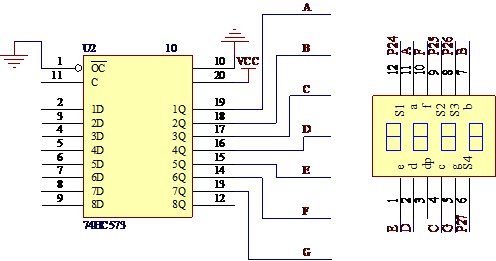
���·���@ʾ��ģ�K����74HC573оƬ����ɵ��������74HC573������·D �����i���������ÿ���i�������Ъ�����D ��ݔ�������Լ��m���������đ��õ����Bݔ�������������i��������һ���i��ʹ�ܣ�LE���˺�һ��ݔ��ʹ�ܣ�OE����������
������LE��ߕr��������Dnݔ�뵽�i����������ڴ˗l���£��i�����M����ģʽ������Ҳ�����f����i������ݔ����B�����S��������Dݔ��ÿ�ε�׃������׃��������LE��͕r���i�������惦Dݔ���ϵ���Ϣһ�ξ;w�r�g���ֱ��LE���½����R���
������OE��͕r����8���i�����ă��ݿɱ�����ݔ����������OE��ߕr����ݔ���M�����B��OE�˵IJ�������Ӱ��i�����Ġ�B��
74HC573���ԣ�
��1��ݔ��ݔ���ֲ���оƬ���b�ăɂ������̎�����ṩ����Ľӿ�
��2����������������Ӌ��C��ݔ��ݔ����
��3�����B����ݔ���������������đ���
��4���������Bݔ��ʹ�ܶ�
��5��߉�����c74HC563��74HC373��ͬ
��6����ѭJEDEC�˜�no.7A
��7��ESD���o
3.4.2 ���a���@ʾ�·
���·���@ʾģ�K��Ҫ��һ��4λһ�w��7��LED���a�ܘ��ɣ������@ʾ�y�����Ĝضȼ���ǰ�ęnλ������һ����ꎘO�Ĕ��a�ܣ�ÿһλ���a�ܵ�a,b,c,d,e,f,g��dp�˶������B����һ������������ڽ��Ն�Ƭ�C��P0�ڮa�����@ʾ�δa����S1���S2���S3��S4���_�˞���λ�x�����������ڽ��Ն�Ƭ�C��P2�ڮa����λ�x�a��������ϵ�y���ÄӑB���跽ʽ�������跽ʽ������ӿ��·�����Д��a�ܵ�8���Ȅ���a~g��dpͬ�����B��һ�������ÿһ�����a�ܵĹ����OCOM���Ԫ�������I/O����������CUP���ֶ�ݔ�����ͳ����ʹa�r��������Д��a�ܽ��յ���ͬ�����ʹa��������������Ă����a������������tȡ�Q��COM�ˡ�COM���c��Ƭ�C��I/O�ӿ����B��������Ɇ�Ƭ�Cݔ��λλ�x�a��I/O�ӿڣ����ƺΕr��һλ���a�ܱ��c��������݆���c�����a�ܵ�λ�����^��������ÿλ���a�ܵ��c���r�g�O��̕��������������˵�ҕ�X�����F�������o�˵�ӡ�����һ�M�����@ʾ�Ĕ��a�������ӑB��ʽ�ă��c��ʮ�����@��������������ʡ�����ڄӑB�����^���У��κΕr��ֻ��һ�����a����̎�ڹ�����B�ġ����wԭ��D��D3-18��ʾ
�D3-18 ���a���@ʾ�·
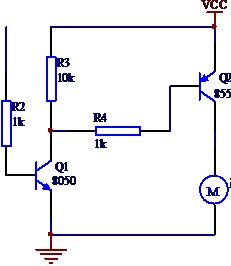
3.5 �L�����· �L�ȵ��Ӳ��õ��ǃɂ����O����������܌���̖�Ŵ��������Ȼ���ݔ���L���D��ԓģ�K�·��
�D3-19 �L����ģ�K
���O��������Ŵ��������������O��������քe������늘OC����������OB����l��OE��������ֳ�NPN��PNP�ɷN���҂��H��NPN���O�ܵĹ��l��O�Ŵ��·�������f��һ�����O�ܷŴ��·�Ļ���ԭ�����
��1������Ŵ�
����ķ����H����NPN�����O�����������ψD��ʾ��������҂��яĻ��OB�����l��OE������������O���Ib����яļ�늘OC�����l��OE�����������늘O��� Ic�������@�ɂ�����ķ����������l��O�ģ����l��OE�Ͼ�����һ�����^����ʾ����ķ�������������O�ܵķŴ����þ��ǣ���늘O����ܻ��O����Ŀ��ƣ����O�Դ �܉��ṩ�o��늘O����������Ԓ���������һ��O�����С��׃���������������늘O����ܴ��׃������׃���M��һ���ı����Pϵ����늘O�����׃�����ǻ��O���׃ �����Ħ±�������������׃�����Ŵ��˦±�����������҂��Ѧ½������O�ܵķŴ�����һ���h����1����������ʮ������װ٣���������҂���һ��׃����С��̖�ӵ����O���l�� �O֮�g�����@�͕�������O���Ib��׃����Ib��׃�����Ŵ��������������Ic�ܴ��׃�����������늘O���Ic�����^һ�����R�ģ���ô����늉�Ӌ�㹫ʽ U=R*I ���������������@�����늉��͕��l���ܴ��׃����������҂����@������ϵ�늉�ȡ��������͵õ��˷Ŵ���늉���̖�������
��2��ƫ���·
���O���ڌ��H�ķŴ��·��ʹ�Õr�������߀��Ҫ�Ӻ��m��ƫ���·�������@�Ўׂ�ԭ��������������������O��BE�Y�ķǾ��ԣ��ஔ��һ�����O�ܣ�����������O��������ݔ��늉� ��һ���̶Ⱥ���ܮa�������ڹ�ܣ���ȡ0.7V���������O�c�l��O֮�g��늉�С��0.7V�r������O����Ϳ����J����0������������H��Ҫ�Ŵ����̖�����h�� 0.7VҪС���������ƫ�õ�Ԓ���@ôС����̖�Ͳ�����������O����ĸ�׃�����С��0.7V�r��������O�������0��������҂����������O�ܵĻ��O�ϼ���һ �����m�����������ƫ��������ψD���ǂ����Rb�����Á��ṩ�@������ģ����������������Oƫ����裩�������ô��һ��С��̖���@��ƫ������B����һ��r��С ��̖�͕����»��O�����׃���������O�����׃������͕����Ŵ��ڼ�늘O��ݔ���������һ��ԭ�����ݔ����̖������Ҫ������������]�м�ƫ�������ôֻ�Ќ���Щ���ӵ� ��̖�Ŵ����pС����̖�oЧ�����]��ƫ�Õr��늘O�����0������������ٜpС�ˣ�������������ƫ�ã�������늘O��һ�����������ݔ��Ļ��O���׃С�r�����늘O ����Ϳ��ԜpС��������ݔ��Ļ��O�������r�������늘O����������������@�ӜpС����̖���������̖�����Ա��Ŵ��������
��3���_�P����
�����f�f���O�ܵ����r�������������ǘӵĈD�������ܵ���� Rc�����ƣ�Rc�ǹ̶�ֵ�������ô��������U/Rc����������U���Դ늉�������늘O����Dz��ܟo��������ȥ������������O�����������ʹ��늘O����^�m���� �r��������O�ܾ��M����͠�B��һ���Д����O���Ƿ�͵Ĝʄt�ǣ�Ib*�¡�Ic�����M��͠�B֮���������O�ܵļ�늘O���l��O֮�g��늉�����С��������������� һ���_�P�]����������@���҂��Ϳ��������O�܁������_�Pʹ�ã������O�����0�r������O�ܼ�늘O�����0���@�������O�ܽ�ֹ����������ஔ���_�P���_����������O����� ������������������O��͕r���ஔ���_�P�]������������O����Ҫ�����ڽ�ֹ��͠�B�����ô�@�ӵ����O���҂�һ����������_�P�ܡ�
�D3-20 ���O�����_��B
3.6 ���Iģ�K ��Ƭ�C�I�P�Ъ����I�P�;��ʽ�I�P�ɷN�������I�Pÿһ��I/O ����ֻ��һ�����I��������I����һ�˽��Դ��ӵأ�һ��ӵأ����@�N�ӷ�������^������ϵ�y���ӷ��������������ʽ�I�Pʽ�ӷ�������^���s��������ռ�õ�I/O�١��������OӋ����Ҫ�@���x���˪���ʽ�I�P�ӷ��������
����ʽ�I�P�Č��F���������Æ�Ƭ�CI/O���xȡ�ڵ��ƽ�ߵ́��Д��Ƿ����I����������������_���I��һ�˽ӵأ���һ�˽�һ��I/O �ڣ������_ʼ�r����I/O�����ڸ��ƽ���ƽ�r�o�I���rI/O�ڱ��o���ƽ�����������I���r������I/O ���c�ض�·��ʹI/O �ڞ���ƽ������Iጷź���������Ƭ�C�Ȳ����������ʹI/O����Ȼ���ָ��ƽ���҂���Ҫ���ľ����ڳ����в錤��I/O�ڵ��ƽ��B�Ϳ����˽��҂��Ƿ��а��I�����ˡ�
���Æ�Ƭ�C���I�P̎���ĕr���漰����һ����Ҫ���^��������Ǿ����I�P��ȥ���ӡ��@���f�Ķ����ǙCе�Ķ��ӣ��Ǯ��I�P��δ�������µ��R��^�a�����ƽ����������������F��������������҂��ڰ��I�rͨ�^ע����Ա���ġ��@�N����һ��10~200����֮�g���@�N�������ƽ�Ķ��ӕr�g�����ˁ��f̫�������������ڕr�����Ć�Ƭ�C���Ԅt�����L���������Ӳ��ȥ���Ӿ����ò����·�����Ӳ��ּ�֮̎�������ܛ��ȥ���Ӳ���ȥ����������������DZܶ��Ӳ��ֵĕr�g�����I�P�������ٌ���̎�������������@���x����ܛ��ȥ���ӣ����F�����Ȳ錤���I���е��ƽ���F�r�����ӕr10~200�����Ա��_���ӣ�����ֵ��20���룩���ӕr�Y�������xһ��I/O �ڵ�ֵ�����@һ�ε�ֵ�����1 ��ʾ���ƽ�ĕr�g����10~200 ���������ҕ��ɔ_��̖��������x����ֵ��0�r�t��ʾ�а��I���������{��������̎���������Ӳ���·��D3-21��ʾ��
�D3-21 ���Iģ�K�·�D
��4�� ϵ�yܛ���OӋ
4.1 ܛ����B
4.1.1 Keil C51
Keil C51������Keil Software��˾��Ʒ��51ϵ�м��݆�Ƭ�CC�Z��ܛ���_�lϵ�y����c�R����ȣ�C�Z���ڹ������������Y�����������x�ԡ��ɾS�o���������@�ă�����������W�����������^�R���Z�Ժ���ʹ��C���_�l��������w��������̡� Keil C51ܛ���ṩ�S���Ď캯��������ļ����_�l�{ԇ���ߣ�ȫWindows��������������Ҫ��һ�c���ֻҪ��һ�¾��g�����ɵąR�����a�������w����Keil C51���ɵ�Ŀ�˴��aЧ�ʷdz�֮�ߣ������Z�����ɵąR�����a�ܾo�����������⡣���_�l����ܛ���r�����w�F���Z�Եă��������������Ԕ����BKeil C51�_�lϵ�y�����ֹ��ܺ�ʹ������ Keil_cܛ��������D4-1��ʾ
�D4-1 Keil_cܛ������
4.1.2 Protel99SE
Protel99SE��PORTEL��˾��80���ĩ�Ƴ���EDAܛ����Protel99SE�Ǒ�����Windows9X/2000/NT����ϵ�y�µ�EDA�OӋܛ������������OӋ�����ģʽ�����ԾW�OӋ������к��Ĕ������Q�������_���Լ�3Dģ�M������������һ��32λ���OӋܛ�������������·ԭ��D�OӋ��ӡ���·���OӋ�Ϳɾ���߉�����OӋ�ȹ�������������OӋ32����̖�ӣ�16���Դ--�،Ӻ�16���C�ӹ��������
Protel99SEܛ�������c��
(1) ������30��N��ʽ��늚��B�ӾW�j����
(2) �����ȫ�־�����������
(3) ��ԭ��D���x��һ�������������PCB��ͬ�ӵ�����Ҳ�����x�У�
(4) ͬ�r�\��ԭ��D��PCB����ڴ��_��ԭ��D��PCB�D�g���S�p�����Ԫ�������������_���W�j
(5) �ȿ����M������ע�Ԫ������̖����ԭ��D��PCB������Ҳ�����M�з���עጣ���PCB��ԭ��D����������Ա���늚�ԭ��D��PCB���OӋ�ϵ�һ�������
(6) �M����H���OӋҪ�������˘��}��ݔ���������GB4728���ˎ죩�� * �������õĔ����������Ϸ��棨����SPICE 3f5��������
(7) ֧����CUPL�Z�Ժ�ԭ��D�OӋPLD�����ɘ˜ʵ�JED���d�ļ������ * PCB���OӋ32����̖�ӣ�16���Դ-�،Ӻ�16���C�ӹ���������
(8) ����ġ�Ҏ�t�ӡ��OӋ�h����������ھ��ĺ���̎�����OӋҎ�t�z��������
(9) ���ܸ��~���ܣ���♿����Ԅ�������
(10)�ṩ�����Ĺ��I���˜��·�������OӋģ������ Protel99SE�Ĺ���������һ�N�˜ʵ�Windows���棬��D��ʾ�������������}����������ˆ��������˜ʹ��ߙڡ��L�D���ߙ���������B�ڡ������x���o���A�[����λ���ư��o��������M�̿��ư��o��������A�[���ڡ������x�������������D�ξ����������
�D4-2 Prtel99SEܛ������
4.1.3 Proteus
Proteus��Ŀǰ��õ�ģ�M��Ƭ�C��������Ĺ������������Է���51 ϵ�С�AVR��PIC �ȳ��õ�MCU ��������·����LCD����RAM���ROM���I�P���R�_���LED����AD/DA������SPI ����������IIC ������
Proteus �c������Ƭ�C����ܛ����ͬ��������������H�ܷ����Ƭ�CCPU �Ĺ�����r��Ҳ�ܷ����Ƭ�C����·��]�І�Ƭ�C���c�������·�Ĺ�����r������ڷ���ͳ����{ԇ�r���P�ĵIJ�����ijЩ�Z����Еr��Ƭ�C�Ĵ����ʹ惦�����ݵĸ�׃�����ǏĹ��̵ĽǶ�ֱ�ӿ������\�к��·�������^�̺ͽY���������@�ӵķ��挍��������ij�N���x���v���Ǐ��a�ˌ����̑����gÓ����ì�ܺͬF��
�\��proteus ��ISIS �����������M��ԓ����ܛ���������档�ڹ���ǰ��Ҫ�O��view �ˆ��µIJ����R��system�µ��ɫ����D�ν����С���Ŀ�������ͨ�^���ߙ��е�p(�Ď����x��Ԫ������)����������pick devices �������x���·�����Ԫ������������Ԫ�����{��������λ�ã�Ԫ�������O�������Ԫ�����g�B�����������������source �ˆε�Definecode generation tools �ˆ���������������x������g�Ĺ��ߡ�·�����Uչ�����Ŀ����source �ˆε�Add/removesource files �����£������Ƭ�CӲ���·�Č������������ͨ�^debug �ˆε�����������������·���\����r��
- Proteus ܛ�����ṩ��Ԫ���YԴProteus ܛ�����ṩ��30 ����Ԫ���죬��ǧ�NԪ�������Ԫ���漰�����ֺ�ģ�M��������ֱ���ȡ�
- Proteus ܛ�����ṩ�ăx���YԴ
����һ������ܛ���������������yԇ�ăx���x���Ĕ����������ͺ��|������Ǻ���������Ƿ�ϸ��һ���P�I���ء���Proteus ܛ����������������ͬx��ʹ�Ô����Ć��}������Proteus ߀�ṩ��һ���D���@ʾ���ܣ����Ԍ���·��׃������̖�����ԈD�εķ�ʽ���r���@ʾ������������������cʾ�������Ƶ����ܸ��ࡣ
Proteus �ṩ�˱��^�S���Ĝyԇ��̖�����·�Ĝyԇ������@Щ�yԇ��̖����ģ�M��̖�͔�����̖�����چ�Ƭ�CӲ���·��ܛ�����{ԇ����Proteus �ṩ�˃ɷN������һ�N��ϵ�y���w����Ч�������һ�N�nj�ܛ���ķֲ��{ԇ�Կ����w�Ĉ�����r������
���ڿ��w����Ч�����{ԇ������ֻ��Ҫ����debug �ˆ��µ�execute �ˆ�헻�F12 ����I���ӈ���������debug�ˆ��µ�pause animation �ˆ�헻�pause �I��ͣϵ�y���\����������debug �ˆ��µ�stop animation �ˆ�헻�shift-break �M���Iֹͣϵ�y���\����������\�з�ʽҲ�����x�ߙ��е����������M���������
����ܛ���ķֲ��{ԇ�����Ȉ���debug �ˆ��µ�start/restart debugging �ˆ������������˕r�����x��stepover ��step into �� step out ������г���(�����ÿ���IF10�����F11 ��ctrl+F11)�����е�Ч���džξ������������M���ӳ�����к������ӳ������������ڈ�����start / restart debuging ��������������debug �ˆε�����Ҫ���F���������漰����ܛ���б��͆�Ƭ�C��ϵ�y�YԴ�������ɹ��{ԇ�r�����Ͳ鿴��
�D4-3 proteusܛ������
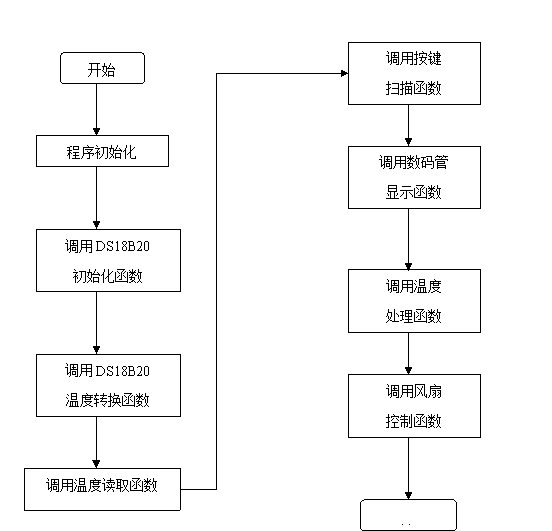
4.2 ���������̈D
Ҫ���F������ǰ�ضȌ��r�Ŀ����L�ȵĠ�B�������Ҫ�ڳ����в��r���Дஔǰ�ض�ֵ�Ƿ��^�O���Ą����ض�ֵ���������چ�Ƭ�C�Ĺ����l�ʸ��_12MHz�����ڈ��г���r��������ǰ�ضȺ��O�������ض��M�б��^�Д���������^�O���ض�ֵ�����r���r���Dȥ���г���̎����Ƿ��̎���ӳ������L�Ȍ��r���ГQ���P�]��������L�����L������B���
�@ʾ�ӳ����Բ��߶δaȡ�ø����a�ܑ��@����������λ�����@ʾ�����������̈D��D4-4��ʾ�����
�D4-4 ���������̈D
4.3 DS18B20�ӳ������̈D
�Ȍ�DS18B20��ʼ�������M��ROM��������������������܌��惦����������������������DS18B20ÿһ��������Ҫ��ѭ����Ĺ����r���ͨ�Ņf�h�������C����DS18B20��ɜض��D�Q�@һ�^���������DS18B20��ͨӍ�f�h������횽��������E��ÿһ���x��֮ǰ��Ҫ��DS18B20�M�Џ�λ�������λ�ɹ���l��һ�lROMָ���������l��RAMָ��@�Ӳ��܌�DS18B20�M���A���IJ�����
�D4-5 DS18B20�������̈D
4.4 ���a���@ʾ�ӳ������̈D
���F�Ĺ����nj���DS18B20�xȡ�Ķ��M�Ɯض�ֵ�D�Q���߶δa��LED���@ʾ�������@ʾ��ʽ���õ��DŽӑB����ķ�ʽ����Ƚoλ�x��̖������ٽo���x��̖������Ȼ���ӕrһ������������w���̈D��D4-6
4.5 ���I�ӳ������̈D
Ӳ���OӋ�Ϟ�ͨ�^3�����I������ɰ��I�����ӳ���KEYSCAN�ӳ����ṩܛ��֧�����������һ���O���IK1��������M��ض������O�ã��˕r���¡��ӡ��IK2�����һ����������¡��p���IK3���p1���ٰ�һ���O���IK2�������M��ض������O�à�B�������˕r���¡��ӡ��IK2�������һ����������¡��p���IK3�����p1�����ބ����ض�ֵTL�����ބ����ض�ֵ���O�÷�����10-100�z�϶������M��һ��ʹ��Ҫ����������ٰ�һ���O���IK3�˳������ޜض��O�à�B�����
��5�� ϵ�y�{ԇ
5.1 ܛӲ���{ԇ
5.1.1 ���I�@ʾ���ֵ��{ԇ
��������OӋ������ϵ�y��������I�P�ӿڲ���P3����������a���@ʾ����P0�ڿ���LED�Ĕ�a�������P2�ڿ���LED��λ�a���Ķ����F�I�P���ܼ����a�ܵ��@ʾ�����^���g�]�г��e�����ڷ����{ԇ�r���������a���@ʾ��ֻ�ǁy�a������]�����_���@ʾ�ض�����������I����Ҳ���`�������������I�r���@ʾ��׃���ܶ�����
���^���ҷ����������l�F�I�P�������]�Л]�а��I������������������I�ڰ����c���֕r����������һ���̶ȵĶ��ӣ��Ķ�����ʹ��Ƭ�C�����e�`���Д����������°��I�l���A�O�ضȕrʧ�`�������������������������������˱���ڰ��I��������м���������������������ڰ��I�����c���֕r�����ӕr�Д�������ԙz�y�I�P�Ƿ���İ��»�����ȫ����������
���a�ܲ������_���@ʾ���������Ҫ��������Ԕ��a�ܵĶδa����P0�ڂ���������������a���@ʾ�ֲ����˄ӑB����ķ�ʽ�����ڳ����Ѕs�]���O���@ʾ�δa�ĕ����������®�P0�ڂ��Ͷδa�r�l����y����������_�R�e�δa�������ϵ�y�м����i����������������ڳ������O���惦�δa�Ŀ��g�����
���I�P��������������������a���@ʾ�����м����˶δa�Ĵ惦���g���a���܉��������@ʾ�����IҲ�܉�����������_�����^�õ�Ч��������
5.1.2 ������DS18B20�ضȲɼ������{ԇ
���ڔ���ʽ���ɜضȂ�����DS18B20�ĸ߶ȼ��ɻ�����ܛ�����OӋ���{ԇ�����˘O��ĺ������С�w�e�������ġ��߾��Ȟ����늙C�ľ��Ⱥͷ����ṩ�˿������ܛ���OӋ����P1.6�ڞ锵�֜ض�ݔ��������������Ҫ��ݔ��Ĕ�����̖�M��̎��������@ʾ��������Ķ����˜ض��D�Q���������ͨ�^ܛ���OӋ������F�ˌ��h���ضȵ��B�m�z�y������Ӳ��LED����������������ֻ�@ʾ���A�O�ضȵ�������������
�ڜض��D�Q�����У������܉����_�ęz�y���@ʾ�ضȵ�С��λ��������аљz�y�Ĝض��c10��˺������ٰ�һ����λ��������̎�������24.5׃��245��̎��������@�Ӟ����ľ��������˷��㡣
ϵ�y�{ԇ�О���CDS18B20�Ƿ�����ϵ�y���Ϲ����������Ŀ��n������סоƬ���������ɰl�FLED�@ʾ��ǰ��λ�ض�ҲѸ�����������C��DS18B20����ϵ�y���Ϲ�������������DS18B20��3�����_��������{ԇ�^������ע����������_�Č���λ�ã����⌢��ӷ�����оƬ���ܹ�����������оƬ��
5.1.3 �L���{���·�����{ԇ
�ڱ��OӋ�У����������O����ֱ��늙C�������ܛ���O����P1.0��ݔ����ͬ��PWM���������ͨ�^���O�ܵķŴ�������ֱ��늙C�D�������ͨ�^ܛ���г����O�����������ͬ�ض�ݔ����ͬ��PWM��������Ķ��õ���ͬ��ռ�ձȿ����L��ֱ��늙C��������F��P1.0�ڵ�PWM����ݔ������������ضȵ����O�Üضȕr�����늙C���D�ӻ��Ԅ�ֹͣ�D����������ضȸ����O�Üضȕr��늙C���D���������Ԅ��_ʼ�D������
�ڱ�ϵ�y���L��늙C���D�ٿɌ��F�ɼ��{�����ͨ�^�ضȂ������z�y�Ĝض��cϵ�y�A�O�ض�ֵ�ı��^�����F�D��׃�Q����
5.2 ϵ�y����
5.2.1 ϵ�y���F�Ĺ���
��ϵ�y�܉F��Ƭ�Cϵ�y�z�y�h���ضȵ�׃������Ȼ������h���ضȺ��O�õ��yֵ�������L��ֱ��늙Cݔ��ռ�ձȵ�׃�������Ķ��a����ͬ���D���ٶȣ���ɸ����I�P�{����ͬ���O�Üض�������ɭh���ض��c�O�ÜضȵIJ�ֵ������늙C��������h���ضȵ����O�Üضȕr����늙Cֹͣ�D����������h���ضȸ����O�Üضȕr�����Ƭ�C����ݔ����ݔ����ͬռ�ձȵ�PWM��̖�������늙C�_ʼ�D�ӣ�ϵ�y߀�܄ӑB���@ʾ��ǰ�ضȺͮ�ǰ�ęnλ�����������ͨ�^�I�P�{����ǰ���O�Üض�������
5.2.2 ϵ�y���ܷ���
ϵ�y���w�����IJ��ց��M�������Ȱ��I�·���������a�����@ʾ�·�������ضșz�y�·���L�����·���������ȿ��V���ǜضșz�y�·���ԓ����������ϵ�y����Ҫ��������������Ҫ�z�y���h���ضȣ������Æ�Ƭ�C���Д��ضȵĸߵ����Ȼ��ͨ�^��Ƭ�C����ֱ���L��늙C���D����������늙C���·����ԓ������Ҫʹ������·����Ƭ�Cݔ����PWM��̖�D����ƽ��늉�ݔ������������ͬ��PWM���εõ���ͬ��ƽ��늉����Ķ�����늙C���D����������·���OӋ�в����˃ɂ����O�ܽM�ɏͺϹ�������������F�^�õĿ���Ч�����ٴ��ǔ��a�ܵĄӑB�@ʾ�·������ԓ���ֵĹ��܌��F���h���ضȺ͙nλ���@ʾ��������DS18B20�ɼ��h���ضȣ����I���F��ͬ�O�Üضȵ��{��������F�ˌ��h���ضȺ͙nλ�ļ��r�B�m�@ʾ����
�Y��Փ
�����OӋ��ϵ�y�Ԇ�Ƭ�C����ƺ��ģ��ԜضȂ�����DS18B20�z�y�h���ضȣ����F�˸����h���ض�׃���{����ͬ���L��늙C�D�٣�LED���a�����B�m�������@ʾ�h���ضȺ͙nλ������ͨ�^�����������I�{����ͬ���O�Üض������Ķ���׃�h���ض��c�O�ÜضȵIJ�ֵ�����M����׃늙C�D���������F�˻��چ�Ƭ�C�Ĝؿ��L�ȵ��OӋ��
��ϵ�y�OӋ���ƏV�����N늄әC�Ŀ���ϵ�y�У����F늄әC���D���{��������������a���������������ϵ�y�����ں��ε��ճ��L�ȵ����ܿ������������������������ڹ��I���a�У����Ը�׃��ͬ��ݔ����̖��������F����ͬ��̖ݔ�����늙C���D��������M�����F���a�Ԅӻ������������ϵ�y�п��Ը�����ͬ��ؓ���_����ͬ��늉���̖������늉���̖�{����ͬ�İl늙C�D�٣��M���{���l��������F���ϵ�y���Ԅӻ��{������C���������ԓϵ�y���OӋ���о���������a�������о�����Ҫ��λ���
�x �o
���I�OӋ�Y��������������@�����������Ҫ���ĵظ��x��־���ώ�һֱ�ԁ팦�҂���ָ���͎����������������Y���Č��I֪�R����֔�Ŀ������L�Ď����£��҂��������������@�ή��I�OӋ���΄���������Փ���A����������x�}������n��������Փ�����A���������ώ��������ķ��������ĵ�ָ������r���P���Ү��I�OӋ�������Mչ�������Ұ����о�����ͽ�Q�о����������S�����}�������ʹ���܉���������Փ�Ĺ�������������Լ��Ĺ������Y�្���������
���@�ή��I�OӋ���������@����W�õĴ�֪�R�õ��˳�ֵđ������������ǰ�]����ȫ���յ��y�c�õ��˽�Q��ͬ�r�������Փ�͌��`���õؽY������������B���҂��������ǵĿƌW�B�Ⱥ͇�֔�����L�����Mһ��������Լ����ԌW���������@��������ȫ̤��������҂����f����һ���ܴ���ի@���
��������Ҫ���x��������WԺ��������@����������҂������W�����S���Č��I֪�R�Ͷ�������������W�����������̎�������@������������һ�P���ؔ������ڴ������������WУ��ÿһλ�ώ����������\���x�������ףԸ��������WԺ��������ӵ��x���������
�����
���1��protelԭ��D
���2��proteus����D
������Word��ʽ�ęn51�����d��ַ����Դ�a����
����: xiehua �r�g: 2019-6-12 23:01
���������I·�̈D��ʲô�]���أ�
��������ς�һ�����
Ҳ����ֱ�ӻ؏���
�x�x��
����: contactdeshine �r�g: 2019-6-13 02:26
�@������������ö��r�ˣ�ֱ��һֱ�_���L�Ⱦͺ����������x�x
����: strelizia �r�g: 2019-11-25 16:29
���x��������W��һ���������ɫ����ʲôԪ��
����: nzhdpyh �r�g: 2020-2-24 11:30
���e���YԴ Ҫ�ǎ�ȫ���������
����: jhjnjkju �r�g: 2020-4-14 17:35
���x����
����: qq974282228 �r�g: 2020-4-27 11:55
�x�x��������������������������
����: 2905676651 �r�g: 2020-5-26 10:41
�]�г���D�ͺ��y��
| �gӭ���R (http://www.raoushi.com/bbs/) |
Powered by Discuz! X3.1 |