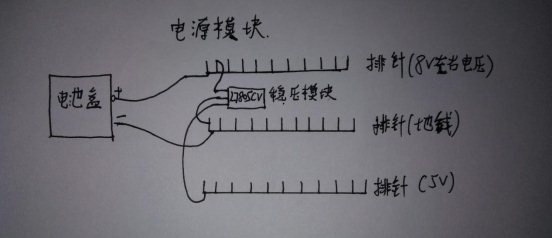
 電池模塊采用4節干電池對小車送電。電機的運行需要8V左右的電壓,而單片機、超聲波、以及紅外模塊都需要穩定的5v的邏輯電壓;因此采用L7805CV穩壓芯片輸出穩定的5v電壓。
電池模塊采用4節干電池對小車送電。電機的運行需要8V左右的電壓,而單片機、超聲波、以及紅外模塊都需要穩定的5v的邏輯電壓;因此采用L7805CV穩壓芯片輸出穩定的5v電壓。循跡小車(I題)
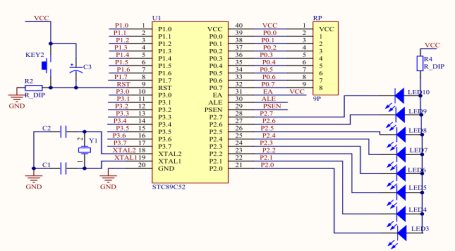
方案1:采用Atmel公司的AT89C516RD+單片機作為智能小車的主控芯片, AT89C516RD+是一種低功耗、高性能CMOS8位微控制器,工作電壓為5V,32個I/O口,具有 8K 在系統可編程Flash 存儲器。該芯片價格便宜,應用廣泛,操作簡單,硬件與軟件設計相對簡單。大學生廣泛用于單片機學習與創作。資源足夠用于智能小車的設計。因此,本設計選擇了此芯片。
方案2:采用單片機MSP430F1611作為智能小車的主控芯片,MSP430F1611是一款超低功耗單片機,工作電壓范圍為1.8V-3.6V,48 位I/O 口線,16-Bit RISC 架構,但相應硬件復雜,軟件編寫相對難度大,而且價格昂貴,用于智能小車資源過剩,造成浪費。所以我們放棄了此方案。
方案3:采用AT89C51單片機,4k字節Flash 閃速存儲器,128字節內部RAM,32 個I/O 口線,兩個16位定時/計數器,一個5向量兩級中斷結構,一個全雙工串行通信口,片內振蕩器及時鐘電路。現已被C52逐漸取代,故放棄。
本設計方案采用方案一中的易于操作的AT89C516RD+單片機作為電信號處理、控制電機驅動以及紅外尋跡功能。
(1)對單片機的程序編程與燒錄
程序采用c語言編程,通過keil uVision4軟件對程序進行調試以及對可以運行的程序生成單片機可以運行的hex文件;程序的燒錄采用stc-isp-15-v6.85燒錄軟件;用USB轉TTL小板給單片機燒錄程序。小板的RX接單片機的TX(p3.1),TX接單片機的RX(p3.0),GND接單片機的GND,VCC接單片機的VCC。但需要注意的是在用燒錄軟件給單片機燒錄程序時要用冷啟動,即先點擊‘下載/編程’按鈕,再將USB小板的VCC連接單片機的VCC。
電池模塊采用4節干電池對小車送電。電機的運行需要8V左右的電壓,而單片機、超聲波、以及紅外模塊都需要穩定的5v的邏輯電壓;因此采用L7805CV穩壓芯片輸出穩定的5v電壓。
![]()
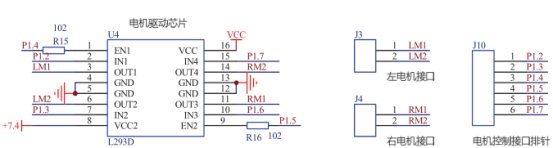
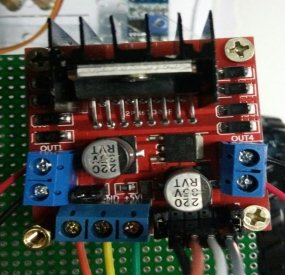 電機驅動采用L298N集成芯片與單片機和電機連接。通過單片機運行程序將高低電平送給驅動模塊從而控制電機的前進、后退、左轉、后傳、停止。電機驅動集成板自帶穩壓芯片高壓端接電源電壓(8v左右),GND接地線,然后輸出5v電壓;out1、out2用導線和左電機連接,out3、out4用導線和右電機連接。驅動模塊的IN1、IN2與單片機的p1.2、p1.3連接,IN3、IN4與單片機 的p1.6、p1.7連接。使能端ENA、ENB通過跳帽連接。
電機驅動采用L298N集成芯片與單片機和電機連接。通過單片機運行程序將高低電平送給驅動模塊從而控制電機的前進、后退、左轉、后傳、停止。電機驅動集成板自帶穩壓芯片高壓端接電源電壓(8v左右),GND接地線,然后輸出5v電壓;out1、out2用導線和左電機連接,out3、out4用導線和右電機連接。驅動模塊的IN1、IN2與單片機的p1.2、p1.3連接,IN3、IN4與單片機 的p1.6、p1.7連接。使能端ENA、ENB通過跳帽連接。
![]()
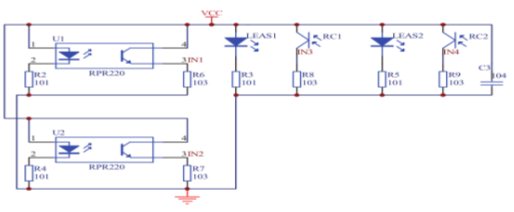
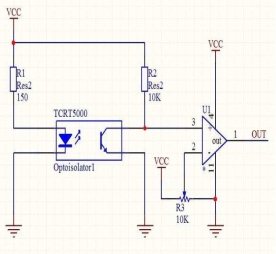 紅外尋跡采用兩個集成的紅外對管。紅外對管有發射管和接收管,發射管發射紅外線,接收管接收。一個紅外對管有3個引腳,VCC引腳接5v電平,GND引腳接地,OUT引腳輸出高低電平并通過杜邦線與單片機連接。左紅外對管與單片機p3.7引腳連接,右紅外對管與單片機p3.6引腳連接。若沒有尋
紅外尋跡采用兩個集成的紅外對管。紅外對管有發射管和接收管,發射管發射紅外線,接收管接收。一個紅外對管有3個引腳,VCC引腳接5v電平,GND引腳接地,OUT引腳輸出高低電平并通過杜邦線與單片機連接。左紅外對管與單片機p3.7引腳連接,右紅外對管與單片機p3.6引腳連接。若沒有尋
到黑線,接收管接收到反射的紅外光,光敏電阻變小,輸出低電平‘0’;若尋到黑線,接收管不能接收到紅外光,光敏電阻大小不變,輸出高電平‘1’;單片機處理高低電平并給電機驅動模塊輸出命令,從而控制電機的運行。
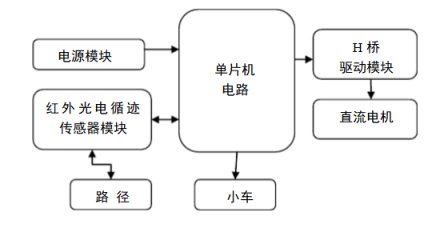
根據題目要求,把技術指標分配到方框圖或主流程圖中各部分(即各單元電路或程序模塊中)。設計各單元之間的匹配關系對各單元的技術要求。
程序有小車直走,左轉,右轉,停止,延時,尋跡子程序。
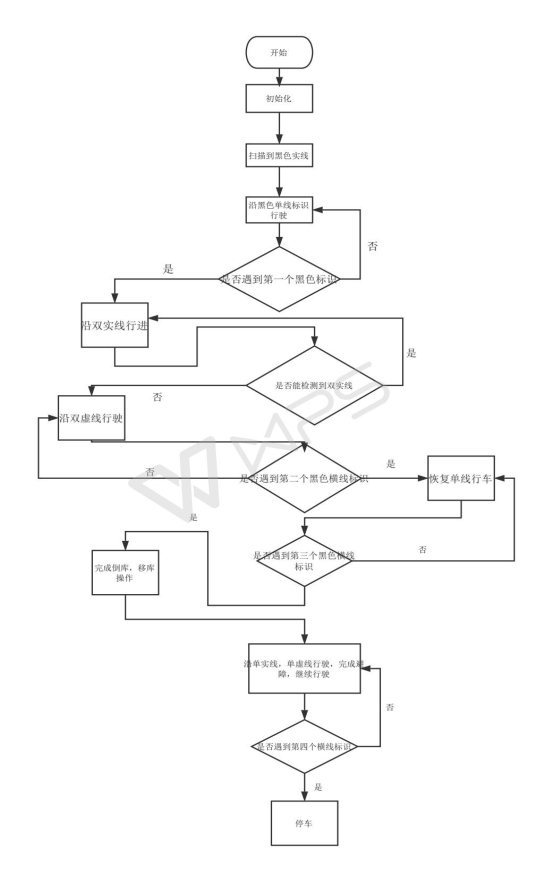
用If和while等語句將小車尋到黑跡以及走在白線上用‘0、1’表示。尋到黑跡輸出為‘1’,未尋到輸出為‘0’。‘IN1=1,IN2=0’表示小車左輪正轉;‘IN3=1,IN4=0’表示小車右輪正轉;‘IN1=0,IN2=1’表示小車左輪倒轉;‘IN3=0,IN4=1’表示小車右輪倒轉;‘IN1=1,IN2=0,IN3=1,IN4=0’表示小車直走;通過紅外尋跡模塊向單片機引腳輸出‘0、1’電平,從而單片機控制電機驅動芯片驅動電機尋跡行走。
3.2.2程序流程圖:見附錄1
根據總體設計對各單元電路的要求,實測該單元電路的對應指標。用表格的形式列出實測數據及實測時所用儀器設備的名稱、型號。有些數據最好能畫出實測曲線。要求數據、曲線必須真實。
根據題目技術要求,測試作品整體技術指標。用表格的形式列出實測數據及實測時所用儀器設備的名稱、型號。有些數據最好能畫出實測曲線。要求數據、曲線必須真實。
將設計的程序燒錄到單片機中,并用自制的賽道測試小車的行走情況;通過小車在運行中出現的問題在程序中進行更改,并繼續進行行走測試。
條件:光線正常的房間。
工具:焊槍,焊錫,螺絲,螺絲刀,小道,鉗子等。
儀器:萬用表,計算機。
結果:小車只能進行單黑線尋跡
分析:小車硬件缺少紅外收發管,只能進行黑線尋跡;軟件編程不熟練,超聲波避障程序未能調試成功。
在收到長通杯競賽通知后,憑借著心中的熱情與好奇,我們便迅速的組隊參加,但參與過程是異常艱辛與困難的,靠熱情無疑難以脫穎而出,在眾多的課題中,經過認真考慮,綜合實際因素,我們便選擇了循跡小車的題目。
由于腦中沒有絲毫頭緒,我們就瘋狂的在網絡上尋找信息,向專業性更強的伙伴求援,還購買了一個成品小車認真研究。然而制作過程仍然坎坷異常,小車的拼接算是最簡單的一個環節,但如何在有限的面板合理美觀的安裝上各種系統還是讓我們費盡了心思。另外,各模塊的焊接也是個精細活,雖然反復的修正,嘗試結果也只能算是差強人意。
當小車可以做簡單的直線運動后,我們便想讓其實現更多的功能,可程序的編寫燒入又是橫亙在我們面前的一道難題,縱然是廢寢忘食,我們也只是做出了簡單的循跡模塊。對于更加困難的功能,由于能力不足,時間緊迫,課程緊張,終究未能實現,我們實在是感到遺憾與羞愧。
最后,雖然我們的成品十分簡陋,功能不全,但這終歸是我們小組努力的成果,是我們的心血之作。我們對自己所做的感到驕傲,對未能實現的會繼續研究,完善作品。我們小組不是最強的,但我們用盡全力,堅如磐石!
 循跡小車 電子版.docx
(499.79 KB, 下載次數: 44)
循跡小車 電子版.docx
(499.79 KB, 下載次數: 44)
| 歡迎光臨 (http://www.raoushi.com/bbs/) | Powered by Discuz! X3.1 |