����(j��)�����n���O(sh��)Ӌ(j��)�ľ��wҪ��飬ʹ��LCD�@ʾ��ֱ��늙C(j��)���D(zhu��n)�٣����}Ŀ���Է��������@��(g��)�}Ŀ��(sh��)�H���ɶ���(g��)���ֽM�ɵġ�
��һ��(g��)�����Æ�Ƭ�C(j��)����ֱ��늙C(j��)���D(zhu��n)�٣����ґ�(y��ng)�ṩֱ��늙C(j��)�(q��)��(d��ng)���y(c��)���·��ʹ�Æ�Ƭ�C(j��)�(q��)��(d��ng)ֱ��늙C(j��)���y(c��)��ֱ��늙C(j��)���D(zhu��n)�٣�����ֱ��늙C(j��)��(w��n)���\(y��n)����һ��(g��)������(n��i)��
�ڶ���(g��)����ʹ��LCD�@ʾϵ�y(t��ng)�@ʾ��ֱ��늙C(j��)�ľ��w�D(zhu��n)�٣����҆�Ƭ�C(j��)���Ƶ�늙C(j��)��(sh��)�H�D(zhu��n)���cҺ���@ʾ���@ʾ�����D(zhu��n)�ّ�(y��ng)ԓ�r(sh��)�r(sh��)��(du��)��(y��ng)��
��������ϵ�y(t��ng)��(y��ng)ԓ���Д�(sh��)ģ��ģ��(sh��)�D(zhu��n)�Q�IJ��֣���?y��n)��@��(g��)ģ��(sh��)�D(zhu��n)�Q�������@��(g��)ϵ�y(t��ng)���Dz���ȱ�ٵģ���Ƭ�C(j��)���Ƶ�ֱ��늙C(j��)�D(zhu��n)�٣��ڌ�(sh��)�H�ПoՓ�nj�(du��)늙C(j��)���Ƶ���̖(h��o)��߀��늙C(j��)ݔ������̖(h��o)����(y��ng)ԓ�ǔ�(sh��)����̖(h��o)����?y��n)�ֻ�Д?sh��)����̖(h��o)���ܱ���Ƭ�C(j��)���R(sh��)�e��������Ҫ���ǣ���Ƭ�C(j��)���Ƶ�ֱ��늙C(j��)ݔ�����D(zhu��n)�ٵ���̖(h��o)ֻ���ǔ�(sh��)����̖(h��o)�r(sh��)���ܱ�Һ���@LCDģ�K���R(sh��)�e������K��(zh��n)�_���@ʾ��ֱ��늙C(j��)���D(zhu��n)�١�
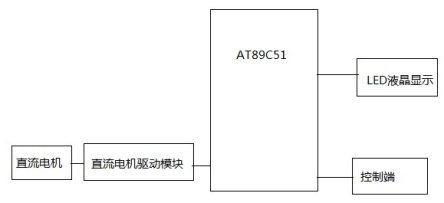
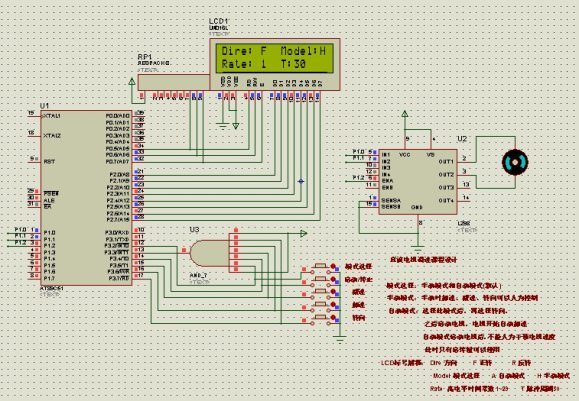
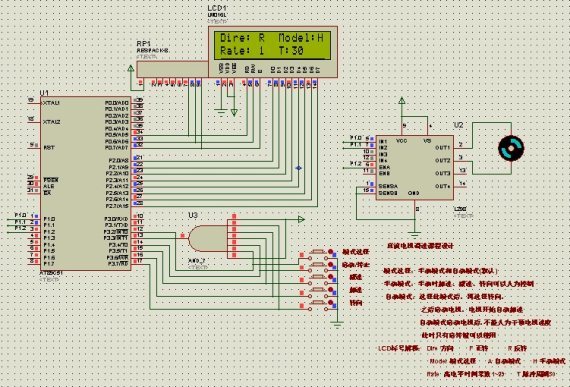
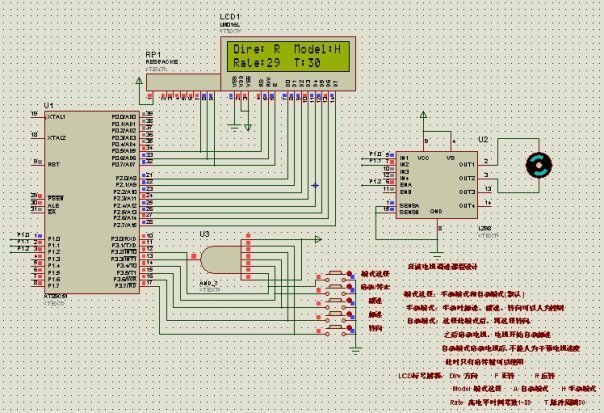
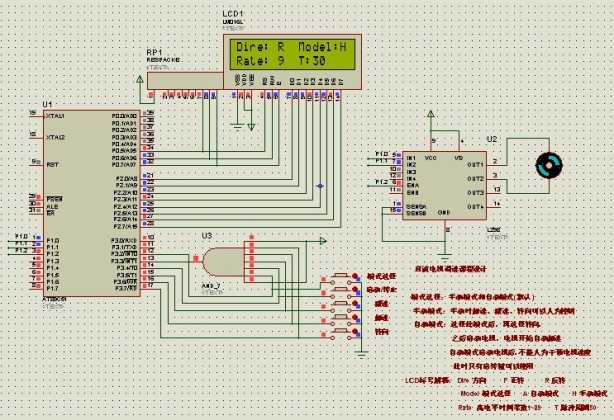
�{(di��o)��ϵ�y(t��ng)��Ӳ���O(sh��)Ӌ(j��)ԭ������D���D3-1��ʾ, ��AT89C51��Ƭ�C(j��)����ƺ���,�����y(c��)���·��PWM���ΰl(f��)������PWM�����·�Լ�LCD�@ʾ���֡�
�D3.1 Ӳ���O(sh��)Ӌ(j��)����D
3.2��Ƭ�C(j��)����ֱ��늙C(j��)���ֵ�Ӳ���O(sh��)Ӌ(j��)ֱ��늄�(d��ng)�C(j��)�Y(ji��)��(g��u)�ɶ��Ӻ��D(zhu��n)�ӃɴֽM�ɡ��D(zhu��n)����Ҫ�����Ǯa(ch��n)��늴��D(zhu��n)�غБ�(y��ng)늄�(d��ng)��(sh��)����ֱ��늙C(j��)�M(j��n)�������D(zhu��n)�Q�Ęм~������ͨ���ַQ��늘У����D(zhu��n)�S��늘��F�ġ�늘��@�M���Q�������L(f��ng)�ȵȽM�ɡ�ֱ��늄�(d��ng)�C(j��)�ĽY(ji��)��(g��u)����ֱ���Դ��ֱ��늙C(j��)�������_�P(gu��n)���{(di��o)�����M�ɡ�ֱ���l(f��)늙C(j��)�Ĺ���ԭ�����ǰ�늘о�Ȧ�иБ�(y��ng)�Ľ�׃늄�(d��ng)��(sh��)�����Q��������ˢ�ēQ�����ã�ʹ֮���ˢ�������r(sh��)׃?y��u)�ֱ��늄?d��ng)��(sh��)��ԭ�����Б�(y��ng)늄�(d��ng)��(sh��)�ķ������ֶ��t�_���乤��ԭ�������������ֱ���Դ�����������(q��)��(d��ng)늙C(j��)���D(zhu��n)��ͨ�^��(du��)���O�ܵĽ�ֹ�c��(d��o)ͨ�M(j��n)�п��ƣ�ʹ�����_���P(gu��n)���{(di��o)�ٵ����á����w�IJ����鮔(d��ng)ֱ��늄�(d��ng)�C(j��)����ֱ���Դ�r(sh��)��ʹ���λ�����D(zhu��n)���o�������O�ܼ��O��늉������Dֱ��늙C(j��)����ԭ������(d��ng)���O�ܵļ��O늉�С�����^(q��)늉��r(sh��)���O�ܽ�ֹ���t늄�(d��ng)�C(j��)���D(zhu��n)��(d��ng)����(d��ng)���O늉��������^(q��)늉���С���늉��r(sh��)���O��̎�ڷŴ��B(t��i)���S�����O늉���׃���Ķ���׃��ֱ��늄�(d��ng)�C(j��)�ɶ˵ĉ���Ҳ��׃��늙C(j��)���D(zhu��n)�١����wԭ��鼯�O��늉���С��һ�ӣ����O�ܵ�늉��Ŵ�(sh��)Ҳ��һ�ӏĶ����{(di��o)�����ø�׃ֱ��늄�(d��ng)�C(j��)�����D(zhu��n)�ٶȡ�
��(du��)��ֱ��늙C(j��)���f���������늘Ѓɶ˵�늉��}��(d��ng)�������Ҫ���}��(d��ng)늉��������h(yu��n)С��늙C(j��)�đT�Գ���(sh��)�������Կ�������T��׃����r�£���׃T1��T2���ȣ��õ���늉����l(f��)��׃����
�D3.2��ʩ�Ӳ�ͬռ�ձȕr(sh��)��(sh��)�y(c��)�Ĕ�(sh��)��(j��)�L������ռ�ձ��c�D(zhu��n)�ٵ��P(gu��n)ϵ�D��
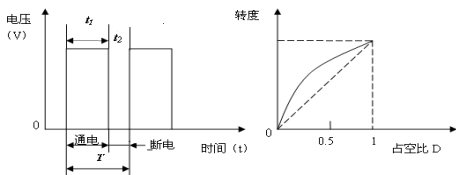
�D3.2 ռ�ձ��c늙C(j��)�D(zhu��n)�ٵ��P(gu��n)ϵ
�ɈD�����D(zhu��n)���cռ�ձ�D��������ȫ�ٵľ����P(gu��n)ϵ���D�Ќ�(sh��)������ԭ����늘б�������裬���^һ��ֱ��늙C(j��)�ă�(n��i)���^С�����Խ�ҕ�龀���P(gu��n)ϵ��
�ɴ˿�Ҋ����׃ʩ����늘Ѓɶ�늉����ܸ�׃늙C(j��)���D(zhu��n)�ٳɣ��@����ֱ��늙C(j��)PWM�{(di��o)��ԭ����
4늙C(j��)�(q��)��(d��ng)ģ�K���·�O(sh��)Ӌ(j��)���ڱ�ϵ�y(t��ng)��Ҫ�������_�P(gu��n),늙C(j��)��(l��)���·���{(di��o)���·���y(c��)���·�������V���·��ƽ��늿������Ƅ�(d��ng)�·�M��,ϵ�y(t��ng)�����]�h(hu��n)PI �{(di��o)��(ji��)�����ơ���(d��ng)�_�P(gu��n)�]�Ϻ�,����늽�(j��ng)���l���{(di��o)���·���ƺ�,�ֽ�(j��ng)�^��ʽ�������V����ƽ��늿�����,�@���}�_С���B�m(x��)��ֱ����ṩ�o늙C(j��),ͬ�r(sh��),�����ͨ�^��(l��)���·ʹ늙C(j��)�@�Ä�(l��)��,�_ʼ�������{(di��o)��(ji��)�ٶȽ�(j��ng)�^�{(di��o)��(ji��)׃�����M(j��n)��,��(d��ng)׃������ֵ׃���r(sh��),��Ƭ�C(j��)ݔ���Ŀ��ƽ�Ҳ����(y��ng)׃��,���l�܌�(d��o)ͨ���S֮׃��,�M(j��n)�������·ݔ��늉��{(di��o)��(ji��)늙C(j��)�D(zhu��n)��,ͬ�r(sh��)�y(c��)���·ݔ��늉�Ҳ����(y��ng)׃��,��(j��ng)PI �{(di��o)��(ji��)�����ú�,늙C(j��)���O(sh��)�����ٶȷ�����(n��i)��(w��n)���\(y��n)�D(zhu��n)��
�����n�O(sh��)����������X���M(j��n)��ģ�M�����@�Ӿ�������O(sh��)Ӌ(j��)��Ч���Լ��·�Ŀ����ԡ������ڷ�����^���зdz������M(j��n)���·���ֿ����_(d��)���ܺõ�Ч�������ͨ�^ʹ��Protues��(du��)Ӳ���·�����O(sh��)Ӌ(j��)����(du��)ԓ�·�M(j��n)�з����{(di��o)ԇ�����}�_��ʽ��������Ϲܜy(c��)ȡ�D(zhu��n)�٣����c��Ƭ�C(j��)�M(j��n)��ͨ���B�ӣ������D��ʾ��
4.2������Ӳ���Y(ji��)��ԭ������(g��u)�����·ԭ��D����
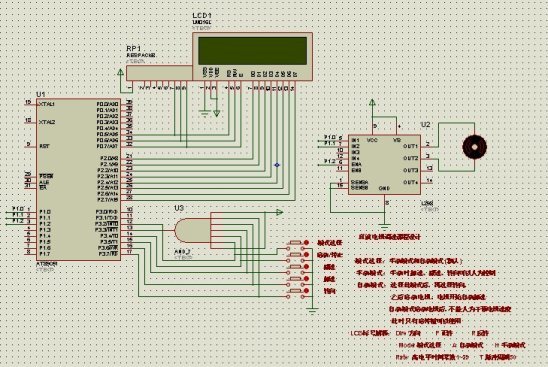
�·ԭ��D
5 ܛ�������O(sh��)Ӌ(j��)ܛ�����ֿ���1��(g��)������3��(g��)�Д��ӳ����1��(g��)P ID�㷨�ӳ���M�ɡ���������һ��(g��)ѭ�h(hu��n)����,����Ҫ˼·��,���O(sh��)�����ٶȳ�ʼֵ,�@��(g��)��ʼֵ�c�y(c��)���·�́���ֵ����^�õ�һ��(g��)�`��ֵ,Ȼ����P ID �㷨ݔ������ϵ��(sh��)�oPWM�l(f��)���·��׃���ε�ռ�ձ�,�M(j��n)������늙C(j��)���D(zhu��n)�١���������̈D��D4-1��ʾ��
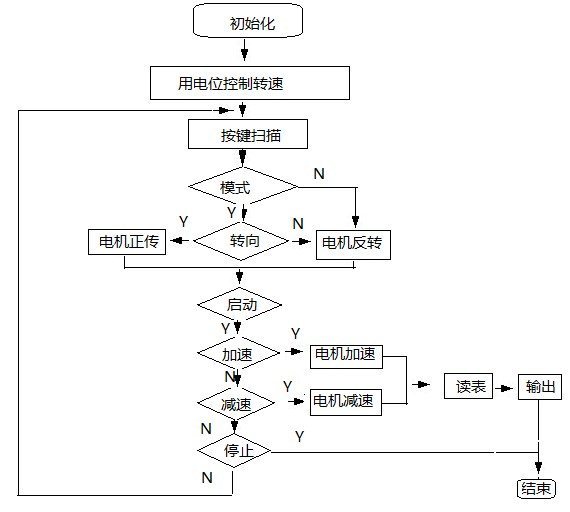
�D4.1 ܛ�����w�O(sh��)Ӌ(j��)���̈D
5.2ϵ�y(t��ng)������ܛ���O(sh��)Ӌ(j��)��˼·PWMܛ����(sh��)�F(xi��n)��ʽ��
����һ�����ö��r(sh��)�������}�����ƵĶ��r(sh��)��ʽ���@һ��ʽ�a(ch��n)�����}�_���ȘO�侫�_���`��ֻ�ڎׂ�(g��)us��
������������ܛ���ӕr(sh��)��ʽ���@һ��ʽ�ھ����ϲ�������һ���e���������Д����һ�����`����ǻ��ڲ�ռ�ö��r(sh��)���YԴ���Ҍ�(du��)��ֱ��늙C(j��)������ܛ���ӕr(sh��)���a(ch��n)���Ķ��r(sh��)�`�������S�������ʲ��÷�������
�I�P���Ƭ�C(j��)ݔ������(y��ng)����ָ��Ɇ�Ƭ�C(j��)ͨ�^P2.0�cP2.1����һ��ݔ���c�D(zhu��n)������(y��ng)��PWM�}�_����һ��ݔ�����ƽ����(j��ng)�^��̖(h��o)�Ŵ�����f���(q��)��(d��ng)H�͘�ʽ늄�(d��ng)�C(j��)�����·����(sh��)�F(xi��n)늄�(d��ng)�C(j��)�D(zhu��n)���c�D(zhu��n)�ٵĿ��ơ�늄�(d��ng)�C(j��)���\(y��n)�D(zhu��n)��B(t��i)ͨ�^LED�@ʾ������늄�(d��ng)�C(j��)��̎�ٶȼ�(j��)���ٶșn��(j��)��(sh��)�@ʾ�����D(zhu��n)�r(sh��)��(sh��)�������Ƅ�(d��ng)�����D(zhu��n)�r(sh��)��(sh��)�������Ƅ�(d��ng)���Ƅ�(d��ng)�ٶȷ�7�n�������c늄�(d��ng)�C(j��)��̎�ٶȼ�(j��)����һһ��(du��)��(y��ng)��ÿ��늄�(d��ng)�C(j��)����(d��ng)���_ʼӋ(j��)�r(sh��)��ֹͣ�r(sh��)LED�@ʾ�������\(y��n)�D(zhu��n)���Õr(sh��)�g���r(sh��)�g���_��0.1s���ڱ����n�O(sh��)���ó�������Ҫʹ�õ��ٶȜy(c��)ȡ��Ӌ(j��)�㆖�}����˞����ܸ��Ӝ�(zh��n)�_�y(c��)��ֱ��늄�(d��ng)�C(j��)�����D(zhu��n)�ٶȣ������\(y��n)�����҂����˽┵(sh��)�֜y(c��)�ٷ���Q���ٶȡ��ڴˌ�(du��)���@�N�y(c��)�ٷ����M(j��n)�б��^���@�ӾͿ��Եõ��˴��n���O(sh��)Ӌ(j��)��Ҫ�x�����ѷ�������ϵ�y(t��ng)���̲��ֹ������ÅR���Z����ɣ�����ģ�K�����O(sh��)Ӌ(j��)�������c���ӳ������錍(sh��)�F(xi��n)�����ֹ��ܺ��^�̵���ڣ�����I�Pݔ�롢���I�R(sh��)�e���ܡ�PWM�}�����ƺ�LCD�@ʾ�Ȳ��ֵ��O(sh��)Ӌ(j��)��
��PWM�}�����ƣ����O(sh��)Ӌ(j��)�в���ܛ���ӕr(sh��)��ʽ��(du��)�}�_�����M(j��n)�п��ƣ��ӕr(sh��)����(sh��)���£�
void delay(unsigned char dlylevel){
int i=50*dlylevel;
while(--i);}
�˺���(sh��)�鎧����(sh��)DLYLEVEL���s�a(ch��n)��DLYLEVEL*400us���ӕr(sh��)�����һ��(g��)�}�_���ڿ����ɸ��ƽ���m(x��)�r(sh��)�gϵ��(sh��)hlt�͵��ƽ���m(x��)�r(sh��)�gϵ��(sh��)llt�M�ɣ����O(sh��)Ӌ(j��)�в��õ��}�_�l�ʞ�25Hz���ɵ�hlt+llt=100��ռ�ձȞ�hlt/(hlt+llt)�����Ҫ��(sh��)�F(xi��n)���l�{(di��o)�����{(di��o)�ٷ�ʽ��ֻ��ͨ�^�����׃?n��i)���׃��hlt��llt��ֵ��ԓ�ӳ������̈D��D�ġ�
���Д�̎���ӳ������Дʽ�������I����Ƭ�C(j��)P3.2�_�a(ch��n)��һؓ(f��)���أ�푑�(y��ng)ԓ�Д�̎����������ӕr(sh��)ȥ����(d��ng)���I�a�R(sh��)�e�����I���܈�(zh��)�С�
�{(di��o)�ٙn�����m(x��)��/�p�٣��{(di��o)�ٙnͨ�^��0-6�����ߙn�̶�ռ�ձȣ�������(y��ng)�nλ����(y��ng)��׃hlt��llt��ֵ���Ԍ�(sh��)�F(xi��n)�{(di��o)�ٙnλ�Č�(sh��)�F(xi��n)����Ҫ��(sh��)�F(xi��n)��ס��/�p���I���ŕr(sh��)��ӻ��p��ֱ�����_ֹͣ���������Д��Ƿ����_ԓ���I�r(sh��)��ÿ�M(j��n)��һ������/�p��1%ռ�ձȣ���hlt++/--;llt--/++��,��������̈D��D�塣
���@ʾ�ӳ������Ô�(sh��)�M��ʽ���x�@ʾ����^(q��)������^(q��)��8λ���քe��Ÿ���(g��)LED��Ҫ�@ʾ��ֵ���@ʾ�ӳ���?y��n)�һ�����ӳ����?sh��)���@ʾ����Ĕ�(sh��)�M����ͨ�^for(i=0;i<8;i++)��ʽ��(du��)ÿλ����λ�x�a���͵�P0�ڲ��M(j��n)��һ�ɺ����ӕr(sh��)��
ԓ�@ʾ�ӳ���ֻ��(du��)����(g��)LED�ܷքe�c(di��n)��һ�Σ�������\(y��n)���^���У�ÿ���(zh��)�еĴΔ�(sh��)����(y��ng)����ÿ��24�Ρ�
�ܶ��r(sh��)�Д�̎�������ö��r(sh��)��ʽ1����?y��n)��Ƭ�C(j��)ʹ��12M���ɮa(ch��n)����s��65.5ms���ӕr(sh��)����(du��)���r(sh��)���ó�ֵ3CB0H�ɶ��r(sh��)50ms����ϵ�y(t��ng)�r(sh��)犾��ȿ��_(d��)0.05s����(d��ng)50ms���r(sh��)�r(sh��)�g�������r(sh��)������t푑�(y��ng)ԓ���r(sh��)�Д�̎��������Ɍ�(du��)���r(sh��)�����ٴ��xֵ������(du��)ȫ��׃��time��1���@�ӣ�ͨ�^׃��time��Ӌ(j��)���ϵ�y(t��ng)���\(y��n)�Еr(sh��)�g��
��(du��)��һ��(g��)��(sh��)���@ʾ���ȑ�(y��ng)�D(zhu��n)��BCD�a����ȡ��ÿһ��(g��)λ���քe�����@ʾ����^(q��)����(du��)���D(zhu��n)BCD���㷨����(y��ng)��(du��)һ��(g��)��(sh��)ѭ�h(hu��n)��10ȡģ��ֱ����0���������£�
do{dispbuff[bcd_p]=bechange%10; //dispbuff���@ʾ���_�^(q��)��(sh��)�M
bcd_p++;}while(bechange/=10) //disp_p�锵(sh��)�Mָ�
ܛ���O(sh��)Ӌ(j��)�е����c(di��n):
��(du��)��늙C(j��)�Ć�ͣ����PWM������ʹ�Ýu׃���}���{(di��o)�������_������ֹͣ����ٵ�Ĭ�J(r��n)�ٶȣ�ֹͣ�t���ڮ�(d��ng)ǰ�ٶ���u�����㡣�@�������ڱ��o(h��)늙C(j��)����늙C(j��)�\(y��n)����С܇�ϣ��چ���(d��ng)�ϲ��ô˷�ʽҲ�ɼӴ�(d��ng)�ٶȣ���ֹ����(du��)���\(y��n)�Еr(sh��)�g��Ӌ(j��)�㡢�@ʾ����ς��������g(sh��)������Ӌ(j��)����x���ٶȵ���Ҫ���\(y��n)�Д�(sh��)��(j��)�������Дʽ������ʹ����?q��)��I�P����(f��)���裬����˳����Ч�ʡ�
6 ϵ�y(t��ng)���{(di��o)ԇ�c�F(xi��n)�����
�D5-1�o����ԓϵ�y(t��ng)�ٶȕr(sh��)�g����(y��ng)����,���Կ���ԓϵ�y(t��ng)����(d��ng)�^��,�D(zhu��n)�ٷ�(w��n)��,�C(j��)е��(qi��ng)���^�ߡ���t0 �r(sh��)��ϵ�y(t��ng)ͻ�Ӕ_��(d��ng)����r��,�����ڶ̕r(sh��)�g��(n��i)�{(di��o)������ʼ�ٶ�,�@ʾ�����õĿ��ɔ_����,�w�F(xi��n)����PI �]�h(hu��n)�{(di��o)��(ji��)�ă�(y��u)Խ�ԡ���(j��ng)��(sh��)�`�C��,��ϵ�y(t��ng)���ԝM�㡣��ϵ�y(t��ng)���Æ�Ƭ�C(j��)���(q��)��(d��ng)оƬ�M���O(sh��)Ӌ(j��)���M(j��n)늙C(j��)�����·,��(sh��)�`����,����Ч���^�á�
ԓ����ϵ�y(t��ng)Ӳ���·�O(sh��)Ӌ(j��)��(ji��n)��,�Y(ji��)��(g��u)�o�������ĵ͡��\(y��n)�пɿ����O(sh��)Ӌ(j��)����;��ʹ�Ì����(q��)��(d��ng)оƬ,����ܛ�����^��(ji��n)�Ρ�TA8435H���}���{(di��o)��ʽ�ز��(q��)��(d��ng)��ʽ��оƬ,���������ͬ�lPWM�(q��)��(d��ng)���ă�(y��u)�c(di��n):�\(y��n)���l�ʸ�,ݔ���D(zhu��n)�ش�,��������늴����ȡ��^�õؽ�Q�˸ߵ��l�\(y��n)�Еr(sh��)��һЩ���}���������������c�����z�y(c��)�h(hu��n)��(ji��)�B��,�M���]�h(hu��n)����ϵ�y(t��ng)���ھ��Ⱥͷ�(w��n)����Ҫ���^�ߵĿ���ϵ�y(t��ng)�С��O(sh��)Ӌ(j��)������51 ��Ƭ�C(j��)��������·���{(di��o)��ϵ�y(t��ng)��,����С��ֱ��늙C(j��)�{(di��o)��ϵ�y(t��ng)�о��нY(ji��)��(g��u)��(ji��n)��,�\(y��n)�пɿ�,�{(di��o)��(ji��)������,����B�m(x��)�Ժ�,푑�(y��ng)������c(di��n),��
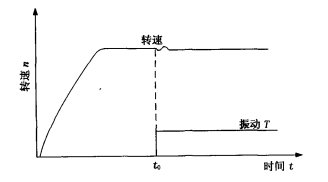
�D5-1늙C(j��)�D(zhu��n)������
һ��Ŀ���Ҫ��,����ͨ�����е��ԏV����(y��ng)�á����O(sh��)Ӌ(j��)��Ӳ���ϲ����˻���PWM���g(sh��)��H�͘�ʽ�(q��)��(d��ng)�·����Q��늙C(j��)�(q��)��(d��ng)��Ч�ʆ��}����ܛ����Ҳ�����^�������ϵ�y(t��ng)�Y(ji��)��(g��u)���㷨������ˆ�Ƭ�C(j��)��ʹ��Ч�ʣ��Ҿ���һ���ķ��w������LCDҺ�����ܱ��_(d��)��(d��ng)ǰ���D(zhu��n)���M(j��n)���@ʾ�����ұ��O(sh��)Ӌ(j��)����AT89C51��Ƭ�C(j��)���pH���(q��)��(d��ng)��(du��)ֱ��늙C(j��)�{(di��o)���M(j��n)���O(sh��)Ӌ(j��)��ͨ�^ռ�ձȵ��{(di��o)��(ji��)���(q��)��(d��ng)��늉��ĸ�׃���@ʾ���ƣ��Ķ���(sh��)�F(xi��n)늙C(j��)���D(zhu��n)�ٻ���l(f��)��׃��������LCD�ϼ��r(sh��)�@ʾ���{(di��o)ռ�ձ�(�ߵ��ƽ֮��)�Ĕ�(sh��)ֵ����(j��ng)�(y��n)�C��늙C(j��)���ԏ������_ʼ׃����ֱ��ֹͣ���ُĸ�����u׃��������D(zhu��n)���\(y��n)�з�(w��n)������(du��)��PWM�{(di��o)�ٷ�ʽ����چ�Ƭ�C(j��)����ϵ�y(t��ng)�Ќ�(sh��)�F(xi��n)�M(j��n)�������ط���,�о�ֱ��늙C(j��)�Ŀ��ƺ͜y(c��)����������߿��ƾ��Ⱥ�푑�(y��ng)�ٶȡ���(ji��)�s��Դ�ȶ�������Ҫ���x�����M(j��n)һ���о��̓�(y��u)��ֱ��늙C(j��)���Ʒ����ṩ�˻��A(ch��)���O(sh��)Ӌ(j��)���漰�Ļ��چ�Ƭ�C(j��)��늙C(j��)����ϵ�y(t��ng)�Ļ���ԭ����ϵ�y(t��ng)�Ԇ�Ƭ�C(j��)����ģ������˶�ģ�K���f(xi��)ͬ����늄�(d��ng)�C(j��)����(sh��)�F(xi��n)��(sh��)��(j��)�ɼ�����(sh��)��(j��)�惦(ch��)��늙C(j��)�\(y��n)�Р�B(t��i)���ƺ�LCD�@ʾ�ȹ��ܣ����з�(w��n)���Ĺ������ԡ�PID���ƵIJ���ʹ늄�(d��ng)�C(j��)����(w��n)�����\(y��n)�������D(zhu��n)���ٺ͜p�ٵ��\(y��n)��(d��ng)��B(t��i)���������늄�(d��ng)�C(j��)���(d��ng)��Դ�ęC(j��)е�b�õĹ���Ч�ʡ�
AT89C51��Ƭ�C(j��)����(qi��ng)������Ĺ��ܔU(ku��)չ��ͨ�^���N������ӑՓ���Lԇ���ٽ�(j��ng)�^��ε����wܛӲ���Y(ji��)���{(di��o)ԇ������،�(du��)ϵ�y(t��ng)�M(j��n)�Ѓ�(y��u)����ͬ�r(sh��)��(du��)늄�(d��ng)�C(j��)���Ʋ���һ��(g��)��(ji��n)�ε���ӿ��Ɔ��}�����漰�ܶ���֪�R(sh��)�����ņ�Ƭ�C(j��)�ڽ����Ԅ�(d��ng)�����I(l��ng)���Ќ��и��V韵đ�(y��ng)��ǰ��������ԓϵ�y(t��ng)�ܳɹ��\(y��n)����ֱ��늙C(j��)�D(zhu��n)��ϵ�y(t��ng)�Č�(sh��)�r(sh��)�O(ji��n)�أ���(ji��n)������߉ϵ�y(t��ng)�����ҳɱ��������������������ɔ_���ܺá��ܳɹ���(y��ng)����ֱ��늙C(j��)�D(zhu��n)���{(di��o)��(ji��)���O(ji��n)�ء����o(h��)��(ch��ng)�ϣ����ұO(ji��n)�ؽ����Ѻã�ʹ�÷��㡣�܉�?q��)�ֱ��늙C(j��)��(sh��)�Ќ�(sh��)�r(sh��)�O(ji��n)�أ����H�������˸����\(y��n)�Еr(sh��)�ķ�(w��n)���ԣ�����߀��(sh��)�F(xi��n)�˱��o(h��)���ܡ�
ͨ�^��(sh��)�(y��n)���Y(ji��)��Ҫ�Լ�ȥ������(sh��)�`�������P(gu��n)֪�R(sh��)���@��֪�R(sh��)�������յ��ι̣����������ČW(xu��)���ˡ��_ʼ���X�@��(g��)�n�O(sh��)���y��ԭ�������Լ���(d��ng)�����]���м�(x��)��������(g��)Ԫ�����Ĺ���ԭ���������λ���������O�ܵ����á����_ʼֻ�뵽�����_�P(gu��n)���ã�����ٻ�ȥ���˲��Y�ϲŰl(f��)�F(xi��n)�Լ���������߀�зŴ�����ã�ͨ�^��׃���O��늉��Ϳ��Ը�׃��늘O�c�l(f��)��O늉��ķŴ�(sh��)�M(j��n)����׃ֱ��늄�(d��ng)�C(j��)�����D(zhu��n)�ٶȡ����Լ���Q���}�����P(gu��n)�I�ġ���(j��ng)�v�����n���O(sh��)Ӌ(j��)֮�����кܶ���ի@��
�������кõ���Փ�������ܸ�Ч�����ڌ�(sh��)�`�ϣ�ֻ��ͨ�^�Լ������Ⲣ���T��(sh��)�`�������գ� �������ܕr(sh��)Ҫ̓�ČW(xu��)��(x��)����Ҫ���Լ�ȥŬ����Q����?y��n)��Ժ���ܛ]�����ڌW(xu��)У�ώ�������ֻ�Ъ�(d��)����ɡ����Ҵ𰸿��ܲ�ֻ��һ�N�����˽�Q�ķ����r(sh��)Ҫ���]߀�Л]��������������(ji��n)�㣬��õ��õĽY(ji��)������Ҫ����(f��)���ú͌�(sh��)�`�����Q���}�ͱ��Ҫ�܌��У��Կ࣬�����ġ��ڊ^���c�ˈF(tu��n)�Y(ji��)�����ȾC�����|(zh��)��
늙C(j��)���D(zhu��n)
늙C(j��)���D(zhu��n)
늙C(j��)����
 ���چ�Ƭ�C(j��)��ֱ��늙C(j��)����ϵ�y(t��ng)�O(sh��)Ӌ(j��).doc
(1.12 MB, ���d��(sh��): 107)
���چ�Ƭ�C(j��)��ֱ��늙C(j��)����ϵ�y(t��ng)�O(sh��)Ӌ(j��).doc
(1.12 MB, ���d��(sh��): 107)
 �y(c��)��ģ�K�Y��.rar
(76.43 KB, ���d��(sh��): 87)
�y(c��)��ģ�K�Y��.rar
(76.43 KB, ���d��(sh��): 87)
| �gӭ���R (http://www.raoushi.com/bbs/) | Powered by Discuz! X3.1 |