標(biāo)題: STC單片機(jī)+MPU6050風(fēng)力擺控制系統(tǒng)設(shè)計(jì)報(bào)告 [打印本頁(yè)]
作者: dzh9912220 時(shí)間: 2018-5-31 20:13
標(biāo)題: STC單片機(jī)+MPU6050風(fēng)力擺控制系統(tǒng)設(shè)計(jì)報(bào)告
2015年全國(guó)大學(xué)生電子設(shè)計(jì)競(jìng)賽
風(fēng)力擺控制系統(tǒng)(B題)
摘要
本系統(tǒng)采用STC12C5A60S2為主控芯片,通過(guò)MPU6050傳感器提供反饋信息、采用PID控制算法調(diào)整軸流風(fēng)機(jī)的工作狀態(tài)、在液晶和按鍵的作用下顯示并切換工作模式,形成一閉環(huán)測(cè)控系統(tǒng)。該測(cè)控系統(tǒng)通過(guò)控制驅(qū)動(dòng)各風(fēng)機(jī),使風(fēng)力擺按照一定規(guī)律運(yùn)動(dòng),同時(shí)保證擺桿下方懸掛的激光筆能在地面畫(huà)出要求的軌跡。
目錄
摘要1
一、設(shè)計(jì)任務(wù)1
二、方案論證1
2.1 控制器模塊方案2
2.2位置檢測(cè)模塊2
2.3動(dòng)力裝置方案設(shè)計(jì)2
2.4 外圍模塊方案設(shè)計(jì)2
2.4.1 功能調(diào)用模塊的設(shè)計(jì)2
2.4.2 顯示模塊的設(shè)計(jì)3
2.4.3 聲光提示模塊3
2.4.4 電源模塊3
2.5硬件電路設(shè)計(jì)3
2.6 系統(tǒng)控制方案的整體設(shè)計(jì)3
2.6.1 風(fēng)力擺擺直線過(guò)程分析4
2.6.2 風(fēng)力擺擺圓過(guò)程分析4
三、理論分析與計(jì)算5
3.1運(yùn)動(dòng)控制6
3.1.1直線運(yùn)動(dòng)的控制6
3.1.2 擺圓運(yùn)動(dòng)的控制6
3.2 軟件實(shí)現(xiàn)6
3.2.1 所用算法6
3.2.2 程序部分6
四、測(cè)試結(jié)果與誤差分析7
4.1風(fēng)機(jī)性能的測(cè)試7
4.2擺直線任務(wù)的測(cè)試7
4.3速停任務(wù)測(cè)試記錄7
4.4圓周軌跡任務(wù)測(cè)試7
4.5誤差分析7
五、結(jié)論心得體會(huì)8
5.1結(jié)論8
5.2心得體會(huì)8
參考文獻(xiàn)9
附錄1:電路原理圖10
附錄2:部分PCB設(shè)計(jì)圖11
附錄3:部分關(guān)鍵程序12
附錄4:系統(tǒng)整體照片13
風(fēng)力擺控制系統(tǒng)
摘要:本系統(tǒng)采用STC12C5A60S2為主控芯片,通過(guò)MPU6050傳感器提供反饋信息、采用PID控制算法調(diào)整軸流風(fēng)機(jī)的狀態(tài)、在液晶和按鍵的人機(jī)交互作用下顯示并切換工作模式,形成一閉環(huán)測(cè)控系統(tǒng)。該測(cè)控系統(tǒng)通過(guò)控制驅(qū)動(dòng)各風(fēng)機(jī),使風(fēng)力擺按照一定規(guī)律運(yùn)動(dòng),同時(shí)保證擺桿下方懸掛的激光筆能在地面畫(huà)出要求的軌跡。
關(guān)鍵詞:風(fēng)力擺 STC12單片機(jī) 軸流風(fēng)機(jī)
一、設(shè)計(jì)任務(wù)
一長(zhǎng)約 60cm~70cm 的細(xì)管上端用萬(wàn)向節(jié)固定在支架上,下方懸掛一組(2~4 只)直流風(fēng)機(jī),構(gòu)成一風(fēng)力擺。風(fēng)力擺上安裝一向下的激光筆,靜止時(shí),激光筆的下端距地面不超過(guò) 20cm。設(shè)計(jì)一測(cè)控系統(tǒng),控制驅(qū)動(dòng)各風(fēng)機(jī)使風(fēng)力擺按照一定規(guī)律運(yùn)動(dòng),激光筆在地面畫(huà)出要求的軌跡。具體要求可參看設(shè)計(jì)任務(wù)書(shū)。
二、方案論證
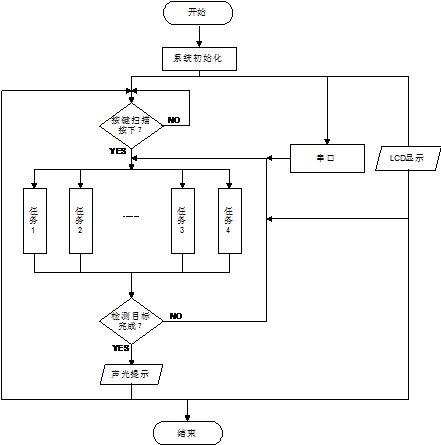
根據(jù)題目要求,此測(cè)控系統(tǒng)完成控制風(fēng)力擺按照一定規(guī)律運(yùn)動(dòng)、使激光筆在地面上畫(huà)出規(guī)定軌跡的任務(wù)。其通過(guò)按鍵與LCD三級(jí)子菜單,在不同工作模式間切換,完成相應(yīng)的控制任務(wù),關(guān)鍵在于反饋信息的準(zhǔn)確和對(duì)軸流風(fēng)機(jī)的控制。為此我們將系統(tǒng)分為五個(gè)模塊,并對(duì)各個(gè)模塊的方案進(jìn)行了評(píng)估選擇。系統(tǒng)整體方案框圖如圖 1 所示:

0.png (7.33 KB, 下載次數(shù): 31)
下載附件
2018-6-1 03:56 上傳
圖1 系統(tǒng)整體框圖
2.1控制器模塊方案
控制器是整個(gè)控制系統(tǒng)的核心,承載著執(zhí)行控制算法,實(shí)現(xiàn)控制功能的作用。因此,要保證系統(tǒng)整體的控制質(zhì)量,控制器的選擇非常重要!在控制器的選擇方案中,主要進(jìn)行了如下對(duì)比:
方案一:選擇常見(jiàn)且應(yīng)用廣泛的AT89C52作為控制芯片。對(duì)于這種單片機(jī),我們有良好的知識(shí)基礎(chǔ),上手快,成本低。然而對(duì)于本控制系統(tǒng),程序量較大、所需I/O口較多,89單片機(jī)將很難滿足控制要求,難以勝任控制任務(wù)。因此,89單片機(jī)并不適合作為本系統(tǒng)的控制器。
方案二:較之89系列單片機(jī),STC12單片機(jī)資源豐富,集成EEPROM、AD、 PCA可編程計(jì)數(shù)陣列等;其功能更強(qiáng)大,執(zhí)行速度更快。對(duì)于本系統(tǒng)來(lái)說(shuō),足以完成控制任務(wù)。故而作為本控制系統(tǒng)的首選。
2.2位置檢測(cè)模塊
檢測(cè)模塊不僅是獲得被控系統(tǒng)所需信息的唯一渠道,而且從根本上決定了被控系統(tǒng)的控制精度,相當(dāng)于控制系統(tǒng)中的“眼睛”;因此檢測(cè)模塊的設(shè)計(jì)對(duì)整個(gè)控制系統(tǒng)的設(shè)計(jì)至關(guān)重要!基于此,在選擇檢測(cè)元件時(shí),主要做了如下對(duì)比:
方案一:選擇整合性6軸運(yùn)動(dòng)處理組件MPU6050,利用其自身集成的3軸MEMS陀螺儀,3軸 MEMS加速度計(jì)精確地對(duì)被控對(duì)象的運(yùn)動(dòng)狀態(tài)進(jìn)行數(shù)據(jù)采集;在數(shù)據(jù)處理上采用卡爾曼濾波算法,測(cè)量精度極高。另外,該傳感器封裝小節(jié)省空間,對(duì)本系統(tǒng)的控制十分有利。
方案二:選擇角度、加速度模塊 MMA7361傳感器。這一模塊雖有壓降小,適合高噪聲電源環(huán)境工作等特點(diǎn),但其測(cè)量精度及測(cè)量范圍等各方面性能不及MPU6050。綜合考慮,選取MMA7361作為檢測(cè)變送傳感器并不明智。
經(jīng)過(guò)上述對(duì)比,最終本系統(tǒng)選用了MPU6050作為位置檢測(cè)的傳感器。
2.3動(dòng)力裝置方案設(shè)計(jì)
動(dòng)力裝置作為本控制系統(tǒng)中的執(zhí)行機(jī)構(gòu),是控制系統(tǒng)中的重要組成部分。它將控制器送來(lái)的控制信號(hào)轉(zhuǎn)換成執(zhí)行動(dòng)作,從而操縱作用于被控對(duì)象的能量,將被控變量維持在所要求的數(shù)值上或一定的范圍內(nèi)。軸流風(fēng)機(jī)作為此系統(tǒng)的唯一動(dòng)力裝置,其提供的動(dòng)力是否充足、可調(diào)性是否優(yōu)良將直接決定能否完成控制任務(wù)和控制質(zhì)量的高低。為此考慮了成本、體積等因素,主要擬定了以下兩個(gè)方案。
方案一:選擇某牌直流12V-2.3A軸流小型風(fēng)機(jī)。該風(fēng)機(jī)體積小、質(zhì)量輕,對(duì)擺桿的運(yùn)動(dòng)十分有利。另外,該種風(fēng)機(jī)功率大、動(dòng)力充足,能為控制系統(tǒng)提供充足的能量。
方案二:選擇與上述風(fēng)機(jī)同品牌的12V-1.8A軸流風(fēng)機(jī)。與上述風(fēng)機(jī)相比,該風(fēng)機(jī)質(zhì)量較大,功率卻不及小型風(fēng)機(jī)。其他方面,此二種風(fēng)機(jī)并無(wú)差異。
上述方案的論證,似乎證明方案一將是本系統(tǒng)的不二之選,然而事實(shí)并非如此。在經(jīng)過(guò)充分的實(shí)驗(yàn)發(fā)現(xiàn)(詳見(jiàn)4.1中風(fēng)機(jī)性能測(cè)試),方案一中風(fēng)機(jī)啟動(dòng)過(guò)慢、控制不及時(shí),而且其提供風(fēng)力并不比方案二中軸流風(fēng)機(jī)大。因此,本系統(tǒng)最終確定以方案二作為動(dòng)力裝置。
2.4外圍模塊方案設(shè)計(jì)
本系統(tǒng)中的外圍模塊,主要是指與對(duì)風(fēng)機(jī)的控制不起直接作用的功能調(diào)用模塊、顯示模塊、聲光提示模塊、電源模塊。
主要是指鍵盤(按鍵)模塊和顯示模塊。由于該系統(tǒng)所涉及的控制任務(wù)較多,使用鍵盤按鍵進(jìn)行不同那個(gè)任務(wù)間的相互切換,降低了對(duì)程序的邏輯要求,易于編程、方便實(shí)施。而顯示模塊將檢測(cè)到的信息直觀的顯示出來(lái),利于對(duì)整個(gè)控制過(guò)程進(jìn)行實(shí)時(shí)監(jiān)控。這種良好的人機(jī)交互環(huán)境,也非常符合當(dāng)前控制過(guò)程智能友好的趨勢(shì)。
2.4.1 功能調(diào)用模塊的設(shè)計(jì)
功能調(diào)用模塊主要完成切換系統(tǒng)工作模式的任務(wù)。這里工作模式的切換主要通過(guò)按鍵,常見(jiàn)的按鍵單元有:矩陣鍵盤、簡(jiǎn)單鍵盤等。以下為兩種方案的對(duì)比:
方案一:矩陣鍵盤占用單片機(jī)的端口少、節(jié)約硬件資源;但電路設(shè)計(jì)較復(fù)雜、開(kāi)發(fā)時(shí)間較長(zhǎng)、軟件設(shè)計(jì)也相對(duì)復(fù)雜。主要針對(duì)多鍵盤設(shè)計(jì),適用于控制要求高、控制功能多的系統(tǒng)。
方案二:簡(jiǎn)單鍵盤設(shè)計(jì)簡(jiǎn)單、易于實(shí)現(xiàn)、減少了系統(tǒng)的復(fù)雜度;尤其適合執(zhí)行功能不多的系統(tǒng)。
在上面的對(duì)比中不難看出,利用簡(jiǎn)單鍵盤進(jìn)行功能調(diào)用將更加方便;對(duì)本系統(tǒng)的設(shè)計(jì)更有優(yōu)勢(shì)。因此選用方案二。
2.4.2 顯示模塊的設(shè)計(jì)
作為人機(jī)交互的途徑,顯示模塊旨在占用最小的資源提供最多的可利用信息。常見(jiàn)的顯示模塊有1602液晶和12864液晶,本文對(duì)上述兩種液晶做了如下對(duì)比:
方案一:采用1602液晶。1602液晶體積小、引腳少,節(jié)省硬件資源;但其顯示信息量與其他液晶相比較小。
方案二:采用12864液晶。該種液晶微功耗、顯示信息量大、字跡清晰、美觀、視覺(jué)舒適;適合進(jìn)行菜單顯示,使整個(gè)控制系統(tǒng)更加人性化。另外,其可在串行口模式下工作,工作時(shí)僅需引出兩根數(shù)據(jù)線和兩根電源線,更加節(jié)省I/O口。
考慮到以上信息、并結(jié)合了本系統(tǒng)的特點(diǎn),最終本系統(tǒng)以12684液晶作為顯示單元。
2.4.3 聲光提示模塊
此模塊的設(shè)計(jì)主要考慮了設(shè)計(jì)任務(wù)的要求,即各項(xiàng)目中,運(yùn)動(dòng)達(dá)到要求時(shí)需有明顯的聲或光提示,以便開(kāi)始測(cè)試及記錄。本系統(tǒng)的提示裝置為發(fā)光二極管和蜂鳴器,他們?cè)谙到y(tǒng)中起到了提示作用,這里不再贅述。
2.4.4 電源模塊
在該控制系統(tǒng)中,要完成控制任務(wù)必須保證風(fēng)機(jī)提供充足的動(dòng)力。這就要求電源能提供風(fēng)機(jī)工作所需的電流。在選擇電源時(shí),主要從如下兩個(gè)方案中進(jìn)行實(shí)驗(yàn)對(duì)比:
方案一:采用類似于驅(qū)動(dòng)直流電機(jī)的方法,通過(guò)L298N驅(qū)動(dòng)四個(gè)風(fēng)機(jī)。此方案在電機(jī)的控制中較為常見(jiàn),軸流風(fēng)機(jī)作為一種直流電機(jī),應(yīng)該也能正常工作。
方案二:使用兩個(gè)12V-3A的電源直接供電,每個(gè)電源分別為其中的兩個(gè)風(fēng)機(jī)供電。這樣要控制風(fēng)機(jī),必須選擇帶有PWM控制線的風(fēng)機(jī)。
通過(guò)實(shí)驗(yàn)證實(shí):方案一如果沒(méi)有采用必要的軟件控制和硬件補(bǔ)償,很難提供充足的動(dòng)力使擺桿擺起足夠的角度。而方案二只要選擇帶有控制線的風(fēng)機(jī),便避免了方案一中的弊端。 故此系統(tǒng)電源選擇方案二。
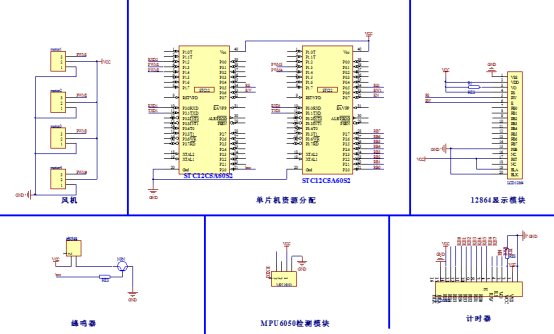
2.5硬件電路設(shè)計(jì)
在硬件方面,本系統(tǒng)采用了STC12C5A60S2最小系統(tǒng)板、12864液晶以及其他外圍模塊。相應(yīng)的電路圖和PCB板可參看附錄1。
2.6 系統(tǒng)控制方案的整體設(shè)計(jì)
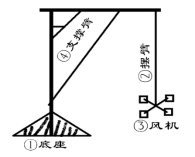
選擇好各模塊合適的方案后,系統(tǒng)整體控制方案的設(shè)計(jì)就相當(dāng)重要了。首先是系統(tǒng)結(jié)構(gòu)設(shè)計(jì),如圖2所示是系統(tǒng)的機(jī)械結(jié)構(gòu)。
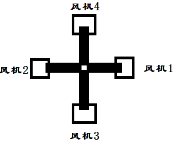
圖2 系統(tǒng)結(jié)構(gòu)模型 圖3 風(fēng)機(jī)擺放位置
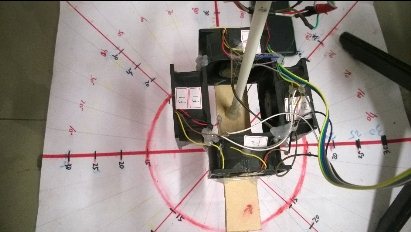
值得注意的是③風(fēng)機(jī)的擺放位置,為便于設(shè)計(jì)分析,風(fēng)機(jī)應(yīng)擺放為十字型如圖3所示。
控制系統(tǒng)各部分的關(guān)系如圖4控制方框圖所示。
圖4 控制系統(tǒng)控制方框圖
明確了控制流程和系統(tǒng)結(jié)構(gòu),系統(tǒng)控制任務(wù)的完成就完全依賴于對(duì)擺運(yùn)動(dòng)過(guò)程的理解。這里首先對(duì)系統(tǒng)結(jié)構(gòu)進(jìn)行說(shuō)明,然后將系統(tǒng)的運(yùn)動(dòng)過(guò)程分為擺直線和擺圓周兩個(gè)部分,進(jìn)行簡(jiǎn)要分析。
2.6.1 風(fēng)力擺擺直線過(guò)程分析
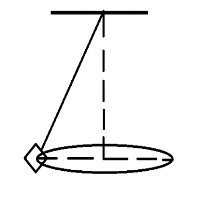

 其簡(jiǎn)化的模型如圖5所示。很顯然,在該模型中擺桿的位置到圓心A的距離與角度α成單值函數(shù)關(guān)系。在執(zhí)行風(fēng)力擺擺直線的工作模式時(shí),只要根據(jù)反饋的角度α,在確定了擺桿的長(zhǎng)度的前提下,即可由式1得到擺桿所能擺直線的長(zhǎng)度D:
其簡(jiǎn)化的模型如圖5所示。很顯然,在該模型中擺桿的位置到圓心A的距離與角度α成單值函數(shù)關(guān)系。在執(zhí)行風(fēng)力擺擺直線的工作模式時(shí),只要根據(jù)反饋的角度α,在確定了擺桿的長(zhǎng)度的前提下,即可由式1得到擺桿所能擺直線的長(zhǎng)度D:由于 ,而事實(shí)上,擺桿擺起的高度可以近似忽略,則
,而事實(shí)上,擺桿擺起的高度可以近似忽略,則 D=l*tanα, (公式1)
即:α=arctan(D/l) (公式2)
其中l(wèi)為擺桿長(zhǎng)度。在具體工作時(shí),可將控制器的輸出信號(hào)作用于風(fēng)機(jī),以此來(lái)改變其擺動(dòng)的幅度。此為風(fēng)力擺擺直線的簡(jiǎn)單分析。
圖5 風(fēng)力擺簡(jiǎn)化模型
2.6.2風(fēng)力擺擺圓過(guò)程分析
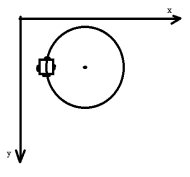
力擺擺圓過(guò)程其實(shí)可以分解為兩個(gè)方向(x軸、y軸)的運(yùn)動(dòng),如圖6所示。
在該過(guò)程中,四個(gè)軸流風(fēng)機(jī)控制了擺桿沿如圖所示的x、y方向的運(yùn)動(dòng)。只要使在x方向的運(yùn)動(dòng)與y向的運(yùn)動(dòng)頻率相同、幅度相等,相位相差90°,即可完成畫(huà)圓任務(wù)。因此利用反饋的位置信息,可控制四個(gè)風(fēng)機(jī)的工作狀態(tài);進(jìn)而改變擺桿所處位置,完成控制任務(wù)。
圖6風(fēng)力擺擺圓簡(jiǎn)易模型
三、理論分析與計(jì)算
3.1運(yùn)動(dòng)控制
在2.5部分,對(duì)擺的運(yùn)動(dòng)狀況已經(jīng)有了一個(gè)基本的了解。下文的敘述將在上述運(yùn)動(dòng)狀態(tài)的基礎(chǔ)上,以設(shè)計(jì)任務(wù)為最終目的,結(jié)合采用的控制算法進(jìn)行分析論證。
3.1.1直線運(yùn)動(dòng)的控制
設(shè)計(jì)任務(wù)中,要求本系統(tǒng)做類似自由擺運(yùn)動(dòng),使激光筆穩(wěn)定地在地面畫(huà)出一條長(zhǎng)度不短于 50cm 的直線段,其線性度偏差不大于±2.5cm,并且具有較好的重復(fù)性。這顯然是一個(gè)開(kāi)環(huán)控制,通過(guò)粗略調(diào)節(jié)便可實(shí)現(xiàn)設(shè)計(jì)任務(wù)。在2.5.1中的運(yùn)動(dòng)分析部分已經(jīng)明確,要求激光筆繪制的距離需要控制的其實(shí)是擺桿的角度,而擺桿的角度是通過(guò)控制軸流風(fēng)機(jī)的轉(zhuǎn)速產(chǎn)生空氣推力來(lái)間接控制的。為了使激光筆繪制的軌跡達(dá)到設(shè)定值,我們就需要控制擺桿的傾角,這個(gè)個(gè)傾角可以直接計(jì)算出來(lái);然后,通過(guò)簡(jiǎn)單的開(kāi)環(huán)調(diào)節(jié),給風(fēng)機(jī)以相應(yīng)的PWM波,風(fēng)機(jī)帶動(dòng)擺桿擺動(dòng),便可輕易實(shí)現(xiàn)直線任務(wù)。
 3.1.2 擺圓運(yùn)動(dòng)的控制
3.1.2 擺圓運(yùn)動(dòng)的控制在2.5.2的基礎(chǔ)上,可做如下分析。如圖7運(yùn)動(dòng)分解,并結(jié)合公式1和公式2不難得出如下公式:
 , (公式3)
, (公式3)其中,θ是自行設(shè)置的,知道軸向風(fēng)機(jī)應(yīng)產(chǎn)生空氣推力的比例之后,MCU 將控制電機(jī)的 PWM 置為相應(yīng)比例,反復(fù)調(diào)節(jié)幾次便可以使擺動(dòng)角度達(dá)到要求。
圖7 運(yùn)動(dòng)分解圖示
3.2 軟件實(shí)現(xiàn)
在有了一定的理論基礎(chǔ),并構(gòu)建了相應(yīng)的硬件電路之后,控制任務(wù)將完全依賴于程序?qū)崿F(xiàn)。而此系統(tǒng)的關(guān)鍵在于,根據(jù)反饋角度對(duì)軸流風(fēng)機(jī)進(jìn)行較精確的控制。這一精確控制體現(xiàn)在PWM的控制中,因此控制算法的選擇尤為重要。
3.2.1所用算法
本系統(tǒng)采用增量式PID控制公式:(如下所示)
△u(k)=Kp[e(k)-e(k-1)]+Kie(k)+Kd[e(k)-2e(k-1)+e(k-2)], (公式4)
其中,△u(k)系統(tǒng)應(yīng)增加的輸出
Kp為比例系數(shù)
Ki積分時(shí)間
Kd微分時(shí)間
e(k)第K次采樣的誤差
e(k-1) 第k-1次采樣的誤差
e(k-2) 第k-2次采樣的誤差
于本控制系統(tǒng)而言,誤差即給定值與反饋的到的姿態(tài)角之間的差值。經(jīng)過(guò)計(jì)算得到u(k)作為控制器的輸出,調(diào)節(jié)風(fēng)機(jī)轉(zhuǎn)速,這一改變直接作用于被控對(duì)象,最終達(dá)到控制效果。這一過(guò)程中控制質(zhì)量的優(yōu)劣,關(guān)鍵在于PID控制算式中比例系數(shù)Kp、積分時(shí)間Ki和微分時(shí)間Kd的整定。本系統(tǒng)整定主要采用了經(jīng)驗(yàn)試湊法,這里不再贅述。
3.2.2 程序部分
A.主程序流程圖如圖8所示:
圖8 程序流程圖
B.關(guān)鍵算法的程序?qū)崿F(xiàn)
在任務(wù)一和二中,采用了開(kāi)環(huán)控制,這里不再給出其實(shí)現(xiàn)程序。在其他基礎(chǔ)任務(wù)和發(fā)揮部分,用到了PID控制方法,其實(shí)現(xiàn)代碼見(jiàn)附錄三。
四、測(cè)試結(jié)果與誤差分析
4.1風(fēng)機(jī)性能的測(cè)試
將占空比恒定的PWM波分別加到兩組風(fēng)機(jī)上,在其他狀況完全相同的情況下,記錄啟動(dòng)N秒后擺桿所能擺動(dòng)的幅度,以此來(lái)進(jìn)行其性能比較。如下表1所示:
風(fēng)機(jī)類型
風(fēng)機(jī)數(shù) | 小風(fēng)機(jī)啟動(dòng)N秒后的擺動(dòng)幅度(單位:厘米) | 大風(fēng)機(jī)啟動(dòng)N秒后的擺動(dòng)幅度(單位:厘米) |
| | | | | | | | | |
| | | | | | | | | | |
| | | | | | | | | | |
表1風(fēng)機(jī)性能的測(cè)試
對(duì)比上述測(cè)試數(shù)據(jù),不難發(fā)現(xiàn)小風(fēng)機(jī)雖然功率大,但實(shí)際的吹風(fēng)效果并不及大風(fēng)機(jī),且風(fēng)機(jī)數(shù)量越多越利于擺出較大幅度。
4.2擺直線任務(wù)的測(cè)試
在任務(wù)一和任務(wù)二中,都是完成擺直線的任務(wù)。所以這里僅給出部分測(cè)試數(shù)據(jù),下表2所示的記錄,是設(shè)定擺擺動(dòng)幅度為55cm時(shí)的數(shù)據(jù)。表中的偏離程度是指,所擺軌跡偏離給定直線的距離。
表2擺直線任務(wù)測(cè)試記錄
4.3速停任務(wù)測(cè)試記錄:
將擺桿拉起不同的角度,記錄其停止時(shí)間。多次進(jìn)行試驗(yàn)后,數(shù)據(jù)記錄如下:
表3速停任務(wù)記錄
4.4圓周軌跡任務(wù)測(cè)試
該部分?jǐn)?shù)據(jù)為設(shè)定擺圓半徑,記錄其軌跡穩(wěn)定完成規(guī)定任務(wù)時(shí)所用時(shí)間:
表4圓周軌跡任務(wù)測(cè)試
4.5誤差分析
由表中數(shù)據(jù)可知,在每一項(xiàng)數(shù)據(jù)中都在時(shí)間和擺動(dòng)軌跡上存在誤差。分析其產(chǎn)生原因,主要有四:一是參數(shù)整定不足夠優(yōu)良,這是最根本的;二是機(jī)械結(jié)構(gòu)不夠穩(wěn)固,在擺桿運(yùn)動(dòng)過(guò)程中其引起系統(tǒng)震動(dòng),這一干擾在系統(tǒng)中很難消除;三是控制器通信存在時(shí)間滯后,難以消除;還有第四點(diǎn)就是測(cè)量是可能存在誤差。不過(guò),這些誤差都是在所允許的范圍內(nèi),故而可以認(rèn)定系統(tǒng)是滿足設(shè)計(jì)要求的。
五、結(jié)論心得體會(huì)
5.1結(jié)論
經(jīng)過(guò)足夠多次的測(cè)試,在允許的誤差范圍內(nèi),本系統(tǒng)基本完成了設(shè)計(jì)任務(wù)。測(cè)試中,該系統(tǒng)充分展示了其較高穩(wěn)定性和較強(qiáng)的魯棒性。附錄中給出了相關(guān)的程序和電路圖等,以供說(shuō)明使用。
5.2心得體會(huì)
眼看結(jié)項(xiàng)之日臨近,心中難免感慨萬(wàn)千。從確定題目、到制定方案、到程序調(diào)試……我們經(jīng)歷了漫長(zhǎng)而又最最充實(shí)的四天三夜!
熱愛(ài)播下“控制之種”
源于對(duì)控制學(xué)科的熱愛(ài),試題未出,本團(tuán)隊(duì)成員便達(dá)成一致意見(jiàn):無(wú)論控制類題目的難易,一定做控制題。
工作一展開(kāi),我們團(tuán)隊(duì)便按事先的準(zhǔn)備明確分工、通力配合。這種和諧特別體現(xiàn)在搭建系統(tǒng)機(jī)械架構(gòu)和最后的程序調(diào)試過(guò)程中。整個(gè)工作過(guò)程中,我們相互鼓勵(lì),最終完成了既定任務(wù)。
汗水澆灌“成功之花”
在作品最終定型那一刻,我們所有的疲憊都化為烏有,我們所有的汗水都化作成功的喜悅。此時(shí),最終的結(jié)果都已不再重要,我們有所付出、有所收獲、有所感動(dòng),這便是我們最大的成功。
從項(xiàng)目開(kāi)始到最終完成,我們遇到的困難從硬件資源不足,到算法實(shí)現(xiàn)困難,又到程序調(diào)試?yán)щy重重;然而,我們沒(méi)有被嚇倒,因?yàn)槲覀儓?jiān)信:一切困難都是紙老虎!達(dá)不到期望的性能,我們可以不吃飯、不睡覺(jué);我們不認(rèn)為苦,因?yàn)槲覀儤?lè)在其中!最終我們做到了讓自己滿意,We did it!
稍有遺憾,收獲頗豐
當(dāng)然,這個(gè)過(guò)程中我們還是留有一些遺憾。因?yàn)橄到y(tǒng)仍有不足,未能完善到我們理想的狀態(tài)。主要有三:一是對(duì)機(jī)械部分的構(gòu)建,現(xiàn)有設(shè)備畢竟有限,主要利用了木材作為支撐設(shè)備,其柔性對(duì)系統(tǒng)的干擾,我們很難克服;二是對(duì)算法和程序的優(yōu)化不足,造成程序略顯冗余,給日后本團(tuán)隊(duì)完善作品、添加功能造成不便;三是原本計(jì)劃的發(fā)揮功能未能成功添加到系統(tǒng)中,如實(shí)現(xiàn)檢測(cè)信號(hào)顯示到手機(jī)上,進(jìn)行實(shí)時(shí)監(jiān)控的功能等。
談到收獲,那應(yīng)該就是這次賽事所給我們帶來(lái)的項(xiàng)目經(jīng)驗(yàn)了。我們層層障礙,最終完成作品;成功將理論聯(lián)系實(shí)際。我們很享受這個(gè)過(guò)程,這四天三夜的充實(shí)工作,必將是我們團(tuán)隊(duì)終生銘記!
致謝
最后我們要感謝主辦方、學(xué)校和指導(dǎo)老師,感謝你們?yōu)槲覀儎?chuàng)造的這一平臺(tái),讓我們有機(jī)會(huì)將自己的理論與實(shí)踐結(jié)合,讓我們的動(dòng)手能力提高到新的臺(tái)階!
參考文獻(xiàn):
1.《單片機(jī)實(shí)用系統(tǒng)設(shè)計(jì)與仿真經(jīng)典實(shí)例》,電子工業(yè)出版社,周潤(rùn)景 劉曉霞著
2.《全國(guó)大學(xué)生電子設(shè)計(jì)競(jìng)賽培訓(xùn)系列教程<數(shù)字系統(tǒng)與自動(dòng)控制系統(tǒng)設(shè)計(jì)>》,電子工業(yè)出版社,高吉祥主編
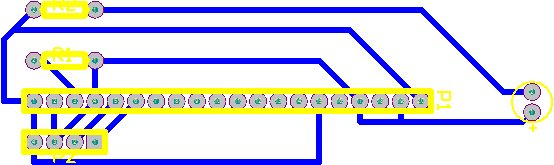
附錄1:電路原理圖
1.1單片機(jī)資源分配圖
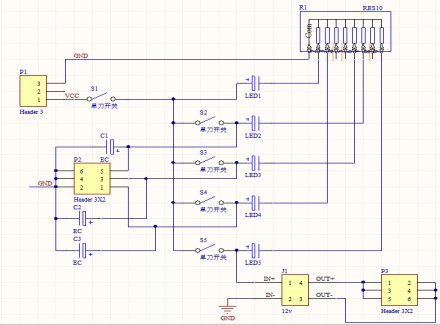
1.2電源轉(zhuǎn)接板原理圖
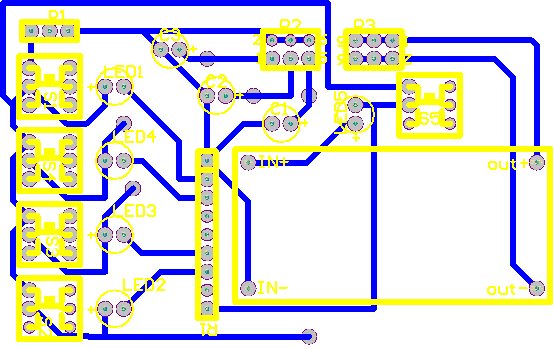
附錄2:部分PCB設(shè)計(jì)圖
注:由于條件限制,所畫(huà)板子為單層板;且由于設(shè)備原因,布線很粗,圖中出現(xiàn)了警告,但并不影響正常使用。
2.1電源轉(zhuǎn)接板PCB
2.2 顯示模塊LCD12864轉(zhuǎn)接板
附錄3:部分關(guān)鍵程序
3.1 PID控制算法的實(shí)現(xiàn)程序
static float Kpx=18.7; //X 軸傾角乘以相應(yīng)系數(shù)進(jìn)行歸一化處理
static float Kdx=0.20; // X 軸角速度歸一化
static float Kpy=20.4; //Y 軸傾角實(shí)時(shí)傾角乘以相應(yīng)系數(shù)進(jìn)行歸一化處理
static float DY=0.20; // Y 軸角速度歸一化
float R;//半徑長(zhǎng)度;
float θ;//目標(biāo)傾角;
void Angle (void)
{
int X_PWM, Y_PWM;
int nSpeed;
int nPx, nDx;
int nPy, nDy;
θ = arctan(R/L);
nPx= (int)(θ-angle x)*Kpx; //X 軸傾角與目標(biāo)值的偏差,比例環(huán)節(jié)
nDx = (int)speed_x*Kdx; //擺桿 X 軸向角速度,微分環(huán)節(jié)
nSpeedx = nDx + nPx; //實(shí)時(shí)角度+實(shí)時(shí)角速度,作為控制輸入量
nPy= (int)(0-angel_y)*Kpy; //擺桿 Y 軸向傾角,比例環(huán)節(jié)
nDy = (int)speed_y*Kdy; //擺桿 Y 軸向角速度,微分環(huán)節(jié)
nSpeedy = nDy + nPy; //實(shí)時(shí)角度+實(shí)時(shí)角速度,作為控制輸入量
X_PWM = nSpeedx*; //轉(zhuǎn)化成 PWM 脈寬調(diào)制的直接控制量
Y_PWM = nSpeedy;
Motor (X_PWM, Y_PWM);//輸出 PWM 信號(hào)作用于軸流風(fēng)機(jī)
}
在本系統(tǒng)的PID控制中,所采用的方法基本與上述程序相同。不同之處在于,完成不同的控制任務(wù),所整定的參數(shù)是不一樣的。這里不一一列舉。
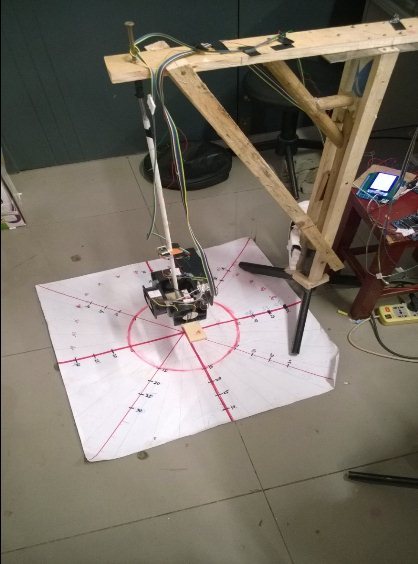
附錄4:系統(tǒng)整體照片
4.1系統(tǒng)外觀
4.2 風(fēng)機(jī)排布
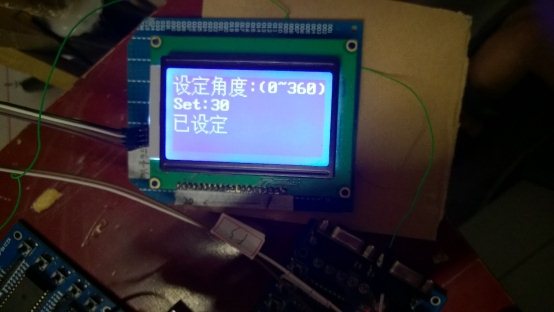
4.3工作中的計(jì)時(shí)器
4.4工作中的菜單顯示模塊
完整的Word格式文檔51黑下載地址:
作者: 人生如狗 時(shí)間: 2018-7-19 04:19
源碼等完整資料打包下載:http://www.raoushi.com/bbs/dpj-128740-1.html
作者: pomelo0203 時(shí)間: 2019-5-22 15:51
好棒,樓主這個(gè)想法不錯(cuò)
| 歡迎光臨 (http://www.raoushi.com/bbs/) |
Powered by Discuz! X3.1 |


 風(fēng)力擺控制系統(tǒng).docx
(1.35 MB, 下載次數(shù): 68)
風(fēng)力擺控制系統(tǒng).docx
(1.35 MB, 下載次數(shù): 68)