��(bi��o)�}: Ԕ��(x��)�ij������:���̌��F(xi��n)��Ƭ�C(j��)ds18b20�ضȜy�����@ʾϵ�y(t��ng) [��ӡ���]
����: 15856431200 �r�g: 2018-3-27 23:09
��(bi��o)�}: Ԕ��(x��)�ij������:���̌��F(xi��n)��Ƭ�C(j��)ds18b20�ضȜy�����@ʾϵ�y(t��ng)
���̌��F(xi��n)���چ�Ƭ�C(j��)�ĜضȜy�����@ʾϵ�y(t��ng)
- �����_�l(f��)���ϵ�ds18b20�������y����(d��ng)ǰ�ضȣ����Ô�(sh��)�a��ݔ����(d��ng)ǰ�ض�ֵ��
���F(xi��n)�Y(ji��)����
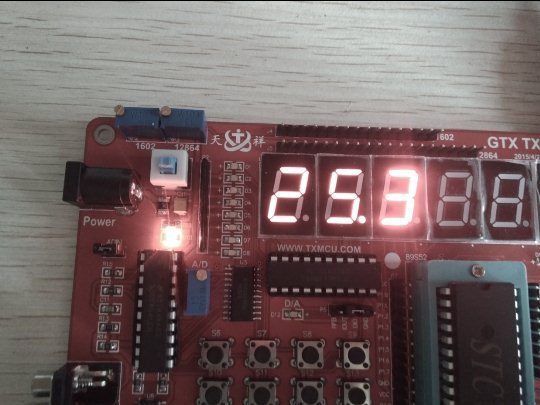
�yԇ�Y(ji��)���@ʾ��(d��ng)ǰ�z�Ϝض�25.3�ȡ�
���F(xi��n)ԭ����
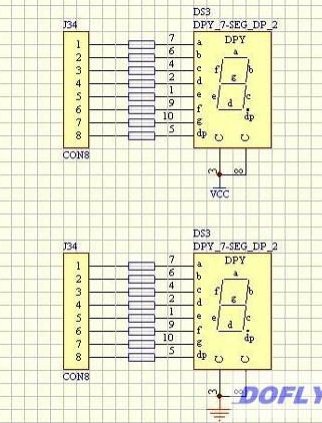
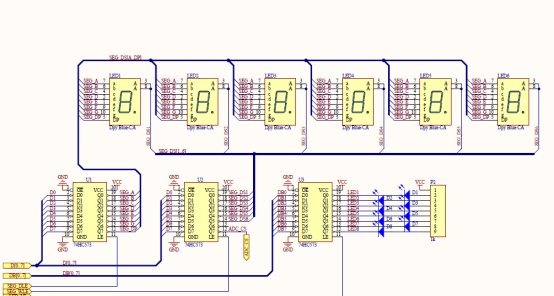
��1����(d��)����(sh��)�a��
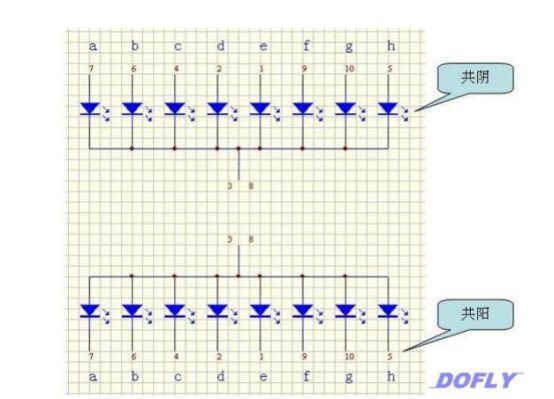
��(sh��)�a�ܷ֞鹲ꖘO��ꎘO��(sh��)�a�ܣ�
ͨ�^���Ɣ�(sh��)�a���е�8�����O�ܣ����@ʾ��(sh��)�֡�
��2����λ��ꎔ�(sh��)�a�ܺ�ꖔ�(sh��)�a��
���Ŀʹ�õ���6λ��ꎔ�(sh��)�a�ܡ�
��(sh��)�a�ܿ�����Ҫͨ�^���i���λ�i������@ʾҪ�@ʾ�Ĕ�(sh��)����ضȡ����i����ָ6λ��ꎘO��(sh��)�a�ܶ�ݔ�����B���i����74HC573��ݔ���ˣ��i������ݔ����B�ӆ�Ƭ�C(j��)�ӿ�P0��λ�i����ָ6λ��(sh��)�a��λ��ݔ�����B���i����74HC573��ݔ���ˣ��i������ݔ����B�ӆ�Ƭ�C(j��)�ӿ�P0�����i����Ƭ�x�˽ӆ�Ƭ�C(j��)�ӿ�P2.6��λ�i����Ƭ�x�˽ӆ�Ƭ�C(j��)�ӿ�P2.7��
�B�ӈD���£�
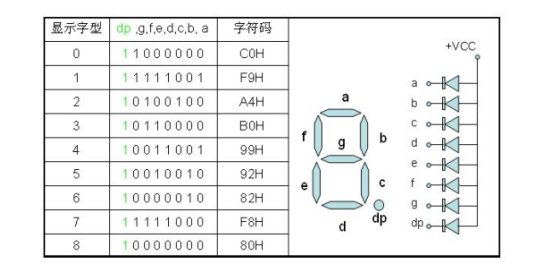
����������ضȂ�����DS18B20�ӆ�Ƭ�C(j��)P2.2�����i���P2.6��λ�i���P2.7��unsigned char code table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
�@ʾ�δaֵ0~9��Unsigned char code table1[]={0xbf,0x86,0xdb,0xcf,0xe6,0xed,0xfd,0x87,0xff,0xef};
�քe����(y��ng)����(y��ng)�Ĕ�(sh��)�a���c��,��λ�a��
�ضȂ������ij����Мy�صij��y�õĜض�ͨ�^��(sh��)�a���@ʾ����������ʹ�����ӕr���Д��ӳ���
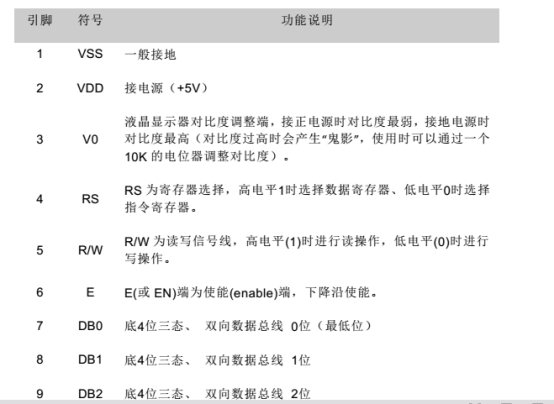
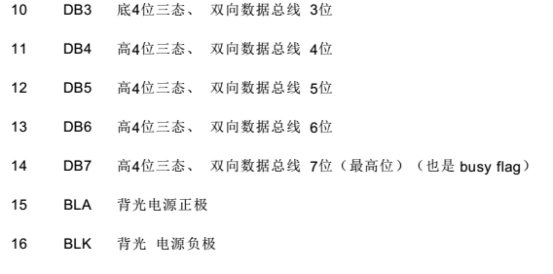
- ��Һ����1602���F(xi��n)�ض��@ʾ��
- ���ð��I���F(xi��n)�z�ϜضȺ��A�Ϝضȵ��D(zhu��n)�Q�����@ʾ��
���F(xi��n)�Y(ji��)����
����S2���@ʾ�z�Ϝض�����
����S2���@ʾ�A�Ϝض�����
���F(xi��n)ԭ����
��֮ǰ�Ĝض��@ʾģ�K���밴�I���ܳ������ÃɷN�ض��D(zhu��n)�Q��ʽ�A�Ϝض�=(�z�Ϝض�*9/5)+32���F(xi��n)�D(zhu��n)�Q��
���P(gu��n)�������£�- void display(uint temp,uint hstemp) //�@ʾ����
- {
-
- if(s2==0)
- {
-
- ser=temp/10;
- SBUF=ser;
- A1=temp/100;
- A2t=temp%100;
- A2=A2t/10;
- A3=A2t%10;
- dula=0;
- P0=table[A1]; //�@ʾ��λ
- dula=1;
- dula=0;
-
- wela=0;
- P0=0x7e;
- wela=1;
- wela=0;
- delay(1);
-
- dula=0;
- P0=table1[A2]; //�@ʾʮλ
- dula=1;
- dula=0;
-
- wela=0;
- P0=0x7d;
- wela=1;
- wela=0;
- delay(1);
-
- P0=table[A3]; //�@ʾ��λ
- dula=1;
- dula=0;
-
- P0=0x7b;
- wela=1;
- wela=0;
- delay(1);
- }
- if(s3==0)
- {
-
- ser1=hstemp/10;
- SBUF=ser1;
- A11=hstemp/100;
- A21t=hstemp%100;
- A21=A21t/10;
- A31=A21t%10;
- dula=0;
- P0=table[A11]; //�@ʾ��λ
- dula=1;
- dula=0;
-
- wela=0;
- P0=0x7e;
- wela=1;
- wela=0;
- delay(1);
-
- dula=0;
- P0=table1[A21]; //�@ʾʮλ
- dula=1;
- dula=0;
-
- wela=0;
- P0=0x7d;
- wela=1;
- wela=0;
- delay(1);
-
- P0=table[A31]; //�@ʾ��λ
- dula=1;
- dula=0;
-
- P0=0x7b;
- wela=1;
- wela=0;
- delay(1);
- }
- }
���������s2��s3�������I�քe���چ�Ƭ�C(j��)P3.4,p3.5�ϣ���(d��ng)���I���r��Ƭ�C(j��)����(y��ng)�ӿ��@ʾ���ƽ�����_�@ʾ���ƽ����(d��ng)�z�y��S2���r���@ʾ�z�Ϝضȡ���(d��ng)�z�y��S3���r���@ʾ�A�Ϝضȡ����������£�
if(s2==0)
{
SendByte(A1*10+A2);
SendStr(".");
SendByte(A3);
}
if(s3==0)
{
SendByte(A11*10+A21);
SendStr(".");
SendByte(A3);
}
- ���ô��ڌ���(d��ng)ǰ�ض�ֵ�l(f��)������X����X���������������M(j��n)�н��պ��@ʾ��
���F(xi��n)ԭ����
�B�Ӻô��ڻ���usb�D(zhu��n)��������X�����dԓ�����_�Դ�� ���_�����{(di��o)ԇ�����������O(sh��)�Þ�9600���o��żУ����11.0592MHz���l(f��)�ͺͽ���ʹ�õĸ�ʽ��ͬ��
����ͨӍ����������ڳ�ʼ����ݔ���ֹ�(ji��)����(sh��)��ݔ���ַ�������(sh��)��������(sh��)���ضȂ������y�õĜضȔ�(sh��)ֵͨ�^����ͨӍ����ݔ���@ʾ����X�ϡ�
���F(xi��n)�Y(ji��)����
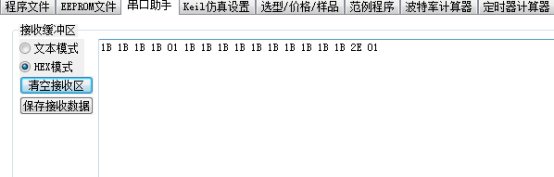
��(d��ng)����S2���I����X�@ʾ���£�
�l(f��)�ͺͽ��ն���16�M(j��n)�ƣ�1B=1*16+11*1=27��2E����С��(sh��)�c��01=1�������@ʾ�ض�27.2�z�϶ȡ�
��(d��ng)����S3���I����X�@ʾ���£�
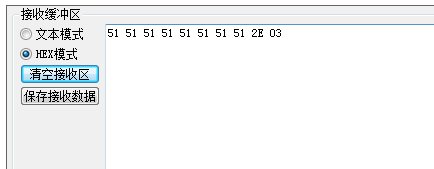
�l(f��)�ͺͽ��ն���16�M(j��n)�ƣ�51=5*16+1*1=81��2E����С��(sh��)�c��03=3�������@ʾ�ض�81.3�A�ϡ�
��Ƭ�C(j��)Դ��������:
- //���bĿ��µ�EXE�ļ����_�������X���@ʾ��(d��ng)ǰ�ض�ֵ
- #include <reg52.h>
- #define uchar unsigned char
- #define uint unsigned int
- sbit DS=P2^2; //define interface
- uint temp; // variable of temperature
- uchar flag1; // sign of the result positive or negative
- sbit dula=P2^6;
- sbit wela=P2^7;
- sbit s2=P3^4;
- sbit s3=P3^5;
- uchar A1,A2,A2t,A3,ser,A11,A21,A21t,A31,ser1;
- unsigned char code table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,
- 0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
- unsigned char code table1[]={0xbf,0x86,0xdb,0xcf,0xe6,0xed,0xfd,
- 0x87,0xff,0xef}��
-
-
- void SendStr(unsigned char *s);
- /*------------------------------------------------
- ���ڳ�ʼ��
- ------------------------------------------------*/
- void InitUART (void)
- {
-
- SCON = 0x50; // SCON: ģʽ 1, 8-bit UART, ʹ�ܽ���
- TMOD |= 0x20; // TMOD: timer 1, mode 2, 8-bit ���b
- TH1 = 0xFD; // TH1: ���bֵ 9600 ������ ���� 11.0592MHz
- TR1 = 1; // TR1: timer 1 ���_
- EA = 1; //���_����
- //ES = 1; //���_������
- }
- void delay(uint count) //delay
- {
- uint i;
- while(count)
- {
- i=200;
- while(i>0)
- i--;
- count--;
- }
- }
- void DelayUs2x(unsigned char t)
- {
- while(--t);
- }
- /*------------------------------------------------
- mS�ӕr����(sh��)������ݔ��?y��n)��?sh��) unsigned char t���o����ֵ
- unsigned char �Ƕ��x�o��̖�ַ�׃������ֵ�ķ�����
- 0~255 �@��ʹ�þ���12M�����_�ӕrՈʹ�ÅR��
- ------------------------------------------------*/
- void DelayMs(unsigned char t)
- {
-
- while(t--)
- {
- //�����ӕr1mS
- DelayUs2x(245);
- DelayUs2x(245);
- }
- }
- ///////����:���ڳ�ʼ��,������9600����ʽ1///////
- void Init_Com(void)
- {
- TMOD = 0x20;
- PCON = 0x00;
- SCON = 0x50;
- TH1 = 0xFd;
- TL1 = 0xFd;
- TR1 = 1;
- }
-
- void dsreset(void) //send reset and initialization command
- {
- uint i;
- DS=0;
- i=103;
- while(i>0)i--;
- DS=1;
- i=4;
- while(i>0)i--;
- }
-
- bit tmpreadbit(void) //read a bit
- {
- uint i;
- bit dat;
- DS=0;i++; //i++ for delay
- DS=1;i++;i++;
- dat=DS;
- i=8;while(i>0)i--;
- return (dat);
- }
-
- uchar tmpread(void) //read a byte date
- {
- uchar i,j,dat;
- dat=0;
- for(i=1;i<=8;i++)
- {
- j=tmpreadbit();
- dat=(j<<7)|(dat>>1); //�x���Ĕ�(sh��)��(j��)���λ����ǰ�棬�@�ӄ���һ���ֹ�(ji��)��DAT��
- }
- return(dat);
- }
-
- void tmpwritebyte(uchar dat) //write a byte to ds18b20
- {
- uint i;
- uchar j;
- bit testb;
- for(j=1;j<=8;j++)
- {
- testb=dat&0x01;
- dat=dat>>1;
- if(testb) //write 1
- {
- DS=0;
- i++;i++;
- DS=1;
- i=8;while(i>0)i--;
- }
- else
- {
- DS=0; //write 0
- i=8;while(i>0)i--;
- DS=1;
- i++;i++;
- }
-
- }
- }
-
- void tmpchange(void) //DS18B20 begin change
- {
- dsreset();
- delay(1);
- tmpwritebyte(0xcc); // address all drivers on bus
- tmpwritebyte(0x44); // initiates a single temperature conversion
- }
-
- uint tmp() //get the temperature
- {
- float tt;
- uchar a,b;
- dsreset();
- delay(1);
- tmpwritebyte(0xcc);
- tmpwritebyte(0xbe);
- a=tmpread();
- b=tmpread();
- temp=b;
- temp<<=8; //two byte compose a int variable
- temp=temp|a;
- tt=temp*0.0625;
- temp=tt*10+0.5;
- return temp;
- }
-
- void readrom() //read the serial
- {
- uchar sn1,sn2;
- dsreset();
- delay(1);
- tmpwritebyte(0x33);
- sn1=tmpread();
- sn2=tmpread();
- }
-
-
- void delay10ms() //delay
- {
- uchar a,b;
- for(a=10;a>0;a--)
- for(b=60;b>0;b--);
- }
-
- void display(uint temp,uint hstemp) //�@ʾ����
- {
-
- if(s2==0)
- {
-
- ser=temp/10;
- SBUF=ser;
- A1=temp/100;
- A2t=temp%100;
- A2=A2t/10;
- A3=A2t%10;
- dula=0;
- P0=table[A1]; //�@ʾ��λ
- dula=1;
- dula=0;
-
- wela=0;
- P0=0x7e;
- wela=1;
- wela=0;
- delay(1);
-
- dula=0;
- P0=table1[A2]; //�@ʾʮλ
- dula=1;
- dula=0;
-
- wela=0;
- P0=0x7d;
- wela=1;
- wela=0;
- delay(1);
-
- P0=table[A3]; //�@ʾ��λ
- dula=1;
- dula=0;
-
- P0=0x7b;
- wela=1;
- wela=0;
- delay(1);
- }
- if(s3==0)
- {
-
- ser1=hstemp/10;
- SBUF=ser1;
- A11=hstemp/100;
- A21t=hstemp%100;
- A21=A21t/10;
- A31=A21t%10;
- dula=0;
- P0=table[A11]; //�@ʾ��λ
- dula=1;
- dula=0;
-
- wela=0;
- P0=0x7e;
- wela=1;
- wela=0;
- delay(1);
-
- dula=0;
- P0=table1[A21]; //�@ʾʮλ
- dula=1;
- dula=0;
-
- wela=0;
- P0=0x7d;
- wela=1;
- wela=0;
- delay(1);
-
- P0=table[A31]; //�@ʾ��λ
- dula=1;
- dula=0;
-
- P0=0x7b;
- wela=1;
- wela=0;
- delay(1);
- }
- }
-
- void SendByte(unsigned char dat)
- {
- SBUF = dat;
- while(!TI);
- TI = 0;
- }
- void main()
- {
- uchar a;
- InitUART();
- Init_Com();
- do
- {
- tmpchange();
-
- for(a=10;a>0;a--)
- { display(tmp(),(tmp()*9/5)+320);
- // delay(200);
- }
- if(s2==0)
- {
- SendByte(A1*10+A2);
- SendStr(".");
- SendByte(A3);
-
- }
- if(s3==0)
- {
- SendByte(A11*10+A21);
- SendStr(".");
- SendByte(A3);
- }
-
- DelayMs(240);//�ӕrѭ�h(hu��n)�l(f��)��
- DelayMs(240);
- } while(1);
- }
-
- /*------------------------------------------------
- �l(f��)��һ���ַ���
- ------------------------------------------------*/
- void SendStr(unsigned char *s)
- {
- while(*s!='\0')// \0 ��ʾ�ַ����Y(ji��)����(bi��o)־��
- //ͨ�^�z�y�Ƿ��ַ���ĩβ
- {
- SendByte(*s);
- s++;
- }
- }
-
- Һ���@ʾ�ضȳ���
- #include <reg52.H>
- #include <intrins.H>
- #include <math.H>
-
- #define uchar unsigned char
- #define uint unsigned int
- sbit dula = P2^6;
- sbit wela = P2^7;
-
- sbit RS = P3^5;
- sbit LCDEN = P3^4;
-
- void delayUs()
- {
- _nop_();
- }
-
- void delayMs(uint a)
- {
- uint i, j;
- for(i = a; i > 0; i--)
- for(j = 100; j > 0; j--);
- }
-
-
- void writeComm(uchar comm)
- {
- RS = 0;
- P0 = comm;
- LCDEN = 1;
- delayUs();
- LCDEN = 0;
- delayMs(1);
- }
-
- //����(sh��)��(j��):RS=1, RW=0;
- void writeData(uchar dat)
- {
- RS = 1;
- P0 = dat;
- LCDEN = 1;
- delayUs();
- LCDEN = 0;
- delayMs(1);
- }
-
-
- void init()
- {
-
- dula = wela = 0;
- writeComm(0x38);
- writeComm(0x0c);
- writeComm(0x06);
- writeComm(0x01);
- }
-
- void writeString(uchar * str, uchar length)
- {
- uchar i;
- for(i = 0; i < length; i++)
- {
- writeData(str[i]);
- }
- }
-
- /**//*****************************DS18B20*******************************/
- sbit ds = P2^2;
- void dsInit()
- {
-
- unsigned int i;
- ds = 0;
- i = 100;
- while(i>0) i--;
- ds = 1;
- i = 4;
- while(i>0) i--;
- }
-
- void dsWait()
- {
- unsigned int i;
- while(ds);
- while(~ds);
- i = 4;
- while(i > 0) i--;
- }
-
-
- bit readBit()
- {
- unsigned int i;
- bit b;
- ds = 0;
- i++;
- ds = 1;
- i++; i++;
- b = ds;
- i = 8;
- while(i>0) i--;
- return b;
- }
-
- unsigned char readByte()
- {
- unsigned int i;
- unsigned char j, dat;
- dat = 0;
- for(i=0; i<8; i++)
- {
- j = readBit();
-
- dat = (j << 7) | (dat >> 1);
- }
- return dat;
- }
-
-
- void writeByte(unsigned char dat)
- {
- unsigned int i;
- unsigned char j;
- bit b;
- for(j = 0; j < 8; j++)
- {
- b = dat & 0x01;
- dat >>= 1;
-
- if(b)
- {
- ds = 0; i++; i++;
- ds = 1;
- i = 8; while(i>0) i--;
- }
- else
- {
- ds = 0;
- i = 8; while(i>0) i--;
- ds = 1;
- i++; i++;
- }
- }
- }
-
-
- void sendChangeCmd()
- {
- dsInit();
- dsWait();
- delayMs(1);
- writeByte(0xcc);
- writeByte(0x44);
- }
-
- void sendReadCmd()
- {
- dsInit();
- dsWait();
- delayMs(1);
- writeByte(0xcc);
- writeByte(0xbe);
- }
-
-
- int getTmpValue()
- {
- unsigned int tmpvalue;
- int value;
- float t;
- unsigned char low, high;
- sendReadCmd();
-
- low = readByte();
- high = readByte();
-
- tmpvalue = high;
- tmpvalue <<= 8;
- tmpvalue |= low;
- value = tmpvalue;
-
- \
- t = value * 0.0625;
- \
- value = t * 100 + (value > 0 ? 0.5 : -0.5); //����0��0.5, ��0�p0.5
- return value;
- }
-
- void display(int v)
- {
- unsigned char count;
- unsigned char datas[] = {0, 0, 0, 0, 0};
- unsigned int tmp = abs(v);
- datas[0] = tmp / 10000;
- datas[1] = tmp % 10000 / 1000;
- datas[2] = tmp % 1000 / 100;
- datas[3] = tmp % 100 / 10;
- datas[4] = tmp % 10;
- writeComm(0xc0+3);
- if(v < 0)
- {
- writeString("- ", 2);
- }
- else
- {
- writeString("+ ", 2);
- }
- if(datas[0] != 0)
- {
- writeData('0'+datas[0]);
- }
- for(count = 1; count != 5; count++)
- {
- writeData('0'+datas[count]);
- if(count == 2)
- ����������������
- �����������ڱ���ƪ�� ���´��aՈ��51�����d������������
�����Y��51hei�ṩ���d:
 ��Ƭ�C(j��)�ĜضȜy�����@ʾϵ�y(t��ng).docx
(1.66 MB, ���d��(sh��): 70)
��Ƭ�C(j��)�ĜضȜy�����@ʾϵ�y(t��ng).docx
(1.66 MB, ���d��(sh��): 70)
2018-3-27 23:08 �ς�
�c���ļ������d����
��Ƭ�C(j��)
���d�e��: �ڎ� -5
����: why___1997 �r�g: 2018-6-26 23:14
�dz����x����
����: lorraine �r�g: 2018-6-27 08:49
GANXIE
����: ��(qi��ng)lan �r�g: 2018-12-2 16:02
�x�x�����ķ������F(xi��n)�����ѽ�(j��ng)���������ˆ�Ƭ�C(j��)��(n��i)���@�������Ę�(g��u)���ˣ��������҂��İ��Ӳ�һ�ӣ�߀�����һЩ׃�����ҿ���������߀��Ҫ�úÌW(xu��)��(x��)���С�
����: Hopeful �r�g: 2020-1-16 19:54
���x����
����: gao687 �r�g: 2022-6-24 11:39
����ʹ�ã����aԔ��(x��)
| �gӭ���R (http://www.raoushi.com/bbs/) |
Powered by Discuz! X3.1 |