�D1���(q��)��ϵ�y(t��ng)�Y(ji��)��(g��u)��D��
�����������(n��i)�Ј���늄�܇ʹ�õ�늙C(j��)��Ҫ�����N����ˢ늙C(j��)����λ�Â������oˢ늙C(j��)�͟oλ�Â������oˢ늙C(j��)��ʹ����ˢֱ��늙C(j��)����Q�Q�����}��������������̼ˢ����ĥ�p��p�ģ��@������S�o(h��)���S���y�ȣ�����ʹ�óɱ���ʹ���Ђ������oˢֱ��늙C(j��)���״_���D(zhu��n)��λ�ã���Q�Q�����}�����s������늙C(j��)���O(sh��)Ӌ������Ͱ��b�y�ȣ�Ҳ�����˳ɱ������҂��������דp�ģ���(d��o)��늙C(j��)��ʹ�É����s�̣��o�������oˢֱ��늙C(j��)�Q���mȻ�ڼ��g(sh��)�����y
�����������(n��i)�Ј���늄�܇ʹ�õ�늙C(j��)��Ҫ�����N����ˢ늙C(j��)����λ�Â������oˢ늙C(j��)�͟oλ�Â������oˢ늙C(j��)��ʹ����ˢֱ��늙C(j��)����Q�Q�����}��������������̼ˢ����ĥ�p��p�ģ��@������S�o(h��)���S���y�ȣ�����ʹ�óɱ���ʹ���Ђ������oˢֱ��늙C(j��)���״_���D(zhu��n)��λ�ã���Q�Q�����}�����s������늙C(j��)���O(sh��)Ӌ������Ͱ��b�y�ȣ�Ҳ�����˳ɱ������҂��������דp�ģ���(d��o)��늙C(j��)��ʹ�É����s�̣��o�������oˢֱ��늙C(j��)�Q���mȻ�ڼ��g(sh��)�����y�ȣ����ڳɱ��͉����ϸ����םM�����M������
�C���������c������ӑՓ�ķ����x�����ԃr���^�ߵğo�������oˢֱ��늙C(j��)����HT46R6?������оƬ���÷�늄ݷ�(back eleCTRomotive force)���F(xi��n)늙C(j��)�����Q�࣬ܛӲ�Y(ji��)�ϣ�ʹ늄�܇�(q��)��ϵ�y(t��ng)��������Ѡ�B(t��i)���Ķ���߮a(ch��n)Ʒ�Ŀɿ��Ժ�ʹ�É�����
ϵ�y(t��ng)����ԭ��
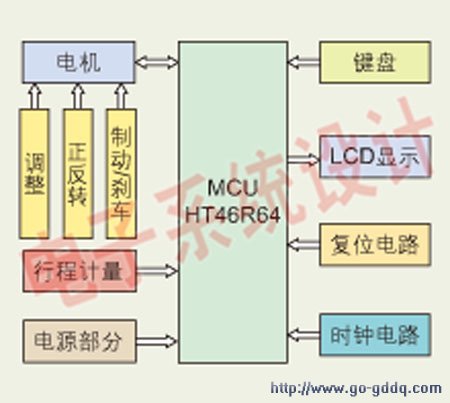
����ϵ�y(t��ng)�Y(ji��)��(g��u)��D��D1��ʾ����Ҫ��MCU��ֱ���oˢ늙C(j��)��LCDҺ���@ʾ�����I�P���Դ���r犵�ģ�K�M�ɡ�����MCU�����_��HoLTEk��˾���a(ch��n)��HT46R6?̎��������������ϵ�y(t��ng)���ģ��BͬһЩ���Ӳ���������ܛ����ͬ����ֱ���oˢ늙C(j��)���Ķ����F(xi��n)ԓ�(q��)��ϵ�y(t��ng)�ă�(y��u)�����ܡ�����ͨ�^MCUָ�����늙C(j��)�������D(zhu��n)���{(di��o)�١��x܇���Ƅӵȡ�����(j��)늙C(j��)���D(zhu��n)Ȧ��(sh��)Ӌ���г̣����Ԕ�(sh��)����ʽ�ʬF(xi��n)��Һ�����ϣ�ͨ�^�I�P��������鿴�г��Լ�����ϵ�y(t��ng)��Ϣ���Դģ�K��Ҫ�����ڲ���Ҫ�@ʾ�r�Д�����(y��ng)�����·��ͬ�r�����P(gu��n)�I��Ϣ���Խ���ϵ�y(t��ng)���ġ�
�D1���(q��)��ϵ�y(t��ng)�Y(ji��)��(g��u)��D��
�ɈD1���Կ��������(q��)�ӿ���������Ҫ���ܴ��·֞��������֣�늙C(j��)���֡��г�Ӌ���Լ�LCD�@ʾ��������Ҫ���@�o������늙C(j��)�ēQ�����}չ�_��
1. ��늄ݓQ��ԭ��
������������늙C(j��)��ʹ�ÏV������λ�Â�����ֱ���oˢ늙C(j��)���ǿ��������������_���D(zhu��n)��λ�ã���ʹ���Ӹ����@�M���?q��)�ͨ���F(xi��n)�Q�ࣻ���o������ֱ���oˢ�C(j��)�t��������Ӿ�·����λ�Â�����(�D2)��ͨ�^�z�y늙C(j��)���\���^���Юa(ch��n)���ķ�늄��^���c���_���D(zhu��n)��λ�ã����F(xi��n)�Q�࣬�����������@�M�����M(j��n)һ���f����
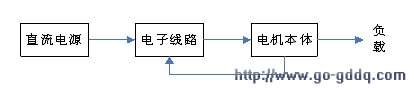
�D2������Ӿ�·����?zh��n)������Y(ji��)��(g��u)��D��
늙C(j��)���\���^����Ҫ��(j��ng)�^6�ΓQ�࣬ÿ�ΓQ���r����һ���@�Mδͨ늣��˕r������ԓ���@�M�˿ڙz�y���@�M�a(ch��n)���ķ�늄ݣ���늄���60��늽Ƕȃ�(n��i)���B�m(x��)�ġ�����늙C(j��)��Ҏ(gu��)�����칤ˇ�в����(d��o)����ͬ늽Ƕȵķ�늄�ֵ��ͬ�����Ҫͨ�^�z�y��늄ݵĔ�(sh��)ֵ���_���D(zhu��n)��λ�ã��y�ȷdz�����˱���ҵ�ԓ��늄��c�D(zhu��n)��λ�õ��P(gu��n)ϵ�����ܴ_���D(zhu��n)��λ�á��ɈD3��֪����늄���60���늽Ƕ��^���п���һ�ν�(j��ng)�^����(bi��o)�M�S(�^���c)������̎��늽ǶȺ���һ�ΓQ���c��늽Ƕ��������30�㣬�ʿ�ͨ�^�z�y��늄��^���c�����ӕr30��Q�ࡣ���O(sh��)Ӌ�Ǐı��z�y������_ʼӋ�r�ȴ���늄��^���c�����ӕr�ȴ�����(y��ng)�r�g�����F(xi��n)�Q�ࡣ
| �gӭ���R (http://www.raoushi.com/bbs/) | Powered by Discuz! X3.1 |